三相步进电机控制程序设计
大学毕业设计 C51程序控制步进电机

题目:简易步进电机控制步进电机控制摘要:本设计采用ATMEL公司DIP-40封装的AT89S52单片机实现对四相步进电机的手动和按键控制。
由单片机产生的脉冲信号经过分配后分解出对应的四相脉冲,分解出的四相脉冲经驱动电路功率放大后驱动步进电机的转动。
转速的调节和状态的改变由按键进行选择,此过程由程序直接进行控制。
通过键盘扫描把选择的信息反馈给单片机,单片机根据反馈信息做出相应的判断并改变输出脉冲的频率或转动状态信号。
电机转动的不同状态由液晶LCD1602显示出来。
而设计的扩展部分可以通过红外信号的发射由另一块单片机和红外线LED完成,用红外万能接收头接收红外信号,可以实现对电机的控制进行红外遥控。
关键字:四相步进电机单片机功率放大 LCD1602步进电机控制 (1)摘要 (1)关键字 (1)前言 (3)1系统总体方案设计及硬件设计 (4)1.1步进电机 (4)1.1.1 步进电机的种类 (4)1.1.2 步进电机的特点 (4)1.1.3 步进电机的原理 (5)1.2 控制系统电路设计 (7)1.3 液晶显示LCD1602 (7)1.4 AT89S52核心部件及系统SCH原理图 (9)1.5 LN2003A驱动 (10)2软件设计及调试 (13)2.1程序流程 (13)2.2软件设计及调试 (14)3 扩展功能说明 (15)4设计总结 (16)5 设计源程序 (16)6 附录 (21)参考文献 (22)附2:系统原理图及实物图 (23)步进电机广泛应用于对精度要求比较高的运动控制系统中,如机器人、打印机、软盘驱动器、绘图仪、机械阀门控制器等。
目前,对步进电机的控制主要有由分散器件组成的环形脉冲分配器、软件环形脉冲分配器、专用集成芯片环形脉冲分配器等。
分散器件组成的环形脉冲分配器体积比较大,同时由于分散器件的延时,其可靠性大大降低;软件环形分配器要占用主机的运行时间,降低了速度;专用集成芯片环形脉冲分配器集成度高、可靠性好,但其适应性受到限制,同时开发周期长、需求费用较高。
步进电机的PLC控制梯形图程序设计

2 梯形图程序设计
2. 1 输入/ 输出编址 控制步进电机的各输入开关及控制 A 、B 、C
三相绕组工作的输出端在 PL C 中的 I/ O 编址如 表 1 所示 。
表 1 输入/ 输出编址
输入端
I0. 0 步进电机正转起动按钮 Q0. 0
I0. 1 步进电机反转起动按钮 Q0. 1
I0. 2
A 相 Q0. 0 = M0. 5 + M0. 4 + M0. 0 B 相 Q0. 1 = M0. 4 + M0. 3 + M0. 2 C 相 Q0. 2 = M0. 2 + M0. 1 + M0. 0 反转时 A 相 Q0. 0 = M0. 5 + M0. 4 + M0. 0 B 相 Q0. 1 = M0. 2 + M0. 1 + M0. 0 C 相 Q0. 2 = M0. 4 + M0. 3 + M0. 2
Abstract : The PL C program cont rolling on t he stepping motor can be designed by diverse means. The paper put s forward t he design t hinking and met hod. The ladder program is programmed wit h“SHIF T”inst ruc2 tion of SIMA TIC S7 - 200 as t he keystone of cont rolling step - by - step and by means of program modu2 larization. Thus t he ladder is compact ,clear and flexible , and quite meet s t he cont rol requirement s. Key words : stepping motor ; PL C ; ladder ; SHIF T ; modularization
第3章 步进电动机的控制-1

这种反应式步进电动机的步距角较大,不适合一般用途的要求。
4.小步距角步进电动机
图3-1所示为三相反应式步进电动机。设m为相数,z为 转子的齿数则齿距:
tb 360 z
因为每通电一次(即运行一拍),转子就走一步,各 相绕组轮流通电一次,转子就转过一个齿距。故步距角:
b
齿距 拍数 齿距 Km 360 Km z
通电方式: 从一相通电改换成另一相通电,即通电方式改变一次叫 “一拍”。步进电动机有单相轮流通电、双相轮流通电和单 双相轮流通电的方式。
3.多段反应式步进电机结构及工作原理
前面介绍的单段反应式步进电机是按 径向分相的,此外,还有一种反应式 步进电机是按轴向分相,这种步进电 机又称为多段反应式步进电机。 多段反应式步进电机是沿轴向分成磁 性相对独立的几段,每一段都有一组 励磁绕组,形成一相,因此,三相电 动机有三段,其结构如图3-2所示。 图3-2 三段三相反应式步进电动 机结构原理图
一、步进电动机的种类
1.按运动方式来分:分为旋转运动、直线运动、平面运动(印刷绕组式)和 滚切运动式步进电机。 2.按工作原理来分:分为反应式(磁阻式)、电磁式、永磁式、永磁感应式 (混合式)步进电机。 3.按其工作方式来分:分为功率式和伺服式。前者输出转矩较大,能直接带 动较大的负载;后者输出转矩较小,只能带动较小的负载,对于大负载需通 过液压放大元件来传动。 4.按结构来分:分为单段式(径向式)、多段式(轴向式)、印刷绕组式。 5.按相数来分:分为三相、四相、五相、六相等。 6.按使用频率来分:分为高频步进电机和低频步进电机。 不同类型步进电机其工作原理、驱动装臵也不完全一样,但其工作过程 基本是相同的。
(3-2)
若通电方式和系统的传动比已初步确定,则步距角应满足:
基于plc控制的步进电机控制系统设计论文

基于PLC的步进电机控制系统设计机械电子专业 XXX指导教师 XXX摘要:以德国西门子公司小型可编程逻辑控制器S7—200为中央处理单元,以步进电机作为控制对象。
介绍了PLC的概念原理以与控制的优点,步进电机的概念与工作原理,现状以与发展方向。
PLC 与步进电动机一起结合起来有很高的研究价值与意义。
本文在介绍步进电机控制特点的基础上,重点研究了步进电机的控制策略。
设计了控制系统的硬件方案,并编写了相应的控制流程,测试了实际控制效果,并提出相应的整改措施,达到更加合理高效的目标。
对于使用步进驱动器的步进控制系统,控制器对步进电机的控制关键在于控制脉冲信号的产生。
介绍了使用该控制器产生控制脉冲信号的多种不同实现方法,进而实现对步进电机不同控制方法。
关键词:可编程逻辑控制器;步进电机;控制策略;控制流程The Research Of Stepper Control Method Motor Based OnPLC Student majoring inMachinery and electronics specialtyXXXTutorXXXAbstract:With small Germany Siemens S7-200 programmable logic controller of the central processing unit, with stepping motor as control object. This paper introduces the concept of PLC principle and advantage of the control, the concept and working principle of stepper motor, the current situation and development direction. PLC combined with stepper motor has a high research value and significance. In this paper, based on the introduction to the characteristics of the stepper motor control, step motor control strategies are researched. Design the hardware of the control system scheme, and write the corresponding control process, test the actual control effect, and puts forward the corresponding rectification measures, achieve more reasonable and efficient. For using stepper drive stepper control system, the controller of stepper motor control is the key to control the generation of pulse signal. This paper introduces the control using the controller a variety of different implementation methods of the pulse signal, then the method to realize different control the stepper motor.1 / 23Keywords:Programmable logic controller; Stepping motor; The control strategy; Control the process引言伴随着经济的快速发展,科技的日新月异,产品更新换代周期缩短,生产效率有了更高的要求,特别是计算机技术的广泛的推广和普与,信息产业发挥了它无与伦比的优越性和高效性,其中可编程逻辑器件就有了更多的用武之地。
三相步进电机的控制
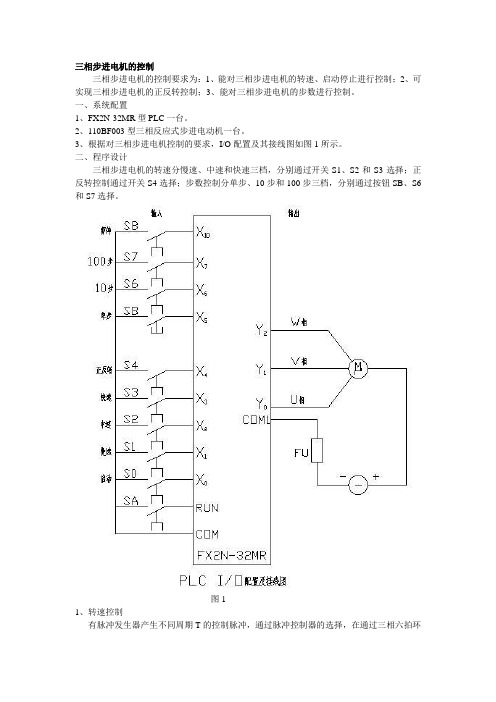
三相步进电机的控制三相步进电机的控制要求为:1、能对三相步进电机的转速、启动停止进行控制;2、可实现三相步进电机的正反转控制;3、能对三相步进电机的步数进行控制。
一、系统配置1、FX2N-32MR型PLC一台。
2、110BF003型三相反应式步进电动机一台。
3、根据对三相步进电机控制的要求,I/O配置及其接线图如图1所示。
二、程序设计三相步进电机的转速分慢速、中速和快速三档,分别通过开关S1、S2和S3选择;正反转控制通过开关S4选择;步数控制分单步、10步和100步三档,分别通过按钮SB、S6和S7选择。
图11、转速控制有脉冲发生器产生不同周期T的控制脉冲,通过脉冲控制器的选择,在通过三相六拍环形分配器使三个输出继电器Y0、Y1和Y2按照单双六拍的方式接通,其接通顺序为图2该过程对应于三相步进电机的通电顺序为图32、正反转控制通过正反转驱动环节(调换相序),改变Y0/Y1和Y2接通的顺序,以实现步进电机的正反转控制,即图4图53、步数控制通过脉冲计数器,控制六拍时序脉冲,以实现对步进电机步数的控制,三相步进电机控制的梯形图如图6所示。
三、调试运行程序将图6所示的梯形图换成程序写入plc的RAM,并调试运行程序。
图6 三相步进电机控制的梯形图续图61、转速控制选择慢速挡(接通S1),接通启动开关S0,脉冲控制器产生周期为1s的控制脉冲,使M0~M5的状态向右移位,产生六拍时序脉冲,并通过三相六拍环形分配器使Y0、Y1和Y2按照单双六拍的通电方式接通,步进电机开始慢速步进运行。
2、正反转控制先接通正反转开关S4,在重复上述转速控制操作。
3.步数控制先选择慢速挡(接通S1),在选择10步(接通S6),接通启动开关S0,六拍时序脉冲、三相六拍环形分配器开始工作,计数器开始计数。
当走完预订步数时,计数器动作,其常闭点断开移位驱动电路,六拍时序脉冲、三相六拍环形分配器及正反转驱动环节停止工作,步进电机停转。
三相混合式步进电机驱动器设计原理和控制详解
上海昀研自动化科技有限公司自2004年起致力于三相混合式步进电机及驱动器的开发,42系列低压三相混合式步进电机,57系列低压、高压三相混合式步进电机,86系列低压、高压三相混合式步进电机,110、130系列高压三相混合式步进电机,YK3605MA,TK3411MA,YK3822MA,YKA3722MA等多款产品已成功应用于市场。
上海昀研自动化科技有限公司生产的三相混合式步进电机采用交流伺服原理工作,转子和定子的直径比高达50%,高速时工作扭矩大,低速时运行极其平稳,几乎无共振区。
其配套驱动器YK3822MA具有单相220V/50Hz输入,三相正弦输出,输出电流可设置,具有十细分和半流额定值60%功能;控制方式灵活,有“脉冲+方向控制”,也有“正转脉冲+反转脉冲”控制方式;有过热保护功能,因此使用起来十分的方便。
1.前言步进电机是一种开环伺服运动系统执行元件,以脉冲方式进行控制,输出角位移。
与交流伺服电机及直流伺服电机相比,其突出优点就是价格低廉,并且无积累误差。
但是,步进电机运行存在许多不足之处,如低频振荡、噪声大、分辨率不高等,又严重制约了步进电机的应用范围。
步进电机的运行性能与它的驱动器有密切的联系,可以通过驱动技术的改进来克服步进电机的缺点。
相对于其他的驱动方式,细分驱动方式不仅可以减小步进电机的步距角,提高分辨率,而且可以减少或消除低频振动,使电机运行更加平稳均匀。
总体来说,细分驱动的控制效果最好。
因为常用低端步进电机伺服系统没有编码器反馈,所以随着电机速度的升高其内部控制电流相应减小,从而造成丢步现象。
所以在速度和精度要求不高的领域,其应用非常广泛。
因为三相混合式步进电机比二相步进电机有更好的低速平稳性及输出力矩,所以三相混合式步进电机比二相步进电机有更好应用前景。
传统的三相混合式步进电机控制方法都是以硬件比较器完成,本文主要讲述使用DSP及空间矢量算法SVPWM来实现三相混合式步进电机控制。
三相反应式步进电机驱动器的设计与实现

0 引言
人工智能是指研究、开发用于模拟、延伸和扩展人的职能 的理论、方法、技术级应用系统的一门新的技术科学[1],在工 程、技术研究等领域很多方面都有广泛的应用,为国民经济的 发展和人类生活的改善作出了巨大的贡献。以下将对人工智能 技术在电气自动化控制方面的应用作一探讨。
1 人工智能控制优势分析
人工智能控制的方法有很多种,对于不同的控制类型通常 采取不同的控制方法。人工智能主要利用人工智能函数近似器 加以处理[2],例如 AI 控制器,神经、模糊、模糊神经以及遗传算 法都可看成一类非线性函数近似器。它具有很多常规函数估计 器所不具备的优势:(1)设计思路简单。人工智能的设计不需要 控制对方的模型,而传统的古典控制器要在对方的模型上加以 设计,并且存在的不确定因素较多[3],例如很难得到控制对象 的精确动态方程,参数变化,非线性时往往不知道,也是造成传
步进电机以其良好的可操控性,在生产、生活的各个环节 都得到了广泛的应用,尤其是在自动化水平不断提高的今天, 步进电机更具有良好的应用前景,如在微控制、精确控制、特种 控制等方面发挥了重要作用。反应式步进电机步距角为 1.5°,转 子上均匀分布一些小齿,定子齿有 3 个励磁绕阻,其几何轴线依 次分别与转子齿轮轴线错开。电机的位置和速度与导电次数(脉 冲数)和频率成一一对应的关系,其方向由导电顺序决定。
统古典控制器的弊端。(2)控制器的性能得以提高。人工智能控 制器改变了相关参数,例如响应时间、下降时间等,性能得到很 大的提高。比如,现在使用的模糊逻辑控制器的上升时间比最 优 PID 控制器快 1.5 倍,下降时间快 3.5 倍。(3)简单容易操作。 古典控制器存在着调节能力差的缺陷,而人工智能控制器相对 而言降低了控制难度,对新信息和数据的适应能力也得到了改 进。在不具备相关专业知识的情况下,也可以通过相关信息提示 进行设计,相对而言简单且容易操作。
实验一三相异步电动机启停控制实验
实验⼀三相异步电动机启停控制实验实验⼀三相异步电动机启停控制实验⼀、实验⽬的:1.进⼀步学习和掌握接触器以及其它控制元器件的结构、⼯作原理和使⽤⽅法;2.通过三相异步电动机的启、停控制电路的实验,进⼀步学习和掌握接触器控制电路的结构、⼯作原理。
⼆、实验内容及步骤:图1-1为三相异步电动机的基本启停电路。
电路的基本⼯作原理是:⾸先合上电源开关QF5 ,再按下“启动”按钮,KM5得电并⾃锁,主触头闭合,电动机得电运⾏。
按下“停⽌”按钮,KM5失电,主触头断开,电动机失电停⽌。
实验步骤:1.按图1-1完成控制电路的接线;2.经⽼师检查认可后才可进⾏下⾯操作!3.合上断路器QF5,观察电动机和接触器的⼯作状态;4.按下操作控制⾯板上“启动”按钮,观察接触器和电动机的⼯作状态;5.按下操作控制⾯板上“停⽌”按钮,观察接触器和电动机的⼯作状态。
6.当未合上断路器QF5时,进⾏4和5步操作,观察结果。
图 1-1 三相异步电动机基本启停控制三.实验说明及注意事项1.本实验中,主电路电压为380VAC,请注意安全。
四.实验⽤仪器⼯具三相异步电动机 1台断路器(QF5) 1个接触器(KM5) 1个按钮 2个实验导线若⼲五.实验前的准备预习实验报告,复习教材的相关章节。
六.实验报告要求1.记录实验中所⽤异步电动机的名牌数据;2.弄清QF5型号和功能;3.⽐较实验结果和电路⼯作原理的⼀致性;4.说明6步的实验结果并分析原因。
七.思考题1.控制回路的控制电压是多少?2.接触器是交流接触器,还是直流接触器?接触器的⼯作电压是多少3.如果将A点的连线改接在B点,电路是否能正常⼯作?为什么?4.控制电路是怎样实现短路保护和过载保护的?5.电动机为什么采⽤直接启动⽅法?实验⼆三相异步电动机正反转控制实验⼀、实验⽬的:1.学习和掌握PLC的实际操作和使⽤⽅法;2.学习和掌握利⽤PLC控制三相异步电动机正反转的⽅法。
⼆、实验内容及步骤:本实验采⽤PLC对三相异步电动机进⾏正反转控制,其主电路和控制电路接线图分别为图2-1和图2-2 。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
目录第一章分析题目要求 (2)1.1 课题内容 (2)1.2 课题要求 (2)1.3 分析工艺流程 (2)第二章控制系统的I/O及地址分配 (4)第三章电气控制系统原理图 (5)3.1主电路图 (5)3.2 控制电路图 (5)3.3 外端子接线图 (5)第四章系统程序 (6)第五章有关步进电机的使用 (11)第六章总结 (15)6.1总结 (15)6.2参考文献 (16)第一章 分析题目要求1.1 课题内容用PLC 控制三相六拍步进电机,其控制要求如下: 1. 三相步进电动机有三个绕组:A 、B 、C , 正转通电顺序为:A →AB →B →BC →C →CA →A 反转通电顺序为:A →CA →C →BC →B →AB →A2. 要求能实现正、反转控制,而且正、反转切换无须经过停车步骤。
3. 具有两种转速:1号开关合上,则转过一个步距角需0.5秒。
2号开关合上,则转过一个步距角需0.05秒。
1.2 课题要求1. 按题意要求,画出PLC 端子接线图、控制梯形图。
2. 完成PLC 端子接线工作,并利用编程器输入梯形图控制程序,完成调试。
3. 完成课程设计说明书。
1.3 分析工艺流程本课题要求步进电机是三相六拍运行三相六拍正转通电顺序为:A →AB →B →BC →C →CA 三相六拍反转通电顺序为:A →CA →C →BC →B →AB所以我们可以根据通电的顺序,给相应的相序分配相应的地址,按照控制的要求我们就可以给出相应的控制程序。
该控制系统的控制原理图如下1-1:图1-1 系统控制原理图上位机 P L C 驱动器 功放电路 步进电机所以由以上控制系统的要求可以给出控制系统的程序流程图1-2:正转 反转 反转图1-2 程序控制流程图开始正反转速1运行转速2运行 转速1反向运行 转速2反向运行第二章控制系统的I/O及地址分配本控制系统的输入/输出信号的名称,代码及地址编号如表2-1表2-1名称代码地址编号输入信号启动按钮SB0 I0.0停止按钮SB1 I0.1 三相六拍电机正转SB2 I0.2 三相六拍电机反转SB3 I0.3 转过一个步距角0.5秒SB4 I0.4 转过一个步距角0.05秒SB5 I0.5输出信号A1,B1,C1 +24V(主机)A2 KM1 Q0.2B2 KM2 Q0.3C2 KM3 Q0.4第三章电气控制系统原理图3.1主电路图参照《电器与PLC控制技术试验指导书》实验16 三相步进电机的模拟控制,可以知道,我们可以用PLC直接去控制电机。
所以主电路是非常简单的,这里不再画出。
3.2 控制电路图控制电路由于用到的输入都是直接接在PLC上的,其控制过程相对比较简单。
在此略去。
3.3 外端子接线图分析上述要求可以知道,该控制系统有6个输入,三个输出,考虑到要留有余地,参照教材《电器与PLC控制技术》有关PLC选型的内容,我们可以选择CPU222(8入/6出)的PLC。
根据以上具体控制要求可以给出PLC的外端子接线图如下图3-1:图3-1 PLC外端子接线第四章系统程序根据题目要求给出以下梯形图:第五章有关步进电机的使用由《微型计算机控制技术》有关步进电机的使用可以知道:步进电机实际上是一个数字/角度转换器。
错齿是促使步进电机旋转的根本原因。
下面我们综合了解下步进电机的使用。
步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。
在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。
这一线性关系的存在,加上步进电机只有周期性的误差而无累积误差等特点。
使得在速度、位置等控制领域用步进电机来控制变的非常的简单。
虽然步进电机已被广泛地应用,但步进电机并不能象普通的直流电机,交流电机在常规下使用。
它必须由双环形脉冲信号、功率驱动电路等组成控制系统方可使用。
因此用好步进电机却非易事,它涉及到机械、电机、电子及计算机等许多专业知识。
目前,生产步进电机的厂家的确不少,但具有专业技术人员,能够自行开发,研制的厂家却非常少,大部分的厂家只一、二十人,连最基本的设备都没有。
仅仅处于一种盲目的仿制阶段。
这就给户在产品选型、使用中造成许多麻烦。
签于上述情况,我们决定以广泛的感应子式步进电机为例。
叙述其基本工作原理。
望能对广大用户在选型、使用、及整机改进时有所帮助。
二、感应子式步进电机工作原理(一)反应式步进电机原理由于反应式步进电机工作原理比较简单。
下面先叙述三相反应式步进电机原理。
1、结构:电机转子均匀分布着很多小齿,定子齿有三个励磁绕阻,其几何轴线依次分别与转子齿轴线错开。
0、1/3て、2/3て,(相邻两转子齿轴线间的距离为齿距以て表示),即A与齿1相对齐,B与齿2向右错开1/3て,C与齿3向右错开2/3て,A'与齿5相对齐,(A'就是A,齿5就是齿1)下面是定转子的展开图:图5-1 定转子的转开图2、旋转:如A相通电,B,C相不通电时,由于磁场作用,齿1与A对齐,(转子不受任何力以下均同)。
如B相通电,A,C相不通电时,齿2应与B对齐,此时转子向右移过1/3て,此时齿3与C偏移为1/3て,齿4与A偏移(て-1/3て)=2/3て。
如C相通电,A,B相不通电,齿3应与C对齐,此时转子又向右移过1/3て,此时齿4与A偏移为1/3て对齐。
如A相通电,B,C相不通电,齿4与A对齐,转子又向右移过1/3て这样经过A、B、C、A分别通电状态,齿4(即齿1前一齿)移到A相,电机转子向右转过一个齿距,如果不断地按A,B,C,A……通电,电机就每步(每脉冲)1/3て,向右旋转。
如按A,C,B,A……通电,电机就反转。
由此可见:电机的位置和速度由导电次数(脉冲数)和频率成一一对应关系。
而方向由导电顺序决定。
不过,出于对力矩、平稳、噪音及减少角度等方面考虑。
往往采用A-AB-B-BC-C-CA-A这种导电状态,这样将原来每步1/3て改变为1/6て。
甚至于通过二相电流不同的组合,使其1/3て变为1/12て,1/24て,这就是电机细分驱动的基本理论依据。
不难推出:电机定子上有m相励磁绕阻,其轴线分别与转子齿轴线偏移1/m,2/m……(m-1)/m,1。
并且导电按一定的相序电机就能正反转被控制——这是步进电机旋转的物理条件。
只要符合这一条件我们理论上可以制造任何相的步进电机,出于成本等多方面考虑,市场上一般以二、三、四、五相为多。
3、力矩:电机一旦通电,在定转子间将产生磁场(磁通量Ф)当转子与定子错开一定角度产生力F与(dФ/dθ)成正比。
图5-2 力矩其磁通量Ф=Br*S Br为磁密,S为导磁面积 F与L*D*Br成正比 L为铁芯有效长度,D为转子直径Br=N·I/RN·I为励磁绕阻安匝数(电流乘匝数)R为磁阻。
力矩=力*半径力矩与电机有效体积*安匝数*磁密成正比(只考虑线性状态)因此,电机有效体积越大,励磁安匝数越大,定转子间气隙越小,电机力矩越大,反之亦然。
(二)感应子式步进电机1、特点:感应子式步进电机与传统的反应式步进电机相比,结构上转子加有永磁体,以提供软磁材料的工作点,而定子激磁只需提供变化的磁场而不必提供磁材料工作点的耗能,因此该电机效率高,电流小,发热低。
因永磁体的存在,该电机具有较强的反电势,其自身阻尼作用比较好,使其在运转过程中比较平稳、噪音低、低频振动小。
感应子式步进电机某种程度上可以看作是低速同步电机。
一个四相电机可以作四相运行,也可以作二相运行。
(必须采用双极电压驱动),而反应式电机则不能如此。
例如:四相,八相运行(A-AB-B-BC-C-CD-D-DA-A)完全可以采用二相八拍运行方式.不难发现其条件为C= ,D= . 一个二相电机的内部绕组与四相电机完全一致,小功率电机一般直接接为二相,而功率大一点的电机,为了方便使用,灵活改变电机的动态特点,往往将其外部接线为八根引线(四相),这样使用时,既可以作四相电机使用,可以作二相电机绕组串联或并联使用。
图5-3 感应子式步进电机其中,曲线3电流最大、或电压最高;曲线1电流最小、或电压最低,曲线与负载的交点为负载的最大速度点。
要使平均电流大,尽可能提高驱动电压,使采用小电感大电流的电机。
第六章总结6.1总结短短的两周时间做完了本次综合课程设计,在做课程设计的时候自己学会了很多,特别是在PLC方面上,能知道设计过程中所要求的工艺步骤及相关要求。
两周的时间自己又重新学习了下PLC,对PLC又有了新的认识和理解。
特别是在编程方面自己也花费了很多时间去理解,深刻明白了编程的思维和思路,使自己受益匪浅。
我想这正是本次课程设计的目的。
当然在设计过程中也碰到过很多问题,也深刻体会理论知识和实践能力的差距。
这也是自己需要提高和学习的。
回顾起此次交流调速课程设计,从理论到实践,通过查阅大量有关资料,与同学交流经验和自学,并向老师请教等方式,使自己学到了很多有用的东西,这些将使我终身受益。
同时不仅可以巩固了以前所学过的知识,而且学到了很多在书本上所没有学到过的知识。
作课程设计期间,曾经遇到了许多的困难,但在同学、老师、亲人的帮助及自己的不断努力下得以一一解决,于此不断地增加了自己的知识,让我懂得怎样去学习。
谨在此向多年来给予我关心和帮助的老师、同学、朋友和家人表示衷心的感谢!感谢和我一起参加设计工作的同学们,是他们让我感受到了集体的力量,怎样才会让一个集体的合作更好,以及一起实践时给我帮助和支持;感谢学校开放实验室给我的设计以及学习所提供的帮助;感谢在我以前的学习中给我指导和支持的老师及师兄,没有他们的帮助就没有此次课程设计所取的成果,在此我衷心感谢他们,我会在以后的学习和工作中不断努力用实际行动来报答他们对我的苦心栽培!在这里也感谢我的指导老师肖老师的帮助和监督,让我在这次课程设计学到了很多。
在此表示由衷的谢意。
6.2参考文献(1)张万忠刘明芹主编,《电气与PLC控制技术》北京:化学工业出版社 2006(2)潘新民王燕芳编著,《微型计算机控制技术实用教程》北京:电子工业出版社 2007(3)肖清王忠锋编写,《西门子PLC课程设计指导书》(4)肖清王忠锋编写,《电器与PLC控制技术实验指导书》(5)张怀勇等翻译《西门子自动化系统实战S7和PCS7应用实例》北京:人民邮电出版社 2007 (6)张万忠等,《可编程控制器应用技术》北京:化学工业出版社 2002(7)黄净主编,《电气及PLC控制技术》北京:机械工业出版社 2002(8) 。