雷达动态探测目标的仿真建模
宽带雷达动态目标建模及仿真研究

最后针 对一种特殊 的宽带信号一 冲击 雷达信号 , 给出一个实
例, 并对其进行计算机 仿真试 验研究 , 推导 出复杂运 动 目标
在不同运动状态下 的回波模型 。
2 动 态点 目标模 型
实际的 目标运动并非理想轨迹 运动 , 可以将 其模型化 但 为理想运动加上相应 的噪声。以此作 为理论基础 , 首先研究 点 目标在理想运 动形 式下 的回波信号模 型。
简单 , 目标散射中心返 回的 目标 回波信号 是简单 的发 射信 从
smu ai n fs atrn eu n r r s n e .T e rs l h w t a h i lt n ie a g o h r ce i i f a— i lt s o c t i g r tr sa e p e e t d h e u t s o t e smu ai sgv o d c a a tr t o r o e s h t o sc t g t ,wh c i s it n u d rtn i g r d rtr e e o n t n es ih w l a ss i n esa d n a a g t c g i o . l a r i
KEYW ORDS: i e a d rd ;Mo i g tr e ;Mo ei g W d b n a a r vn a g t d l ;EM c t r g n s at i en
1 引言
现代雷达技术 已经由传统的参数测量发展到 目标识别的 新阶段 , 运用雷达 技术对运 动 目标进行 跟踪 、 识别 、 成像 在军 用及 民用领域有着广泛 的应 用 , 该技术 的一项 重点内容就是 需要对 目标回波进行分析 、 处理 , 以期获得与 目标特性 密切相 关 的参数 。因此 , 建立合理 的动态 目标模 型是非常必要 的。 当前 国内外 学者对 传统雷 达的 目标 回波建 模 已经 进行 了广泛 的研究 , 是传 统 的雷达多 采用 窄带信 号 , 但 目标 回波
雷达仿真模型设计与实现

雷 达 在 空 间 中 的姿 态 可用 欧 拉 角 来 确定 ,如 图 3所 示 。
1 引 言
雷 达 作 为 现 代 武 器 的 眼 睛 ,是 获 取 战 场 信 息 的重 要 装 备 。
闲此 ,在 作 战 仿 真 和战 争 类 游 戏 中 ,雷 达 仿 真 模 型 的设 计 与 实
Y
图 1 世 界 坐 标 系 示 意 图
建 立 以雷 达 主 方 向 为 X 轴 的 右手 坐 标 系 为 雷 达 的局 部 坐 标
系 , 如 图 2所 示 。
( )
( )
/以
图4 2_. 视 距 离 22通
雷 达探 测 区域 示 意 图
在 雷 达 的实 际使 用过 程 中 ,最 远 探 测 距 离 除 受 雷 达 本 身 的 技 术性 能 影 响 ,还 受 地球 曲率 影 响 ,即 雷 达 的 通 视 距 离 。 如 图
厂cs s 0 o , it ] 9 n9
L =—i9c , 0 z ls ̄ o9 ) n s l
l 0 0 1f () 4
绕 X轴 的基 元 旋 转 矩 阵 为 :
f 0 0] 1 (=0 o s? } s i, ) cy n )
式 中 R : 准 大气 下 地 球 当量 半 径 ( 为 89 标 约 4 0公 里 ;
h :雷 达 天 线 所 在 高度 ,( ) , 米 ;
h : 目标 高 度 , ( ) 2 米 。
2_. 测 概 率 23探
理 论 上 ,在 此 区 域 内 的 目标 ,都 会 被 雷 达 发 现 存 在 一 定 的 概 率 。工 程 实 践 表 明
火控雷达动态目标探测跟踪建模仿真
火控雷达动态目标探测跟踪建模仿真
肖强;张宏伟;韩壮志
【期刊名称】《计算机测量与控制》
【年(卷),期】2015(23)4
【摘要】火控雷达目标探测跟踪是现代与未来防空作战的首要任务,也是火控系统的关键环节;针对火控雷达连续、自动、快速跟踪目标的特点,首先分析了火控雷达系统闭环连续探测跟踪工作流程,然后利用信号级建模方法,在信号层面上进行了雷达回波信号生成、信号处理与跟踪控制的一体化建模,并给出了各模块模型,最后完成动态火控雷达闭环目标距离、方位角与高低角三维探测跟踪测量过程仿真与分析;仿真结果不仅验证了建模方法与模型逼真有效,也对以后火控雷达跟踪性能评估、数据处理等仿真研究有着一定的参考价值.
【总页数】4页(P1222-1225)
【作者】肖强;张宏伟;韩壮志
【作者单位】军械工程学院电子与光学工程系,石家庄050003;军械工程学院电子与光学工程系,石家庄050003;军械工程学院电子与光学工程系,石家庄050003【正文语种】中文
【中图分类】TN95
【相关文献】
1.用于高动态目标探测雷达的相位编码脉冲压缩技术 [J], 张剑;周兴建;卢建川
2.低轨红外探测卫星对大气层内高动态目标的探测能力研究 [J], 田博;谢放;范春懿;
陈素芳;李萌萌
3.近地层紫外动态目标探测微弱信号放大器设计 [J], 李旭辉;吴晗平;李军雨;王连振;岳健民
4.浮空红外探测系统预警高动态目标性能分析 [J], 刘旭;李为民;别晓峰
5.基于双基地雷达探测的跟踪优化建模仿真研究 [J], 程丰;湛兰;卢一帆
因版权原因,仅展示原文概要,查看原文内容请购买。
雷达动态探测目标的仿真建模

雷达动态探测目标的仿真建模谢卫,陈怀新(中国电子科技集团公司第十研究所,成都 610036)摘要:通过对雷达动态探测目标过程分析,提出了雷达探测目标仿真模型的方法,实现了雷达目标检测、多目标滤波跟踪、资源调度管理等数字模型。
实际表明这些模型满足数据融合中雷达探测目标数据的需求,并且建模方法对数据融合传感器模型建立具有实际指导意义。
关键词:雷达;建模;仿真;数据融合Radar detection of targets dynamic simulation modelingXIE Wei,CHEN Huai-xin(CETC No.10th Research Institute, Chengdu, China; )Abstract:With the analysis of the process of radar dynamic detecting targets, a method of the simulation model based on of radar detect targets is presented, some mathematic models (such as target indication by radar, variable number of targets tracking, resource management based on Scheduling algorithm) are realized. An actual experiment that the simulation data provided by radar detecting model can supply for the study of data fusion was made, simultaneity modeling method has a certain actual instructing meaning at the aspect of sensor detecting model of data fusion.Key words: radar; modeling; simulation; data fusion1 引言现代战场上各种目标的出现,要求利用多种传感器组网来采集信息并加以融合,充分利用不同目标各个方向、不同频段的反射特性,最大限度地提取信息,满足战场需要。
机载雷达探测性能建模及仿真
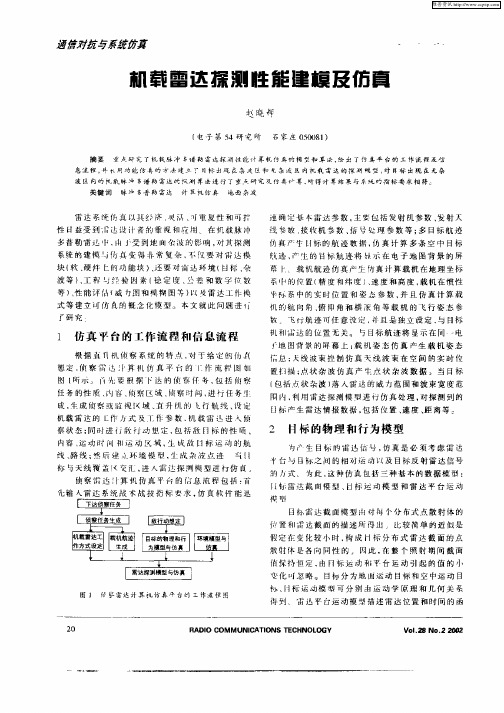
图 1 不 。 先 要 根 据 F达 的 侦 察 任 务 , 括 侦 察 所 包
任 务 的性 质 、 容 、 内 侦察 区 域 、 察 时 问 , 行 任 务 生 侦 进 成 , 成 侦 察 或 监 视 域 、 升 机 的 E行 航 线 、 定 牛 直 设 机载 雷 达 的 [ 作 式 及 工 作 参 数 . 载 雷 达 进 ^ 侦 机
线 参 数 、 收 机 参 数 、 号处 理 参 数 等 ; 目标 航 迹 接 信 多 仿 真 产 生 [标 的 航 迹 数 据 , 真 汁 算 多 条 空 中 目标 { 仿
舭 迹 , 生 的 目标 航 迹 将 示 在 电 子 地 图 背 景 的 屏 产
系统 的 建 模 。 真 变 得 非 常 复 朵 , 仅 要 对 雷 达 模 j仿 不
息流程 , 牛采 用 功 能 仿 真 曲 方 法 建 立 了 目标 出现 在 杂 涟 区 和 杂 波 区 内机 栽 雷 迭 的 探 测 罐 型 . 目标 出现 在 无 杂 对 波 匡 内曲 扣 载 脉 冲 多谱 釉 雷达 的捉 测 算 法进 行 了 重点 研 宄 理 仿真 算 , 得 计 算 站 果 与 系统 的指 标要 求相 符 L 所 关键词 脉 冲 多普 勒 雷达 计 苴 礼 仿 真 地 面杂 波
数 一 飞 行 航 迹 可 任 意 设 定 , 且 是 独 立 设 定 , 目标 井 与 机 干雷 达 的位置 无关 。 【 J 目标 航 迹 将 显 示 在 同 一 电 r 图 背 景 的屏 幕 上 ; 机 姿 态 仿 真 产 生 载 机 姿 态 地 载 信 息 : 线 波束 控 制 仿 真 天 线 波 束 在 空 间 的 实 时 位 天
雷达杂波建模仿真分析及目标检测研究

(申请工学硕士学位论文)(申请工学硕士学位论文)雷达杂波建模仿真分析 及目标检测研究培养单位:信息工程学院 学科专业:信号与信息处理 研 究 生:黄杰 指导老师:杨杰 教授2014年5月分类号 密 级 UDC 学校代码 10497 学 位 论 文 题 目 雷达杂波建模仿真分析及目标检测研究 英 文 Research on Radar Clutter Modeling and Simulation 题 目 Analysis and Target Detection 研究生姓名 黄 杰 姓名 杨 杰 职称 教授 学位 博士 单位名称 武汉理工大学信息工程学院 邮编 430070 申请学位级别 硕士 学科专业名称 信号与信息处理 论文提交日期 2014年4月 论文答辩日期 2014年5月 学位授予单位 武汉理工大学 学位授予日期 答辩委员会主席 评阅人2014年5月指导教师独创性声明本人声明,所呈交的论文是本人在导师指导下进行的研究工作及取得的研究成果。
尽我所知,除了文中特别加以标注和致谢的地方外,论文中不包含其他人已经发表或撰写过的研究成果,也不包含为获得武汉理工大学或其他教育机构的学位或证书而使用过的材料。
与我一同工作的同志对本研究所做的任何贡献均已在论文中作了明确的说明并表示了谢意。
签名:日期:学位论文使用授权书本人完全了解武汉理工大学有关保留、使用学位论文的规定,即学校有权保留并向国家有关部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。
本人承诺所提交的学位论文(含电子学位论文)为答辩后经修改的最终定稿学位论文,并授权武汉理工大学可以将本学位论文的全部内容编入有关数据库进行检索,可以采用影印、缩印或其他复制手段保存或汇编本学位论文。
同时授权经武汉理工大学认可的国家有关机构或论文数据库使用或收录本学位论文,并向社会公众提供信息服务。
(保密的论文在解密后应遵守此规定)研究生(签名):导师(签名):日期:摘要雷达的作用是对各种目标进行探测,以得到人们想要的某些信息,称为有用信息,但雷达发射信号被反射回来时包含的信息十分丰富,对于其中那些人们不想要的某些信息,称为无用信息,它们会对有用信息产生干扰,为了得到清晰准确的有用信息,必须对雷达回波信号进行必要的处理,剔除抑制那些无用信息。
如何使用激光雷达测绘技术进行三维建模与分析
如何使用激光雷达测绘技术进行三维建模与分析激光雷达测绘技术的应用在当今的建筑与工程领域中变得越来越重要。
借助激光雷达测量技术,我们可以快速而准确地获取三维空间中的数据,进行建模与分析。
本文将探讨如何使用激光雷达测绘技术进行三维建模与分析,并探讨其中的优缺点。
1. 简介激光雷达测绘技术是一种通过向目标物体发射激光脉冲并测量其返回时间来获取距离与位置信息的技术。
通过扫描激光束,激光雷达可以获得大量离散的点云数据,再利用这些点云数据可以进行三维建模与分析。
2. 数据采集使用激光雷达进行三维建模的第一步是数据采集。
激光雷达装置通常被安装在无人机、车辆、船只或三脚架上,通过旋转或移动激光雷达设备,可以获取目标物体的所有可见表面的点云数据。
数据采集过程中,设备可以通过GPS定位以获取目标物体在地理坐标系中的位置,这为后续数据处理提供了基础。
3. 数据处理激光雷达数据的处理是进行三维建模的关键步骤之一。
通过对采集到的海量点云数据进行滤波、配准和分割等处理,可以得到高质量的点云数据集。
滤波可以去除噪声点,配准可以将不同视角的点云数据融合在一起,分割则可以将点云数据分为不同的部分,比如建筑物和地面等。
4. 三维建模激光雷达测绘技术的一个重要应用就是三维建模。
通过将处理后的点云数据转化为三维模型,可以准确地反映目标物体的形状、结构和细节。
三维建模可以用于建筑物、道路、城市等场景的重建,有助于工程设计、规划和管理。
5. 数据分析除了三维建模,激光雷达测绘技术还可以进行数据分析。
通过对点云数据进行分析,可以提取目标物体的特征,比如体积、高度和形状等。
这些特征可以用于评估目标物体的稳定性、安全性和健康状态等。
激光雷达还可以用于物体的位移监测和变形分析等。
6. 优缺点激光雷达测绘技术具有许多优点。
首先,它具有高精度和高分辨率,能够获取非常详细的点云数据。
其次,它可以进行非接触式测量,无需直接接触目标物体即可进行测量,减少了测量过程中的损耗和危险。
雷达回波建模与仿真作业
雷达回波建模与仿真作业雷达回波建模与仿真作业雷达回波的建模与仿真是雷达工程中非常重要的一步。
下面将结合实际应用场景,从模型建立和仿真过程两个方面续写。
一、模型建立1. 存在的问题雷达回波的建模是根据目标散射特性和雷达性能参数进行的,然而真实环境中目标复杂多变,雷达参数也会受到众多因素的影响,仅仅通过理论公式很难完全准确地描述回波信号。
2. 基于物理原理的模型建立为了更准确地建立回波模型,可以基于物理原理进行仿真模拟。
通过目标特性分析,将目标分解为若干个散射单元,根据散射单元的位置、极化方向、散射强度等参数,在各个方向上计算目标的散射截面。
考虑到雷达的特性,如发射信号的功率、波束特性、接收信号的增益等,通过波动方程或其他适当的数学公式计算目标距离、速度等参数。
将目标的散射截面和雷达参数结合起来,计算回波信号的功率、波形等,并进行合理的处理和修正。
3. 引入统计特性实际环境中的杂波干扰和噪声会对回波信号造成影响,在模型建立过程中可以引入各种统计特性。
可以考虑杂波的统计分布和功率谱密度,噪声的功率谱密度等,并结合雷达系统的性能参数,如信噪比、动态范围等,对回波信号进行更加真实的建模。
二、仿真过程1. 计算环境参数进行雷达回波的仿真前,首先需要确定仿真的计算环境参数。
包括雷达的工作频率、发射功率、天线增益等,以及目标和背景的散射特性,如目标的散射截面、背景材料的散射特性等。
2. 设定仿真场景根据具体应用场景的需求,设定仿真场景。
包括目标的位置、速度、方向等参数,在空间中随机或指定位置生成目标集合。
考虑随机性和多样性,可以引入目标的不确定性因素,如目标的姿态变化、形态变化等。
3. 进行回波仿真计算根据建立的回波模型和仿真的环境参数,进行回波的仿真计算。
针对每个目标,根据其位置、速度等参数,计算回波信号的功率、相位、波形等,并考虑噪声和杂波的影响,进行修正处理。
4. 仿真结果分析通过对仿真结果进行分析,可以评估雷达系统的性能。
基于FEKO软件实现目标动态RCS仿真
基于 FEKO软件实现目标动态 RCS仿真摘要:雷达目标检测、目标跟踪、目标识别、威胁评估、雷达的最大作用距离估计等方面,RCS都是极其重要的基本参数,本文以某飞机模型为研究对象,通过计算和分析构建了该目标的静态RCS数据库,在此基础上,通过动目标姿态轨迹数据生成或飞行实测数据、推导了雷达站心坐标系与目标坐标系之间的转换关系,得到了目标动态RCS仿真数据。
该方法对雷达目标动态特性的仿真研究具有重要的参考价值。
关键词:静态RCS数据库动态RCS数据库坐标系转换一、雷达散射截面积定义及影响因素雷达散射截面积(Radar Cross Section,RCS)是表征雷达目标对于雷达入射波散射能力的物理量。
雷达散射截面积的定义为单位立体角内目标朝接收方向散射的功率与从给定方向入射于该目标的平面波功率密度之比的4π倍,该定义假设目标在平面波照射下各向同性散射。
对于给定的平面入射波,其能量密度为(1-1)式(1-1)中,和分别为入射波的电场强度和磁场强度,“*”号表示复共轭,和为相应的复振幅,为自由空间的波阻抗。
对于RCS大小为的目标,其所截获的总功率为入射功率密度与的乘积:(1-2)如果目标将该功率在空间中各向同性的散射出去,则距离目标R的位置对应的散射波功率密度为(1-3)若用散射电场强度表示散射波功率密度,则为(1-4)则由式(1-3)和(1-4)相等,可以推出(1-5)因为入射波为平面波,当R趋于无穷远时,散射电场强度与R成反比,入射电场强度与R成正比,这样与R无关。
对于原厂RCS而言,式(1-5)应更严格的写为:(1-6)由式(1-6)可知RCS为标量,常用的量纲为。
在实际工程中常用其相对于1的分贝数表示,即分贝平方米,记为dBsm,用来表示目标反射强度。
(1-7)二、RCS计算方法散射场的计算方法大致可以分为三种:第一种方法是电磁散射场的严格解,它作为经典的边值问题,根据Maxwell方程和边界条件在直角左边坐标、柱坐标、球坐标和其他正交坐标系中通过分离变量法求解。
雷达动态探测目标的仿真建模
Rada t c i n f t r t dy m i smul to m o lng r de e to o a ge s na c i ai n dei
Xi e eW i
( ET .Oh R sac ntue hn d ,Scu n 6 0 3 ,C ia C C No1t eerh Isi t t ,C eg u i pee td o te t dl (uh a ag tidct n b aa,vr be n mbr o agt t cig a a eet agt i rsne ,sme mahmai moes sc stre n iai y rd s c o r ai l u e ftre r kn , a s a rsuc ng metb sd o ceuig ag rh eo re ma ae n ae n S h dl loi m)ae razd An ata ep r n h tte s lt n dt rvdd b aa n t r el e . cu l x ei tta h i ao aapo ie y rd r i me mu i
文 以雷达为例 , 分析其数据处理 流程 , 并进行仿真建模 。
雷达的视线和响应范 围之 内 , 并获得 目标相对 于雷达的位置及 角度信息 。为了描述雷达 与 目标的交会几何关 系 , 需考虑 四维 选通模 型 : 利用距离 波门 、 俯仰和 方位波束及 速度波 门信息 来 判断 目标是否被 雷达捕获 。
0 引言
雷达探 测功能仿真 是通过仿 真 目标 回波 、 接收机 噪声 、 干 杂波等信号的幅度信息来复现雷达的检 测过 程。 现代 战场 上各种 目标的 出现 , 要求利用多种传感器组 网来 扰 、 从图 1 以看 出 , 可 雷达探 测的功能 仿真 , 主要是根据 目 与 标 采集 信息并 加 以融合 , 分利用 目 的各个方 向 、 充 标 不同频段 的 雷达的交会几何关系计算信号 及干扰的功率 。因此 , 需要对 目 反射特性 , 大限度地提 取信 息 , 最 满足 战场需要 。对于数据融 目标与环境 、 雷达检测过程 、 雷达测 合 来说 , 真实 的战场 目标 和传感器探 测数据 , 是检 验其有效性 标与雷达交会 的几何关 系、
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
雷达动态探测目标的仿真建模谢卫,陈怀新(中国电子科技集团公司第十研究所,成都 610036)摘要:通过对雷达动态探测目标过程分析,提出了雷达探测目标仿真模型的方法,实现了雷达目标检测、多目标滤波跟踪、资源调度管理等数字模型。
实际表明这些模型满足数据融合中雷达探测目标数据的需求,并且建模方法对数据融合传感器模型建立具有实际指导意义。
关键词:雷达;建模;仿真;数据融合Radar detection of targets dynamic simulation modelingXIE Wei,CHEN Huai-xin(CETC No.10th Research Institute, Chengdu, China; )Abstract:With the analysis of the process of radar dynamic detecting targets, a method of the simulation model based on of radar detect targets is presented, some mathematic models (such as target indication by radar, variable number of targets tracking, resource management based on Scheduling algorithm) are realized. An actual experiment that the simulation data provided by radar detecting model can supply for the study of data fusion was made, simultaneity modeling method has a certain actual instructing meaning at the aspect of sensor detecting model of data fusion.Key words: radar; modeling; simulation; data fusion1 引言现代战场上各种目标的出现,要求利用多种传感器组网来采集信息并加以融合,充分利用不同目标各个方向、不同频段的反射特性,最大限度地提取信息,满足战场需要。
对于数据融合来说真实的战场目标和传感器探测数据,是检验其有效性的最好条件。
然而这样的真实数据很少,而且成本也较高,在融合算法的前期研究和实验阶段,就需要我们较真实的模拟多中传感器的探测数据。
雷达是战争中至关重要的侦察手段,本文以雷达为列,分析其数据处理流程,并进行仿真建模。
2 雷达探测仿真建模雷达探测功能仿真是通过仿真目标回波、接收机噪声、干扰、杂波等信号的幅度信息来复现雷达的检测过程。
一般采用基于Monte Carlo的方法来实现,其流程如下图所示:Yes No随机数dP图1 基于Monte Carlo 方法的雷达功能仿真流程图从图中可以看出,雷达探测采用功能仿真时,主要是根据目标与雷达的交会几何关系计算信号及干扰的功率。
因此,需要对目标与雷达交会的几何关系、目标与环境、雷达检测过程、雷达测量精度等建立数学模型。
2.1交会几何模型交会几何模型是根据雷达的工作状态,判断目标是否落入雷达的视线和威力范围之内,并获得目标相对于雷达的位置及角度信息。
为了描述雷达与目标的交会几何关系,需考虑四维选通模型:利用距离波门、俯仰和方位波束及速度波门信息来判断目标是否被雷达捕获。
2.2目标及环境模型目标及环境模型是对目标及目标所处的杂波环境进行建模,获得目标和杂波的特性参数。
由于是功能级别仿真,所以建模时候只考虑了目标的功率,杂波没有考虑。
2.3检测模型检测模型是在计算综合信干比的基础上,结合门限电平和雷达的检测曲线来判断雷达是否发现目标。
在检测模型中,既要考虑雷达信号处理方法对综合信干比的改善,还要考虑各种损耗带来的影响,本文采用回波仿真模型。
回波仿真模型主要包括目标回波仿真数学模型、接收机噪声仿真数学模型、干扰仿真数学模型及杂波仿真数学模型。
(1) 目标回波仿真数学模型目标回波功能仿真模型描述的是雷达接收到的目标回波信号功率,用数学公式可表示为:234(4)t t r t r s s s PG G F F P D R L λσπ=⋅式中,P t —雷达发射机峰值功率(W);G t —雷达发射天线增益;G r —雷达接收天线增益;F t ,F r —雷达天线方向图传输因子;R —目标到雷达的距离(m);λ—雷达工作波长(m);σ—目标散射截面积(RCS);D s —综合改善因子;L s —综合损耗(2) 接收机噪声仿真数学模型接收机输出噪声包括外部天线噪声和接收机工作时产生的内部噪声。
接收机噪声模型可以表示为一个服从均值为0,方差为2n σ的正态分布的随机过程。
(3) 干扰仿真数学模型干扰按干扰能量分为有源干扰和无源干扰。
干扰按干扰信号的作用原理分为遮盖性干扰和欺骗性干扰,其干扰功率可通过干扰雷达方程得到。
(4) 综合信干比雷达检测信干比是由多方面因素综合决定的,其中包括目标回波功率、接收机噪声功率、干扰信号功率及杂波功率等。
则综合信干比用公式可表示为:/10*log(/())s n j c S N P P P P =++其中,,,,s n j c P P P P 分别为雷达检测端的信号功率、接收机噪声功率、干扰功率和杂波功率。
3 雷达探测仿真软件实现3.1系统框架仿真软件按组成结构分为战场虚拟目标及状态仿真软件和雷达动态探测仿真软件两大部分。
其中,战场目标仿真软件用于制作想定,对目标进行布站以及提供目标速度、位置、航迹、型号以及目标所搭载的辐射源信息等。
雷达探测仿真软件接收目标仿真软件产生的目标原始数据,并进行相关雷达数据处理,如计算信噪比、交汇计算等,模拟雷达对目标的探测处理,产生雷达探测目标的相关数据,成为后端融合处理系统的输入,软件结构及相互关系如图所示:图2 系统体系结构3.2雷达检测模块雷达检测模块主要功能就是获取目标的点迹和检测信息,主要完成坐标系转换、交会计算、检测计算等任务。
图3 雷达目标检测流程(1) 坐标系转换由于目标和雷达平台的位置参数都是在大地坐标系下给出的,为了得到目标相对于雷达平台的角度和速度信息,需要将目标的位置和速度转换到天线阵面直角坐标系。
(2) 交会判断搜索时,利用俯仰和方位波束信息来判断;当目标已被跟踪上时,可以预测到目标的距离和速度时,就可以利用距离波门、速度波门、俯仰及方位波束信息来判断。
假定目标在天线阵面方位坐标系下的位置(,,a a a r θϕ),雷达波束中心在天线方位坐标下的坐标(0θ,0ϕ),方位和俯仰的波束宽度分别为33,dB dB θϕ,则交会成功的判断条件为0303()()a dB a dB abs abs θθθϕϕϕ-<=⎧⎨-<=⎩(3) 检测计算检测计算是在计算目标回波功率、噪声功率、干扰功率的基础上,设定合适的门限电平通过雷达检测方程得到检测概率和虚警概率。
虚警概率是指仅有噪声存在时,噪声包络超过门限T V 的概率,用公式可表示为:()22exp /2fa T n P V σ=-而检测概率是指有目标存在时,目标加噪声幅度超过门限的概率,用公式可表示为:220222exp 2T d V n n n rr A rA P I dr σσσ∞⎛⎫⎛⎫+=- ⎪ ⎪⎝⎭⎝⎭⎰ 式中,A 为目标回波的幅度, 0()I ⋅为零阶贝塞尔函数。
3.3数据处理模块雷达数据处理模块主要是进行多目标的跟踪处理,具体包括航迹起始、航迹关联,航迹质量管理,以及航迹的滤波预测。
(1)航迹起始以及航迹管理航迹起始方法:对于每一帧中,没有与任何航迹相关的点迹,均起始一条暂时航迹,其航迹质量为1(航迹质量共有0,1,2,3四个等级,质量为0时航迹终止)。
①以暂时航迹的第一点为中心P 1,V m T (T 为雷达的扫描周期)为相关门的半径,如果下一个扫描周期雷达在此区域观测到新的点迹P 2,则形成暂时航迹的第二点,航迹质量升为2,否则,航迹质量变为0,删除该暂时航迹,新得到的点迹重新注册一条暂时航迹。
②在获得P 1, P 2两点后,利用两点的数据,形成暂时航迹的状态估计,并对第三点进行预测,以预测点P 3,为中心。
如果有新的点迹落入此关联门,航迹质量升为3,该暂时航迹得到确认,转化为可靠航迹。
③如果没有点迹落入,则外推一个点再做预测,关联逻辑同上,若有观测值满足要求,则该航迹得到确认,转化为可靠航迹,否则删除该航迹。
航迹质量管理:航迹质量共有0,1,2,3四个等级,当有观测值关联起时,若航迹质量为3,则不变,否则加1,当没有观测值关联起,则航迹质量减1,当质量降为0即删除该航迹。
(2)航迹关联这里采用简单且计算量少的最近邻域相关法,即比较相关门内各个回波的更新向量V(k+1),使范数g(k+1)达到最小者被看作是真实目标的回波。
其中ˆ(1)(1)(1)(1/)v k Z k H k Xk k +=+-++ 1(1)(1)[()(/1)()()](1)T T g k v k H k P k k H k R k v k -+=+-++最近邻域相关法按以下四条判别准则进行关联:(1)若某个航迹门内只有一个观测量,则该航迹与此观测量相关,而不考虑其它。
(2)若某个观测量已落入一个航迹门内,则该观测量与此航迹相关,而不考虑其它。
(3)当某航迹门内含有多个测量时,该航迹与最近的观测量相关。
(4)当某观测量落入多个航迹的门内时,该观测量与最近的航迹相关。
在航迹关联时,当建立滤波器之后,采用椭球形相关门进行相关。
设γ为椭球跟踪门的门限大小,当回波(1)Z k +的范数满足关系式(1)g k +≤γ时,称(1)Z k +为候选回波。
这就是椭球相关门规则。
这里门限γ值取16。
(3)滤波预测考虑到目标可能会机动飞行,因此采用当前比较有效的机动目标跟踪算法交互式多模型(IMM )算法,IMM 算法包含了多个滤波器(各自对应着相应的模型)、一个模型概率估计器、一个交互式作用器(在滤波器的输入端)和一个估计混合器(在滤波器的输出端),多模型通过交互作用跟踪一个目标的机动运动。
本系统中滤波器采用三个模型,第一个为非机动(匀速运动)模型,第二个和第三个都为机动(匀加速运动)模型,状态矢量和观测值均在在地心直角坐标系下表示。
子滤波器采用Kalman 滤波器,4 运行效果图4中,是以雷达为坐标圆心绘制雷达的探测坐标(即目标距离雷达的距离、方位二维信息)。