基于LabVIEW的机器视觉实验系统开发
基于LabVIEW的视觉检测控制系统研究
0 引言
随着计算机、图 像 处 理 等 技 术 的 迅 速 发 展,机 器 视觉的应用越来越广泛。工业机器人通过视觉获取 图像 信 息,实 时 地 提 取 出 工 件 特 征 参 数,并 判 断 出 工 件所处的位置及状态,是机器视觉应用于工业领域的 关键技术之一。
本文基于 LabVIEW 软件对 LED( 发光二极管) 球 灯泡生 产 设 备 的 视 觉 控 制 系 统 进 行 了 研 究。IMAQ Vision 是基于 LabVIEW 平台进行图像处理应用开发 的软件包,它以 LabVIEW VI 库的形式给出,可以完成 图像的采集和各种图像分析处理工作。该语言直观 的表现形式、众多的 VI 节点简化了编程过程,而且通 过它可设计出美观的控制界面[1]。
由于光电转换过程中 CCD 芯片灵敏度的不均匀 性,数 字 化 过 程 中 的 量 化 噪 声、传 输 过 程 中 的 误 差 以 及照明光线等因素,实际获得的图像在形成、传输、接 收和处理过程中,图像质量会变差,清晰度下降,这时 就 需 要 对 原 始 图 像 进 行 预 处 理,使 得 图 像 更 加 清 晰, 110
基于LabVIEW的机器视觉系统开发与应用
模 块 结 合 起来
,
并把对机 器人轴卡 的设置集 成到
下 实 现 了没 有 专 门 的 高 速
, , ,
环境
芯片的机器视觉系
统 解 决 了 机 器 视 觉 系 统对 硬 件 的依赖 性 缩 短 了 软
件 的开 发 周 期 可 用 于 胶 囊 封 装 丢 粒 的 检 测 即 使 是
在 照 明 状 况 有变 化 指 均 匀 变 化
,
注 意 的 是 参数 选 项 要 保证 线 程 的 安 全 性 最 后 要 设 置 好 抓 图 的 数 据通 道 以 及 缓 冲 区
包 括 两 个 主 要 过程 图 像 分 割 和 图 像 分 类 冈 首 先 利 用 直 方 图选 区 阂 值 进行 边 缘 提 取 通 常 是 选 用 两 峰
, ,
,
有专 门的
,
或 高速 沼
、
芯 片 为核 心 需要 设计
,
、
,
的视 觉 功 能 可 用 于 胶囊 的 封装 质量 检 查 啤酒 的 灌 装 质 量 等方 面 的 检 测
、
专 门的 电路 用 汇编 或
些 问 题 本 文采 用 美 国
,
语言等编 程 因此 使得 整 公 司 开发 的
,
个 系 统 的 开 发工 作 量 大 周 期 长 成 本 高 为 解 决 这
立起来 的相 应 子
叹
节点所在 的
,
份 结构 中的相应 帧 并抓取 目
,
等 结构将所 需 的子
连 接起 来 就 可 以 完 成 图 像 处
标 实 现 机 器 视 觉 特 征模 板 识 别 程 序 如 图
系 统 识别 检 测 界 面 如 图
所示
LabVIEW在工业机器视觉系统中的应用实现高精度的视觉检测

LabVIEW在工业机器视觉系统中的应用实现高精度的视觉检测工业机器视觉是一种广泛应用于生产线的技术,它通过图像采集、处理和分析,实现对产品质量的检测和控制。
LabVIEW作为一种基于图形化编程的软件平台,为工业机器视觉系统的开发和应用提供了强大的支持。
本文将介绍LabVIEW在工业机器视觉系统中的应用,以实现高精度的视觉检测。
一、LabVIEW简介LabVIEW(Laboratory Virtual Instrument Engineering Workbench)是一种由美国国家仪器公司(National Instruments)开发的基于图形编程的软件平台。
它允许工程师通过可视化编程的方式,以图形化的方法构建应用程序。
LabVIEW提供了丰富的工具和功能,能够处理各种数据类型、采集和分析实验数据,同时也支持各种硬件设备的控制和监测。
二、工业机器视觉系统概述工业机器视觉系统是利用摄像机进行图像采集,然后通过图像处理和分析,实现对产品质量的检测和控制。
它可以应用于自动化生产线中的各个环节,包括产品外观检测、尺寸测量、缺陷检测等。
工业机器视觉系统通常由硬件设备、图像采集卡、图像处理软件和人机界面组成。
三、LabVIEW在工业机器视觉系统中的应用1. 图像采集与处理LabVIEW提供了丰富的图像采集与处理工具,可以方便地获取和处理图像数据。
通过连接相机和采集卡,LabVIEW可以实时地获取图像,并进行预处理,如图像平滑、滤波、增强等。
LabVIEW还支持多种图像格式,可以方便地读取和保存图像文件。
2. 特征提取与分析在工业机器视觉系统中,对产品特征的提取和分析是非常关键的。
LabVIEW提供了强大的图像处理工具箱,可以实现各种特征的提取和分析。
例如,可以通过边缘检测算法提取产品的边缘信息,通过直线和圆检测算法获取产品的几何特征。
此外,LabVIEW还支持模式匹配和目标识别等高级的图像处理算法,可以根据特定的检测目标进行精确的识别和判断。
基于LabVIEW的机器视觉实验系统开发
基于LabVIEW的机器视觉实验系统开发针对精密测控技术与仪器实验室的虚拟仪器实践平台,对其嵌入式测控系统的图像处理功能进行再开发。
为虚拟仪器课程设计提供技术支持,开发一套集表现性、可欣赏性、实用性和应用性与一体的视觉平台。
针对以上要求,本平台以电子芯片表面为处理对像,以图像处理的手段实现不同芯片的识别功能,平台的实现具体应包括以下几个部分:1)硬件平台搭建,包括摄像头、CCD、图像采集卡等。
2)软件平台搭建,包括:a)图像处理程序,包括视觉系统基本功能模块的搭建;b)平台交互界面,在Labview环境下调用所采集图像与图像处理的功能模块,完成对图像的处理等功能。
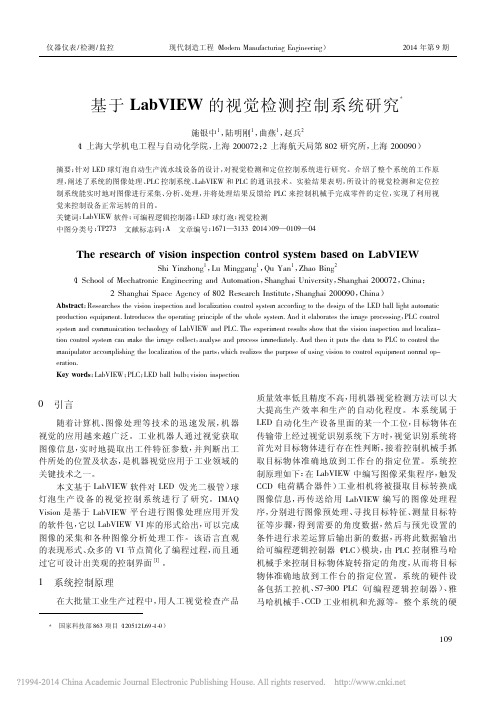
1系统介绍图1 机器视觉实验平台流程该系统主要由图像获取和图像处理平台组成,系统流程如图1所示。
1.1硬件平台的搭建硬件部分主要包括成像CCD及摄像头、图像采集卡、数据传输线和计算机等,其实物如图2所示。
图2 机器视觉系统硬件1.1.1 相机(成像CCD 和摄像头)的选择本系统是一个视觉系统的演示平台,以电子芯片表面为处理对象,为了应用在更多其它对象上,所以假定视觉范围为100×100mm2,对于芯片表面的字符要求能检测出0.2mm 大小的线条或瑕疵。
根据以上条件,可以将0.2mm 假定为理论像素值。
也就是说,只要像素值能达到0.2mm ,就可以满足测量精度方面要求。
根据上面计算相机X 方向或Y 方向的分辨率公式为:100(X/Y 方向视野范围)÷0.2(X/Y 方向理论像素值)=200(X/Y 方向分辨率)可知,只要相机的分辨率高于200×200,就是适合此系统的相机。
通过调查市场现有相机参数,同时考虑到成本,本系统的相机CCD 采用奥尼克斯的MBC-5050,其主要参数为:成像器件:1/3英寸CCD信号系统:CCIR 黑白制式有效像素:500×582水平分辨率:420电视线最小照度:0.03Lux信噪比:≧48dB功率:3.5W摄像头采用厂家的computar配套摄像头,CCD及摄像头实物如图3所示。
LabVIEW与机器人视觉实现智能机器人的感知与控制

LabVIEW与机器人视觉实现智能机器人的感知与控制实现智能机器人的感知与控制是当前科学技术领域研究的热点之一。
在这一领域中,LabVIEW与机器人视觉技术被广泛应用,为智能机器人的感知与控制提供了强大的支持。
本文将就LabVIEW与机器人视觉实现智能机器人的感知与控制进行详细介绍。
一、LabVIEW与机器人视觉技术的基本原理LabVIEW,全称是Laboratory Virtual Instrument Engineering Workbench(实验室虚拟仪器工程化平台),是一种高度可扩展的系统设计软件,可以用于测量与控制、自动化测试和监视等领域。
而机器人视觉技术,是指利用机器视觉对机器人进行环境感知、目标识别和位置定位等操作的技术。
LabVIEW与机器人视觉技术的结合,可以实现智能机器人的感知与控制。
LabVIEW作为一个强大的开发平台,提供了丰富的功能库和开发工具,可以方便地进行图像处理和控制算法的开发与调试。
而机器人视觉技术则借助图像采集装置(如摄像头)获取周围环境的图像信息,并通过图像处理算法实现对图像的解析和分析,从而实现对环境和目标的感知。
LabVIEW通过其可视化的编程环境与机器人视觉技术的结合,不仅使得开发过程更加简便高效,还提高了机器人感知与控制的准确性和稳定性。
二、LabVIEW与机器人视觉实现智能机器人的感知智能机器人的感知主要包括环境感知和目标感知两个方面。
环境感知是指机器人对周围环境的感知和识别,目标感知是指机器人对周围目标的感知和识别。
LabVIEW与机器人视觉技术的结合,可以实现智能机器人的感知功能。
1. 环境感知环境感知是指机器人对周围环境的感知和识别。
通过使用LabVIEW搭建的图像处理算法,机器人视觉系统可以对环境中的物体进行分析和识别,并将感知到的环境信息传递给控制系统。
例如,机器人可以通过摄像头获取环境中的图像信息,然后使用LabVIEW进行图像处理,识别出环境中的墙壁、障碍物等,并基于这些信息来规划自己的移动路径。
利用LabVIEW进行机器视觉系统开发
利用LabVIEW进行机器视觉系统开发近年来,机器视觉系统在工业领域得到了越来越广泛的应用。
它利用摄像头和计算机视觉算法,实现对图像和视频的处理与分析,从而对产品质量进行自动判定、生产过程进行监控等。
在机器视觉系统的开发过程中,LabVIEW作为一款强大的开发平台,能够提供图形化的编程环境和丰富的工具包,极大地简化了开发过程。
本文将介绍如何利用LabVIEW进行机器视觉系统的开发。
一、LabVIEW介绍LabVIEW(Laboratory Virtual Instrument Engineering Workbench)是由美国国家仪器公司(NI)开发的一种图形化编程环境。
它采用G语言进行编程,通过连接各种传感器、仪器和执行器,实现自动化控制和数据采集。
LabVIEW具有直观易用的特点,不需要编写传统的代码,而是通过将各种“虚拟仪器”拖拽到界面上并进行连接,即可实现复杂的控制和数据处理操作。
二、LabVIEW在机器视觉系统中的应用1. 图像采集机器视觉系统首先需要进行图像的采集,在LabVIEW中,可以通过连接摄像头来获取实时图像。
LabVIEW支持多种摄像头的驱动程序,只需简单配置即可实现图像的采集并显示在界面上。
2. 图像处理图像处理是机器视觉系统的核心,LabVIEW内置了丰富的图像处理工具包,可以进行滤波、边缘检测、形态学操作等常用的图像处理算法。
开发人员可以根据具体需求选择适当的处理方法,并直观地配置参数,实时查看处理效果。
3. 特征提取在机器视觉系统中,常常需要提取目标的特征以进行识别和分类。
LabVIEW提供了多种特征提取工具,如灰度共生矩阵(GLCM)、方向梯度直方图(HOG)等。
这些工具可以自动计算出图像的各类特征,并在界面上展示提取结果,方便开发人员进行后续处理。
4. 目标检测和识别LabVIEW提供了多种目标检测和识别算法,如背景建模、模板匹配、支持向量机(SVM)等。
开发人员可以根据具体场景选择合适的算法,并通过图形化界面进行参数设置和算法调优。
LabVIEW与机器视觉实现自动视觉检测
LabVIEW与机器视觉实现自动视觉检测自动视觉检测是一种利用计算机技术和机器视觉系统进行自动检测与识别的技术。
在现代制造业中,自动视觉检测已经成为提高生产效率和产品质量的重要手段。
LabVIEW作为一种强大的图形化编程语言,与机器视觉系统相结合,能够实现高效准确的自动视觉检测。
一、LabVIEW简介LabVIEW是National Instruments(NI)公司开发的一种图形化编程语言和开发环境。
它以图形化的方式呈现编程逻辑,开发者只需拖拽、连接不同的函数模块,即可实现复杂的控制和测量应用。
LabVIEW具有易上手、灵活、高效等特点,因此在工程领域得到广泛应用。
二、机器视觉技术机器视觉技术是一种模拟人眼实现对图像的感知和分析的技术。
它通过摄像头或相机获取图像,利用计算机对图像进行分析处理,实现图像识别、检测和测量等功能。
机器视觉技术已经广泛应用于工业自动化、医疗诊断、智能交通等领域。
三、LabVIEW与机器视觉的结合LabVIEW提供了丰富的图像处理函数库和模块,可以直接用于机器视觉系统的开发。
开发者可以利用LabVIEW进行图像采集、预处理、特征提取、目标检测和分析等操作,从而实现自动视觉检测。
1. 图像采集LabVIEW可以通过连接相机和摄像头实现图像的实时采集。
它支持多种图像采集设备,如数码相机、线阵扫描相机和工业相机等。
LabVIEW还允许用户自定义图像采集接口,以适应不同的硬件设备。
2. 图像预处理通过图像预处理,可以提高后续图像处理的准确性和效率。
LabVIEW提供了丰富的图像滤波、增强、几何变换等函数模块,可以用于去噪、增强、纠正图像畸变等操作。
开发者可以根据实际需求,选择适当的预处理算法,并将其与机器视觉系统集成。
3. 特征提取特征提取是机器视觉检测的关键环节。
LabVIEW提供了多种特征提取函数和算法,如边缘检测、角点检测、轮廓提取等。
通过提取图像的特征,开发者可以获取物体的形状、纹理、颜色等信息,从而实现对图像的解析和识别。
使用LabVIEW进行机器视觉应用开发
使用LabVIEW进行机器视觉应用开发机器视觉是一门涉及从图像和视频中获取、处理和分析信息的领域。
通过将机器视觉与LabVIEW这一强大的编程环境相结合,我们可以轻松地开发出各种应用,如图像处理、目标检测、物体识别等。
本文将介绍如何使用LabVIEW进行机器视觉应用开发。
一、LabVIEW简介及环境搭建LabVIEW是一种图形化编程语言,它采用数据流编程模型,使用图形化的块图形式进行程序设计。
在开始开发机器视觉应用之前,我们首先需要安装LabVIEW软件并搭建相应的环境。
1.1 软件安装LabVIEW可以从官方网站下载并安装,根据操作系统选择合适的版本进行安装。
安装完成后,我们可以启动LabVIEW并创建一个新的项目。
1.2 硬件准备在进行机器视觉应用开发之前,我们需要准备相关的硬件设备,如相机、图像采集卡等。
这些设备将帮助我们获取图像或视频数据,作为机器视觉应用的输入。
二、LabVIEW图形化编程基础在开始编写机器视觉应用之前,我们需要了解LabVIEW的图形化编程基础。
LabVIEW的图形化编程主要由前面板和块图两部分组成。
2.1 前面板在LabVIEW中,前面板类似于应用程序的用户界面,我们可以在前面板上添加控件来与用户交互。
对于机器视觉应用来说,我们可以添加图像显示控件、按钮控件等,以便用户观看图像并控制应用的运行。
2.2 块图块图是LabVIEW中程序的核心部分,我们可以在块图中添加、连接和配置各种功能模块。
对于机器视觉应用来说,我们可以添加图像获取模块、图像处理模块、识别算法模块等,以实现对图像数据的处理和分析。
三、机器视觉应用开发实例下面我们以一个简单的机器视觉应用开发实例来介绍LabVIEW的使用方法。
3.1 目标检测应用假设我们需要开发一个目标检测应用,用于在一幅图像中检测指定的物体。
首先,我们需要在前面板上添加一个图像显示控件,用于显示输入图像和检测结果。
然后,我们可以添加一个图像获取模块,以获取来自摄像头的图像数据。
基于labVIEW的机器视觉检测系统的研究
基于labVIEW的机器视觉检测系统的研究宫二栋;丁蕴丰【期刊名称】《长春理工大学学报(自然科学版)》【年(卷),期】2017(040)002【摘要】分析了当前机器视觉检测技术在国内外研究及工业中的应用状况,阐述了机器视觉和虚拟仪器技术各自的特点,研究两者互相结合的实用性,设计出视觉检测系统平台.选择National Instruments公司开发的LabVIEW程序和工业相机作为软硬件开发环境,调用视觉开发模块IMAQ Vision丰富的专业化控件和函数库,设计可检验汽车钣金件产品检测平台.视觉检测系统可实现对汽车板件的快速检测,同时保证了切割的精确度.%In this paper, the studies and applications of machine vision inspection technolo gy were analyzed in China and abroad,and the characteristics of both machine vision and virtual instrumentation were explained. Then,by combin-ing these two technologies, a new visual inspection system/platform was designed. Based on the LabVIEW develop-ment environment and industrial cameras from National Instruments and LabVIEW's IMAQ Vision (a library of con-trols and functions),an inspection platform for automobile sheet metal parts was developed. This visual inspection sys-tem was able to inspect automobile plates rapidly while ensuring the accuracy of cutting.【总页数】4页(P75-77,81)【作者】宫二栋;丁蕴丰【作者单位】长春理工大学机电工程学院,长春 130022;长春理工大学机电工程学院,长春 130022【正文语种】中文【中图分类】TP391.4【相关文献】1.基于LabVIEW的胶带撕裂机器视觉检测系统研究 [J], 祁隽燕;闫海峰;谭超;张燕杰2.基于LabVIEW的网络机器视觉检测系统 [J], 李培江;李淑清;高华;尤婷;吕梅蕾3.基于机器视觉和Labview的磁环在线自动检测系统 [J], 徐燕;卢炎麟;侯伟4.基于LabVIEW机器视觉在继电器检测系统中的应用研究 [J], 刘超;石锦成;刘林琳;刘蜜;丁成波5.基于Labview机器视觉的SIM卡槽缺陷检测系统研究 [J], 郑中华;施鑫铭;刘伟斌;熊建辉;鄢仁辉因版权原因,仅展示原文概要,查看原文内容请购买。
labview机器视觉开发软件关系图
labview机器视觉开发软件关系图
Vision Development Module
Vision Builder for Automated Inspection (AI)Vision Acquisition Software ⽤于创建,验证和部署整个机器视觉应⽤的可配置开发环境。
Vision Builder AI 不需要编程NI Vision
NI Vision Assistant
⽤于LabVIEW ,CVI 和其他图像处理及分析环境的视觉算法库
能⾃动⽣成现成的LabVIEW 框图模块提供实现图像处理和分析的功能
⽤于捕获图像的⼀系列驱动程序NI-IMAQ 提供对图像采集硬件和C ,Visual Basic 以及LabVIEW 中⽤于图像采集的API ⽀持的驱动级软件NI-IMAQdx NI-IMAQdx 引⼊⼀种新的,尽管相似的,⽤于从IEEE 1394和GigE 视觉相机中采集图像的AP I 推荐使⽤NI-IMAQ I/O
允许您与带有FPGA 的NI-IMAQ I/O 设备,如CVS ,PCI-8254R
和PCIe-8255R ,上的数字I/O 线交互。
其它⼀套驱动及从NI 图像采集设备或IEEE 1394(⽕线)相机获取,显⽰和存储图像的应⽤。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于LabVIEW的机器视觉实验系统开发
针对精密测控技术与仪器实验室的虚拟仪器实践平台,对其嵌入式测控系统的图像处理功能进行再开发。
为虚拟仪器课程设计提供技术支持,开发一套集表现性、可欣赏性、实用性和应用性与一体的视觉平台。
针对以上要求,本平台以电子芯片表面为处理对像,以图像处理的手段实现不同芯片的识别功能,平台的实现具体应包括以下几个部分:
1)硬件平台搭建,包括摄像头、CCD、图像采集卡等。
2)软件平台搭建,包括:
a)图像处理程序,包括视觉系统基本功能模块的搭建;
b)平台交互界面,在Labview环境下调用所采集图像与图像处理的功
能模块,完成对图像的处理等功能。
1系统介绍
图1 机器视觉实验平台流程
该系统主要由图像获取和图像处理平台组成,系统流程如图1所示。
1.1硬件平台的搭建
硬件部分主要包括成像CCD及摄像头、图像采集卡、数据传输线和计算机
等,其实物如图2所示。
图2 机器视觉系统硬件
1.1.1 相机(成像CCD 和摄像头)的选择
本系统是一个视觉系统的演示平台,以电子芯片表面为处理对象,为了应用在更多其它对象上,所以假定视觉范围为100×100mm2,对于芯片表面的字符要求能检测出0.2mm 大小的线条或瑕疵。
根据以上条件,可以将0.2mm 假定为理论像素值。
也就是说,只要像素值能达到0.2mm ,就可以满足测量精度方面要求。
根据上面计算相机X 方向或Y 方向的分辨率公式为:
100(X/Y 方向视野范围)÷0.2(X/Y 方向理论像素值)=200(X/Y 方向分辨率)
可知,只要相机的分辨率高于200×200,就是适合此系统的相机。
通过调查市场现有相机参数,同时考虑到成本,本系统的相机CCD 采用奥尼克斯的MBC-5050,其主要参数为:
成像器件:1/3英寸CCD
信号系统:CCIR 黑白制式
有效像素:500×582
水平分辨率:420电视线
最小照度:0.03Lux
信噪比:≧48dB
功率:3.5W
摄像头采用厂家的computar配套摄像头,CCD及摄像头实物如图3所示。
图3 MBC-5050成像CCD及配套摄像头
1.1.2图像采集卡的选择
图像采集卡采用Ni的PXI-1409,如图4所示。
该卡最多可以支持4个标准(RS-170,CCIR)或非标准相机,可进行高分辨率测量级图像采集和科学图像开发。
选择采集卡时,要考虑和所选相机的是否匹配。
其它设备有计算机、电源、摄像头支架等。
图4 PXI-1409图像采集卡
1.2软件平台的搭建
软件平台主要完成从硬件获取图像、处理原始图像、显示处理结果等功能。
软件平台使用LabVIEW 7.1、IMAQ Vision 8.0(试用版)等软件进行系统开发。
LabVIEW特有的数据流式编程和IMAQ Vision 强大的图像处理能力极大地缩短了系统的开发周期、降低了成本。
系统软件的交互界面如图5所示。
图5 机器视觉实验平台交互界面
1.2.1图像获取
该部分主要用来获取原始图像以进行后面的图像处理,labview中既可以方便地对现有图像进行处理,也可以从硬件设备(照相机)获取图像进行实时处理。
本软件中同时提供了这两种图像获取方式,如图6所示。
图6 选择原始图像来源
图7为从硬件获取图像并将其显示的labview代码。
图7 从相机获取图像程序代码
1.2.2图像几何变换
该部分主要是对原始图像进行镜像、缩放、旋转等几何变换,图8 是对原始图像进行旋转变换的效果图。
图8 图像旋转变换
在对一些诸如环形条形码识别的图像处理中,需要将环状的图像转换为矩形,该软件中的“曲边拉直”提供了这样的功能,使用时需要先设定环形的中心坐标、内外半径以及参与变换的起始角度,就能得到变换结果,图9中将一个简单的环形文字变换为易识别易处理得线条状。
图9 将环形图像变换为矩形图像
1.2.3图像点处理
这部分是各种图像处理中经常用到的预处理功能,主要包括图像反色、阈值变换等。
在阈值变换中,提供了两种选取阈值的方法,一种是直接输入阈值,另一种是基于迭代法的阈值计算。
该方法是先根据经验改定一个阈值T1,然后对图像中小于T1与大于T1的像素点进行统计,从而得到另一个阈值T2,具体计算公式如下:
∑∑∑∑+=+===⋅+⋅=2551255100
21111T i i
T i i
T i i T i i n i n n
i n T 其中,ni 为图像中阈值为i 的像素点个数。
用上面的公式得到阈值T 2 后,付给T 1,代回公式继续进行迭代,直到最后的T 2=T 1。
利用该公式对图8中原始图像进行图像二值化,得到的结果如图10所示,其中初始阈值为127,计算阈值为185,图10右图为左图的反色变换。
图10 图像阈值变换与反色变换 上面的公式也有可能不收敛,因此使用该方法进行计算时有可能得不到正确的阈值,但对于直方图形如图11所示的图像,其特征是背景色与物体的像素值相差较大,且两者之间有明显的低谷,对于这样的图像,上面的公式是有效的。
图11 图8中原始图像的直方图
1.2.4 图像滤波
这部分主要实现图像的各种滤波功能,在图像处理中,
可以根据检测对象的
特征选择适当的滤波类型,从而提取出感兴趣的图像特征。
图12显示了对二值化图像进行轮廓提取得到的效果。
图12 对二值化图像进行轮廓提取
1.2.5数学形态学变换
数学形态学是科学家在研究岩石结构时建立的一门学科。
形态学的用途主要是获取物体拓扑和结构信息,它通过物体和结构元素相互作用的某些运算,得到物体更本质的形态。
在图象处理中的应用主要是:(1)利用形态学的基本运算,对图象进行观察和处理,从而达到改善图象质量的目的;(2)描述和定义图象的各种几何参数和特征,如面积、周长、连通度、颗粒度、骨架和方向性等。
图13是几种常用数学形态学变换的效果。
(a) 原始图像
(b) 腐蚀(c) 膨胀
(d) 开运算(e) 闭运算
图13 数学形态学变幻
1.2.6图像信息查看
在图像处理的过程中,有时需要了解图像的灰度分布和某些关键点附近的像素信息,该软件中的图像信息查看就是为这样的目的设计的。
在处理过程中,可以随时查看当前图像的灰度直方图,如图11所示。
同时,也可以在当前图像中点击感兴趣的位置,查看该点相邻的7×7矩阵范围内像素点的灰度值,如图14所示。
图14 显示图像中某点附近像素点的灰度值
1.2.7自定义功能
前面的模块都是在图像处理任务中经常用到的,但对于某一个特定的检测对象和检测任务,在基本处理的基础上,还需要某些特定的处理功能,这些功能往往要根据不同的需要自己动手来进行开发。
自定义功能模块对应的就是这样的功能。
2结束语
该平台使用方便,可直接在上面设计自己的图像处理方案,并直接验证其结果。
使用者可以在基本功能的基础上,开发出专门的图像处理、图像检测工具。
该平台既可以作为图像处理入门的示例教程,也可以作为虚拟仪器及Labview学习的教程使用。