机器人关节的变换1点的旋转变换
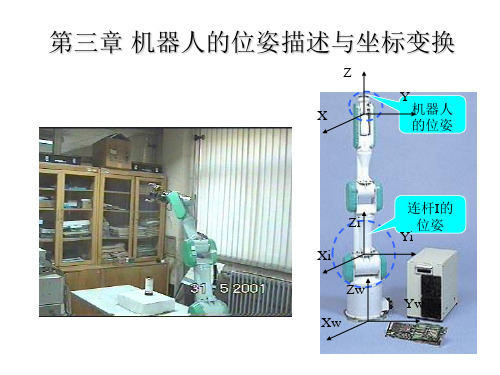
机器人的位姿描述与坐标变换

0
1
0
⎥ ⎥
⎢⎣− sinθ 0 cosθ ⎥⎦
Zi Zj
θ
θ Xi
Xj
Yi Y j
⎡cosθ − sinθ 0⎤
j i
R(Zi
,θ
)
=
⎢⎢sinθ
cosθ
0⎥⎥
⎢⎣ 0
0 1⎥⎦
Zi Zj
θ
Xi Xj
Yj
θ
Yi
⎡1 0
0⎤
j i
R(
X
i
,θ
)
=
⎢⎢0
cosθ
−
sinθ
⎥ ⎥
⎢⎣0 sinθ cosθ ⎥⎦
¥ ¥假设机器人的连杆和关节都是刚体¥ ¥
位置矢量
⎡x0 ⎤
P o '
o
=
⎢ ⎢
y0
⎥ ⎥
⎢⎣ z0 ⎥⎦
Z b Z'
O' Y' t n X' O
X Y
姿态矢量
O' O
R
=
[
O' O
X
OO'Y
⎡cos(∠X ' X )
O' O
Z
]3×3
=
⎢ ⎢
cos(∠X
'Y
)
⎢⎣cos(∠X ' Z )
单位主矢量
cos(∠Y ' X ) cos(∠Y 'Y ) cos(∠Z ' Z )
cos(∠Z ' X )⎤
cos(∠Z
'Y
)
⎥ ⎥
cos(∠Z ' Z ) ⎥⎦
姿态矩阵R的特点:
第四章(机器人学动力学)

第四章 机器人静力学和动力学
静力学和动力学分析,是机器人操作机设计和动态性能分 析的基础。特别是动力学分析,它还是机器人控制器设计、 动态仿真的基础。 机器人静力学研究机器人静止或缓慢运动式,作用在机器 人上的力和力矩问题。特别是当手端与环境接触时,各关节 力(矩)与接触力的关系。 机器人动力学研究机器人运动与关节驱动力(矩)间的动 态关系。描述这种动态关系的微分方程称为动力学模型。由 于机器人结构的复杂性,其动力学模型也常常很复杂,因此 很难实现基于机器人动力学模型的实时控制。然而高质量的 控制应当基于被控对象的动态特性,因此,如何合理简化机 器人动力学模型,使其适合于实时控制的要求,一直是机器 人动力学研究者追求的目标。 2
3
按静力学方法,把这些力、力矩简化到 Li 的固联坐标系 oi xi yi zi ,可得: Fi Fi 1 G i M i M i 1 r i F i 1 r Ci G i i 1 或 i i i 0
4.1 机器人静力学
一、杆件之间的静力传递 在操作机中,任取两连杆 Li, i 1 。设在杆 Li 1上的 Oi 1 点 L 作用有力矩 M i 1和力 F i 1;在杆 Li 上作用有自重力 G i 〔过质 r 心 Ci );i 和 rCi 分别为由 Oi 到 Oi 1 和 Ci 的向径。 M i 1 F i 1
18
4.4.4 牛顿——欧拉法基本运动方程
刚体的运动可分解为随质心的移动和绕质心的转动。借助于 杆件运动学知识,我们把达朗贝尔原理用于每个杆件,描述机 器人各杆件的运动。达朗贝尔原理可应用于任意瞬时,它实质 上是牛顿第二运动定律的一种变型,可表示为: d mi vi ( Fi ) Fi mi vi 牛顿定理 : dt d I ii Ni I ii i ( I ii ) 欧拉方程 : ( Ni ) dt 式中:mi — 杆i 质量; Fi — 杆i上所有外力合力; N i — 杆i上所有外力对质心的合力矩;
(优选)机器人位姿描述详解.

R
B
p
A B
R
B
p
A p C p A pCo
Ap
A B
R
B
p
A pBo
24
旋转部分 平移部分
三、齐次坐标和齐次变化
齐次坐标
a P b
c
直角坐标
x
P
y z
齐次坐标
非零的比例因子
a x
b y
c z
25
1)点的齐次坐标:
P x y z T
0
P 2 3 4 1T , P 4 6 8 2T
5
2、方位的描述
为了规定空间某刚体B的方位,设一坐标系{B}与此刚 体固连。用坐标系{B}的三个单位主矢量 , xB, y相B 对zB 于{A}的方向余弦组成的3x3矩阵来表示刚体B相对于 坐标系{A}的方位。
BAR AxB A yB AzB
r11 r12 r13
A B
R
r21
r22
r23
A p BAR B p cos( yA, xB )
cos( yA, yB )
cos(
yA
,
zB
)
pBy
18
cos(zA, xB ) cos(zA, yB ) cos(zA, zB ) pBz
绕一个坐标轴旋转的转动矩阵
ZA ZB
q q
XA
X
B
1)RX
YB YA
ZA ZB
ZA ZB
q
已知点P在B坐标系的坐标:
B P [x B y B zB ]T
求点P在A坐标系的坐标:
AP [x A y A zA ]T
15
ZB
ZA
任务1 工业机器人手动操作基础知识

5加载工业机器人工件
选择“导入模型库”,“设备”“training object”中的curving thing, 见图,添加后工件,如图所示。
工件离机器人较远,显示工业机器人的工作区域操作方法为: 鼠标右键单击布局中的“IRB120_3_58_01”,选择“显示机器人工 作区域”,其白色空间内为机器人可达区域,如图所示。
工件不在工业机器人的工作区域,需设置curving thing的位置, 其操作方法为:鼠标右键单击curving thing,选择设定位置,如图411所示。在弹出的对话框中设置其合适位置,设定完毕后,点击应 用,再点击关闭。
注意:设定位置时,以大地坐标为参考坐标,坐标原点在机身 底座的中心,xyz方向以图箭头所指示。至此一个最小的工业机器 人仿真系统建立完成,如图所示。
转化为手动模式后,点击左上角主菜单,如图所示
在弹出的如图所示的对话框中,点击“控制面板”。
在弹出的如图所示的对话框中,点击“语言”菜单, 从如图所示的界面中选择想要更改的语言
点击“确定”后,在弹出的“重启 FlexPendant”对话框中点击“是”,重启后生效。
1单轴运动
点击左上角主菜单,点击手动操纵,点击“Enable”,如图 4-35所示使使能器工作,变为绿色后机器人将处于电机开启 状态。
6.创建控制系统
在“基本”功能选项卡,单击“机器人系统”的“ 从布局”, 如图所示。
设定好系统名称和位置,注意路径建议不要出现中文,选 择RobotWare(如果安装有多个,选择对应的RobotWare版 本),单击“下一个”, 如图所示。
单击“选项”,如图所示。
在弹出如图所示的对 话框中,作以下修改:
“840-2 PROFIBUS Anybus Device”。
第3章 机器人位姿的数学描述与坐标变换

x=a(1-cos) , y=a(1-sinθ)
第3章 机器人位姿的数学描述与坐标变换
3.1 机器人位姿的数学描述
#假设机器人的连杆和关节都是刚体 (1)首先,建立一个参考坐标系; (2)然后,在刚体上任意建立一个刚体坐标系。
Z Z'
O' Y'
O
X'
X Y
第3章 机器人位姿的数学描述与坐标变换
刚体位置:
,
)
=
?
j i
R(,q
,
)
=
R(Z
,
)
R(Y
,q
)R(Z
,
)
绕动坐标轴依次转动时,每 个旋转矩阵要从左往右乘。
Z2
Zj
Zi (Z1)
q
q
Yj
(Y2 )
q Y1
Yi
Xi
X1 X2 X j
第3章 机器人位姿的数学描述与坐标变换
cos − sin 0 cosq 0 sinq cos − sin 0
R(Z
i
,q
)
=
s
inq
cosq
0
0
0 1
Zi Zj
q Xi
Xj
Yj q
Yi
第3章 机器人位姿的数学描述与坐标变换
1 0
0
j i
R(
X
i
,q
)
=
0
cosq
−
s in q
0 sinq cosq
cosq 0 sinq
j i
R(Yi
,q
)
=
0
1
0
− sinq 0 cosq
3机器人的位姿描述与坐标变换
假设:
整理得:
旋转变换通式
讨论:
(1)
(2)
(3)
例:坐标系B原来与A重合,将坐标系B绕过原点O的轴线
转动
,求旋转矩阵
解答:
1)
2)
3)带入旋转通式得:
2、等效转轴与等效转角
转轴和转角
旋转矩阵
1
2?
1)将方程两边矩阵的主对角线元素分别相加,则
2)将方程两边矩阵的非对角线元素成对相减得:
►绕多个坐标轴旋转的转动矩阵
1)、绕固定坐标系旋转
2)、绕运动坐标系旋转
ZYZ欧拉角
注意:多个旋转矩阵连乘时,次序不同则含义不同。1)绕新的动坐标轴依次转动时,每个旋转矩阵要从左往右乘,即旋转矩阵的相乘顺序与转动次序相同;2)绕旧的固定坐标轴依次转动时,每个旋转矩阵要从右往左乘,即旋转矩阵的相乘顺序与转动次序相反。
解:
1)
2)
Z
i
X
i
Y
i
P
坐标系j由坐标系i旋转而成
求点P在i坐标系的坐标:
已知点P在j坐标系的坐标:
P
☺
►姿态矢量矩阵
坐标系j相对于i的方位
旋转矩阵的性质:
旋转矩阵
►绕一个坐标轴旋转的转动矩阵
1)RX
2)RY
3)RZ
转动矩阵的特点:(1) 主对角线上有一个元素为1,其余均为转角的余弦/正弦;(2) 绕轴转动的次序与元素1所在的行、列号对应;(3) 元素1所在的行、列,其它元素均为0;(4) 从元素1所在行起,自上而下,先出现的正弦为负,后出现的为正,反之依然。
2、变换矩阵T的相乘 ★矩阵相乘的顺序一般不可换,特殊可换的情况为变换都是同参考系下的平移或绕同一坐标轴的旋转。
第03章 机器人的运动学和动力学

教案首页课程名称农业机器人任课教师李玉柱第3章机器人运动学和动力学计划学时 3教学目的和要求:1.概述,齐次坐标与动系位姿矩阵,了解平移和旋转的齐次变换;2.机器人的运动学方程的建立与求解*;3.机器人的动力学*重点:1.机器人操作机运动学方程的建立及求解;2.工业机器人运动学方程3.机器人动力学难点:1. 机器人动力学方程及雅可比矩阵基本原理思考题:1.简述齐次坐标与动系位姿矩阵基本原理。
2.连杆参数及连杆坐标系如何建立?3.机器人动力学方程及雅可比矩阵基本原理是什么?第3章机器人运动学和动力学教学主要内容:3.2 齐次坐标与动系位姿矩阵3.3 齐次变换3.4 机器操作机运动学方程的建立与求解3.5 机器人运动学方程3.6 机器人动力学本章将主要讨论机器人运动学和动力学基本问题。
先后引入了齐次坐标与动系位姿矩阵、齐次变换,通过对机器人的位姿分析,介绍了机器人运动学方程;在此基础上有对机器人运动学方程进行了较为深入的探讨。
3.1 概述机器人,尤其是关节型机器人最有代表性。
关节型机器人实质上是由一系列关节连接而成的空间连杆开式链机构,要研究关节型机器人,必须对运动学和动力学知识有一个基本的了解。
分析机器人连杆的位置和姿态与关节角之间的关系,理论称为运动学,而研究机器人运动和受力之间的关系的理论则是动力学。
3.2 齐次坐标与动系位姿矩阵3.2.1 点的位置描述在关节型机器人的位姿控制中,首先要精确描述各连杆的位置。
为此,先定义一个固定的坐标系,其原点为机器人处于初始状态的正下方地面上的那个点,如图3-1(a)所示。
记该坐标系为世界坐标系。
在选定的直角坐标系{A}中,空间任一点P的位置可以用3×1的位置向量A P表示,其左上标表示选定的坐标系{A},此时有A P=XYZ P P P ⎡⎤⎢⎥⎢⎥⎢⎥⎣⎦式中:P X、P Y、P Z—点P在坐标系{A}中的三个位置坐标分量,如图3-1(b)。
3.2.2 齐次坐标将一个n维空间的点用n+1维坐标表示,则该n+1维坐标即为n维坐标的齐次坐标....。
机器人学--坐标转换

1
p px py pz T ,n nx ny nz T ,o ox oy oz T ,a ax ay az T
Robotics 数学基础
2.4 物体的变换 及逆变换
3.变换方程初步 {B}:基坐标系 {T}:工具坐标系 {S}:工作台坐标系 {G}:目标坐标系
或工件坐标系 满足方程
A P
1
A B
R
0
A
PB 1
0
B P
1
P点在{A}和{B}中的位置矢量分别增广为:
(2-14)
AP Ax A y Az 1T ,BP Bx B y Bz 1T
而齐次变换公式和变换矩阵变为:
A P ABTB P,
ABT
A B
R
0
A
PB0 1
(2-15,16)
Robotics 数学基础
ny
oy
ay
0
fx
f
yvers
f z s
fy fyvers c
fz fyvers fxs 0
nz 0
oz 0
az 0
0 1
fx
f z v ers 0
f y s
fy fzvers fxs 0
fz fzvers c 0
0 1
将上式对角线元素相加,并简化得
nx
oy
az
(
f
2 x
f
2 y
f
2023最新整理收集 do
something
机器人技术数学基础
Mathematic Preparation for Robotics
2.1 位置和姿态的表示 2.2 坐标变换 2.3 齐次坐标变换 2.4 物体的变换及逆变换 2.5 通用旋转变换
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
工业机器人手的变换
手链接到小臂,小臂链接到大臂,大臂链 接到底盘。
Px’ =L1- Px’ =L1-L2 = Px·COSθ- Py·SINθ Px·COSθ- Py· Py’ Py’ =L3+L4 = Px·SINθ+ Py·COSθ Px· Py·
ห้องสมุดไป่ตู้
方程过于繁琐,可 用矩阵的方式表示:
2点的平移变换
可以用一种统一的矩阵,简洁的同时表示 旋转与平移变换:
3矩阵的组合变换
机器人关节的变换 1点的旋转变换
假设有一点在参考坐标系no 中的坐标为Px, 假设有一点在参考坐标系noa中的坐标为Px, Py,当参考坐标系逆时针旋转时,P Py,当参考坐标系逆时针旋转时,P点也一 起旋转,旋转后P点在xoy坐标系中新的坐 起旋转,旋转后P点在xoy坐标系中新的坐 标为Px’ Py’ 标为Px’,Py’. 可以证明新坐标位置为: