无线传感器网络中基于RSSI的改进定位算法
基于RSSI测距定位算法的研究和改进

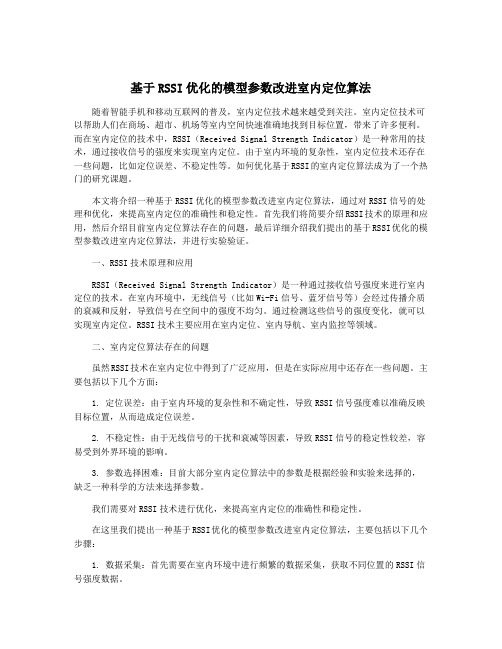
图1 应用不同环境参数的定位误差示意图
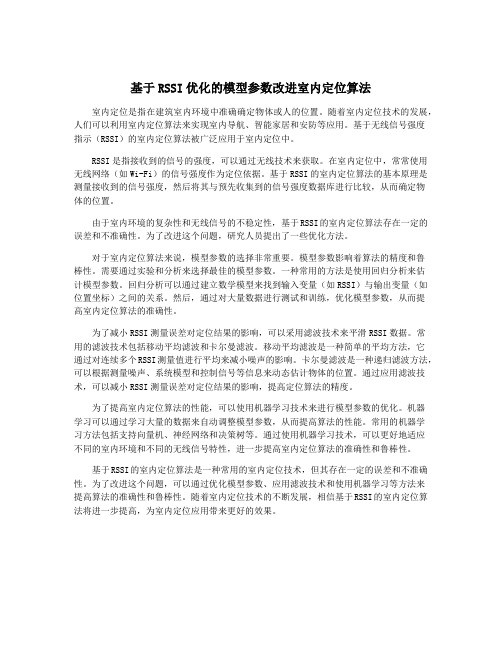
图2 子区域分割示意图
收稿日期:2017-08-18 作者简介:何沃林(1974 —),男,广东东莞人,硕士,高级工程师,研究方向:电子技术应用开发。
134
数字技术 与应用
算法分析
割的示意图。 在具体运用时,需结合室内整体布局,对子区域的分割方案予
以合理设计,尽量减少由障碍物导致的影响。在通信距离方面只需 保持在临界距离以内,不需要对子区域进行完全相等的划分。在分 割区域以后,在拟合环境参数时,以各子区域作为操作环境,最终获 得的环境参数和子区域相符。
测量时,要将参考节点设定为圆心,在半径为1米的圆周之上,有多
个参考节点平均分布,随后对圆周之上全部参考节点的RSSI值进行
测量,并进行平均值求取,具体参见如下公式(1)。
A
1
N
(RSSI )
N i1
(1)
n为传播损耗系数,环境因素的影响很大,属于一种需重点修正
的参数。由于参考节点位置坐标已知,通过和附近的参考节点测距
由此可认识到,定位精确度很大程度上会因为微小的环境参数 变化而受到影响。从室内环境来看,障碍物会把室内空间分隔成多 个相对独立的子区域,使用单一的环境参数无法适用于整体区域。
1.3 信号干扰 (1)突发干扰。测量RSSI值时,不论是环境的突然改变、还是人 员走动等,均会对此产生突发干扰。因为突发干扰的存在,对RSSI值 产生了显著影响,且比障碍物存在于信道时的影响程度明显更高。 (2)随机干扰。信号在传播过程中受到信号反射、衍射以及测量 节点内部噪声和量化噪声等因素的影响,使得节点测量获得的RSSI 数值产生随机误差[2]。在RSSI测量进程中,随机干扰持续存在,使测 量值不断波动,而且因为无规则变化,使得其数值的正负、大小等无 法被预测[2]。 (3)噪声干扰。RSSI值测量的整体进程均会受到噪声影响,使得 最终获得的是噪声和测量值混合后的数据[3]。对比随机干扰导致的 RSSI数值波动,噪声干扰之下的数值波动显然更强,而导致较大脉 冲的出现,数据变化更无规律可循[3]。
无线传感器网络中基于RSSI差值的改进定位算法

在低 功率 高密度 无 线 设 备 组 成 的 网络 中, 由于 同
步 的原 因 , 使得 T OA 往 往 比较 难 实 现 . 多 径 和 噪 D 而
差为d r 的零 均值 正态 分 布随 机变 量 , L R ) P ( 。 为对应 R 。 处 节点 的接 收信 号强 度值 .
应信 标节 点 库 , 而 对 不 同位 置 范 围 的 待测 节 点 优 化 选 取 其 定 位 采 用 的 信 标 节 点 , 继 最后 将 由未 知 节 点 接 收 到 的信 号 强 度 得 到 的多 用 户 间 的距 离 进 行 差值 , 化 求 解 非 线 性方 程组 , 高 算 法 性 能 . 真 结 果 表 明 , 文 中 的 R S WS 差 值 定 位 优 提 仿 本 SI N 算 法 比传 统 的 RS I 位 算 法 拥 有 更 好 的定 位 性 能 . S定
径, 很难 精 确 的进 行 TOA 或 T DOA 估 计 . 在 R 而 A—
D 【 ,p t 5等 许 多 项 目 中使 用 到 的 R S 技 AR 4 S oON[ ] ] SI 术 , 需设 备简单 , 一种低 功 率 、 成本 的测距 技术. 所 是 低
1 2 多用 户 R S 差 值 定 位 算 法 . SI
20 年 5 08 月
无 线传 感器 网络 中基 于 R S 差 值 的 改进 定 位 算 法 SI
徐 燕 , 江 宏 , 晓 芳 石 吴
( 门 大 学 信 息 科 学 与技 术 学 院 , 建 厦 门 3 1 0 ) 厦 福 60 5
、
摘要: 无线传感器网络( N 的许多应用都需要知道节点的位置, WS ) 在某些环境下还需要获得节点的相对位置. 本文以
基于RSSI优化的模型参数改进室内定位算法
基于RSSI优化的模型参数改进室内定位算法随着智能手机和移动互联网的普及,室内定位技术越来越受到关注。
室内定位技术可以帮助人们在商场、超市、机场等室内空间快速准确地找到目标位置,带来了许多便利。
而在室内定位的技术中,RSSI(Received Signal Strength Indicator)是一种常用的技术,通过接收信号的强度来实现室内定位。
由于室内环境的复杂性,室内定位技术还存在一些问题,比如定位误差、不稳定性等。
如何优化基于RSSI的室内定位算法成为了一个热门的研究课题。
本文将介绍一种基于RSSI优化的模型参数改进室内定位算法,通过对RSSI信号的处理和优化,来提高室内定位的准确性和稳定性。
首先我们将简要介绍RSSI技术的原理和应用,然后介绍目前室内定位算法存在的问题,最后详细介绍我们提出的基于RSSI优化的模型参数改进室内定位算法,并进行实验验证。
一、RSSI技术原理和应用RSSI(Received Signal Strength Indicator)是一种通过接收信号强度来进行室内定位的技术。
在室内环境中,无线信号(比如Wi-Fi信号、蓝牙信号等)会经过传播介质的衰减和反射,导致信号在空间中的强度不均匀。
通过检测这些信号的强度变化,就可以实现室内定位。
RSSI技术主要应用在室内定位、室内导航、室内监控等领域。
二、室内定位算法存在的问题虽然RSSI技术在室内定位中得到了广泛应用,但是在实际应用中还存在一些问题。
主要包括以下几个方面:1. 定位误差:由于室内环境的复杂性和不确定性,导致RSSI信号强度难以准确反映目标位置,从而造成定位误差。
2. 不稳定性:由于无线信号的干扰和衰减等因素,导致RSSI信号的稳定性较差,容易受到外界环境的影响。
3. 参数选择困难:目前大部分室内定位算法中的参数是根据经验和实验来选择的,缺乏一种科学的方法来选择参数。
我们需要对RSSI技术进行优化,来提高室内定位的准确性和稳定性。
基于RSSI优化的模型参数改进室内定位算法
基于RSSI优化的模型参数改进室内定位算法室内定位是指在建筑室内环境中准确确定物体或人的位置。
随着室内定位技术的发展,人们可以利用室内定位算法来实现室内导航、智能家居和安防等应用。
基于无线信号强度指示(RSSI)的室内定位算法被广泛应用于室内定位中。
RSSI是指接收到的信号的强度,可以通过无线技术来获取。
在室内定位中,常常使用无线网络(如Wi-Fi)的信号强度作为定位依据。
基于RSSI的室内定位算法的基本原理是测量接收到的信号强度,然后将其与预先收集到的信号强度数据库进行比较,从而确定物体的位置。
由于室内环境的复杂性和无线信号的不稳定性,基于RSSI的室内定位算法存在一定的误差和不准确性。
为了改进这个问题,研究人员提出了一些优化方法。
对于室内定位算法来说,模型参数的选择非常重要。
模型参数影响着算法的精度和鲁棒性。
需要通过实验和分析来选择最佳的模型参数。
一种常用的方法是使用回归分析来估计模型参数。
回归分析可以通过建立数学模型来找到输入变量(如RSSI)与输出变量(如位置坐标)之间的关系。
然后,通过对大量数据进行测试和训练,优化模型参数,从而提高室内定位算法的准确性。
为了减小RSSI测量误差对定位结果的影响,可以采用滤波技术来平滑RSSI数据。
常用的滤波技术包括移动平均滤波和卡尔曼滤波。
移动平均滤波是一种简单的平均方法,它通过对连续多个RSSI测量值进行平均来减小噪声的影响。
卡尔曼滤波是一种递归滤波方法,可以根据测量噪声、系统模型和控制信号等信息来动态估计物体的位置。
通过应用滤波技术,可以减小RSSI测量误差对定位结果的影响,提高定位算法的精度。
为了提高室内定位算法的性能,可以使用机器学习技术来进行模型参数的优化。
机器学习可以通过学习大量的数据来自动调整模型参数,从而提高算法的性能。
常用的机器学习方法包括支持向量机、神经网络和决策树等。
通过使用机器学习技术,可以更好地适应不同的室内环境和不同的无线信号特性,进一步提高室内定位算法的准确性和鲁棒性。
基于RSSI的无线传感器网络定位算法的改进

基于RSSI的无线传感器网络定位算法的改进张雪;王韦刚;田龙彬;常智;徐爱华【摘要】无线传感器网中,节点自身定位至关重要.目前,节点定位算法主要分为两种类型,即基于距离的定位算法和指纹库的定位算法.其中,基于接收信号强度指示(RSSI)的三角形质心定位算法由于实现简单而被广泛使用,但传统的三角形质心定位误差较大,从而影响了节点定位精度.针对这个问题,提出一种基于RSSI的改进定位算法—CLIP算法,并用于无线传感器网络定位.仿真结果表明,改进后的定位算法能大大提高无线传感器网络的定位精度.%Node self-localization is very important in wireless sensor networks.At present,there exist two types of node localization algorithms,including the algorithms based on distance and based on fingerprint database.The triangle centroid localization algorithm based on RSSI(received signal strength indicator) is widely used for its simplicity.However,the error of triangle centroid localization algorithm is relatively large,and this would directly affect the precision of node location.To solve this problem,an algorithm named CLIP is proposed and used in WSN location.Simulation results indicate that the modified localization algorithm can greatly improve the localization accuracy of wireless sensor networks.【期刊名称】《通信技术》【年(卷),期】2017(050)005【总页数】5页(P968-972)【关键词】无线传感器网络;三角形质心定位;节点定位;接收信号强度指示【作者】张雪;王韦刚;田龙彬;常智;徐爱华【作者单位】南京邮电大学电子科学与工程学院,江苏南京210023;南京邮电大学电子科学与工程学院,江苏南京210023;南京邮电大学电子科学与工程学院,江苏南京210023;南京邮电大学电子科学与工程学院,江苏南京210023;南京邮电大学电子科学与工程学院,江苏南京210023【正文语种】中文【中图分类】TP212.9;TN929.5随着现代传感器技术、无线通信技术、嵌入式技术等的高速发展,无线传感器网络的功能越来越多,应用领域也越来越广。
基于RSSI优化的模型参数改进室内定位算法
基于RSSI优化的模型参数改进室内定位算法室内定位是指在室内环境中使用技术手段对移动终端的位置进行定位。
目前,基于RSSI(接收信号强度指示)的室内定位算法被广泛应用于WiFi、蓝牙和Zigbee等无线通信技术中。
由于室内环境的复杂性,定位误差较大,因此需要对模型参数进行优化改进。
我们需要了解室内定位算法的基本原理。
基于RSSI的室内定位算法通常使用多个参考节点的信号强度值来进行定位。
参考节点被布置在室内环境中,并且已知其位置坐标。
通过测量移动终端接收到的参考节点的信号强度,可以计算移动终端与每个参考节点之间的距离。
然后,通过距离的三角定位法来确定移动终端的位置坐标。
由于信号在室内环境中的传播受到多径效应、障碍物的干扰等因素影响,计算得到的距离存在误差。
为了改进模型参数,可以考虑以下几个方面。
第一,优化距离计算模型。
距离的计算模型一般使用路径损耗模型或指数模型。
路径损耗模型将信号强度与距离之间的关系表示为一个线性函数,但在室内环境中,信号强度与距离之间的关系并非完全线性。
可以尝试使用非线性函数来建立信号强度与距离之间的关系模型,以更准确地计算距离。
第二,引入地理信息辅助定位。
除了信号强度,地理信息也是确定位置的重要因素。
可以将参考节点的地理位置信息作为约束条件,与信号强度结合使用。
可以使用最小二乘法来拟合地理位置信息和信号强度,以获得更精确的定位结果。
考虑场景特性进行参数优化。
不同的室内环境具有不同的特征,例如墙壁材料的不同、障碍物的位置等。
可以通过对不同场景中的RSSI数据进行采集和分析,建立不同场景下的模型参数,以提高室内定位的准确性。
第四,引入机器学习算法进行参数优化。
机器学习算法可以通过学习大量的RSSI数据和真实位置数据,自动调整模型参数,以最小化定位误差。
可以使用分类算法(如支持向量机)或回归算法(如神经网络)来进行建模和参数优化。
基于RSSI优化的模型参数改进室内定位算法可以通过优化距离计算模型、引入地理信息辅助定位、考虑场景特性进行参数优化以及引入机器学习算法等方法来提高室内定位的准确性。
无线传感器网络中基于RSSI的节点定位算法研究
无线传感器网络中基于RSSI的节点定位算法研究无线传感器网络中基于RSSI的节点定位算法研究摘要:随着无线传感器网络的发展,节点定位技术成为无线传感器网络研究领域中的重要问题之一。
本文基于RSSI (Received Signal Strength Indicator)的节点定位算法进行了研究。
一、引言无线传感器网络是由大量的分布式无线传感器节点组成的网络系统,广泛应用于环境监测、目标跟踪、智能交通等领域。
节点的定位是无线传感器网络中的关键问题之一,准确的节点定位可以提高网络性能和应用效果。
二、节点定位技术概述节点定位技术主要分为两类:基于GPS的定位和基于无线信号的定位。
基于GPS的定位技术需要节点具备GPS模块,但GPS模块存在成本高、功耗大等问题。
基于无线信号的定位技术可以通过节点之间的相对距离和信号强度来实现定位。
三、RSSI技术原理RSSI是指接收信号强度指示器,是无线传感器网络中常用的参数。
RSSI的测量可以通过接收到的信号强度来判断节点之间的距离和位置关系。
四、基于RSSI的节点定位算法基于RSSI的节点定位算法主要有三种:距离法、三角法和指纹法。
1. 距离法:根据RSSI和距离之间的关系,通过RSSI测量值来计算节点之间的距离。
然后通过多个节点之间的距离来计算目标节点的位置。
2. 三角法:利用三角定位原理,通过多个节点之间的RSSI值来计算目标节点的位置。
通常需要至少3个节点才能定位。
3. 指纹法:通过在节点部署区域进行事先测量和标记,得到不同位置的RSSI指纹图,并与目标节点接收到的RSSI进行匹配,从而确定目标节点的位置。
五、实验结果分析通过对比不同算法的节点定位精度,可以得出以下结论:距离法具有较高的精度,但依赖于传输的RSSI值准确性;三角法需要多个节点参与定位,效果相对较好;指纹法在实际应用中可以得到较高的定位精度。
六、节点定位误差分析节点定位误差的主要影响因素包括传感器的误差、信号传播过程中的噪声干扰等。
基于RSSI的无线传感器网络修正加权质心定位算法
好 一 些 , 常 包 括 : 心 算 法 、 V—o 通 质 D H p算 法 、 mo A r -
p o sA I 法等 , 中的质心算 法和 D . o h u 、 PT算 其 V H p算法
使用 更为广 泛 。而基 于测 距 算法 包括 : SI 、O 、 R S T A T O A A、 D A、 O 灯塔 测 量 法 等 , 类 算 法 的定 位 精度 相 此 对 较低 , 中 由于 R S 算法借 助 的硬件设 备较 少 , 其 SI 而 且很 多无线通 信模块都 可 以直 接提供 R S值 。因此 , S
Ke r s w rl s e sr ew rs( N) R S ; egtdcnri cl a o l rh m df dce c n ywo d : i e no tok WS ; S I w i e et dl a zt nag i m; o ie of i t e ss n h o o i i ot i i e
L U Y ni, I n l , U h n y / uj JN Migu C IC eg i e
(colfEet nca dI omainE gne n D l n U i rt ehooy DainLa nn 10 4 hn ) Sh o o l r i n fr t n i r g, ai nv syo Tcn l , l ioig16 2 ,C ia co n o ei a ei f g a
A s a t B sdo eevd Sg a Srnt n ia r( S I ,am df d w ihe et i l a zt n a o b t c : ae n R ci i l t g Idct R S ) o ie e t cnr d o lai l - r e n e h o i g d o ci o g
基于改进的RSSI无线传感器网络节点定位算法研究
关 键词 :无线 传感 器 网络 ; 节点 定位 ; 收信 号强度 ; 心定 位 算法 接 质
中图分类 号 :T 3 3 P 9 文献 标志 码 :A 文章 编号 :1 0 - 6 5 2 1 ) 5 1 6 '3 0 13 9 ( 0 2 0 —8 7 0
d i1 . 9 9 ji n 1 0 —6 5 2 1 .5 0 1 o :0 3 6 / .s .0 13 9 .0 2 0 .7 s
ห้องสมุดไป่ตู้
rt m e g t.L sl t s d c n r i o aiai n a g rtm ac u t h o e l c t n a d o tie o e e a t o ain i h w ih s a t y,i u e e t d lc l t lo i o z o h t c Ia ae t e n d o ai n b an d n d x c c t . o o l o T e smu ain r s h h w t a .t e ̄ g r h i r v st e n d o ain a c r c n e u e h o a in er r c mp r d h i lt e u s s o h t h t o i m mp o e h o e l c t c u a y a d r d c s t e lc t r o a e o l t o o o
苟 胜 难
( 山师范 学院 计 算机科 学 学院 , 川 乐山 640 ) 乐 四 104
摘 要 :研 究无线 传感 器 网络 节 点定位 问题 。接收 信号 强度 值 ( S I 直接 影 响无 线传 感 器 网络 节点 定位 准 确 R S)
度 , 有 定位 算法没 有考 虑锚 节点 的 R S 消 息 , 成节 点定位 精度 低 。为 了提 高无 线传 感 器 网络 节 点 的定位 而现 SI 造 精 度 , 出 了一 种基 于 R S 的 质心 定位算 法 。首先通 过无 线信 号强度 计 算 出节 点 间 R S 值 , 提 SI SI 然后 把 R S 值 转 SI
基于RSSI优化的模型参数改进室内定位算法
基于RSSI优化的模型参数改进室内定位算法随着物联网和移动通信技术的发展,室内定位技术逐渐成为了研究热点之一。
室内定位是指在室内环境下利用无线信号、传感器数据等技术手段确定移动终端设备的准确位置信息。
它在商业应用、安防监控、智能家居等领域中具有重要的实用价值。
室内定位技术的研究已经取得了一定的进展,但是在实际应用中还存在一些问题。
其中一个主要问题是定位精度不高,容易受到环境干扰、信号衰减等因素影响,导致定位结果出现偏差。
为了克服这些问题,研究人员提出了基于RSSI(Received Signal Strength Indication)优化的模型参数改进室内定位算法,通过对接收信号强度进行优化,提高定位精度和稳定性。
RSSI是衡量无线信号接收端的功率大小的指标,它可以反映信号在传输过程中的衰减情况。
在室内定位中,接收设备通过接收信号强度来确定自身与发射设备之间的距离,然后利用三角定位等数学方法来计算设备的准确位置。
由于环境复杂、多径效应等因素的影响,RSSI存在一定的误差。
如何有效利用RSSI数据来提高定位精度是当前研究的重点之一。
1. RSSI数据滤波和校正:为了减小RSSI数据的误差,可以采用滑动平均、加权平均等滤波方法进行数据平滑处理,去除数据中的噪声。
还可以通过对比不同位置下的RSSI数据,进行校正和修正,提高RSSI数据的准确性。
2. RSSI信号建模:建立RSSI信号与距离之间的数学模型是室内定位算法改进的关键步骤。
根据实际信道特性和传输模型,可以选择合适的信号传播模型,如自由空间传播模型、多径传播模型等,建立RSSI信号与距离之间的映射关系。
通过模型拟合和优化,可以得到更为准确的距离估计值,提高定位精度。
3. 模型参数自适应调整:在建立RSSI信号与距离关系模型的过程中,需要确定一些参数,如信号传播指数、路径损耗系数等。
而这些参数的选择对算法的精度和泛化能力具有重要影响。
通过实时获取RSSI数据,可以采用自适应的方法来调整模型参数,使其能够更好地适应不同环境下的定位需求。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
无线传感器网络中基于 RSSI 的改进定位算法
赵 昭 ,陈小惠 3
南京邮电大学自动化学院 ,南京 210003
摘 要 : 无线传感器网络节点自身定位至关重要 ,在军事和民用领域中有着广泛的应用前景 . 目前的定位算法主要分为两种
类型 ,即基于距离的定位算法和距离无关的定位算法 . 这两种类型的算法各有优势和不足 . 考虑了两种算法的优缺点 ,提出了 一种廉价实用的定位算法 ,该方法通过校正 RSSI 测距技术测量的节点间点到点的距离 ,并优选信标节点 ,最后用加权质心方 法进行定位 . 仿真结果表明 : 本算法比传统的 RSSI 定位算法拥有更好的定位性能 。
1 算法模型
1. 1 无线信号传播模型 现今主要存在 3 种信号传播模型 : Free2Space 模型 , Two2Ray Gro und Reflectio n 模型和 Shado2 wing 模型 。前两个模型都认为接收信号的能量是
392
传 感 技 术 学 报
2
2009 年
2
( x - x A ) 2 + ( y - y A ) 2 = dA ( x - xB )
2
在 RSSI 值测距过程中 ,距离越近测距精度越高 , 所以本文采取优选信标节点的方法提高未知节点的 精度 . 如图 4 所示 ,具体做法是 : 未知节点将测得的 d 值从小到大排序 , 取前四个信标节点进行定位 , 每次 取 3 个信标节点即 3 个圆便可对未知节点进行一次坐 标估计 , 共有 4 组组合可产生待测节点 M ( x , y) 的 4 次 估 计 坐 标 M1 ( x1 , y1 ) , M2 ( x2 , y2 ) , M3 ( x3 , y3 ) , M4 ( x4 , y4 ) 再对其求质心 , 可得节点 M 的坐标为 :
收稿日期 :2008211212 修改日期 :2009201208
是无线传感器网络定位较常采用的方法 。 实验验证 RSSI 的定位测距可重复性 , 在适度 的动态环境中 RSSI 变化有规律性 , 采用加权和均 值法可消除环境因素对 RSSI 测量的影响[ 8 ] 。本文 根据这些特点 ,提出了一种低成本 , 能耗小 , 定位精 确且实用的方法 。该方法把固定信标节点之间的距 离和信号强度两种信息同时作为参考来校正 RSSI 测距值 ,并优选信标节点 ,然后采用加权质心法计算 待测节点位置 ,于是有效地减少了测距误差并提高 了运算效率 。
图 1 三边测量法图示 图 2 三边测量实际情形
方后再两两相减 , 即可得图 2 中直线 L 1 , L 2 , L 3 : 2 2 L 1 :2 ( x B - x A ) x + 2 ( y B - y A ) y = d A - dB 2 2 2 2 ( 6) xA + xB - yA + yB
+
1
dA + dB + d E
2 2 2 2
三条直线的交点即式 ( 6) , 式 ( 7) , 式 ( 8) 组成的 方程组的解 , 可以作为未知节点 M 的估计坐标 。 若 方程组无解 , 则说明三条直线无交点 。 如图 3 所示 。
( 1)
图3 三条直线无交点情形
Shadowing 模型的第二部分反映了当距离一定
时 , 接收到能量的变化 。 它是一个对数正态随机变 量 , 也就是说 , 如果以 dB 作为计量单位它满足高斯 分布 。 完整的 Shadowing 模型如下 :
Pr ( d) Pr ( d0 )
dB
1. 3 优选信标节点模型
β = - 10 lg
d + Xσ d0
( 2)
Xσ 是一个平均值为 0 的高斯分布变量 , Pr ( d0 )
和 d0 分别是参考能量和参考距离 。Shadowing 模 型对理想环境模型进行了扩展 , 将一个零均值高斯 分布的随机噪声引入了无线电传播模型 , 其特征可 以用对数正态分布的随机变量来刻画 。 1. 2 数学模型 三边测量法如图 1 所示 ,已知 A 、 B、 C 三个节点 ( xB , yB ) 、 ( x C , y C ) , 以及它 的坐标分别为 ( x A , y A ) 、 们到未知节点 M 的距离分别为 d A 、 dB 、 dC , 假设节点 M 的坐标为 ( x , y) 。 那么 , 存在下列公式为
关键词 : 无线传感器网络 ;节点定位 ; RSSI 测距 ;加权质心算法 中图分类号 :TN915. 01 文献标识码 :A 文章编号 :100421699( 2009) 0320391204 无线传感器网络 [ 122 ] 节点自身定位是其他应用 的基础 ,因为只有在传感器节点自身正确定位后 ,才 能确定监测到的事件发生的具体位置 , 实现对外部 目标的定位和追踪 。如今 , 无线传感器网络定位已 经成为了一个很重要的研究方向和热点问题 [ 3 ] 。 距离无关的定位算法主要有质心法 ,DV2 HOP , 凸规划和 MDS2MAP 等 ,这类算法通过节点之间的通 信连接关系来粗略估算节点的位置 ,对节点硬件要求 较低 ,但定位精度不高。基于距离的定位算法由于实 际测量节点间的距离或角度 ,通常定位精度较高。常 用的测距方式有 GPS[ 4 ] ,红外线[ 5 ] , 超声波[ 6 ] 和 RS2 SI[ 7 ] 等 , GPS ,红外线和超声波测距都需要额外的硬 件 ,增加了节点的硬件成本和尺寸 ,基于 RSSI 的定位 无须额外硬件 ,利用对接收无线电信号的强弱判断 , 推导收发节点间的距离 ,计算接收无线信号强度是商 用无线收发芯片具备的功能 ,所以基于 RSSI 的测距
Z H A O Z hao , C H E N X i ao2h ui
3
Colle ge of A utomation N anj i n g Uni versit y of Posts an d Telecom m unications , N anj i ng 210003 , Chi na
Abstract :In wireless sensor networks , t he node self2localizatio n is vital and p ro mising to a wide scope of bot h military and civilian applicatio ns . In t his respect t here are t wo t ypes of algorit hms ,i. e. range2based and range2irrelevant ,eit her has it s own advantages and disadvantages. Taking acco unt of t ho se of t he t wo algorit hms ,a low2co st and p ractical algorit hm is p ropo sed , using collatio n of RSSI ( received signal st rengt h indicator ) fo r range measurement bet ween nodes and optimizatio n of beaco n node in sensor network ,t hen localizing no des by weight cent roid algorit hm. Simulatio n result s show t hat t his algorit hm has a bet ter per2 formance t han classical RSSI algorit hm. Key words :wireless sensor net wo rks ; localizatio n ; distance measurement based o n RSSI ; weight cent roid algorit hm EEACC :7230 ;6210C;6150P
第 22 卷 第3期 2009 年 3 月
传 感 技 术 学 报
CHIN ES E J OU RNAL O F S ENSORS AND ACTUA TORS
Vol . 22 No. 3 Ma r . 2009
An Improved Localization Algorithm Based on RSSI in WSN
P r ( d0 ) = Pr ( d) d d0
β
L 2 :2 ( x C - x B ) x + 2 ( y C - y B ) y = dB - d C xB + x C - yB + y C
2 2 2 2 2 2
( 7) ( 8)
L 3 :2 ( x C - x A ) x + 2 ( y C - y A ) y = d A - d C xA + xC - yA + yC
在上述过程中 , 每组参与定位的 3 个圆若出现 三条直线无交点即对应的方程组无解 , 则用后面的 节点替换前一个节点 , 直到满足定位要求为止 。 为了进 一 步 提 高 定 位 精 度 , 采 用 加 权 的 思 [ 10 ] 想 , 即在每组定位坐标中引入加权因子 。 加权因 子为参与每次定位 3 个圆的半径和的倒数 , 若参与 定 位 的 信 标 节 点 为 A ( xA , yA ) 、 B ( xB , yB ) 、 C( x C , yC) 、 E ( x E , y E ) , 待测节点 M ( x , y ) 到各信标节点的 距离分别为 d A 、 dB 、 dC 、 d E , 通过 A , B , C 点得到 M 点 的坐标估计 M 1 ( x 1 , y1 ) , 通过 A , B , E 点得到 M 点的 坐标估计 M2 ( x2 , y2 ) , 通过 A , C, E 点得到 M 点的坐