1电力拖动系统动力学PPT课件
合集下载
第1章电力拖动系统动力学22页PPT

Fm
工件
工作台
由于 =2n/60
Tmeq =9.55FmVm/n
考虑传动损耗 Tmeq =9.55FmVm/nC
第1章
(2)飞轮矩的折算
设做平移运动部分的物体重量为Gm,质量为m,
刨
折算前动能:
vm
刀
Fm
工件
折算后动能:
工作台
折算前后的动能不变。 ∴ ∴
传动机构中其他轴上的 GD2的折算,与前述相 同。
第1章
3.工作机构做提升和下放重物运动时,转矩与飞轮矩 的折算 (1)转矩的折算 1)提升重物时负载转矩的折算 重物对卷筒轴的负载转矩为GmR 不计传动机构的损耗,折算后的负载转矩为:
若考虑传动机构的损耗,折算后的负载转矩应为:
提升重物时系统损耗的转矩为:
第1章
2)下放重物时负载转矩的折算 重物对卷筒轴的负载转矩为GmR 不计传动机构损耗,折算后的负载转矩为:
1 l'
A
0
TL
T
图 1-21 拖 动 系 统 的 不 稳 定 运 行
第1章
谢谢!
第一章 电力拖动系统动力学
本章教学基本要求
电力拖动系统的运动方程式 工作机构转矩、力、飞轮矩和质量的折算 考虑传动机构损耗时的折算方法 生产机械的负载转矩特性
1.3电力拖动系统的动力学基础
1.3.1电力拖动系统的运动方程
电力拖动系统:单轴(重点介绍)、多轴(可折算成单轴)。
1、单轴电力拖动系统。 单轴拖动系统是指电动机输出轴直接拖动生产机械
1、当 T T L
dn 0 dt
电动机静止或等速旋转,电力拖动 系统处于稳定运转状态下。
2、当 T T L
工件
工作台
由于 =2n/60
Tmeq =9.55FmVm/n
考虑传动损耗 Tmeq =9.55FmVm/nC
第1章
(2)飞轮矩的折算
设做平移运动部分的物体重量为Gm,质量为m,
刨
折算前动能:
vm
刀
Fm
工件
折算后动能:
工作台
折算前后的动能不变。 ∴ ∴
传动机构中其他轴上的 GD2的折算,与前述相 同。
第1章
3.工作机构做提升和下放重物运动时,转矩与飞轮矩 的折算 (1)转矩的折算 1)提升重物时负载转矩的折算 重物对卷筒轴的负载转矩为GmR 不计传动机构的损耗,折算后的负载转矩为:
若考虑传动机构的损耗,折算后的负载转矩应为:
提升重物时系统损耗的转矩为:
第1章
2)下放重物时负载转矩的折算 重物对卷筒轴的负载转矩为GmR 不计传动机构损耗,折算后的负载转矩为:
1 l'
A
0
TL
T
图 1-21 拖 动 系 统 的 不 稳 定 运 行
第1章
谢谢!
第一章 电力拖动系统动力学
本章教学基本要求
电力拖动系统的运动方程式 工作机构转矩、力、飞轮矩和质量的折算 考虑传动机构损耗时的折算方法 生产机械的负载转矩特性
1.3电力拖动系统的动力学基础
1.3.1电力拖动系统的运动方程
电力拖动系统:单轴(重点介绍)、多轴(可折算成单轴)。
1、单轴电力拖动系统。 单轴拖动系统是指电动机输出轴直接拖动生产机械
1、当 T T L
dn 0 dt
电动机静止或等速旋转,电力拖动 系统处于稳定运转状态下。
2、当 T T L
第二章 电力拖动系统动力学PPT课件

m与G——旋转部分的质量(kg)和重量(N)
注意:运动方程式适用于单轴系统,因为速度量只有一个
将上式中的角速度Ω(Ω=2πn/60)化成为转速n,则有:
7
T
Tz
GD2 375
dn dt
(8-4)
GD2——飞轮惯量(N.m2),GD2=4gJ。电动机转子及其他转动 部件的飞轮惯量GD2 数值由产品目录中查出。
电动机拖动的生产机械的旋转部分会出现多种形状(圆柱体 和非圆柱体),需对常见形体的转动惯量作计算。
所有的旋转部分可分为两种情况:旋转轴线通过物体重心和 旋转轴线不通过重心。
(1) 旋转轴线通过该物体重心时,转动惯量公式为:
k
J ri2mi i 1
质量连续分布 J r2dm V
Δmi——该物体某个组成部分的质量 ri——该部分Δmi的重心到旋转轴的距离。对质量连续分布
20
传动图
'
等效折算图
21
四、工作机构直线运动质量的折算
系统中的重物作直线运动,需要把速度为vz(m/s)质量为mz (kg)的物体折算到电动机轴上, 用电动机轴上转动惯量JZ的 转动体来等效。
折算原则:转动惯量JZ中和质量mz中储存的动能相等,即:
JZ
2 2
GD2 = 4gJ = 4×9.8×16.933 N.m2 = 663.774 N.m2
14
第二节 工作机构转矩、力、飞轮惯量和质量的折算
◆实际拖动系统:轴往往有多根,不同的轴上有不同的转动 惯量和转速,以及不同的转矩和阻力距。
◆研究方法:列出每根轴的运动方程式,各轴间互相联系的 方程式,联系所有方程式。复杂
j = j1j2j3…
一般设备,电动机为高转速,工作机构轴为低速,则j>>1
电力拖动系统动力学(1)
拖动系统组成
能量 转换
机械 传动
电源
提供 能源
电机
传动 机构
拖动 对象
控制 装置
控制电机的运 动方式
编辑ppt
3
绪论 电机与拖动的基本概念
电力拖动系统在建筑设备中的应用 空调系统中冷机组,冷却水泵,冷冻水泵, 空调机,风机盘
管中的风机 电梯中的曳引电机 给排水系统、消防系统中的水泵、消防系统中的卷帘 各类电风扇
平移运动 速度
电机转速
传动效率
平移运动—飞轮矩的折算
折算原则:折算前后的动能不变
折算到电机轴上的飞轮矩为:
GDL2g
365Ggvg2 nd2
编辑ppt
16
负载转矩和飞轮矩的折算
升降运动—负载转矩的折算 升降运动是建筑设备常见的运动
起重机拖动系统
对于升降运动,在进行转 矩折算时,其上升和下降 运动过程的转矩不同,传 动系统的效率也不同
编辑ppt
7
第1章 电力拖动系统动力学
电力拖动系统的运动方程式 运动方程式是运动过程的物理模型,是运动过程 的力学表征 电力拖动系统的运动方程式描述旋转运动的力学 关系,即牛顿力学定律在旋转运动过程的应用 旋转运动中一般采用“转矩”和“角速度”描述 力矩和速度
编辑ppt
8
电力拖动系统的运动方程式
绪论 电机与拖动的基本概念
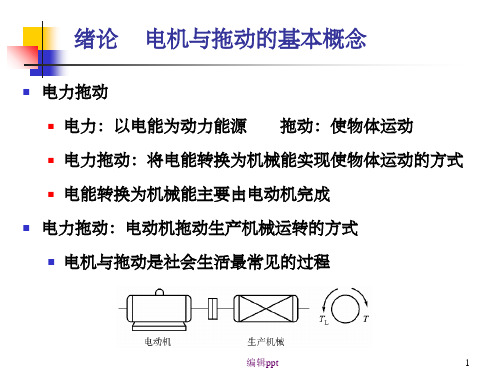
电力拖动 电力:以电能为动力能源 拖动:使物体运动 电力拖动:将电能转换为机械能实现使物体运动的方式 电能转换为机械能主要由电动机完成
电力拖动:电动机拖动生产机械运转的方式 电机与拖动是社会生活最常见的过程
编辑ppt
1
绪论 电机与拖动的基本概念
电机:将电能转换为机械能的设备,以电磁感应为基本原理 电机分类:不同的分类原则有不同的分类
电力拖动ppt课件

电力拖动ppt课件
目 录
• 电力拖动概述 • 电力拖动系统的电动机 • 电力拖动系统的控制电路 • 电力拖动系统的应用实例 • 电力拖动系统的维护与故障排除
01
电力拖动概述
定义与原理
定义
电力拖动是指利用电动机作为原 动机来拖动生产机械的工作机构 使之运转的一种方法。
原理
利用电动机产生的转矩和转速, 通过传动机构来驱动生产机械的 工作机构运转。
电力拖动系统能够精确控制生产线的速度、位置和运动轨迹,提高生产效率和产品 质量。
工业自动化生产线通常需要高可靠性和高稳定性的电力拖动系统,以确保生产线的 正常运行和生产安全。
电梯控制系统
电梯是电力拖动系统在垂直运 输领域的典型应用,通过电机 驱动曳引绳或链条实现升降运 动。
电力拖动系统能够精确控制电 梯的速度和位置,提供安全、 舒适、高效的运输服务。
按控制方式分类
手动控制、半自动控制和自动控制等 。
机械传动、液压传动和气压传动等。
02
电力拖动系统的电动机
电动机的种类与特点
直流电动机
具有良好的调速性能, 适用于需要平滑调速的 场合。但结构复杂,维
护成本高。
交流电动机
结构简单,维护方便, 但调速性能较差。常见 的有异步电动机和同步
电动机。
伺服电动机
应确保所选电动机符合安全标准,并具有 必要的安全保护功能。
03
电力拖动系统的控制电 路
控制电路的组成与原理
组成
控制电路主要由控制电器、保护电器和测量仪表组成,用于实现对电动机的启 动、调速、制动和反向等控制操作。
原理
通过控制电路中的电器元件,实现对电动机的电源通断、调速和转向的控制, 从而达到生产工艺的要求。
目 录
• 电力拖动概述 • 电力拖动系统的电动机 • 电力拖动系统的控制电路 • 电力拖动系统的应用实例 • 电力拖动系统的维护与故障排除
01
电力拖动概述
定义与原理
定义
电力拖动是指利用电动机作为原 动机来拖动生产机械的工作机构 使之运转的一种方法。
原理
利用电动机产生的转矩和转速, 通过传动机构来驱动生产机械的 工作机构运转。
电力拖动系统能够精确控制生产线的速度、位置和运动轨迹,提高生产效率和产品 质量。
工业自动化生产线通常需要高可靠性和高稳定性的电力拖动系统,以确保生产线的 正常运行和生产安全。
电梯控制系统
电梯是电力拖动系统在垂直运 输领域的典型应用,通过电机 驱动曳引绳或链条实现升降运 动。
电力拖动系统能够精确控制电 梯的速度和位置,提供安全、 舒适、高效的运输服务。
按控制方式分类
手动控制、半自动控制和自动控制等 。
机械传动、液压传动和气压传动等。
02
电力拖动系统的电动机
电动机的种类与特点
直流电动机
具有良好的调速性能, 适用于需要平滑调速的 场合。但结构复杂,维
护成本高。
交流电动机
结构简单,维护方便, 但调速性能较差。常见 的有异步电动机和同步
电动机。
伺服电动机
应确保所选电动机符合安全标准,并具有 必要的安全保护功能。
03
电力拖动系统的控制电 路
控制电路的组成与原理
组成
控制电路主要由控制电器、保护电器和测量仪表组成,用于实现对电动机的启 动、调速、制动和反向等控制操作。
原理
通过控制电路中的电器元件,实现对电动机的电源通断、调速和转向的控制, 从而达到生产工艺的要求。
电力拖动基础ppt课件

四、例:他励直流电动机调压调速的物理过程
U a Ea I a Ra Ea ken
kTIa
负载转矩 Tl 恒定
原状态:
Ua1, n1, Ea1, Ia ,T
新状态:
Ua2 , n2 , Ea2 , Ia ,T
1.2 电力拖动系统的机械特性
1.2.1 机械特性
1. 机械特性是指转速与转矩之间的关系曲线,即 n f (T )
nn10
U aN
n2
U1
n3
U2
n4
U3 T
0
Tl
3.电枢回路串电阻起动
1C
2C Ia
R j1
Rj2
Ra
Ua
Ea
3C
n
n
nn01
A
n2
n3
1 Ra
n1 n2
2
Ra R j1
n3
3
Ra R j1 R j2
Tl
T
0
Il I2 a)
I1
Ia
0
Il I2
I1 Ia
0
t1
t2 t3
t
b)
t1
t2
t3
t
60
J m 2 G ( D )2 GD 2 ( kgm2 )
g 2 4g
式中:G——重量(N);g——重力加速度,g = 9.81m/s2 ;
D——惯性直径(m); ——惯性半径(m)
J
d
dt
的实用形式为
T
T
GD 2 375
dn dt
GD 2 4gJ 称为飞轮矩 (N m2 ) 375具有加速度量纲
恒转矩调速
nN
n
恒功率调速
第1章电力拖动系统的动力学基础PPT课件

2
+Jm
nm n
2
1.4 多轴旋转系统的折算
或:
J = JR+
J1 j12
+
J2 j12 j22
+
Jm j12 j22 jm2
= JR+
J1 j12
+
J2 j12 j22
+
Jm j2
如果在电动机和工作机构之间总共还有 n 根中间轴,
则:
j = j1 j2 ···jn jm
J = JR+J1
n1 n
Ω 和 n 不能突变,否则 J
d
d t →∞
即系统不可能具有无穷大的功率。
TL
T2
TL
T2
TL
T2
TL
T2
电动状态1
制动状态1
电动状态2 制动状态2
第1 章 电力拖动系统的动力学基础
1.4 多轴旋转系统的折算
电动机 等
n z1 z4 n2 z5
TL n1 z2 z3
nm 工作机构 z6 Tm
效
电动机 n 等效负载
( ) T2 -TL = J
d
dt
d = dt
1 J 2
2
电动机输 出的功率
负的载功吸率收P2-PL = J
d
dt
系统动能
(1) T2 >0 ,即 T2 与Ω 方向相同。
电动机输出机械功率 —— 电动状态。
(2) T2 <0 ,即 T2 与Ω 方向相反。
电动机输入机械功率 —— 制动状态。
TL
T2
TL
(4) 电力拖动系统容易控制、操作简单、 便于实现自动化。
3. 应用举例 精密机床、重型铣床、 初轧机、 高速冷轧机、高速造纸机、风机、水泵……
电力拖动系统的动力学基础培训课件(1)
部件作旋转运动。采用古典动力学来分析。
一.运动方程式
1.直线运动时的运动方程式
F --拖动力(N);
Fz --阻力(N);
m(dv/dt)--惯性力。
作直线运动的物体
2.旋转运动时的方程式为:
T --电动机产生的拖动转矩(N·m); Tz --阻转矩(或称负载转矩)(N·m); J(dΩ/dt)--惯性转矩(或称加速转矩)。
折算原则:
实际系统与等效系统储存动能相等。
有下列关系:
考虑到 GD2 = 4gJ,Ω = 2πn/60,得
2.3 考虑传动机构损耗的简化方法
传动机构损耗的简化考虑方法可在折算公式中引
一入1..工电传作动动效机机率工构η作转c 在矩电T动z’状的态简化折算
电动机带动工作机构,功率由电动机向工作机构 传送
当 T < TZ,dn/dt < 0
二.运动方程式中转矩的正负号分析
应用运动方程式,通常以电动机轴为 研究对象 运动方程式写成下列一般形式
旋转运动中的转矩如下图
对 T 与 Tz 前带有的正负符号, 作如下规定:预先规定某 一旋转方向为正方向,则
转矩T方向如果与所规定的 旋转正方向相同,T 前取正 号,相反时取负号;
变
通风机型负载
n
负载的转矩与T 转速的平0 方成
正比
五.实际负载特性
实际生产机械的负载转矩特性是以上几种典型 特性的综合。
1.实际通风机负载
2.机床刀架的平移
第二章完,谢谢!
旋转运动的物体
3.转动惯量 J 表示为:
J
m 2
G g
D2 2
GD 2 4g
m 与 G -- 旋转部分的质量(kg)与重量(N);
一.运动方程式
1.直线运动时的运动方程式
F --拖动力(N);
Fz --阻力(N);
m(dv/dt)--惯性力。
作直线运动的物体
2.旋转运动时的方程式为:
T --电动机产生的拖动转矩(N·m); Tz --阻转矩(或称负载转矩)(N·m); J(dΩ/dt)--惯性转矩(或称加速转矩)。
折算原则:
实际系统与等效系统储存动能相等。
有下列关系:
考虑到 GD2 = 4gJ,Ω = 2πn/60,得
2.3 考虑传动机构损耗的简化方法
传动机构损耗的简化考虑方法可在折算公式中引
一入1..工电传作动动效机机率工构η作转c 在矩电T动z’状的态简化折算
电动机带动工作机构,功率由电动机向工作机构 传送
当 T < TZ,dn/dt < 0
二.运动方程式中转矩的正负号分析
应用运动方程式,通常以电动机轴为 研究对象 运动方程式写成下列一般形式
旋转运动中的转矩如下图
对 T 与 Tz 前带有的正负符号, 作如下规定:预先规定某 一旋转方向为正方向,则
转矩T方向如果与所规定的 旋转正方向相同,T 前取正 号,相反时取负号;
变
通风机型负载
n
负载的转矩与T 转速的平0 方成
正比
五.实际负载特性
实际生产机械的负载转矩特性是以上几种典型 特性的综合。
1.实际通风机负载
2.机床刀架的平移
第二章完,谢谢!
旋转运动的物体
3.转动惯量 J 表示为:
J
m 2
G g
D2 2
GD 2 4g
m 与 G -- 旋转部分的质量(kg)与重量(N);
课程开始及电力拖动系统的动力学基础PPT演示文稿

四、工作机构直线运动质量的折算
折算的原则是转动惯量 J z 中及质量 m z 中储存的动能相等,即
Jz
2
2
mz
vz2 2
有
(GDz2)
365Gzvz2 n2
(因为Jz Gz2 D/4g,2πn/6,0mz Gz /g,(60/π)2 365)
14
[例8-1] 刨床传动系统如图所示。若电动机M 的转速为n=420r/min, 其转子(或电枢)的飞轮惯量 Gd 2D 11.50 Nm2 工作台重 G1 1205N0
解 1)旋转部分
GDa2 G1 2D G (z2 2 2D / zG 1)23 2D (z2G /z1 4 2 )2 D (z G 4/5 z 23 D )2 (z2/z1)G 2(z6 42 D /zG 3)2(72 D z6/z5)2
(z2/z1)2(z4/z3G )2(z8 26 D /z5)2(z8/z7)2(4.122(05.15/0290).281(525/28.40)02(6148./6300)2
2
第二篇 交流拖动控制系统
第1章 异步电动机及其拖动
*第2章 第3章
闭环控制的异步电动机变压调速 系统——一种转差功率消耗型调速 系统
笼型异步电动机变压变频调速系统 (VVVF系统)
3
第二篇 交流拖动控制系统
*第4章 绕线转子异步电机双馈调速系统 ——转差功率馈送型调速系统
*第5章 同步电动机变压变频调速系统
1、当 T Tz 2、当 T Tz
dn 0 dt
dn 0 dt
电动机静止或等速旋转,电力拖动 系统处于稳定运转状态下。
电力拖动系统处于加速状态
3、当 T Tz
dn 0 dt
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2.实际工程应用中的运动方程式:
在工程应用中,常用: n代替表示系统速度, 用飞轮力矩GD2代替J表示系统机械惯性。
运动方程
三、由运动方程式分析系统运动状态
1.2 多轴系统负载转矩与飞轮矩的折算
?对多轴系统如何分析系统的运行状态。
1、建立若干个运动方程式,联立求解。 2、把多轴系统等效为单轴系统。
7149
i12
GD42 GDg2 7149
nd2 i12 i22
GD GD 2
2
GD22 GD32
GD42 GDg2
L1Biblioteka i12i12 i22
• 平移运动与升降运动的负载转矩与飞轮矩 的折算请大家自学。
1.3 负载转矩特性
负载的转矩特性指:n=f(TL)
一、恒转矩负载特性 1.反抗性恒转矩负载 2.位能性恒转矩负载
2.飞轮矩的折算:
思路与步骤: 总飞轮矩=工作机构部分的飞轮矩
+传动机构部分的飞轮矩 +电动机转子的飞轮矩
折算原则:动能不变。
j ( ) 旋转物体的动能表达式: 1 2
2 1 GD2 2n 2 GD2n2
2 4 g 60
7149
GDL2nd2 7149
GD12nd2 7149
GD22 GD32 nd2
第1章 电力拖动系统动力学
主要内容: 电力拖动系统运动方程式; 负载的转矩与飞轮矩的折算; 负载特性。
电力拖动是用电动机带动生产机械运动,以 完成一定的生产任务。
电力拖动系统的组成:
1.1 电力拖动系统的运动方程式
• 典型的电力拖动系统: 单轴系统:
多轴系统:
以单轴系统为例,建立运动系统的运动方式。 一、电力拖动系统常用物理量
• 负载:旋转、平移、升降。 • 折算原则:功率不变、
能量不变。
一. 旋转运动负载转矩及飞轮矩的折算 1.转矩折算:
思路与步骤*:
1.不考虑传动机构损耗,进行转矩折算。 2.考虑传动机构损耗,进行转矩折算。
折算原则:功率不变
1.不考虑传动机构损耗时 TL Tg g 2.考虑传动机构损耗时 TL Tg g
二、通风机与泵类的负载特性 三、恒功率负载特性
一、恒转矩负载机械特性 1、反抗性恒转矩负载特性
其特点: 负载转矩大小恒定(与n无关); 负载转矩方向与运动方向相反。
2、位能性恒转矩负载特性 (负载转矩由重力产生) 其特点: 绝对值大小恒定; 作用方向与n无关,不变。 提升时: n >0 ,TL >0阻转矩 下放时: n<0 ,TL>0拖动转矩
When You Do Your Best, Failure Is Great, So Don'T Give Up, Stick To The End
感谢聆听
不足之处请大家批评指导
Please Criticize And Guide The Shortcomings
演讲人:XXXXXX 时 间:XX年XX月XX日
二、通风机与泵类的负载特性 负载转矩与转速成平方关系TL=kn2。
三、恒功率负载特性
负载转矩与转速成反比关系TL=k / n
例如机床主轴和轧机、造纸机、塑料薄膜生产线中的卷取机、开卷机等 要求的转矩,大体与转速成反比
结束语
当你尽了自己的最大努力时,失败也是伟大的, 所以不要放弃,坚持就是正确的。
电动机转速、电动机电磁转矩、电动机空 载转矩、工作机构(负载)的转矩。
TL T0 Tm
二、建立运动方程
1.研究运动方程,以电动机的轴为研究对象,电 动机运行时的轴受力如图示,由动力学 定律(牛顿第二定律)可知,其必须遵守下 列方程式:
d T TL J dt
T:电磁转矩; TL:负载转矩,N.m J:电动机轴上的总转动惯量,N.m.s2 :电动机角速度, rad/s