测斜仪的设计与实现
钻孔桩测斜仪的研制与应用

钻孔桩测斜仪的研制与应用王春生(河南黄河河务局,河南郑州 450003)摘 要:在砼钻孔桩施工中,砼桩的/垂直度0是保证桩质量的重要指标。
施工中不易控制,常常出现斜桩,影响工程质量。
钻孔桩测斜仪依据铅垂直悬浮原理,通过施工中对井孔的控制,保证砼桩的垂直度达到规范要求。
关键词:钻孔桩斜测仪;研制;应用;垂直度;铅垂直悬浮原理中图分类号:TV553 文献标识码:B 文章编号:1008-486X(2002)04-0023-02收稿日期:2002-01-18作者简介:王春生(1944-),男,河南新郑人,工程师,主要从事水电工程施工及监理工作。
1 工程概况砼灌注桩坝作为一种新型坝已在黄河下游中牟韦滩河道整治工程中首次应用。
中牟韦滩砼灌注桩坝工程钻孔灌注桩坐落在1500m 长的河滩曲线上,曲线半径为3450m,设计钻孔灌注桩1364根,每根桩的直径为0.8m,桩长29m,垂直布置,桩中心距1.1m,桩之间净间距0.3m,设计要求孔斜率小于1%。
工程所在地土质为粉土、粉沙、细沙,12m 以下局部含粉质黏土,对灌注桩造孔有许多不利因素,易发生斜孔、塌孔、断桩等质量通病。
该工程由三家承包商承担施工任务。
2 问题的提出在钻孔初期的施工监理中,发现施工单位对钻孔的垂直度控制不好,而成孔质量的好坏直接影响到砼灌注桩的质量。
因三家承包商都没有检测孔斜的手段和设备,常常因孔斜出现三种情况:(1)下钢筋笼碰壁)))产生砼灌注后部分钢筋不在砼中,或保护层不满足设计要求(5c m)。
(2)在最后一节钢筋笼焊接后(钢筋笼长29m,分三节井口焊接下入井孔),下入井孔过程中出现卡壁、下不到底,不得不把分节焊好的钢筋笼再分节割断拔出,重新下钻扩孔,纠偏后再下笼,有时要反复多次。
三节笼有两个焊接头,每焊接割断一次要用3个小时。
(3)桩与桩之间净间距为0.3m,出现一个斜孔桩就造成相临一棵桩不能按设计深度完成,严重影响施工进度与工程质量。
浅谈测斜仪设计与应用

摘要:文章主要从测斜仪的原理出发,分别简述了测斜仪硬件电路设计,以及系统软件设计,以期为行业提供有效的参考与借鉴。
关键词:测斜仪设计;系统软件设计
一、测斜仪的原理
测斜管通常安装在穿过不稳定土层至下部稳定地层的垂直钻孔内。使用数字垂直活动测斜仪探头,控制电缆,滑轮装置和读数仪来观测测斜管的变形。第一次观测可以建立起测斜管位移的初始断面。其后的观测会显示当地面发生运动时断面位移的变化。观测时,探头从测斜管底部向顶部移动,在半米间距处暂停并进行测量倾斜工作。探头的倾斜度由两支受力平衡的伺服加速度计测量所得。一支加速度计测量测斜管凹槽纵向位置,即测斜仪探头上测轮所在平面的倾斜度。另一支加速度计测量垂直于测轮平面的倾斜度。倾斜度可以转换成侧向位移。对比当前与初始的观测数据,可以确定侧向偏移的变化量,显示出地层所发生的运动位移。绘制偏移的变化量可以得到一个高分辨率的位移断面图。此断面图有助于确定地面运动位移的大小,深度,方向和速率。
图2.1测斜仪硬件系统
针对检测系统的被测对象,选择合适的测量方法和传感器,本系统的检测对象是仪器的倾斜角、方位角和工具面角;根据系统在实际运行环境中对电源的要求,设计合适的电源;设计合适的数据采集方案,并给出具体的软硬件实现,本检测系统的数据采集应当直接在井下完成;数据处理应以井上的计算机为中心,编写上位机软件实现测斜前后的系统控制、数据处理功能。系统的总体功能设计主要包括以下几种功能:
三、系统软件设计
1.系统通信实现
通信过程主要包括参数设置以及数据通信。参数设置是系统进行通信之前必须进行的一步,需要统一上下位机之间的数据帧格式和传输速率。其中最重要的参数主要为-波特率、奇偶校验位、数据位以及停止位。参数设置完成之后就可以进入数据通信阶段。在通信过程中,下位机不断检测来自上位机的数据起始位。在检测到起始位之前,接受设备一直处在停止或空闲位阶段,当接收到下跳沿则表明起始位出现。经过确认之后便开始按数据顿格式对所传输的数据位进行接收,待一个完整的数据倾传输完毕,系统将会去掉停止位,把数据位排列成一个字节,通过校验确认无误表示正确接收一个字符。接收设备将不断重复以上整个过程,直到)硬件系统中,比较常见的电磁干扰主要来自两个方面,其一为外界的强电磁辖射,另外一方面则是系统本身由于电源线所产生的电磁干扰。因此电源线的合理布置是减少系统干扰行之有效的方式之一。首先,系统自身电路干扰的产生是由于电源线与地线之间的环路面积所过大所致,因此应该尽量缩小他们之间的距离来减小干扰。其次,在模数混合电路中,应对他们分开供电,这样同样能够减少干扰。更重要的一点,数字电源和模拟电源应分幵放置,避免相互重叠,这样就不会有親合电容产生,保证了系统分离度。最后,芯片的电源和地之间应釆用0.1/^电容进行去親,去親电容应靠近芯片傳接,同时要尽量减小去稱回路面积。(2)地线的布局;地线是系统工作电路的参考电位,同时对于信号回路还具有低阻抗作用。在进行地线设计布置时应适当加粗线宽,这样既能够保证信号的稳定性,还可以提高抗噪声性能,减少地线噪声对低电平数字电路的影响。对于公共地线,应该尽量将其布置在边缘处,连线时防止闭合,避免电磁感应。通常情况地线所产生的干扰可能会让系统控制核心做出误判断,使之产生误动作;同时,传导和福射也可能因此而发生。因此,通过减小地线阻抗来减小或避免干扰是设计过程中必须考虑的内容。在布局过程中,应具有针对性,根据电源电压的不同将数字地和模拟地分开布置并最终在电源处连接。
倾斜监测仪器的制作方法

本技术公开了一种倾斜监测仪器,包括安装盒、脚螺旋、连接支座、保护筒、连通管、悬浮感应器、水平气泡、电子感应器、数据接收、传送装置、移动电源与气泡固定装置,所述安装盒将仪器安装固定在监测物体上监测物体的变化,所述安装盒上方的电子感应器将测得参数传输到安装盒中的数据接收、传送装置中再通过无线传播至电脑中,本装置用于对建构筑物的倾斜进行监测,操作简单、使用方便、受现场限制条件小,可以大量节省人力、物力和时间,精度能够达到监测要求,有效的预防了仪器雨水渗入的风险,且可按监测对象不同来调整仪器设备材质及大小型号,主要监测仪器装置可重复使用,适用范围广泛。
权利要求书1.一种倾斜监测仪器,包括安装盒(1)、脚螺旋(2)、连接支座(3)、保护筒(4)、连通管(5)、悬浮感应器(6)、水平气泡(7)、电子感应器(8)、数据接收、传送装置(9)、移动电源(10)与气泡固定装置(11),其特征在于:所述安装盒(1)将仪器安装固定在监测物体上监测物体的变化,所述安装盒(1)上方的电子感应器(8)将测得参数传输到安装盒(1)中的数据接收、传送装置(9)中再通过无线传播至电脑中,所述悬浮感应器(6)、电子感应器(8)与数据接收、传送装置(9)均与移动电源(10)电性连接。
2.根据权利要求1所述的一种倾斜监测仪器,其特征在于:所述连通管(5)为一体结构,所述连通管(5)是由两个同样大小、形状的U形管组成,所述连通管(5)上U形管的管口朝上垂直于同一平面、圆弧部位成90°相交,且底部相连通,所述连通管(5)管口处采取两种方式,一种可开盖样式,盖子上预留气孔,一种和管体一体化样式,上方预留气孔。
3.根据权利要求1所述的一种倾斜监测仪器,其特征在于:所述悬浮感应器(6)一共设置有四个,四个所述悬浮感应器(6)分别置于连通管(5)的四个管口内部,所述悬浮感应器(6)的直径略小于连通管(5)内管直径并悬浮于连通管(5)内部液体中。
2测斜仪器及其测斜原理
2测斜仪器及其测斜原理测斜仪是一种用于测量各种工程和建筑物的倾斜角度的仪器。
它的主要原理是基于物体的重力作用和重力线的方向和水平线的夹角。
常见的测斜仪器有两种类型:气泡测斜仪和电子测斜仪。
1.气泡测斜仪气泡测斜仪是一种基于液体的毛细现象测量倾斜角度的仪器。
它包括一个透明的管状物体,内部填充着液体和一个气泡。
当测量的物体倾斜时,重力会使液体流向低处,气泡也会随之位移。
通过观察气泡在液体中的位置,可以确定物体的倾斜角度。
气泡测斜仪的测量精度取决于液体的粘度和管径的大小。
常见的气泡测斜仪有静态气泡测斜仪和动态气泡测斜仪。
静态气泡测斜仪适用于对平面和水平线的测量,而动态气泡测斜仪适用于测量物体在不同角度下的倾斜。
2.电子测斜仪电子测斜仪通过使用电子器件来测量倾斜角度。
它通常由一个传感器和一个显示屏组成。
传感器可以是加速度计、陀螺仪或倾斜传感器。
加速度计是电子测斜仪的常见传感器之一,它可以测量物体在三个轴上的加速度,并通过计算得出倾斜角度。
加速度计是基于牛顿第二定律来工作的,其中物体的加速度与施加在物体上的力成正比。
通过将物体的质量和施加在物体上的力除以加速度,可以得到物体的倾斜角度。
陀螺仪是另一种常见的电子测斜仪传感器。
它是通过测量物体在空间中旋转的速率来测量倾斜角度的。
陀螺仪使用陀螺效应来测量旋转速度,其中陀螺的自转轴保持固定不变,而外部物体旋转时,陀螺会保持在现有的平面上。
倾斜传感器是一种专门用于测量倾斜角度的电子传感器。
它可以通过测量物体在水平方向和垂直方向上的加速度来计算倾斜角度。
传感器中的振射器会受到物体倾斜时的重力变化的影响,由此可以计算出物体的倾斜角度。
总结:测斜仪是一种用于测量物体倾斜角度的仪器。
气泡测斜仪利用液体的毛细现象来测量倾斜角度,而电子测斜仪利用电子传感器来测量倾斜角度。
常见的电子传感器包括加速度计、陀螺仪和倾斜传感器。
这些仪器不仅广泛应用于工程和建筑领域,还被应用于模拟和控制系统中。
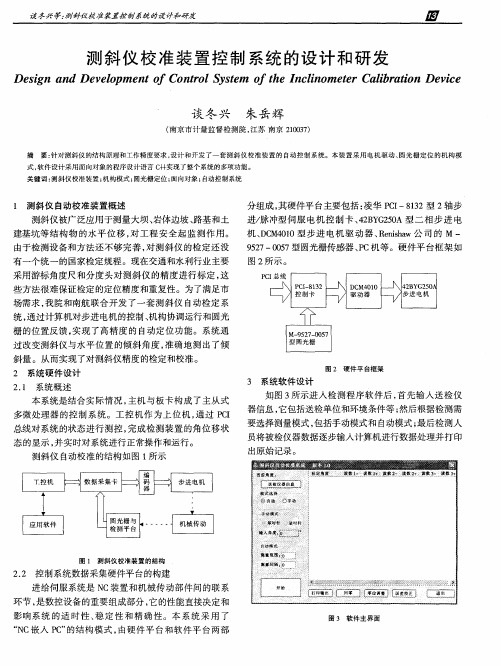
测斜仪校准装置控制系统的设计和研发
耳声发射等测听仪 , 这些听力仪器也须定期送到相关部 门进 行检定 或校 准 。 另一方面 , 的计量检定部 门除应建立 听力计计 相关 量标 准外 , 在条件 成熟 时 还应 建 立 其 他 测 听设 备 的计 量
() 2在检测前可通过合像水平仪或电子水平仪对检
( 下转第 1 页 ) 6
《 计量与淤试技 表》 0 1年 第3 21 8卷 第 1 2期。
号 分析 仪相 连接 , 图 1 示 。仿 真乳 突 主 要用 于 检 定 如 所
最低 声 压 。 由此可 得 当声 压 为 1a时 , 压 级 为 9d , P 声 4 B
一
B C线传输到本装置中的信号分析仪终端。通过传人的 N 电压信号及相关参数 , 系统可准确计算出纯音信号 的声
压级 和频 率 。而 听力计 检定装 置 中骨导 听力零 级检定 的
实质是用仿真乳突的特性来模拟人体头部机械特性。模 拟骨导耳机将放大的声音经由一个振动器传出并刺激神 经使 声音 传 人耳 中的工 作原理 来测 量 和分析 听力计 骨导 听力 零级 的准 确性 。
图 3 软 件 主界 面
《 计量与潮试技 拳》 0 1年第 3 21 8誊 第 1 2期
依 据 测量需 要 工控 机 软 件 自动设 定 的一 系列 数值 , 并 计算 得 到控制 步 进 电机 的相应 脉 冲数 , 过 数据 采 集 通 卡输 出控制 脉 冲到 步 进 电机 控 制器 , 而 控 制 步进 电机 从
l
4 现状 的浅 析
4 1 听力 计 的技术状 态普 遍不好 .
图 1 气 导 听 力 零 级 测 量 连接 图
测斜仪工作原理

测斜仪工作原理
测斜仪是一种用于测量物体的倾斜角度的仪器。
它通常应用于建筑、工程和航空领域中。
测斜仪的工作原理主要基于重力和浮力的平衡。
测斜仪内部通常包含一个气泡管和一个底座。
底座上有一个刻度盘,用于读取仪器指示的倾斜角度。
当测斜仪放置在水平表面上时,气泡会均匀地分布在气泡管内。
当测斜仪被倾斜时,气泡会向离开中心位置的方向移动。
测斜仪的工作原理可以通过浮力和重力之间的平衡来解释。
当测斜仪被倾斜时,气泡在液体中的形状会发生变化,从而改变了气泡所受到的浮力。
与此同时,气泡所受到的重力也会发生变化。
当气泡移动到平衡位置时,浮力和重力相等,仪器此时会指示出物体的倾斜角度。
值得注意的是,测斜仪的精度和准确性取决于气泡管内的液体。
通常使用高粘度的液体,以减少气泡的运动并提高仪器的稳定性。
此外,仪器还应在稳定的环境中使用,避免外部震动和干扰。
总而言之,测斜仪的工作原理是基于重力和浮力之间的平衡。
通过观察气泡在倾斜过程中的移动,可以准确地测量物体的倾斜角度。
测斜仪的原理

测斜仪的原理
测斜仪是一种用于监测土体变形和位移的仪器,它在土木工程、地质工程和矿山工程等领域有着广泛的应用。
测斜仪的原理是基于
光学测量技术和传感器技术,通过测量目标物体的倾斜角度和位移
来判断其变形情况。
本文将介绍测斜仪的原理及其工作过程。
首先,测斜仪通过光学测量技术来实现对目标物体倾斜角度的
测量。
它利用内置的倾斜传感器和光电传感器,通过测量目标物体
与水平线的夹角来确定其倾斜角度。
这些传感器能够高精度地感知
目标物体的倾斜情况,并将测量结果传输给数据采集系统进行处理
和分析。
其次,测斜仪利用传感器技术来实现对目标物体位移的监测。
它通过内置的位移传感器和变形传感器,能够实时监测目标物体的
位移和变形情况。
这些传感器能够将位移和变形数据准确地传输给
数据采集系统,实现对目标物体位移的精确监测和记录。
测斜仪的工作过程可以简单描述为,首先,测斜仪通过内置的
光学测量技术对目标物体的倾斜角度进行测量;然后,利用传感器
技术对目标物体的位移和变形情况进行监测;最后,将测量的数据
传输给数据采集系统进行处理和分析,从而实现对目标物体变形情况的监测和预警。
总之,测斜仪的原理是基于光学测量技术和传感器技术,通过对目标物体的倾斜角度和位移进行测量和监测,实现对其变形情况的准确判断。
测斜仪在工程监测和安全预警中发挥着重要作用,能够有效地保障工程的安全和稳定。
希望本文能够帮助读者更好地理解测斜仪的原理和工作过程,为工程监测提供参考和指导。
倾斜检测设备的制作方法

本技术提供了一种倾斜检测装置。
包括装置本体和设置在装置本体上端的检测槽;检测槽四面设有检测模块;检测模块包括配重机构、倾斜机构和显示模块;配重机构上部铰接在检测槽内壁上;倾斜机构中部铰接在检测槽内壁上,倾斜机构底部与配重机构底部接触;显示模块安装在检测槽上,与倾斜机构上部相对安装,装置本体倾斜时,配重机构推动倾斜机构摆动,使倾斜机构上部与显示模块接触,触发显示模块工作。
本技术通过配重机构的重力调节,触动倾斜机构和显示模块工作,当测量仪器偏移倾斜时,位于低位的倾斜端指示灯亮,可以使工作人员直观看到测量仪器偏移倾斜情况,迅速对仪器姿态进行调整,减少了对测点位置测量的误差影响。
权利要求书1.一种倾斜检测装置,其特征在于,包括装置本体(1)和设置在装置本体(1)上端的检测槽(2);所述检测槽(2)四面设有检测模块(3),用以监测固定安装在装置本体(1)上的仪器的倾斜状态;所述检测模块(3)包括配重机构(3.1)、倾斜机构(3.2)和显示模块(3.3);所述配重机构(3.1)上部铰接在检测槽(2)内壁上;所述倾斜机构(3.2)中部铰接在检测槽(2)内壁上,所述倾斜机构(3.2)底部与配重机构(3.1)底部接触;所述显示模块(3.3)安装在检测槽(2)上,与倾斜机构(3.2)上部相对安装,装置本体(1)倾斜时,配重机构(3.1)推动倾斜机构(3.2)摆动,使倾斜机构(3.2)上部与显示模块(3.3)接触,触发显示模块(3.3)工作。
2.根据权利要求1所述的一种倾斜检测装置,其特征在于,所述配重机构(3.1)包括转轴(3.1.1)、配重块(3.1.2)和连接杆(3.1.3);所述转轴(3.1.1)两端固定安装在检测槽(2)内壁上;所述连接杆(3.1.3)顶部与转轴(3.1.1)铰接,所述连接杆(3.1.3)底部与配重块(3.1.2)连接;所述配重块(3.1.2)一侧面与倾斜机构(3.2)接触。
3.根据权利要求2所述的一种倾斜检测装置,其特征在于,所述配重块(3.1.2)的截面为矩形。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2009年 第7期 物流工程与管理第31卷 总第181期 LOGISTICS ENGINEERING AND MANAGEMENT【收稿日期】2009-06-28 【作者简介】胡立强(1978-),男,硕士,助教,研究方向:嵌入式在自动化中应用。
・物流技术・ 测斜仪的设计与实现□ 胡立强,闫德立,石彦辉,何朝峰(石家庄铁道学院,河北 石家庄 050043)【摘 要】测斜仪是一种能有效的精确地测量土层内部水平位移或变形的工程检测仪器,应用其工作原理同样可以检测临时或永久性地下结构(如桩、连续墙、沉井等)周壁的深层次水平位移及倾斜角度。
文中介绍了该仪器的工作原理、组成模块及各机构之间的相互联系。
【关键词】测斜仪;水平位移;地下结构【中图分类号】 TP206+1 【文献标识码】 b 【文章编号】 1674-4993(2009)07-0062-02Design and Realization of Clinoretee□ HU Li-qiang, YAN De-li, SHI Yan-hui, HE Chao-feng(Shijiazhuang Railway Institute, Shijiazhuang 050043,China)【Abstract】Clinoretee is a kind of effective accurately measuring soil horizontal displacement or inside. According the principle of its work,it can also be temporary or permanent detection of underground structure (such as pile, continuous wall, open caisson, etc.) weeks of the wall and the Angle displacement of deep level. This paper introduces the working principle and composition of the instrument module and the relationship between agencies.【Key words】Clinoretee;Horizontal displacement;Underground structure1 引言测斜技术是确定物体在空间的倾斜和倾向的专门技术,它应用于空间飞行器的惯性测量系统、岩体倾向判断、土程钻孔轨迹监测等许多方面。
若在岩体上使用,一般选取岩体表面以下一定深度的位置作为相对稳定点,每隔一定距离观测该段岩体的倾斜度变化,从而推算得到水平位移,并最终可得到每个测点相对于稳定点的水平位移,及早地了解深层岩体的运行变化状况,掌握边坡岩体的内在运行形态,如发现异常,即可采取有效措施。
2 测斜仪的工作原理测斜仪的测斜原理是通过测头传感器加速度计测量重力矢量g 在测头轴线垂直而上的分量大小,确定测头轴线相对水平的倾斜角,据此计算出测头相对水平面的垂直位移。
当测头处于竖直状态时,测头中的传感器处于零位,石英饶性伺服加速度计的敏感轴处于水平状态,矢量g 在感敏轴上的投影为零,此时的加速度计输出值为零,称为零偏,一般情况下零偏总是存在的。
当加速度计与水平面存在一倾角度时,加速度计输出一个电压信号:01sin k g k U out +=θ。
测量时,当测头在测斜导管内自下而上以一定间距(可设定0.5 m)逐段滑动测量时,测头内的传感器敏感地反映出测斜导管在每一深度处的倾斜角度变化,从而得到测斜导管每段连续变化的水平位移增量∆i,即∆i=L sin θ,式中L 为测点间距,把每段的水平位移增量自下而上逐段累加,便得到不同深度及孔口的总位移量δi=∆i =∑θsin L 。
测斜仪经过单片机控制模块分析及处理,直接在液晶屏上显示被测点的水平位移量值∆x 和倾角θ变化量。
3 硬件设计测斜仪系统以单片机为控制核心,以相应的传感器为测试手段,以A/D 转换器作为模数转换的工具,以显示器件进行相关参数显示,以相应的通信手段搭建起单片机与计算机的桥梁,最终实现基于单片机的高精度测斜仪系统。
3.1 系统硬件的总体结构根据随钻测斜仪的数学模型及测试功能,整个系统可以划分为四部分:A/D 数据采集,单片机控制,液晶显示和计算机,如图1所示。
A/D 部分实现对七路传感器模拟信号的采集与数字转换。
单片机部分为整个系统的核心,控制A/D 进行数据采集,对采集信号进行处理,控制液晶显示,并通过RS232与计算机通信。
图1 测斜系统框图3.2 主板电路的设计主板电路以89C51单片机为控制中心,实现了将测量采集到的信号数据进行A/D 转换后,输入到单片微控制器中第7期 胡立强等:测斜仪的设计与实现 63进行数据处理,然后输出信号,对小直流电机的正反转控制,测量设定及液晶显示,同时设有对系统进行复位控制及低电压检测电路,信号存储电路,串行实时时钟电路,光电耦合电路,起振电路及DC-DC电压转换电路等部分。
A/D转换:单片机对MAXIM公司生产的ICL7135转换器的设置,完成数据采集过程以及数据采集方式的控制,实现对外部所感测模拟量(电压信号)的采集。
4 系统软件的总体结构软件设计包括下位机与上位机的设计。
控制功能由下位机实现,上位机进行数据的传输与显示,数据的传输机制应遵循可靠和易维护这个原则。
4.1 下位机软件设计在编写单片机应用系统程序时,更着重于程序本身的编写效率,改善程序的可读性和可移植性,我们采用高级语言C语言编程。
C语言是一种源于UNIX操作系统的语言,它是一种结构化语言,可以产生紧凑的代码,而且开发出的系统易于维护,可靠性高,可移植性好。
uVision2支持所有的Keil 8051工具,包括C编译器,宏汇编器,连接/定位器,目标代码到HEX的转换器。
C51是一个杰出的优化编译器,已通过很多步骤以确保产生的代码是最有效率的(最小和/或最快)。
编译器通过分析初步的代码产生最终的最有效率的代码序列,在运行效率和速度上可以和汇编程序得到的代码相媲美。
下位机软件采用模块化的设计思想,由数据采集模块、软件滤波模块、LCD液晶显示模块、与上位机通信模块等组成。
4.2 上位机软件设计本系统采用的是PC机和单片机组成的上下位机系统,上下位机之间通过串口进行通信。
在VC6.0环境下开发上位机程序。
利用VC提供的Active X控件Microsoft Communication Control(简称MSComm控件)编写的上位机控制程序,完成了89C51单片机和PC机之间的RS232串行通讯,达到了实际要求。
应用软件的工作主要是通过232接口把二进制数据采集、分析,保存数据、打印数据。
EXCEL 作为数据储存介质。
4.3 事件驱动法程序编写过程如下①打开vc++6.0集成开发环境,首先建立一个基于对话框的MFC应用程序“高精度随钻测斜仪系统”,在设置项目选项时必须选上ActiveX Controls,其他的按缺省值设置。
②选择Project菜单下面的Add To Project子菜单中的Components and controls选项,在弹出的对话框中双击Registered ActiveX Controls项,在出现的注册过的ActiveX控件列表中,选择Microsoft Communications Control, version 6.0,单击Insert按钮将其插入到Project 中,接受缺省的选项。
这时生成一个名为CMSComm的C++类,并且在对话框编辑器里将出现MSComm控件图标。
③打开Class Wizard在Member Variables选项卡,选择类CMyDIg,为IDC MSCOMMI添加控制变量m-ctrlComm。
③打开Class Wizard在Message Maps选项卡中,选择类CMyDIg,选择IDC MSCOMMI,为其添加串口事件消息处理函数OnComm()。
这个函数是用来处理串口消息事件的。
每当串口接收到数据,就会产生一个串口接收缓冲区中有字符的消息事件,函数OnComm()就会执行。
在OnComm()函数中,添加所需要的代码。
④打开串口,并且设置串口参数。
在主对话框的CMyD1g::OnInitDialog()添加初始化串口代码。
⑤当发生串口事件时,系统会调用串口事件处理函数OnComm。
⑥在主对话框中添加其他控件并编写程序代码,实现端口选择、通信、测量、退出、显示等功能,主要显示井斜、方位、高边工具面、磁性工具面、温度等参数。
5 测斜仪监测测试过程及其应用首先将测斜仪置入测斜管内,要使导向轮完全进入导向槽内。
方向应为导向轮的正向与被测位移坐标(+ X)的正向一致时测值为正,相反为负。
然后根据电缆上标明的记号,每基本长度测读一次测斜管轴线相对基准轴线的倾角。
测试方式应遵循下面要点:当测斜管下部可靠固定在基岩中(埋入深度应大于5000mm),可认定基岩没有位移。
此时-测量可至下而上测读一次,直至管口;当测斜管底部悬挂(底部未与基岩固定),此时测量应由上至下进行测量。
根据测斜仪的参数和有关计算公式编制计算机程序,监2。
图2 计算机程序流程图[参考文献][1] 李燕东.钻孔测斜仪及其在边坡上的应用[J].人民长江,1994.[2]CraigJ.J.Simulation-basedrobotcelldesigninAdeptRapid.RoboticsandAutomation.IEEEInternationa1.1997.[3] 李番军.连续测斜仪研究[D]. 哈尔滨:哈尔滨工业大学,2006.[4] 龚晓南,赵荣欣,李永葆,等.测斜仪自动数据采集及处理系统的研制[M].杭州:浙江大学出版社(自然科学版),1999,(3).[5] 王文军.DGT-1自动测斜仪的研究开发[D].吉林大学,2005.。