直线型超声波电机
基于PSoC的直线型超声波电动机精密定位系统
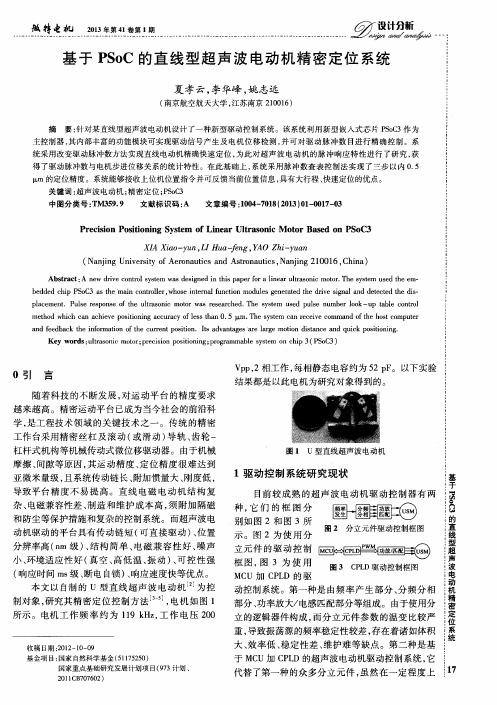
直线超声电动机在精密工作台中的应用

2 超 声 波 压 电 陶瓷 电机 平 台
最早 将直 线 超 声 电机 用 于 精 密 工 作 平 台 的 国 家是 日本 。19 年 , 日本 K zm s 制 了一 种 利 91 au aa研 用 型 直 线 超 声 电机 驱 动 的 精 密 X Y工 作 台 J - 。 该 工作 台尺寸 为 2 8X2 8×5 i ,最 大 速 度 为 0 0 6ml l 3 m s 0m / ,最 大 输 出 力 为 60 g。在 驱 动 频 率 为 0 f
Ab ta t:S sr c umma z d s me i o tn h r ce so a to a r c s tg i r e o mp ra tc a a tr ft di n lp e ie sa e, i to u e h r s n i r i n r d c d t e p e e tst —
9 H 时 ,位 置精 度可 达 0 0 m。 0k z .1
流伺服 电机 ; ( )系统 的物理 结构 较庞 杂 ,存 在较 多 的中间 3 转 换环节 ; ( )控 制系统 一般都 较 复杂 ,例 如采 用 F Z - 4 U Z Y控制 器实 现宏 ( ) 位 ,采 用 P 控 制 实 现微 定 粗 定 I 位 ,算 法 程 序 较 复 杂 ,控 制 系 统 成 本 高 ,所 以系
利用宏 ( ) 粗 、微 ( ) 级 定 位 系 统 驱 动 的 大 细 两 行 程精密 工作 台 的特 点主 要是 : ( )微动定 位 系统一般 都是 采用 压 电作 动器 或 1 者 压 电作 动器 与柔性 铰链 技术相 结合 的驱 动系统 ;
( )宏 ( ) 位 系统 驱 动 一 般 采 用 交 流 或 直 2 粗 定
Appl a i n fLi a t a o c M o o o e ie St e i to o ne r Ulr s ni c t r f r Pr cs ag XU n Ha g
纵弯模式驻波超声波直线电机的研制与实验
摘
要 :以薄板面 内振动 的纵 弯模式 直线型 超声波 电机 为 目标 ,对 其驱动 机理 、建模 、设 计和制 作等方 面展 开研
究 ,设计了全新结构 的样机 ,并对其进行 了实验研究与分析 。结果表明 ,电机运行 良好 ,设计达到了预期 目标 。
关键词 :直线 型超 声波 电机 ;面 内振动 ;矩形薄板 ;纵弯模式 中图分类号 :T 5 . ;T 3 9 9 M39 4 M 5 . 文献标 志码 :A 文章编号 :10 —88 2 1 )00 3 —3 1 16 4 (0 1 —0 80 3 1
子 间所需 的预压 力 。 这类 电机定 子 一 般 采 用 金 属板 和压 电 陶瓷 粘 贴
Ab ta t h s t e i a me t h e l a in o e L sr c :T i h ss i d a e r a i t f h UM a e n L n i d n lf x r d ,a d su id t z o t b s d O o gt i a — e u a mo e n t d e u l l Ol t mo e e in,smu ai n, n f cu e a d e p r n ai n h l w n r e c if e e r h w r i i d ld sg s i lt o ma u a t r n x e i me tt .T e f l i g a et h e s ac o k o oo h r a d a h e e n so i h ss h tri a n w tp f UM a e n t e vb ain i l n ft et i n c i v me t f h s t e i .T e moo s e e o t y L b s d o h i r t p a e o n o n h h
低压驱动Ⅴ形直线超声电机的设计

第29卷第1期2021年1月Vol.29No.1Jan.2021光学精密工程Optics and Precision Engineering低压驱动V形直线超声电机的设计黄卫清,杨成龙,沈兆琛,薛昊东,安大伟*(广州大学机械与电气工程学院,广东广州510006)摘要:针对传统V形直线超声电机驱动电压较大、驱动电路复杂,在配合变压器驱动时不利于结构微型化的问题,提出了一种利用叠层压电陶瓷驱动的低压V形直线超声电机。
在对V形直线超声电机的运行机理进行理论分析的基础上,设计了基于叠层压电陶瓷的V形振子并进行了夹持装置的结构设计,进一步制作样机并开展了阻抗实验,测试了样机的外输出特性。
实验结果表明:电机的驱动频率位于36~38kHz,在37kHz,50Vpp的驱动电压激励下,其最大输出力为25.8N,最高空载速度为1.221m/s,可在低压驱动下输出大推力,直线超声电机的驱动性能得到了提高。
关键词:超声电机;直线电机;V形结构;低压驱动;振子设计中图分类号:TM359.4文献标识码:A doi:10.37188/OPE.20212901.0091Design of V-shaped linear ultrasonic motor driven with low-voltage HUANG Wei-qing,YANG Cheng-long,SHEN Zhao-chen,XUE Hao-dong,AN Da-wei*(School of Mechanical and Electrical Engineering,Guangzhou University,Guangzhou510006,China)*Corresponding author,E-mail:andavy@Abstract:To solve the problem of the high driving voltage of traditional V-shaped linear ultrasonic mo⁃tors,which results in a complex driving circuit and the disadvantage of structure miniaturization when matching with transformer driving,a low voltage driving V-shaped linear ultrasonic motor based on lami⁃nated piezoelectric ceramics was proposed.Based on the analysis of the working principle of the V-shaped linear ultrasonic motor,a V-shaped oscillator with laminated piezoelectric ceramics and a clamping device were designed.Finally,a prototype of the motor was fabricated,and the impedance and performance were measured.The experimental results show that the operating frequency of the motor is between36and38 kHz while under a driving voltage of50Vpp and37kHz,the maximum output force of the motor reaches 25.8N,and the maximum no-load velocity reaches1.221m/s.Key words:ultrasonic motor;linear motor;V-shaped structure;low voltage drive;vibrator design1引言压电直线电机具有定位和速度控制精度高、结构设计灵活,易实现装置的小型化和轻量化等特点,广泛应用于精密驱动等相关领域[1-3]。
双向驻波型直线超声波电动机

SS Y 计算分析 的基础上进行优化设计 , 并研制 了相应样机验证 了上述思想 。 关键词 : 超声波 电动机 ; 波型 ; 限元 ; 驻 有 直线 电动机 中图分 类号 :M3 T 8 文献标识码 : A 文章编号 :0 4— 0 8 2 0 0 0 3 0 10 7 1 (07)8— 0 0— 3
J n— u i go a
( . igoIs tt o eh o g ,hj n n esy Nn b 0, hn ; 1 N nb ntue f c nl y Z e a gU i ri , ig o3 C ia i T o i v t 11 50 2 Z e a gU i r t o eh o g , a gh u3 ,C ia . hj n nv s y f c n l H n zo 0 hn ) i e i T o y 1 1 0 4
机 J复合振 子型 直线 超 声 波 电动 机 和 多模 振 子 、 型超声 波 电动机 。
1基本 原 理
双 向驻波 直 线 超声 波 电动 机 的 定 子 ( 子 ) 振 为
一
矩 形压 电复 合薄 板 , 薄 板 上 分 布着 齿 以扩 大振 在
幅 。当分 别给 电机振 子 以 B 4或 B 3振动 模 式激 振 , 定子 上 的三个 齿将 分别 形成左 斜 向上和 右斜 向上 的
Ab t a t B s d o h n lss o c a i , tn i g w v i—d rc in i e r v n l a o i mo o a sr c : a e n t e a ay i f me h n s a sa d n a e b m ie t a l a l mo ig u t s n c ol n y r tr w s su id frt e p r o e o lme t ga p a t a i e ru t s nc mo o t i l t cu e a d smp ed ii gb t i t d e o h u p s fi e n i rc i l n a l a o i t r h smp e s u tr n i l r n y u i — mp n c l r wi r v l zn S S s f a e I h n t e p oo y e wa r s n e o c e k t e o t m d sg . i g AN Y o t r . n t e e d,h r tt p s p e e td t h c h p i w mu e in
复合振子型直线超声电动机的发展与研究现状

0引 言
超 声波 电动 机是近 几 十年来 迅速发 展起 来 的一 种新 型 电机 , 是利 用 压 电材 料 的逆压 电效 应 激 发 它
( h n ogU i rt o S i c S a dn nv sy f c n e& T c nlg , a n2 0 , hn e i e eh o y T i 7 0 C i o a 1 0 a)
Ab t a t Th v me tme h n s n h rc eit fl e ru t s n c moo e e s mma z d, n h e eo — sr c : e mo e n c a im a d c a a t r i o i a l a o i sc n r tr w r u i r e a d te d v lp me to o y ia ie rUS w r e p c iey a ay e u h a r v l n v y e,t n ig wa e tp , y i r n — n fs me tp c ll a M e e r s e t l n lz d s c s t el g wa e tp sa d n v y e h b d t s n v a i a d c r y e in c fo y e a d S n T e rs ac o tn s a d s me q e t n fUS w r on e u n t e w y o u e —tp ,bo i o ttp n O o . h e e r h c ne t n o u si s o M e e p i td o ti h a . f o t e r d l g mo e n o to , p l ain i h n ie rn t . n h e eo i g d rc in wa e n t d . h oy mo ei , v me t n r l a p i t n t e e gn ei g ec a d te d v l pn i t sd f i e n c c o e o i u
双翼形直线超声波电动机
上海市 博士后科 研资 助计划 ( 1 1 R 2 1 4 1 3 4 0 0 ) 上海大 学创新 基金资 助项 目( S D C X 2 0 1 2 0 2 5 )
致使空心 圆柱上下 、 左 右摆动的两个振动模 态工作 , 驱动动 子旋转直线运 动。推导 质点 的运 动轨 二 耋_ 薹卟 了电机定子驱动 m 一 一 迹方程 , 研究 了电机定 子驱动动子运 动的工作 机理。利用有限元 法进行分 析计算 , 对定 子驱动质点 的运动轨 迹进 行 了仿真 , 验证 了电机运 动机理分析的正确性。制作 了双翼形直线超声波电动机原理样机 , 并 进行性能 测试, 试验 表 明电机 的工作频域范 围较 宽, 在激励 电压峰峰值为 2 5 0 V时, 电机 的空载速度为 1 5 5f f l f l / S , 最大输出力为 0 1 0 6 N, 是定子质量 的 1 1 7倍 。
墼昝 皇 蜘
2 0 1 4 号 箩 4 2 差 莹 鞠
—
双 翼 形 直 线 超 声 波 电动 机
张健 滔 . 李朝 东
( 上海大学, 上海 2 0 0 0 7 2 ) 摘 要: 提 出一款双翼形 直线超声波电动机。电机定子为一 个带双翼 的空心 圆柱 结构 , 其利用 双翼弯 曲振动
羞
关键词 : 直 线超声波电动机; 工作 机理; 有限元分析; 振动模 态; 机械特性
中图分 类号: T M3 5 9 . 4 文献标识码 : A 文章编号 : 1 0 0 4 — 7 0 1 8 ( 2 0 1 4 ) 0 1 — 0 0 0 5 — 0 4
基 ~ 堇 一 一 基 ~ 蠢 一
【国家自然科学基金】_直线型超声电机_基金支持热词逐年推荐_【万方软件创新助手】_20140731
科研热词 超声电机 面内模态 运动机理 超声波 纵向振动 直线运动 直线超声电机 直线型 激励方式 椭圆轨迹 有限元法 振子 振动模态 定位平台 大推力 压电陶瓷 优化
推荐指数 4 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
推荐指数 1 1 1 1 1 1 1 1 1 1 1 1
2011年 序号 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18
2011年 科研热词 超声电机 直线超声电机 变幅杆 阶梯圆柱 输出力 设计 精密定位平台 直线 椭圆运动 柔性铰链 效率 控制系统 弯曲振动 定子 夹持装置 双层板簧 压电振子 pid控制 推荐指数 3 2 2 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
2012年 序号 1 2 3 4 5 6 7 8 9 10
科研热词 直线超声电机 超声电机 虚拟仪器 稳定性 直线 机械特性 夹持装置 响应面法 优化设计 la 1 1 1 1
2014年 序号 1 2 3 4 5 6 7 8 9 10 11 12
科研热词 闭环控制系统 超声电机 直线超声电机 sopc技术 niosⅱ软核处理器 精密定位 灵敏度分析 模态分析 引信安全系统 复合控制 压电 兵器科学与技术
推荐指数 2 2 2 2 2 1 1 1 1 1 1 1
2009年 序号 1 2 3 4 5 6 7 8
科研热词 驻波 超声电机 瞬态特性 直线型超声波电机 测试 有限元法 不对称激励 labview
推荐指数 1 1 1 1 1 1 1 1
2010年 序号 1 2 3 4 5 6 7 8 9 10 11 12
一种新型直线超声波电动机的设计
葺
车
文章编号 :04—7 1 (0 7 O 0 2 10 0 8 2 0 )1— 01一o 2
De i n o w T p n a t a o i o o sg f a Ne y e Li e r Ul s n c M t r r
1需
.
.
I
I …… L
辫
() b
— l
图 1 直线驻波型超声波 电动机所用 的两种振型
设计 的振 子结构 简 图如 图 2所 示 。振 子采 用层
叠式压 电陶瓷 , 充分利用了压 电陶瓷 的 d 效应 , 相 比一般的超声波电动机振子所采用的 d 效应 , , 压电 效应提高了三倍以上。当两个层叠式压电陶瓷分别 通以同频且相位相差 9 。 0 的正弦交流 电, 可有效激 发 出振 子 的 一 阶纵 振 和 二 阶弯 振 J 。振 子 的有 限
Ab t a t A n w tp i e ruta o i moo t l l y r pe o l crc a t ao s w s p e e td T e moo a e n s r c : e y eln a l s n c r trwi mut a e iz e e t cu tr a r s n e . h tr b s d o h i i
t e vb a in i ln ft er ca g lrp ae T e dme so so e sao r e in d b h S a k g . h n an w h i rt n p a e o e tn u a l t . h i n i n ft ttra e d sg e y t e AN YS p c a e T e , e o h h sr cu e ma i g t e moo gi salt n e sl sd v lp d T ee p r na e u t s o d t a i k n fmoo t i e t tr k n tr n t l i a i wa e eo e . h x e i u h ao y me tl s l h we h t h s i do tr t n d r s t aa
一种双足驱动直线超声波电动机的设计
( s gu n es y B in 0 0 4 C i ) Ti h aU i r t, e ig10 8 , hn n v i j a
摘 要: 设计 了一 种单 边双足驱动的面 内振动直线 超声
增 长 的对直 线 电机小 型 化 、 型化 的需求 , 在成 为 微 正
一
波电动机 , 其定子采用 了一 片铜 板和八片压 电陶瓷构成 的复 合结 构 , 电点 陶瓷沿 着厚度 方 向极化 , 压 对称 安装 在矩形 铜
个 研 究热 点 。在 国外 , 以色 列 N nm tn公 司 和 ao oi o
板 的两个 表面上。建立 了该 电机 的机 电耦合动 力学 模型 , 通
过仿 真确 定了驱动足的位置 , 并试验研究了 电机 的特性 。 关键词 : 直线超声波 电动机 ; 合板 ; 层 面内振 动 ; 电陶 压
a e p lrz d ao g t e t ik e s a d a e s mmerc l o d d r oa ie ln h h c n s n l y tial b n e y
t e t o s ra e f n e t g e b a sp ae o t w u f c so e r ca l r lt .D u l h o n s o b e—d v n i r ig fe r a s mb e n t e  ̄l i e o h r s lt . T e e t a e s e ld o h s l sd f te b a pa e h e s w r ig v b ai n mo e i a c mp st n—p a eb mo e o k n i r t d s o o i i o e l i d ,wh c n ih c n it f te f s o g td n n— p a e v b ai n mo e a d o ssso r tl n i ia i h i u l ln ir t d n o te s c n e d n n .T e b i sz fte l e r U M sd — h e o d b n i g o e h a c ie o i a S i e s h n tr n d c r f l y F A. T e c a a trs c ft e p ooy e e mi e a eu l b E y h h ce t s o r tt r i i h p moo e e me u e x e me tl . trw r a r d e p r n a l s i y Ke wo d :ie l a o i moo ; a n td p ae ; i r — y r s l a ut nc nr r s tr l mi ae lts vb a
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
vx max
2 2 A cos2 t B cos2 (t )
(8-14)
调速方法:改变激励电源的角频率、电压幅值(对应于驻波振幅) 和两相电源的相位差均可改变转子的运动速度。 1. 电压控制
改变电压幅值可以改变行波的振幅,从而改变转子速度,但实际中
很少采用。因为电压过低,压电元件有可能不起振;电压过高又会 提高元件的耐压要求,增加成本。
图8-2 质点运动的轨迹
拨动,从而使转子连续不断的旋转。
8.2.2椭圆运动及其作用
椭圆运动的形成:在空间有两个相互垂直的振动位移 ux 和 uy ,均 由简谐运动形成,振动的角频率为 ,时间相位差为 ,振幅分 别为 x 和 y ,即有
u x x sin(t )
u y y sin(t )
(8-10)
8.3.2 电机的工作原理
弹性体表面任一质点P的运动方程
2 2 1 2 2 0 (kh00 )
(8-11)
该式表明,弹性体表面任意一点 P 按照椭圆轨迹运动,这种运动
使弹性体表面质点对移动体产生一种驱动力,且移动体的运动方
向与行波方向相反。 如果把弹性体制成环形结构,当弹性体受到压电陶瓷振动激励产 生逆时针转向的弯曲行波时,它表面的质点呈现顺时针方向的椭
8.5 其他类型的超声波电机
8.5.1 驻波超声波电机 8.5.2 直线型超声波电机 8.5.3 多自由度超声波电机 8.5.4 非接触型超声波电机
8.5.1 驻波超声波电机
对于驻波超声波电机,在定子中激励的是单纯驻波振动,质点做往 复直线运动,通过转换装置或与其他运动组合,把往复直线运动转 换为椭圆运动,最后驱动转子旋转。
8.3.4 电机的运行特性
超声波电机的运行特性主要是指转速、效率、输出功率等与输出转
矩之间的关系。这些特性与电机的类型、控制方式等有关。
机械特性:超声波电机的机械特性 与直流电动机类似,但电机的转速 随着转矩的增大下降更快,并且呈 现明显的非线性。 效率特性:超声波电机的最大效率 出现在低速、大转矩区域,因此适 合低速运行。目前环形行波型超声 波电机的效率一般不超过45%。
8.3.2 电机的工作原理
1. 定子行波的产生
由于压电陶瓷相邻分区
的极化方向相反,在共 振频率的交流电压激励
下,相邻极化区将会分
别伸张和收缩,从而在 定子弹性体中激励出弯
曲振动。
图8-7 定子行波的产生 a)定子弯曲振动激励 b)驻波合成行波机理
、
8.3.2 电机的工作原理
设A区和B区的驻波振动分别为
a)正面
b)反面
图8-6 压电陶瓷电极布置图
压电陶瓷环的周长为行 波波长的n倍,图中n=9 极化分区可组成三个电极,其中A区和B区表示驱动环形超声波电机的 两相电极,它们利用压电陶瓷的逆压电效应产生振动;而s区是传感器
区,它利用压电陶瓷的正压电效应产生反馈电压,该电压可实时反映
定子的振动情况,其反馈信号可用于控制驱动电源的输出频率。
8.2 超声波电机的运动形成机理
8.2.1 压电效应简介 8.2.2 椭圆运动及其作用
8.2.1压电效应简介
压电效应是由法国的居里兄弟在1880年首先发现的。
正压电效应:对于晶体构造中不存在对称中心的异极晶体,
加在晶体上的应力,除了产生相应的应变以外,还在晶体 中诱发出介质极化或电场。
逆压电效应:若在晶体上施加电场,从而使该晶体产生电
wA A coskx cost wB B cos(kx ) cos(t )
两列驻波叠加可得
(8-3)
(8-4)
w wA wB A coskx cost B cos(kx ) cos(t ) (8-5) 若 A B 0 , , ,则 2 2
8.4.1 速度控制方法
2. 频率控制 调节谐振点附近的频率可以调节电机的速度,频率控制对超声波电 动机最为合适。由于电机工作点在谐振点附近,因此调频具有响应 快的特点。另外,由于工作时谐振频率的漂移,要求有自动跟踪频 率变化的反馈回路。 3. 相位控制 改变两相电压的相位差,可以改变定子表面质点的椭圆运动轨迹, 从而改变电机的转速。这种控制方法的缺点是低速起动困难,驱动 电源设计较复杂。 在以上3种控制方式中,频率控制响应快、易于实现低速起动,应 用得最多。
2
8.2.2椭圆运动及其作用
椭圆运动 转速: 为振动的角 频率 转向: 由振动的相 角超前相转 向滞后相
2
0
2
2
2
椭圆度:
由振动振幅 的差值确定
0
2
2
图8-3 椭圆的形态
8.3 环形行波型超声波电机
8.3.1 电机的结构
图8-5 环形超声波电机转配图
8.3.1 电机的结构
图中的阴影区域为未敷银或对 应部分的敷银层已经被磨去的 小分区,它把压电陶瓷的上下 极板分隔成不同的区域。图8-6 a )中相邻两个压电分区的极 化 方 向 相 反 , 分 别 以 “ +” 和 “ -”表示,在电压激励下一段 收缩,另一段伸长,构成一个 波长的弹性波。
8.1概述
2. 超声波电机的分类 按波的传播方式分类:行波型超声波电机; 驻波型超声波电机。 按转子的运动形式分:旋转型超声波电机; 直线型超声波电机。 按转子运动自由度分:单自由度超声波电机; 多自由度超声波电机。 按定转子接触情况分:接触式超声波电机;
非接触式超声波电机。
本章主要对旋转行波型超声波电机进行分析。
图8-9 典型的运行特性
8.4 行波型超声波电机的驱动与控制
8.4.1 速度控制方法
8.4.2 驱动控制电路
、
8.4.1 速度控制方法
转子运动速度的最大值为
vxmax kh00
条件: A B 0
kh0AB sin
2
2
仅有激励电压不对称时,最大速度为
张。
当在压电体表面施加交变电场时,压电 体中就会激发出某种模态的弹性振动。 当外加电场的交变频率与压电体的机械 谐振频率相同时,压电体就进入谐振状 态,称为压电振子。当振动频率高于
图8-1 逆压电效应示意图
20kHz时,就属于超声振动。
8.2.2椭圆运动及其作用
超声波电机的工作原理:以图 8-2 所示的 电机的转向是由椭圆 运动的转向决定的。
极化,则晶体也将同时出现应变和应力。 正压电效应和逆压电效应统称为压电效应。
超声波电机就是利用逆压电效应进行工作的。
8.2 超声波电机的运动形成机理
在图8-1中,压电材料的极化方向如空心箭头所示,当压电材料
的上下表面施加正向电压,即在材料表面形成上正下负的电场,
则压电材料在长度方面伸张、厚度方面收缩。反之,若在该压电 材料上下表面施加反向电场,则会在长度方向收缩、厚度方向伸
第8章 超声波电机
8.1 概述 8.2 超声波电机的运动形成机理 8.3 环形行波型超声波电机
8.4 行波型超声波电机的驱动与控制
8.5 其他类型的超声波电机 8.6 超声波电机的应用
8.1概述
超声波电机是利用压电材料 (压电陶瓷 )的逆压电效应,把电能转换 为弹性体的超声振动,并通过摩擦传动的方式转换为运动体的回转 或直线运动的新型驱动电机。电机驱动电源的频率一般高于 20kHz, 已超出入耳所能采集到的声波范围,因此称为超声波电机。 超声波电机是典型的机电一体化产品。虽然仅有三十多年的发明和 发展历史,已在航空航天、机器人、精密仪器、医疗设备等诸多领 域已得到了很好的应用。目前仍是国内外开发研究的热点。 1. 超声波电机的特点 (1)低速大转矩。(2)无电磁噪声,电磁兼容性好。(3)响应 快、控制特性好。(4)断电自锁。(5)运行噪声小。(6)结构 形式多样。(7)摩擦损耗大,效率低。(8)寿命短。
从式(8-1)中消去时间 t ,则
2 ux
(8-1)
x2
2uxuy
x y
cos
2 uy
y2
sin 2
(8-2)
n (n 0, 1 , 2, ) 时,两个位移为同相运动,合成轨迹为一直线; n n 时,其轨迹为一椭圆; 时,轨迹为规则椭圆。
w 0 cos(kx t )
沿 x 正向行进的行波。如何得到反向行波?
(8-6)
w 0 cos(kx t )
,取
8.3.2 电机的工作原理
2. 定子表面质点的运动轨迹
在定子的A区和B区施加对称激励电压时,在定子圆环表面的圆周上形
成行波,如图8-8所示。 设弹性体的厚度为h,取 h0
h 。 2
若弹性体表面任一点P在弹性体未 挠曲时的位置为P0,则从P0到P在 z方向的位移为
w h0 (1 cos )
0 cos(kx t )
从P0到P在x方向的位移为
(8-8)
图8-8 定子振动机理
h0 sin h0 h0 kh0 0 sin( kx t ) x
圆旋转运动。当把转子压紧在弹性体表面时,在摩擦力的作用下,
转子就会转动起来。定子表面开槽,是为了加大定子接触部位的 振动速度,提高超声波电机的转换效率,改善电机的性能。
8.3.3转子的运动速度
由式(8-10)可知,在弹性体表面质点沿x方向的运动速度为
质点的运动速度是时间和空间的函数。在椭圆的最高点 , (kx t =0 )
vx kh00 cos( kx t ) t
(8-12)
z 轴方向的位移最大,x 方向的位移等于0。x方向的最大速度为
vxmax kh00
(8-13)