第十四次课 陀螺仪表
陀螺仪表

上一页 下一页 返回
5.1 陀螺的基本知识
当三自由度陀螺转子高速旋转后, 若不受外力矩的作用, 不管基座如何转 动, 支撑在万向支架上的陀螺仪自转轴指向惯性空间的方位不变, 这种特 性叫定轴性, 如图5.1 -4 所示。上述现象, 如果以地球为基准, 则可以认 为三自由度陀螺相对于地球运动, 这种运动称为陀螺的假视运动或视在 运动。
(2) 进动的特点。 ①运动不是发生在力矩作用的方向, 而是发生在和它垂直的方向; 非陀螺
体发生在力矩作用的方向。 ②进动角速度在动量矩一定时, 对应一个外力矩只有一个进动角速度; 非
陀螺体角速度则不断变化。 ③外力矩停止作用时, 进动立即停止; 非陀螺体则要做惯性运动, 继续运
动下去。
上一页 下一页 返回
陀螺, 称为三自由度陀螺, 如图5.1 -2 所示。转子是一个对称的飞轮, 可 以高速旋转, 其旋转轴称为自转轴, 旋转角速度称为自转角速度, 内框(内 环或陀螺房) 可以绕内框轴相对外框(外环) 自由旋转, 外框又可以绕外框 轴相对支架自由转动。这两种转动角速度都称为牵连角速度。
上一页 下一页 返回
2.二自由度陀螺 有转子和内框, 且转子只能绕两个互相垂直的轴自由旋转的陀螺, 称为
二自由度陀螺, 如图5.1 -3 所示。
上一页 下一页 返回
5.1 陀螺的基本知识
5.1.2陀螺的基本特性
1.三自由度陀螺的基本特性 三自由度陀螺主要有两个基本特性: 稳定性、进动性。 1) 稳定性 三自由度陀螺保持其自转轴(或动量矩矢量) 在空间的方向不发生变化的
进动角速度棕的方向取决于转子动量矩H 和外力矩M 的方向。外加力矩 沿陀螺自转方向转动900, 即为进动角速度(ω) 的矢量方向。或者用右手 定则记忆, 从动量矩H 沿最短路径握向外力矩M 的右手旋进方向, 即为进 动角速度方向。
航空陀螺仪
航空陀螺仪一、陀螺仪的基本知识陀螺玩具旋转时,能够直立在地上;而且转得愈快,立得也愈稳;即使给它一个冲击,也只是晃动而不会倒下。
陀螺的这种特性可以被利用来做成仪表用来测量飞机的姿态角、航向角和角速度。
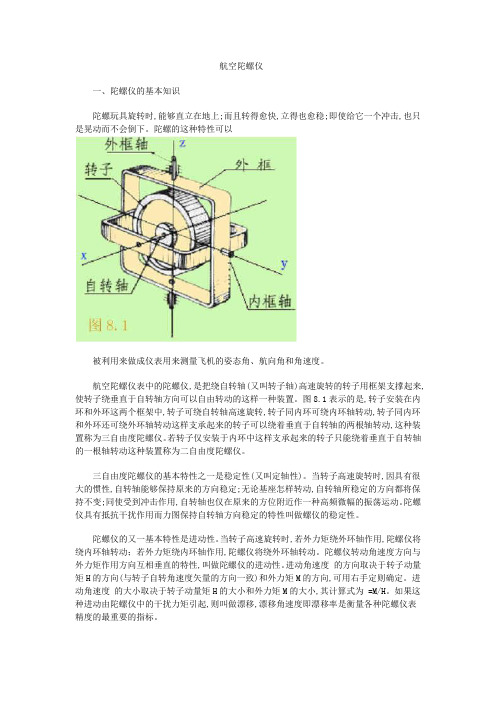
航空陀螺仪表中的陀螺仪,是把绕自转轴(又叫转子轴)高速旋转的转子用框架支撑起来,使转子绕垂直于自转轴方向可以自由转动的这样一种装置。
图8.1表示的是,转子安装在内环和外环这两个框架中,转子可绕自转轴高速旋转,转子同内环可绕内环轴转动,转子同内环和外环还可绕外环轴转动这样支承起来的转子可以绕着垂直于自转轴的两根轴转动,这种装置称为三自由度陀螺仪。
若转子仅安装于内环中这样支承起来的转子只能绕着垂直于自转轴的一根轴转动这种装置称为二自由度陀螺仪。
三自由度陀螺仪的基本特性之一是稳定性(又叫定轴性)。
当转子高速旋转时,因具有很大的惯性,自转轴能够保持原来的方向稳定;无论基座怎样转动,自转轴所稳定的方向都将保持不变;同使受到冲击作用,自转轴也仅在原来的方位附近作一种高频微幅的振荡运动。
陀螺仪具有抵抗干扰作用而力图保持自转轴方向稳定的特性叫做螺仪的稳定性。
陀螺仪的又一基本特性是进动性。
当转子高速旋转时,若外力矩绕外环轴作用,陀螺仪将绕内环轴转动;若外力矩绕内环轴作用,陀螺仪将绕外环轴转动。
陀螺仪转动角速度方向与外力矩作用方向互相垂直的特性,叫做陀螺仪的进动性。
进动角速度的方向取决于转子动量矩H的方向(与转子自转角速度矢量的方向一致)和外力矩M的方向,可用右手定则确定。
进动角速度的大小取决于转子动量矩H的大小和外力矩M的大小,其计算式为 =M/H。
如果这种进动由陀螺仪中的干扰力矩引起,则叫做漂移,漂移角速度即漂移率是衡量各种陀螺仪表精度的最重要的指标。
至于二自由度陀螺仪的特性,就与三自由度陀螺仪不同。
二自由度陀螺仪少了垂直于内环轴和自转轴方向的转动自由度。
这样,当基座绕着这个缺少自由度的轴线转动时,通过内环轴上一对轴承的推动,就强迫陀螺仪跟随基座转动;与此同时,基座作用于内环两端轴承上的推力形成了推力矩将强迫陀螺绕内环轴进动,使自转轴趋于基座转动角速度的方向重合。
(2024年)陀螺课件(61)(共63张PPT)pptx

机械陀螺仪
光学陀螺仪
结构简单、成本低廉,但精度和稳定性较 差,易受环境因素影响。
基于光学原理工作,具有高精度、高稳定 性等优点,但成本较高。
微机械陀螺仪
激光陀螺仪
采用微机械加工技术制造,具有体积小、 重量轻、成本低等优点,但精度和稳定性 相对较低。
利用激光干涉原理测量角速度,具有高精 度、高稳定性、无机械磨损等优点,但成 本较高且对环境要求较高。
多传感器融合与校准
03
在实际应用中,单一陀螺仪往往难以满足需求,多传感器融合
与校准技术成为提高系统性能的关键。
25
探讨未来发展趋势和前景
2024/3/26
新型陀螺仪技术
随着科技进步,新型陀螺仪技术(如量子陀螺仪、生物陀螺仪等)有望在未来取得突破, 为高精度测量和导航领域带来革命性变革。
多源信息融合与智能算法
通过融合多种传感器信息和采用智能算法,可以提高陀螺仪系统的整体性能,实现更高精 度的姿态测量和导航定位。
拓展应用领域
随着陀螺仪性能的不断提升和成本的降低,其应用领域将进一步拓展,如智能交通、智能 家居、虚拟现实等。
26
感谢您的观看
THANKS
2024/3/26
27
组合导航算法
将惯性导航系统与卫星导航系统、里程计等其他导航手段进行组合, 实现优势互补,提高整体导航性能。
14
04
陀螺仪在姿态控制中应用
2024/3/26
15
姿态控制概述及分类
2024/3/26
姿态控制定义
通过对物体姿态的调整,实现其在空间中的稳定定位和定向 。
姿态控制分类
根据控制对象的不同,可分为刚体姿态控制和柔性体姿态控 制;根据控制方法的不同,可分为开环控制和闭环控制。
陀螺仪讲义
图 1-5 摆式陀螺仪受重力作用的情况
由图 1-5 中知道,当陀螺主轴 x 水平时,重力 P 的方向既通过重心 O′,也通过陀 螺仪的支点 O,重力矩为零,对陀螺仪不发生作用,因此陀螺不产生进动。但是当地球 自转了β角之后,陀螺主轴相对地平面 AB,升高了β角,即图中 x 轴方向与 A′B′之 间的夹角(A′B′//AB)。这时陀螺仪的重力 P 的方向不再通过陀螺仪的支点 O,而 产生了力臂为 1sinβ的重力矩(摆力矩)MP,即
1
图 1-4 自由陀螺仪特性实验仪
如果将衡重 A 向左移动一小段距离,在陀螺不转动的情况下,杠杆将在竖直面内产 生逆时针方向的转动,即左端下降、右端上升。但是当陀螺转动时,杠杆不作上下倾斜 运动,而是仍然保持水平,且在水平面内作逆时针方向的转动(从上向下看) ,这种现 象就是所谓的“进动”。如果将衡重 A 向右边移动一小段距离,在陀螺转动的情况下,也 将产生“进动”, 不过进动方向和上述方向相反, 即杠杆在水平面内作顺时针方向的转动 。 1.4 摆式陀螺仪寻北原理 1.4.1 摆式陀螺仪寻北规律 陀螺经纬仪上的陀螺仪,其支点不在三轴的交点上,而是将陀螺仪用弹性悬带悬挂 着,支点在弹性悬带上端的着力点 O 上,如图 1-5 所示,O 点对整个陀螺仪来讲是个不 动点。
1 陀螺及其特性 1.1 陀螺 凡是绕定点高速旋转的物体,或绕自身轴高速旋转的任意刚体,都称为陀螺。如图 1-1 所示,设刚体上有一等效的方向支点 O。以 O 为原点,作固定在刚体上的动坐标系 O-XYZ。刚体绕此支点转动的角速度在动坐标轴上的分量分别为ωx、ωy、ωz,若能 满足以下条件: ωz>>ωx ωz>>ωy ωz≈Const (1-1) 这种类型的刚体统称为陀螺。OZ 轴是高速旋转轴,也称陀螺转子轴。刚体一面绕 OZ 轴作等速旋转,另一方面还可以绕 OX 及 OY 轴作较慢的转动。前者称为自转运动, 后者称为进动运动。
陀螺仪实验——精选推荐
陀螺仪实验陀螺仪是一种具有比较复杂的运动学和动力学现象的装置,它有一个高速旋转的定点运动转子,该转子的轴线具有定向性,这是陀螺的最大特点。
陀螺的定向性在工程中有重要用途,如舰船和导弹的导航、稳定船舶和车辆的姿态,实际上行驶的自行车能够不翻倒也是由于陀螺的定向性,这时自行车的两个轮子就是陀螺。
因此,陀螺仪实验对于学生巩固和提高所学运动学、动力学知识,对复杂运动规律的认知和分析计算都有重要作用。
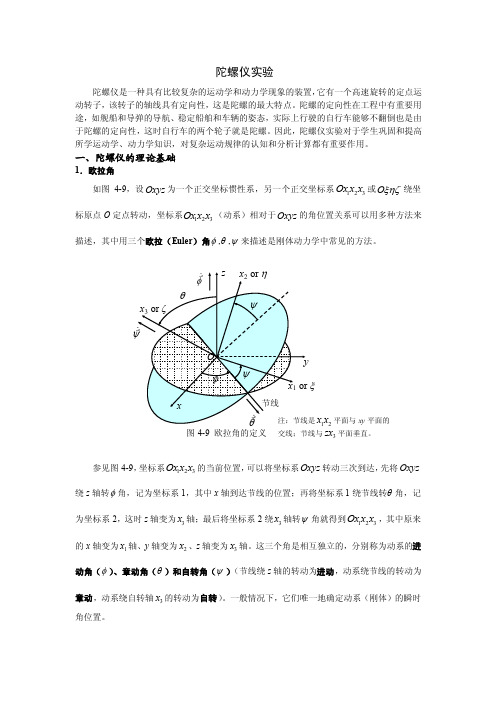
一、陀螺仪的理论基础1.欧拉角如图4-9,设Oxyz 为一个正交坐标惯性系,另一个正交坐标系321x x Ox 或O ξηζ绕坐标原点O 定点转动,坐标系321x x Ox (动系)相对于Oxyz 的角位置关系可以用多种方法来描述,其中用三个欧拉(Euler )角φ,θ,ψ来描述是刚体动力学中常见的方法。
参见图4-9,坐标系321x x Ox 的当前位置,可以将坐标系Oxyz 转动三次到达,先将Oxyz 绕z 轴转φ角,记为坐标系1,其中x 轴到达节线的位置;再将坐标系1绕节线转θ角,记为坐标系2,这时z 轴变为3x 轴;最后将坐标系2绕3x 轴转ψ角就得到321x x Ox ,其中原来的x 轴变为1x 轴、y 轴变为2x 、z 轴变为3x 轴。
这三个角是相互独立的,分别称为动系的进动角(φ)、章动角(θ)和自转角(ψ)(节线绕z 轴的转动为进动,动系绕节线的转动为章动,动系绕自转轴3x 的转动为自转)。
一般情况下,它们唯一地确定动系(刚体)的瞬时角位置。
再来确定动系321x x Ox 的角速度矢量Ω。
在~t t t +∆的t ∆时间内,设动系角位置的无穷小增量为φ∆、θ∆和ψ∆,动系的这种无穷小角位置改变可以将动系分别绕z 轴转φ∆、绕节线转θ∆和绕3x 轴转ψ∆后叠加得到,且结果与转动次序无关(我们对此不作证明,但必须注意,刚体多次有限转动的结果却与转动次序有关,因此不能叠加;学生可以将一本书沿任意两条边以一种次序各转90︒,再重新按不同的次序各转90︒,结果是不同的)。
航海仪器第14讲-安许茨4型罗经(操作)

出现错误 → 设备故障
检查过程是保证设备能否正常工作的先决条件
思考题
随动接通后 为什么第二相的灯会比较暗
谢谢观看
ห้องสมุดไป่ตู้ 启动罗经操作
接通船电开关
接通变压器的电源开关
约20分钟后,陀螺马达的转速达到20000转/分,这时接通随动开
关
• 第一相电流最大,灯较亮
• 第三相次之
• 第二相电流最小,灯最暗
约经过2~4小时,陀螺球就能够稳定指北
陀螺罗经的关机
关闭随动系统 关闭逆变器或变流机电源
关闭船电开关
支撑液体的配方
10升蒸馏水
安许茨4型罗经
课程导入
周期T= 84.4 min 2.5个周期才能稳定指北 开航前4h启动罗经
检查以下4个部件
检查变压器上的电源开关、随动开关必须处于断开位置 要求仪器清洁干燥;机械部分转动灵活;电缆插头、导 线接头和零部件安装要求牢固正常 要求主罗经的液面高度足够 校对所有分罗经的航向应与主罗经航向一致
1升甘油
安息 香酸
10克安息香酸
陀螺球高度要求
液体的基本温度为52°时: 陀螺球的赤道应对准红刻度线 温度在±3°变化范围内: 允许高度±1mm的变化
液面高度的检查过程
取下加液孔的球形橡皮塞,用细木笺插入,用以检查支承液体是否够量 液面至加液孔顶部的距离应≤4~5cm,如液量不够,则应添加
课程小结
陀螺仪实验

目录实验一、陀螺仪实验 (2)实验二、直导体外的磁场 (3)实验三、螺线管内的磁场 (4)实验四、分米波的特性............................................... .5 实验五、天线辐射的方向特性 (6)实验六、电子荷质比 (7)实验七、热空气发动机 (8)实验八、空气中的声速测量 (10)实验九、音叉基频的测量 (11)实验十、测量空气阻力 (12)实验一、陀螺仪实验实验目的:1、通过测量角加速度确定陀螺仪的转动惯量;2、通过测量陀螺仪的回转频率和进动频率确定陀螺仪的转动惯量;3、观察和研究陀螺仪的进动频率与回转频率和外力矩的关系;4、观察和研究陀螺仪的章动频率与回转频率的关系。
实验仪器:1、三轴回转仪;2、计数光电门;3、光电门用直流稳压电源(5伏);4、陀螺仪平衡物;5、数字秒表(1/100秒);6、底座(2个);7、支杆(2个);8、砝码50克+10克(4个);9、卷尺或直尺。
相关术语:转动惯量,力矩,角动量,进动,章动 实验原理:1、如图2用重物(砝码)落下的方法来使陀螺仪盘转动,这时陀螺仪盘的角加速度α为:α=d ωR /dt=M/I P (1)式中ωR 为陀螺仪盘的角速度,I P 为陀螺仪盘的转动惯量。
M=F .r 为使陀螺仪盘转动的力矩。
由作用和反作用定律,作用力为:F=m(g-a) (2)式中g 为重力加速度,a 为轨道加速度(或线加速度) 轨道加速度与角加速度的关系为:a=2h/t F 2; α=a/r (3)式中h 为砝码下降的高度,r 如图1所示为转轴的半径,t F 为下落的时间。
将(2)(3)代入(1)可得:h mgrmr I t P F22222+= (4) 测量多组t F 和h 的值用作图法或最小二乘法拟合数据求出陀螺仪盘的转动惯量。
2、如图3所示安装好陀螺仪,移动平衡物W 使陀螺仪AB 轴(X 轴)在水平位置平衡,用拉线的方法使陀螺仪盘绕X 轴转动(尽可能提高转速),此时陀螺仪具有常数的角动量L :L =I P .ωR (5)当在陀螺仪的另一端挂上砝码m (50g )时就会产生一个附加的力矩M *,这将使原来的角动量发生改变:dL/dt =M *=m *gr * (6)由于附加的力矩M *的方向垂直于原来的角动量的方向,将使角动量L 变化dL ,由图1可见: dL=Ld ϕ这时陀螺仪不会倾倒,在附加的力矩M *的作用下将会发生进动。
第十四次课陀螺经纬仪的检校资料

五系工测教研室
(3)
光学观测系统
分划板的“0”刻划线应与经纬仪望远镜视准轴在同一铅垂 面内,二者的实际水平夹角称为陀螺经纬仪的仪器常数,我们
用 Cg 表示
灯源
在陀螺马达未启动状态下,光标线的静止位置或 自由摆动中心应与分划板零刻划线重合。二者的
实际偏差称为零位,用 表示,以格数计。
NT
N' -6 -4 -2 0 2 4 6
t1 aw1
t2
t3
aE1
aw2
t4
aE2
t5
五系工测教研室
N 摆动中心
(15)
应用测量学
(二)、计算
NT N N
N C a t
t
1 3
t1
t 2
t3
a
1 2
aW
aE
ti ti1 ti ti2 ti1
五系工测教研室
理论公式计算 T12 T22
T22
T1 —跟踪摆动周期 T2 ——不跟踪摆动周期
五系工测教研室
(7)
应用测量学
(二)仪器常数测定与调整
产生原因
仪器结构不严密、外界因素影响等
测定方法
定向前后在已知边上测陀螺方位角
调整
五系工测教研室
(8)
应用测量学 三、陀螺经纬仪定向方法
一、跟踪逆转点法
无扭力观测
6、反向跟踪,记下到达另一逆转点位置时水平度盘的读数 7、托起灵敏部,将视准轴置于两读数之和平均值位置, 即可
五系工测教研室
(10)
应用测量学
(一)、近似指北观测
两逆转点观测法
N r1
r2
左逆转点r1的读数71424
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
陀螺仪表
飞机的姿态仪表和航向仪表,如地平仪、航向 陀螺、惯性导航系统等,大多是利用陀螺特性 工作的。
Page 1
7·1
1·陀螺的定义和分类
陀螺基本知识
能高速旋转并且旋转轴能在空间改变方向的物体,叫做陀螺 。 陀螺的种类很多,目前飞机上应用最多的是刚体转子陀螺和 激光陀螺。
自转轴具有两个自由度的陀螺,叫两自由度陀螺。
Page 12
影响稳定性的因素(转动惯量:转动惯性)
Page 13
3·单自由度陀螺的特性
单自由度陀螺的基本特性是进动性。单自由度陀螺不具有稳 定性。 当单自由度陀螺基座绕其缺少自由度的方向转动时,陀螺将 绕内框轴转动,这种特性称为单自由度陀螺的进动性。 进动方向:角动量矢量沿最短途径转向基座旋转角速度矢量 方向。 单自由度陀螺具有敏感基座绕缺少自由度的轴方向转动的特 性,可用作测量飞机角速度和角位移的仪表。
Page 15
Pa度陀螺等速进动;两自由度陀螺在外 力矩消失后,立即停止进动。 单自由度陀螺加速进动;单自由度陀螺在基 座旋转停止后,等速进动。
Page 5
二自由度陀螺的进动性
Page 6
F作用在外框轴上
Page 7
陀螺绕内框轴进动
Page 8
自转角速度朝左,外力矩矢量朝前,前轮向右转弯。
Page 9
⑵ 稳定性:两自由度陀螺能够抵抗干扰力矩,力图保持其自转轴 相对惯性空间方向稳定的特性,称为陀螺的稳定性。陀螺的稳定 性有两种表现形式:
a·由干扰力矩所引起的陀螺进动,称为漂移。只要陀螺角动量比 较大,陀螺的漂移就很缓慢,在一定时间内自转轴相对惯性空间 方位改变也很微小。 b·陀螺受到冲击力矩作用时,自转轴将在原来的空间方向附近作 高频微幅的圆锥形震荡运动,这种震荡运动称为章动。由于章动 的频率很高,振幅很小,且由于轴承摩擦和空气阻尼等,章动会 很快衰减下来,可以认为陀螺受冲击力矩作用时也是稳定的。这 是陀螺稳定性的又一表现。在航空仪表中,利用两自由度陀螺的 稳定性可以确定飞机的姿态和航向。
Page 14
单自由度陀螺的进动性
自转角速度矢量向右,使 基座反时针转动,那么外 力矩方向向上,根据陀螺 进动规律,自转角速度矢 量,将沿最短途径转向外 力矩矢量的方向,也就是 陀螺绕内框轴转动,即自 转角速度矢量向上进动, 进动角速度矢量沿内框轴 向外。转弯仪正是利用单 自由度陀螺的进动特点工 作的。
Page 10
基座倾斜自转轴仍保持水平
Page 11
⑶·陀螺稳定性和进动性的关系及影响因素
陀螺的稳定性越高,在干扰力矩作用下,陀螺的进动角 速度就越小;反之,进动角速度越大。
陀螺稳定性和进动性的大小与下列四个因素有关:
第一,转子自转角速度越大,稳定性越好,进动性越差
; 第二,转子对自转轴的转动惯量越大,稳定性越好,进 动性越差; 第三,外力矩越大,稳定性越差,进动性越好。外力矩 一定时,进动角速度也一定;外力矩消失后,陀螺立即停止 进动; 第四,自转轴与外框轴垂直时,稳定性好,否则,稳定 性将变差。
自转轴具有一个自由度的陀螺,叫单自由度陀螺。 有的书上根据转子具有的自由度分类,则把上面所说的两自 由度陀螺和单自由度陀螺分别称为三自由度陀螺和两自由度 陀螺。
Page 2
Page 3
单
Page 4
2·两自由度陀螺的特性
两自由度陀螺具有两个基本特性:进动性和稳定性。 ⑴ 进动性:两自由度陀螺受外力矩作用时,它的转动方向与外 力矩方向相互垂直的特性,称为两自由度陀螺的进动性。 进动方向:角动量矢量沿最短途径转向外力矩矢量的方向。 右手螺旋法则:将右手大母指伸直,其余四指以最短路线从角 动矢量方向握向外力矩矢量的方向,则大拇指的方向就是进动 角速度矢量的方向。