matlab电路仿真
matlab电路仿真教程
matlab电路仿真教程Matlab是一种功能强大的软件,用于进行电路仿真和分析。
通过Matlab,用户可以轻松地进行电路分析、验证和优化。
在本教程中,我将介绍如何使用Matlab进行电路仿真,并提供一些实例来帮助您更好地理解。
首先,我们需要了解Matlab中的电路仿真工具。
Matlab提供了许多函数和工具箱,用于电路建模和仿真。
其中最常用的是Simulink和Circuits工具箱。
Simulink是一个可视化的仿真环境,用于建立和模拟电路系统。
Circuits工具箱则提供了一些基本电路元件和函数,用于电路建模和分析。
要开始使用Matlab进行电路仿真,首先需要安装Matlab和Simulink软件,并确保您具有有效的许可证。
然后,打开Matlab并导航到Simulink库。
在Simulink库中,您将找到许多电路元件,例如电阻器、电容器和电感器,以及电压源和电流源。
将合适的元件拖放到工作区域中,然后连接它们以构建您的电路。
在电路建模完成后,您需要为电路设置适当的参数。
例如,您可以指定电阻、电容和电感的值,以及电压源和电流源的值。
您还可以添加信号源和观察点,以便在仿真期间监视电路的行为。
一旦您完成了电路建模和参数设置,接下来就可以对其进行仿真了。
在Simulink工具箱中,有几种不同类型的仿真可用,例如时域仿真和频域仿真。
通过选择合适的仿真类型,并设置仿真时间和步长,您可以开始执行仿真并观察电路的响应。
在仿真完成后,您可以使用Matlab绘图工具箱中的一些函数来绘制和分析电路响应。
例如,您可以绘制电压随时间的变化曲线,或者计算电源输出和负载电流之间的关系。
通过使用Matlab的分析工具,您还可以进行降阶、优化和参数估计等进一步分析。
让我们通过一个简单的示例来说明如何使用Matlab进行电路仿真。
假设我们有一个简单的RC电路,其中包括一个电阻器和一个电容器。
我们想要了解电容器的电压如何随时间变化。
matlab电路仿真教程

在MATLAB窗口的工具栏中单击
图标
在命令窗口中输入命令: >>simulink
2. Simulink浏览器
标题栏 菜单栏 工具栏 模块说明框
基本模块库
已安装专用 模块库
模块查找框 模块显示框
Simulink基本模块库包括8类子库 : Continuous(连续模块) Discrete(离散模块) Function&Tables(函数和平台模块) Math(数学模块) Nonlinear(非线性模块) Signals&Systems(信号和系统模块) Sinks(接收器模块) Sources(输入源模块)
基于MATLAB/Simulink的直流电路仿真分析
电路如图所示,参数如下:R1=2,R2=4,R3=12,R4=4,R5=12,R6=4, R7=2,Us=10V。求i3,U4,U7;
仿真结果
(2)启动仿真
启动方式: (1) Simulink模块编辑窗口菜单栏“ Simulation /Start” (2)单击工具栏上的 图标
举例说明 Sim6_1.mdl
三、Simulink常用模块介绍
在模块浏览器中的Simulink节点下包含了搭建一个Simulink模块所 需要的基本模块。本节主要对其中的Sources模块库、Sinks 模块库、 Simpower systeems模块库中的常用模块进行介绍。
输入已有的函数作为仿真的激励信号。首先要在MATLAB环境下建立一
个时间向量和相应的函数值向量,然后将时间向量和函数值向量的名称
[T, U]填入该图标的对话框中。
Sinks模块
Sinks模块库中的模块主要功能是接受信号,并且将接受的信号显示出来。
整流电路matlab仿真
实验一:单相桥式全控整流电路的性能研究一、实验目的1.加深理解单相桥式全控整流电路的工作原理2.研究单相桥式变流电路整流的全过程3.掌握单相桥式全控整流电路MATLAB的仿真方法,会设置各模块的参数。
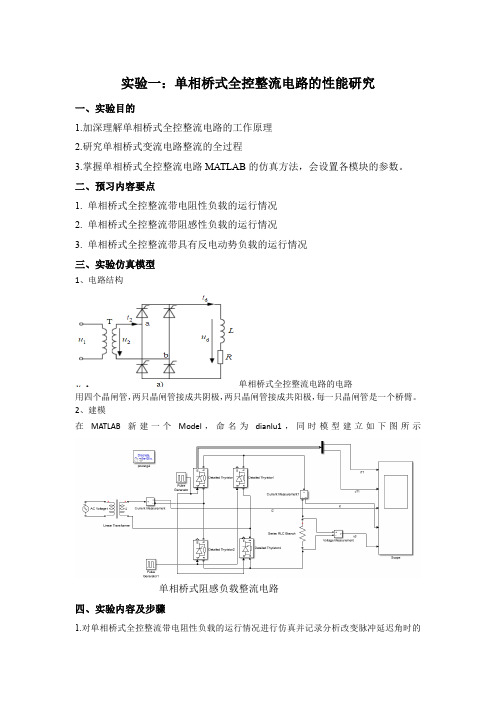
二、预习内容要点1. 单相桥式全控整流带电阻性负载的运行情况2. 单相桥式全控整流带阻感性负载的运行情况3. 单相桥式全控整流带具有反电动势负载的运行情况三、实验仿真模型1、电路结构单相桥式全控整流电路的电路用四个晶闸管,两只晶闸管接成共阴极,两只晶闸管接成共阳极,每一只晶闸管是一个桥臂。
2、建模在MATLAB新建一个Model,命名为dianlu1,同时模型建立如下图所示单相桥式阻感负载整流电路四、实验内容及步骤1.对单相桥式全控整流带电阻性负载的运行情况进行仿真并记录分析改变脉冲延迟角时的波形(至少3组)。
以延迟角30°为例(1)器件的查找以下器件均是在MATLAB R2014a环境下查找的,其他版本类似。
有些常用的器件比如示波器、脉冲信号等可以在库下的Sinks、Sources中查找;其他一些器件可以搜索查找(2)连接说明有时查找出来的器件属性并不是我们想要的例如:变压器可以双击变压器进入属性后,取消three windings transformer就是单相变压器。
(3)参数设置1.双击交流电源把电压设置为220V,频率为50Hz;2.双击脉冲把周期设为0.02s,占空比设为10%,延迟角设为30度,由于属性里的单位为秒,故把其转换为秒即,30×0.02/360;3.双击负载把电阻设为20Ω,电感设为0.1H;4.双击示波器把Number of axes设为5,同时把History选项卡下的Limit data points to last 前面的对勾去掉;5.晶闸管参数保持默认即可(4)仿真波形及分析1.当供电给纯电阻负载a.触发角α=0°c. α=90°从图中可以看出输出电压Ud的电压波形相对延迟角为30度时的波形向后推迟了,同理可以得出输出电压Ud的平均值变小了。
matlab电路仿真报告
matlab电路仿真报告一. 仿真背景和目的在电路设计和验证过程中,电路仿真技术是非常重要的。
Matlab这一强大的仿真软件,可快速有效地在仿真环境中进行电路设计验证,确保电路设计在实际应用中的可靠性和稳定性。
二. 仿真内容介绍本次仿真实验主要涉及四个方面的内容:交流电路、直流电路、半导体器件、功率放大器。
1. 交流电路仿真交流电路仿真是电路设计的基础。
本次仿真实验中,我们构建了简单的交流电路,通过仿真计算得到了交流电流、交流电压以及电路功率等参数。
2. 直流电路仿真直流电路仿真实验中,我们建立了稳定的直流电源和直流电路,在仿真环境中模拟了直流电路的工作状态,包括电流、电压、功率等参数。
通过仿真结果可以得到直流电路的性能评估。
3. 半导体器件仿真半导体器件在现代电子电路中广泛应用。
本次仿真中,我们针对开关电路的应用设计了半导体管,通过仿真计算得到了开关电路在不同工作状态下的输出特性,包括开关电压、开通电流等。
4. 功率放大器仿真功率放大器是实际应用中常见的一种电路结构。
仿真实验中,我们设计了基本的功率放大器电路,在仿真环境中计算得到了频率响应、增益、输出功率等参数,用于评估该功率放大器的性能和稳定性。
三. 仿真结果分析通过仿真计算和实验结果分析,可以得出以下几点结论:1. 交流电路仿真结果表明,输入交流电源的电流和电压随时间变化而变化,同时可以计算得到电路的功率和电阻等参数。
2. 直流电路仿真结果表明,直流电路的电流和电压稳定,可以计算得到直流电路的电流、电压和功率等参数。
3. 半导体器件仿真结果表明,半导体器件可以有效地用于开关电路应用,可以计算得到器件的开通电流、开关电压等参数。
4. 功率放大器仿真结果表明,功率放大器可以在一定的频率范围内实现较大的增益和输出功率。
同时,该电路还具有一定的稳定性和可靠性。
四. 总结和展望通过对电路仿真实验的分析和总结,我们可以发现,电路仿真技术在电路设计和验证过程中具有不可替代的作用。
MATLAB电路仿真

(3) 编写MATLAB 仿真程序或建立Simulink 模块方框图, 调试并运行程序。
(4)得出数值解,即仿真结果,对仿真结果进行分析,以 确定结果的可靠性和有效性。
20:24 5
第5周 MATLAB电路仿真
R + f(t ) -
L
i L(t ) + C u C(t ) -
图2-2 一个二阶电路系统
function in=f(t) %输入信号
in=(t>0)*1;%阶跃信号
20:24
10
第5周 MATLAB电路仿真 然后,利用 MATLAB 提供的求解微分方程的指令对 该微分方程组求解。 MATLAB 提供的求解微分方程的算 法有多个,如“ode45”、“ode23” 、“ ode15s” 等,不同 的算法适用的场合稍有不同。例如,通过“ ode45” 函数 求解,MATLAB程序(程序名为ex123.m)如下: 程序2-4 %filename ex123.m L=1;%电感值
%矩阵初始化
xdot(1)=-R/L*x(1)-1/L*x(2)+1/L*f(t);%方程1 xdot(2)=1/C*x(1);%方程2
function in=f(t)%输入信号
in=(t>0)*1;%信号阶跃 而ex123.m的“ode45”语句中仍然将系统状态改为[0,1]。 20:24 18 运行后得到的波形仿真结果如图 2-5所示。
20:24 15
第5周 MATLAB电路仿真 text(0.9,0.07,′\leftarrowi-L(t)′);grid; figure(2);plot(t,x(:,2));holdon;xlabel(′timesec′);
text(0.5,0.3,′\leftarrowu-C(t)′);grid;
基于Matlab的电路实时仿真平台设计与实现

基于Matlab的电路实时仿真平台设计与实现基于Matlab的电路实时仿真平台设计与实现一、引言电路仿真是电子工程领域中重要的工具之一,在电子电路设计过程中起着至关重要的作用。
而基于Matlab的电路实时仿真平台则是利用Matlab软件对电路进行仿真实验的重要应用之一。
本文将介绍基于Matlab的电路实时仿真平台的设计与实现过程。
二、电路仿真平台的设计与实现1. 平台功能需求分析基于Matlab的电路实时仿真平台的设计与实现主要包含以下功能需求:(1)电路建模:能够支持电路元件的建模以及电路的连接和布线。
(2)仿真参数设置:能够设置仿真的时间范围、步长等参数。
(3)仿真结果分析:能够实时显示电路中各个元件的电压、电流、功率等参数,并提供结果分析的功能。
(4)实验控制:能够控制实验的开始、暂停、恢复、停止等操作。
(5)数据记录与导出:能够记录仿真实验过程中的数据,并支持数据导出为Excel或其他格式。
2. 平台设计与实现基于以上功能需求,我们设计了一套基于Matlab的电路实时仿真平台。
平台的实现主要分为以下几个模块:(1)电路建模模块:利用Matlab提供的图形用户界面工具,搭建了一个电路建模界面。
用户可以通过该界面选择电路元件,并将元件进行连线和布线,从而实现电路的建模。
在建模过程中,用户还可以设置元件的参数和初始条件。
(2)仿真参数设置模块:通过设定仿真的时间范围、步长等参数,用户可以对仿真实验进行灵活的配置,以满足不同的需求。
(3)仿真运行模块:在完成电路建模和参数设置后,用户可以点击“运行”按钮,开始进行仿真实验。
平台利用Matlab强大的计算能力,根据电路模型和仿真参数进行实时的仿真计算,并实时绘制出电路中各个元件的电压、电流曲线等。
用户可以通过切换窗口或界面,实时观察仿真结果。
(4)实验控制模块:平台提供了开始、暂停、恢复、停止等操作按钮,用户可以根据需要自由控制仿真实验的进行。
例如,在观察到关键数据点时,用户可以暂停仿真实验,通过对元件参数的调整,进一步优化电路设计。
matlab电路仿真教程

三、Simulink常用模块介绍
在模块浏览器中的Simulink节点下包含了搭建一个Simulink模块所 需要的基本模块。本节主要对其中的Sources模块库、Sinks 模块库、 Simpower systeems模块库中的常用模块进行介绍。
Sources 模块
阶跃函数,起始时间是第1秒而非0秒。双击step模块,对仿真起始时间(step time)和阶跃
正弦波,电路中常用到的正弦信号(Sine Wave)模块,双击图标,在弹出的窗口中
调整相关参数。信号生成方式有两种:Time based 和 Sample based 。
从工作空间输入。从MATLAB Workspace输入已有的函数作为仿真的激
励信号。首先要在MATLAB环境下建立一个时间向量和相应的函数值向量,然后将时间向量和函数值
matlab电路仿真教程
1
Simulink简介
一、Simulink窗口环境 1. 启动Simulink
在MATLAB窗口的工具栏中单击 图标 在命令窗口中输入命令: >>simulink
2. Simulink浏览器 标题栏 菜单栏 工具栏 模块说明框
基本模块库
已安装专用 模块库
模块查找框 模块显示框
SimPower Systems模块
DC Voltage Source直流电压源,在 “Electrical Sources”模块内. Series RLC Branch 串联RLC 支路,设置参数可以去掉任一元件,将其变为单独的电阻、电容或电感 的支路。 将Series RLC Branch 模块设置成单一电阻时,应将参数:“Resistance”设 为所仿真电阻的真实值, “Inductance”设置为0,“Capacitance”设置为inf; 将Series -RLC Branch模块设置单一电感时,应将参数:“Inductance”设置为所仿真电感的真实值, “Resistance”设置为0,“Capacitance”设置为inf; 将Series RLC Branch设置单一电容时,应将参ห้องสมุดไป่ตู้: “Capacitance”设置为所仿真电感的真实值, “Resistance”和“Inductance”均设置为0。
matlab在电路分析和仿真中的应用

MATLAB/SIMULNK的主要产品及其相互关系
2024/7/15
MATLAB的优点
• 1. 容易使用 • 2. 可以由多种操作系统支持 • 3. 丰富的内部函数 • 4. 强大的图形和符号功能 • 5. 可以自动选择算法 • 6. 与其他软件和语言有良好的对接性
2024/7/15
2024/7/15
Matlab 的安装
2 输入名字和公司名称 3 在第三个空白处(PLP)输入软件的序列号sn 4 继续安装,直到安装完成。
2024/7/15
5 安装帮助 将安装目录中的help文件夹替换为安装包中的 help文件夹
MATLAB 7用户界面概述
MATLAB 7的用户界 面主要包括以下三个 方面的内容: • MATLAB 7的主菜单 • MATLAB 7的工具栏 • MATLAB 7的窗口
matlab自定义的函数文件称内置函数文件
调用内置函数的方法:使用函数名并给出相应的入 口、出口参数即可。
例如:sin.m函数——用type sin查不到。
调用格式:y=sin(2*x)
1
实际应用中:
0.8
x=0:2*pi/180:2*pi;
0.6
y=sin(2*x)
0.4
0.2
plot(x,y)
0
-0.2
2024/7/15
-0.4
-0.6
取R=255欧,L=125uH,C=6800pF,则:
H (s)
sRC s2LC sRC
1
85s2
1734000s 1734000s
1014
m文件如下: % LCR串联谐振电路 R=255; L=125*10^(-6); C=6800*10^(-12);
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
C2 F Th e rm o sta t Ce lsiu s to Fa h re n he it
Indoor v s . Outdoor Te m p.
Note: model files are ASCII, so they can be opened by any text editor, or sent easily to other platforms.
ME 379M/397 Vehicle System Dynamics and Controls
Hale Waihona Puke Department of Mechanical Engineering The University of Texas at Austin
What’s in the house?
The models are formulated from a set of basic block diagram elements. These can be “grouped” into subsystems, building a multilevel model.
The Simulink environment provides a way to piece together basic elements with “algebraic” elements (e.g., summers), and there are “calculus” functions as well. The physics can either be diagrammed or embedded in function calls.
ME 379M/397 Vehicle System Dynamics and Controls
Other demos
Department of Mechanical Engineering The University of Texas at Austin
Block Diagrams for Computer Simulation: Not a new idea.
Modeling and Simulation of using Matlab/Simulink
Modeling Building and Simulation with Simulink
Updated for Spring 2001
Raul G. Longoria University of Texas at Austin Department of Mechanical Engineering
To sta rt a n d stop th e sim u la tion , u se the "S ta rt" se le ction in th e "S im ula tio n" pu ll-d own m e n u
Note: this model file pre-loads thermdat.m to set parameters.
The block diagram descriptions F.D. Ezekiel and H.M. Paynter, “Computer Representations of are effective for modeling Engineering Systems Involving Fluid Transients,” Trans. ASME, Nov. 1957. dynamic system models. Example elements: Σ = summer Π = product ∫ = integrator Φ = function (nonlinear type)
The University of Texas at Austin
algebra
Simulink Description
• Models are hierarchical. Model detail can be viewed by “diving into” blocks. • The block diagram describes the equations, and possibly the interconnection of components. • You can simulate the model choosing from several integration methods. • Analysis can be conducted in Simulink or from the MATLAB command window. It depends on whether an interactive or batch mode is desired. • Display functions are available for direct plotting (while simulation runs). • The simulation results can also be “sent” to the workspace for postprocessing and visualization using the MATLAB graphical tools. • There are many analysis tools available, and since Simulink is integrated into MATLAB, you can simulate, analyze, and revise models in either environment at any point.
– review available solvers – trim
• Tutorials:
– PMDC motor – Angular drive coil
Goal: Feel comfortable building and analyzing basic models in Simulink.
ME 379M/397 Vehicle System Dynamics and Controls Department of Mechanical Engineering The University of Texas at Austin
ME 379M/397 Vehicle System Dynamics and Controls
Department of Mechanical Engineering The University of Texas at Austin
Starting Simulink
• Simulink can be ‘launched’ from the command line: Open a model » simulink Create • Or, use the menu bar • The model browser opens • *.mdl is the extension used for Simulink models
ME 379M/397 Vehicle System Dynamics and Controls Department of Mechanical Engineering The University of Texas at Austin
ME 379M/397 Vehicle System Dynamics and Controls
a new model
Department of Mechanical Engineering The University of Texas at Austin
House Demo
Open: MATLABR11\toolbox\simulink\simdemos thermo.mdl
1 /s co st
He a t C os t ($)
70
F2 C
Te rr
blowe r cmd
he a te r QDot
Mdo t*h a He a te r Blowe r Ho use F2C Fa h re n he it to Ce lsius
Tin
Do lla r Ga in
S e t P oin t Fa hre n he it to Ce lsius
ME 379M/397 Vehicle System Dynamics and Controls Department of Mechanical Engineering The University of Texas at Austin
What is to be gained?
• Quicker modeling • Better communication • Modularity - can connect subsystems together to make more complex models
ME 379M/397 Vehicle System Dynamics and Controls
Department of Mechanical Engineering The University of Texas at Austin
Outline for Today
• Quick Intro/Demo • Physical modeling with block diagrams • Simulink modeling tools and features • Analysis Tools in Simulink
Numerical integrators
= − x + u (t ) x
ME 379M/397 Vehicle System Dynamics and Controls
1 u (t) s Inte g ra to r S co p e
e.g., u(t) = step