动目标检测器(MTD)
雷达系统中的信号处理技术
雷达系统中的信号处理技术摘要本文介绍了雷达系统及雷达系统信号处理的主要内容,着重介绍与分析了雷达系统信号处理的正交采样、脉冲压缩、MTD和恒虚警检测几种现代雷达技术,雷达系统通过脉冲压缩解决解决雷达作用距离和距离分辨力之间的矛盾,通过MTD来探测动目标,通过恒虚警〔CFAR〕来实现整个系统对目标的检测。
关键词雷达系统正交采样脉冲压缩MTD 恒虚警检测1雷达系统概述雷达是Radar〔Radio Detection And Ranging〕的音译词,意为“无线电检测和测距”,即利用无线电波来检测目标并测定目标的位置,这也是雷达设备在最初阶段的功能。
雷达的任务就是测量目标的距离、方位和仰角,还包括目标的速度,以及从目标回波中获取更多有关目标的信息。
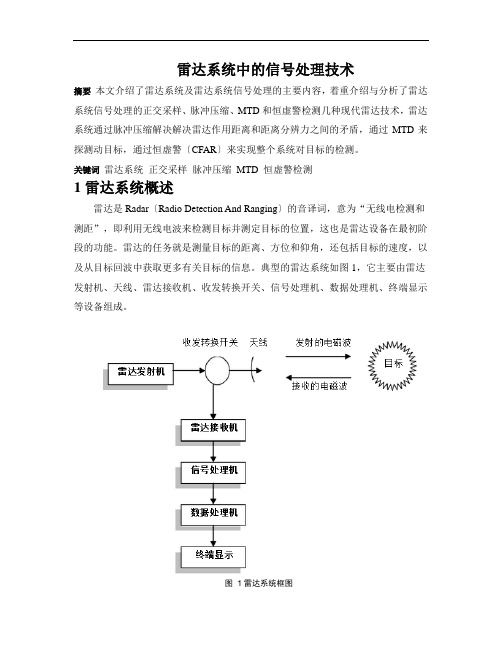
典型的雷达系统如图1,它主要由雷达发射机、天线、雷达接收机、收发转换开关、信号处理机、数据处理机、终端显示等设备组成。
图1雷达系统框图随着现代电子技术的不断发展,特别是数字信号处理技术、超大规模集成数字电路技术、电脑技术和通信技术的告诉发展,现代雷达信号处理技术正在向着算法更先进、更快速、处理容量更大和算法硬件化方向飞速发展,可以对目标回波与各种干扰、噪声的混叠信号进行有效的加工处理,最大程度低剔除无用信号,而且在一定的条件下,保证以最大发现概率发现目标和提取目标的有用信息。
雷达发射机产生符合要求的雷达波形,然后经馈线和收发开关由发射天线辐射出去,遇到目标后,电磁波一部分反射,经接收天线和收发开关由雷达接收机接收,然后对雷达回波信号依次进行信号处理、数据处理,就可以获知目标的相关信息。
雷达信号处理的流程如下:图 2 雷达信号处理流程2雷达信号处理的主要内容雷达信号处理是雷达系统的主要组成部分。
信号处理消除不需要的杂波,通过所需要的目标信号,并提取目标信息。
内容包括雷达信号处理的几个主要部分:正交采样、脉冲压缩、MTD和恒虚警检测。
正交采样是信号处理的第一步,担负着为后续处理提供高质量数据的任务。
航管一次雷达抗风电场干扰目标检测方法
杂波的方法对消 目标回波 , 而具有较 宽频谱宽度的风 电场杂波经对消后仍有大部分 的能量剩余 。 然后采用恒虚警率
f C o n s t a n t F a l s e A l a r m R a t e , C F A R ) 检测确定杂波所在的距离单元,并剔除待检测数据中所有杂波单元,解决了
D e t e c t o r , MT D ) 技术无法抑制具有非零频成分的风电场杂波,可能导致 目 标遮蔽和虚警率上升。针对此问题,该
文提 出了一种在 风电场杂波下航管一次雷达的 目标检测方法 。 该方法在 MTD前端设置风 电场杂波抑制器 。在该抑 制 器中首先估计雷达 回波 每个距离单元的谱中心 , 并把所有距离单元的谱 中心移到零频 。 其次利用类似 于对 消固定
Ab s t r a c t :I n r e c e n t y e a r s ,t h e g l o b a l wi n d p o we r i n s t a l l e d c a p a c i t y i s g r o wi n g e xp o n e n t i a l l y .Ho we v e r ,c u r r e n t
第3 5 卷第 3 期
2 0 1 3年 3月
电
子
与
信
息
学
报
Vl 0 1 . 3 5 NO . 3 Ma r . 2 0 1 3
动目标检测器MTD-PPT精选
Sc(f)
1
2c
exp2fc22
计算列表如下:
σc T
0.07 0.08 0.10 0.12 0.14 0.20
CAV(dB) 85.2 61.0 33.5 19.4 11.6 2.8
而 (IS) Im R a C x A(d V) B 1l0 o 1N 0 g (d)B
Ps为每个信号回波的功率,这里假设天线波瓣形状为矩形,所以 每个Ps相等。 Φ 为信号的随机相位。
2fdTr ,是脉冲——脉冲间的相移
2. 杂波回波是:
C TC 1,C 2,.C .M .,
这里: 3. 热噪声:
PcECi 2 是杂波功率
nTn 1,n2,..nM .,
2. 25dB 旁瓣 Chebyshev 加权
c 0.006 0.05 0.07 0.08 0.1 I SIR 93 51.3 43.8 40 32.8 可见,比理想性能相差较大, Chebyshev 加权副瓣越低,则 I SIR
这是系统改善因子上界;当非矩形窗加权时会有 S/N 损失,当 fd 不处于滤波器中央时,应算平均相参积累增益,也会有损失。
三. 实际 MTD 系统的改善因子
非理想白化 非矩形窗加权
实际 ISIR < 理想 ISIR
实际系统为一个 2 脉冲或 3 脉冲 MTI 级联加权滤波器组。 令:对消器传递函数和第 i 个滤波器传递函数的合成为:
具有复加权 W 的多普勒滤波器的噪声增益为
G nP P n n0 i W TP P nnIW *W TW *iN 1W i2
当信号的 fd 从 0PRF均匀分布时,信号平均增益
N
Gs Gn Wi 2 i1
输出信干比为:
MTI动目标显示雷达

样,取样后的波形和频谱均将发生变化。
动目标显示雷达的工作原理及主要组成
当用多普勒效应来鉴别运动目标回波和固定目标回波时, 与普通脉冲雷 达的差别是必须在相位检波器的输入端加上基准电压(或称相参电压) ,该 电压应和发射信号频率相参并保存发射信号的初相, 且在整个接收信号期间 连续存在。 工程上,基准电压的频率常选在中频(相位检波器的相位基准) 。各种 回波信号均与基准电压比较相位。从相位检波器输出的视频脉冲,有固定目 标的等幅脉冲串和运动目标的调幅脉冲串。通常在送到终端(显示器或数据 处理系统)去之前要将固定杂波消去,故要采用相消设备或杂波滤波器,滤 去杂波干扰而保存运动目标信息。 下面着重讨论相参电压的获取和固定杂波 消除这两个特殊问题。
脉冲工作状态时的多普勒效应 盲速和频闪
盲速:是指目标虽然有一定的径向速度������������ ,但若其回波信号经过相位检 波器后,输出为一串等幅脉冲,与固定目标的回波相同,此时的运动速度称 为盲速。 (������������ 等于脉冲重复频率������������ 的整数倍) 频闪: 频闪效应是指当脉冲工作状态时,相位检波器输出端回波脉冲信 号的包络调制频率������������ ,与目标运动的径向速度������������ 不再保持正比关系。此时如 用包络调制频率测速时将产生测速模糊。 (即������������ 超过重复频率������������ 的一半) 产生盲速和频闪效应的基本原因在于, 脉冲工作状态是对连续发射的取
2.消除固定目标回波
在相位检波器输出端, 固定目标的回波是一串振幅不变的脉冲,而运动 目标的回波是一串振幅调制的脉冲。将它们加到偏转调制显示器上,固定目 标的回波是振幅稳定的脉冲,而运动目标的回波呈现上下“跳动”的“蝴蝶 效应” 。 可以根据这种波形特点, 在偏转显示器上区分固定目标与运动目标。 如果要把回波信号加到亮度调制显示器或终端数据处理设备, 则必须先消除 固定目标回波。 最直观的一种办法是将相邻重复周期的信号相减,使固定目 标回波由于振幅不变而相互抵消; 运动目标回波相减后剩下相邻重复周期振 幅变化的部分输出。 A. 相消设备特性 相消设备等效于一个梳齿形滤波器,其频率特性在������ = ������������ ������ 各点均为零。 固定目标频谱的特点是,谱线位于������������������ 点上,因而在理想情况下,通过相消 器这样的梳齿滤波器后输出为零。 但当目标的多普勒频率为重复频率整数倍 时,其频谱结构也有相同的特点,故通过上述梳状滤波器后无输出。 B. 数字相消器 相消器需要迟延线将信号迟延一个脉冲重复周期并和未迟延的信号相 减。 现代大规模的集成电路的迅猛发展,可完全用数字技术来实现信号的存 储、延时和各种实时运算。 首先把从相位检波器输出的模拟信号变为数字信号。 以时钟脉冲控制取 样保持电路对输入相参视频信号取样, 被时间量化的取样保持信号送到模数 转换电路(A/D 变换器)进行幅度分层,转为数字信号输出。数字信号的延 迟可用存储器完成, 将数字信号按取样顺序写入存储器内,当下一个重复周 期的数字信号到来时, 由存储器中都会出同一距离单元的信号进行相减运算, 在输出端得到跨周期相消的数字信号。 一般取样间隔应小于脉冲宽度的一半, 即在一个脉冲宽度以内取样两次 以上。A/D 变换器的量化位数 N 应选到 N≥7 后,量化损失低于 0.08dB,可 以忽略其影响。N 的选择还对系统改善因子有影响。
雷达原理笔记之动目标检测及测速技术

1.1.3 二次杂波对消器
滤波器频率特性:
其中通常取接近2但小于2的常数。
目的同样是在保证尽可能多地滤除杂波的
同时,处在零多普勒点的运动目标不被抑制完全。
对比见下图:
二次杂波对消器是工程中应用最多的杂波处理滤波器。
对于低速的杂波消除,频响特性可以向右平移一定的区间,平移的量是杂波运动速度对应的多普勒频移。
因此对于低速运动杂波对消的滤波特性为:
其中为杂波速度对应的多普勒频移。
利用二次杂波对消器处理杂波时,选取相参积累脉冲个数为。
1.2 多普勒滤波器组处理
一般,将MTI处理后输出的信号进行MTD处理,即窄带滤波处理,得到运动目标的速度信息。
1.2.1 窄带多普勒滤波器组实现
利用有N个输出的横向滤波器,经过各脉冲的加权求和实现。
频响幅度为:。
动目标检测器(MTD)
2)多普勒滤波器组的实现方法
1. FFT算法: 当 M=2T(T=整数)时,可用基 2FFT,并采用加权来 减小旁瓣,降低杂波通过旁瓣的泄漏,提高改善因子。 一般采用:Hamming 或 Chebyshev 加权效果较好。
于前面讲过的平均改善因子。
可见MTD可以看成白化滤波器(具有平均改善因子IMTI) 和相干积累器(多普勒滤波器组)的级联。
白化滤波 IMTI
多普勒滤 波器组GC
由文献知,最佳 W OPT 应为: 干扰协方差阵的逆
* W OPT ( f d ) P R P I S ( f ) c c n d 1
4 ×M2 例:M = 16,则 4×(16)2 :运算量大,复杂
§3. MTD 系统的改善因子
一. 最佳多普勒滤波器组构成的 MTD 系统的改善因子 所谓最佳多普勒滤波器组,即每个滤波器的权函数 Wi 都是 最优权函数。这里最优是相对于一定的杂波模型和信号假设而言 的。 1. CPI 中M个信号回波可用一复矢量表示:
所以 BMTD 的定义为:将一个 CPI 中的回波结合为一 组,来进行 MTD 处理。 波束中的回波应分为 2 个CPI,才能保证至少一个CPI
中包含了全部目标信息,否则会导致 S/N 下降,降低
检测性能。
CPI2 CPI1 ¿ ± Ä ê
例:击中数 H=32 时, m=16 (个), 这是最大值
1
2
这里: Sc(f) 是杂波功率谱 (采样前,f 是从 0 内扩展的)
rep 1 SC ( f ) SC ( f j ) T T j
mtd动目标检测原理
mtd动目标检测原理
MTD动目标检测原理是一种用于实时视频监控和检测的技术,它能够通过对视频帧进行分析,准确地检测出移动物体。
该原理基于视频中移动目标的像素值变化,通过比较相邻帧的像素值差异来确定是否存在移动目标。
在检测的过程中,MTD会将每帧图像分成多个区域,并计算每个区域的像素变化值。
首先,MTD采集两个连续帧的图像,并将它们转换为灰度图像。
然后,它计算每个像素的绝对差值。
接下来,MTD将所有像素的差值相加,得到某个区域的总像素差值。
在确定移动目标的位置时,MTD通过设置一个动态阈值来筛选出像素差值大于阈值的区域。
这些区域被认为是可能存在移动目标的部分。
为了减少误检测和提高检测的准确性,MTD还可以通过应用一些滤波算法来排除噪声。
同时,MTD还会采用多帧图像的平均像素值来对比判断移动目标。
MTD动目标检测原理具有实时性强、准确性高的特点。
它可以应用于各种实时监控系统中,如交通监控、安防监控、智能家居等领域,为人们提供更安全、便捷的生活环境。
总之,MTD动目标检测原理是一种基于像素变化的实时视频监控技术。
通过计算像素差值和设定动态阈值,它能够快速、准确地检测出移动目标,为各种实时监控系统提供支持。
RSP_MTI & MTD

2005.07
MTD 与 MTI 的比较
早期的MTI雷达改善因子一般在20dB左右,而雷达的实际杂波强 度可能达到50dB甚至更强。MTI雷达性能不高是多方面原因造成的: 如锁相相参系统的高频稳定性不够,采用模拟延迟线通常只能做一次 相消且性能不稳定,不能实现最佳滤波,等等。 动目标检测(MTD)是在MTI基础上发展起来的一项更有效的 频域滤波技术。与MTI相比,MTD主要在三个方面作了改进: 1. 增加一个多普勒滤波器组,使之更接近于最佳(匹配)线性滤 波,在抑制固定杂波的同时,也能抑制气象、鸟群等慢动杂波,有效 地提高改善因子。这是MTD不同于MTI的核心区别; 2. 增加一个或多个杂波图,使之能够检测切向飞行的大目标; 3. 利用数字信号处理实现长时间的存储与延迟,并增大信号处理 的线性动态范围。
SCV(dB) I(dB)-V0 dB) = (
CA、CR、I和SCV只要知道其中一个就能推算其它三个。 其它指标:杂波间可见度、滤波器失配损耗、杂波可见度 因子可参见《雷达手册》。
参考文献:马晓岩,向家彬等,《雷达信号处理》,湖南科学技术出版社,第5章
盲相及其消除方法
相参MTI通过相邻回波脉冲的相位相减提取动目标回波,当 相邻脉冲间动目标回波的相位差正好为π 的整数倍时,MTI滤波 器将无输出(推导过程见参考书),出现“盲相”。
参考文献:《雷达手册》(第二版),第15章,电子工业出版社,2003
MTI 原理
对非相参雷达,实现MTI则需要对回波包络进行对 消,其原理可见参考书。 MTI实际上是一种频域滤波器。用数字器件实现的 一次对消MTI滤波器结构图如下:
参考文献:马晓岩,向家彬等,《雷达信号处理》,湖南科学技术出版社,第5章
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
可见MTD可以看成白化滤波器(具有平均改善因子IMTI) 和相干积累器(多普勒滤波器组)的级联。
白化滤波 IMTI
多普勒滤 波器组GC
由文献知,最佳 W OPT 应为: 干扰协方差阵的逆
W OPT ( f d ) Pc R c Pn I S ( f d )*
2
n
(这里假设 s,c,n 为统计独立的)
5. 改善因子:
输入信干比为:
Ps ( SIR) in Pc Pn
令多普勒滤波器组有复加权 W
W w1 , w2 ,..., wN
T
, wi 为每一个滤波器通道的权值
则滤波器的输出为: 相应的输出功率为:
YX W
T
*
PY E Y
T
所以 BMTD 的定义为:将一个 CPI 中的回波结合为一 组,来进行 MTD 处理。 波束中的回波应分为 2 个CPI,才能保证至少一个CPI
中包含了全部目标信息,否则会导致 S/N 下降,降低
检测性能。
CPI2 CPI1 ¿ ê Ä ±
例:击中数 H=32 时, m=16 (个), 这是最大值
二. 乒乓存储器:
为了实时进行成组处理,必须首先将一个 CPI 中的全
部回波数据存储起来,当该 CPI 数据全部存完后(乒 存储器存满后),则取出来沿距离间隔顺序处理,与此 同时,对下一个 CPI 的回波数据进行存储(存入乓存 储器)
乒乓存储器容量: 设:CPI = m 距离间隔 = n A/D字长 = b bits
PCi
PRF
0 PRF
rep1 Sc ( f )df Sc ( f )df
T
PC0
Pni 1
0
rep1 Sc ( f ) H iw ( f ) df
T
2
Pn0
则:
PRF
0
H iw ( f ) df
2
C AVi
PRF 0
PRF0reFra bibliotek 1 S c ( f )df
Pn0
T
*
2
当信号的 f d 从 0 PRF 均匀分布时,信号平均增益
G s Gn Wi
i 1
N
2
输出信干比为:
( SIR) out
Ps W R s ( f d )W Pc0 Pn0 Pc W T R c W * PnGn
Ps0
T
*
则改善因子:
输入(杂波+噪声)功率 信号功率增益
MTD 输出值
F1 F2
. . .
CFAR CFAR
¡ ó Ñ ´
FN
CFAR
§2. 成组处理MTD——BMTD
一. CPI:
天线扫过一个点目标时在方位上的相继回波数,称为
击中数 H。 CPI —— 相参处理间隔是BMTD中组的大小。若一个 CPI内的回波数为 m,应保证:
H m n
这里
n 2(整数)
T 2 T
rep 1 S c ( f ) H iw ( f ) df
xi
加权
FFT
滤波器组的FFT实现
优点:运算量少,设备简单;
M 运算量为: log 2 M 次蝶形运算。 2 M 采用四周蝶形算法,故乘法次数为 4 log 2 M 2
16 例:M=16,乘法次数为 4 log 2 16 4 32 128 次乘加。 2
缺点:每个滤波器形状完全一致,不灵活。
1
2
这里: Sc(f) 是杂波功率谱 (采样前,f 是从 0 内扩展的)
rep 1 SC ( f ) SC ( f j ) T T j
0 f PRF 1 T PRF
,j 取整数
相当于把杂波功率折叠到
0 PRF 内
白化滤波器平均归一化对消比:
C AV
3) 匹配滤波器
目标 fd 从 0-fr 均匀分布,所以设置多普勒滤波器组
来近似实现匹配滤波;可用 FIR 或 FFT 来实现。
ä ö Ë ² ÷ Ê ³  ¨Æ
fd ¿ ± Ä ê
fr
f
4) 频域CFAR和选大
在每一多普勒滤波器通道输出设置CFAR电路;各通
道过 CFAR 门限的信号相互比大,取最大值作为
实际系统为一个 2 脉冲或 3 脉冲 MTI 级联加权滤波器组。 令:对消器传递函数和第 i 个滤波器传递函数的合成为:
H iw ( f ) H1 ( f ) H i ( f )
对
H iw ( f ) 而言,归一化对消比为:
C AVi PCi Pn0 (杂波抑制比)×(噪声增益) PC0 Pni
T *
输出(杂波+噪声)功率
Pc Pn I SIR ( f d ) W R s ( f d )W T * W ( Pc R c Pn I )W W R s ( f d )W W W ( Pc Pn ) T T * * W W W ( Pc R c Pn I )W
T * T *
又:
PCi Pn0 (杂波抑制比)×(噪声增益) PC0 Pni
PRF 0 PRF
PCi
rep1 Sc ( f )df Sc ( f )df
T
PC0
令
0
rep1 Sc ( f ) H w ( f ) df PRF
T
PRF 0
2
Pni 1,
Pn0
f d 2 f c ( f d ) k exp 2 c
可用数值计算出不同
c
和 N 时的
I SIR
当:
c
fr
I SIR
0.09, N 9 时
6 4 N=2 8
I SIR 55 dB
c
fr
0.11
2 3 14 4 18 6 25 9 32.5 16 40
2. FIR算法
a) 权系数设计:窗函数法 ……任意窗函数 Remez多重变换算法……旁瓣约束等波纹设计法
权系数 hi(n), ( i=1,2,……,M), (n=1,2,……,M)
b) 具体算法: yi
x h (M n 1),
n 1 n i
M
i=1,2,……,M
这里 yi 和 xn 为复数, 于是有:
T
C C1 , C2 ,..., CM
这里:
3. 热噪声:
T
Pc E C i
2
是杂波功率
n n1 , n2 ,..., nM
这里: 4. 总输入为:
PN E n i
2 S C
为噪声功率
X S ( fd ) C n
PX E X i
P P P
I SIR ( f d ) Gc I MTI
W R s ( f d )W Gc T * W W
T *
T
*
为信号功率增益对噪声功率增 益之比,即为相干积累增益
I MTI
W W ( Pc Pn ) 为归一化的干扰抑制比,即干 T * W ( Pc R c Pn I )W 扰抑制比乘噪声增益。这相当
E( X W )
2 T
* T*
其中,E X X
*
W E X X W
* T
T
(X W )
T
*
*
代表输入回波的协方差矩阵,用 R X 表示
R X PS R S ( f d ) PC R C Pn R n
(因S,C,n相互统计独立)
1 这里, R s ( f d ) E S ( f d )* S ( f d )T Ps 1 * T Rc E C C Pc
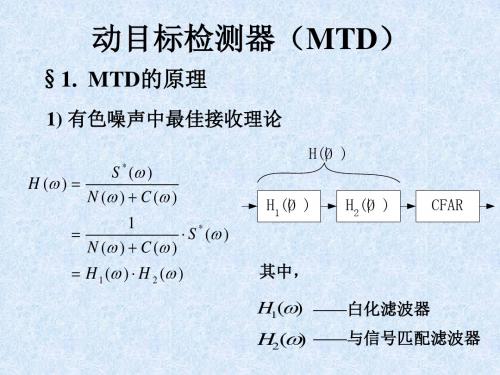
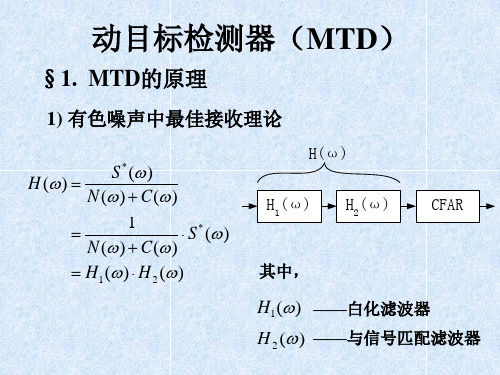
其中,
H1 ( ) ——白化滤波器
H 2 ( ) ——与信号匹配滤波器
2) 白化滤波器的实现
白化滤波器频率特性应为有色杂波加噪声谱的倒 数,在实现上有几种近似方法: A) MTI 对地杂波近似白化 B) 速度自适应 MTI,对运动杂波近似白化 C) MTI + 速度自适应 MTI,对地杂波和运动杂 波同时实现近似白化 D) 最大熵谱估计 AMTI,理想白化
1
信号的复共轭
具有最佳加权的MTD就是有色噪声中的最佳检测器。 由于 W OPT ( f d ) 和 I SIR ( f d ) 都是 f d 的函数,当 f d 在 0 PRF 中均匀分布时,该最佳处理器的平均改善因 子为:
I SIR
1 fr
fr
0
I SIR ( f d )dfd
例:杂波谱为高斯形
4 ×M2 例:M = 16,则 4×(16)2 = 1024 (复乘)
优点:灵活,性能好 缺点:运算量大,复杂
§3. MTD 系统的改善因子
一. 最佳多普勒滤波器组构成的 MTD 系统的改善因子 所谓最佳多普勒滤波器组,即每个滤波器的权函数 Wi 都是 最优权函数。这里最优是相对于一定的杂波模型和信号假设而言 的。 1. CPI 中M个信号回波可用一复矢量表示:
动目标检测器(MTD)
§1. MTD的原理
1) 有色噪声中最佳接收理论
S * ( ) H ( ) N ( ) C ( ) 1 S * ( ) N ( ) C ( ) H 1 ( ) H 2 ( )
H(¦ ) Ø H1(¦ ) Ø H2(¦ ) Ø CFAR
¸ æ ¢ ÷ Æ ´ ´ Æ Ò æ ¢ ÷ Å ´ ´ Æ
则:Z = 2 × m × n × b × 2 = 4mnb | | 乒乓 I, Q