基于单片机的灭火机器人设计
基于 STM32 的智能灭火机器人设计方案

基于STM32 的智能灭火机器人设计方案本系统以stm32微控制器为核心控制单元,以安装在车体两侧红外传感器来循迹,通过声音传感器启动,使用火焰传感器来检测火焰,以温度传感器检测与火源的距离,并用风扇来灭火。
车身主要以相隔30度的五个红外传感器来调整车身的角度,实现了对运动方向的控制,进而躲避障碍物,实现了在规定区域能自主搜索火源并实施灭火的功效。
标签:stm32;传感器;灭火机器人1 系统整体方案设计智能灭火机器人在声音或人工启动后,左右两侧的电机被驱动旋转,小车在前进的过程中,通过两侧夹角固定红外传感器,来调整两轮的转速,是车体达到前行方向,前行过程中实时监测是否有火源存在,若火焰传感器检测到有火源时,向火源靠拢,当与货源达到一定距离时,温度传感器接收到信号,在单片机处理下使风扇转动,直至火源被灭才停止旋转,然后继续寻找下一火源。
系统总体设计框图如图1。
2 系统硬件设计2.1 结构设计在综合考虑工作受地面摩擦、机器人惯性、机器人电机的转数差、齿轮箱与轮子的摩擦、电压变化等多个因素影响后,为了方便小车在前进过程中,能够直线前进,且没有左右较大的晃动,而且能够平稳转弯,我们采用圆形车体,两电机驱动,前后各安装一个万向轮。
车体主要由电路板,车底盘,风扇架,车轮等构成,为了更加节省车体空间,我们在设计电路板时,将稳压芯片,电机驱动,stm32芯片都焊接在一块板子上,使整个车体看起来更整洁更美观。
在车体前方安装5个红外传感器,并且距中心红外各岔开30度,将两个传感器放在车盘后面,距中心岔开60度。
这样能够使探测的范围更大,有利于对墙壁的探测。
红外的距离大概8cm,经过检测,这样车体能够最快修正,更加平稳。
电池放于车底盘下面,将车的重心降低,更有利于车体稳定。
将风扇提高能够略高于火源,而温度传感器与火焰传感器一般与火源同等高度,风扇要有大概10度的向下倾角,这样就能保证最大范围的灭火。
2.2 电源管理模块设计电源管理模块包括稳压模块与驱动模块。
基于单片机的轮式灭火机器人设计

160研究与探索Research and Exploration ·工艺与技术中国设备工程 2018.03 (下)随着科学技术的不断发展,机器人在工业生产和日常生活中应用越来越广泛。
轮式驱动的机器人作为比较常见的形式之一,属于移动机器人的一类,具有运动效率高、稳定性强、可搭载性强、可扩展性强等一系列优点,在AGV、救援机器人、探测机器人等领域有着广泛的实践。
在未来的机器人发展过程中,移动机器人将拥有广阔的应用前景。
本文设计的一款以单片机作为控制核心,能够实现对某小型火场进行火源自动寻找和自动灭火的功能。
1 机器人整体结构设计轮式灭火机器人以89S52为控制核心,在寻找火源的过程中以光电传感器实现避障,同时通过红外传感器实现对火源的探测,当发现火源后,采用喷水系统作为灭火手段,以实现精准定位火场、高效实施灭火的功能。
单片机作为常用的系统控制核心,具有体积小、成本低、可扩展性强、编程简便等特点,适用于小型电子系统的开发与应用,故本系统选择单片机为系统控制核心。
火光中包含红外线,故选用红外传感器作为火焰的检测手段。
在机器人移动中,会遇到障碍,选择光电传感器对障碍物进行检测,当检测到障碍时将信号传送至单片机后,由单片机发出指令实现机器人的避障。
如图1所示为轮式灭火机器人整体结构框图。
系统前向通道包含2类传感器,即红外传感器和光电开关传感器;后向通道包含2类执行器,分别是灭火系统执行器和直流减速电机。
本系统中,运动功能是轮式机器人的关键功能之一,只有首先实现轮式机器人的运动功能,才能在此基础上实现检测、避障和灭火等功能。
本设计选用双减速电机作为轮式机器人的驱动方式。
减速电机具有扭矩大的特点,在执行灭火和避障任务时具有一定的优势。
2 硬件电路设计2.1 多路电源电路设计系统多路电源模块的功能是为轮式机器人中各个系统提供稳压电源:光电开关传感器供电电压为+5V;红外传感器供电电压为+5V;最小系统供电电压为+5V;直流电机驱动供电电压为+24V;小型喷水灭火系统供电电压为+24V。
基于MSP430的小车式灭火机器人设计

摘
要: 本 设 计 是 以 MS P 4 3 0 F 1 4 9单 片 机 为 核 心 的小 车 式 灭 火 报 警 机 器 人 , 通 过 红 外 火 焰 传 感 器 的数 字 输 出进 行 火 源 寻 找 ,
并 根 据 采 集 到 的信 号 对 行 进 方 向进 行 调整 , 同时 利 用 红 外 对 管 实 现 机 器 人 避 障 。 机 器 人 行 进 过 程 中 能 够 依 据 火 焰 传 感 器 的
a c c o r d i n g t o t h e c o l l e c t e d s i g n a l , a n d a v o i d o b s t a c l e s wi t h i n f r a r e d c o u n t e r t u b e a t t h e s a me t i me .Th e r o b o t c a n e s t i ma t e t h e d i s t a n c e b e t we e n t h e r o b o t a n d t h e f i r e a c c o r d i n g t O t h e a n a l o g o u t pu t o f t h e i n f r a r e d f l a me s e n s o r , a n d d e t e c t a mb i e n t
Ab s t r a c t :The d e s i g n i s b a s e d o n t h e M SP4 3 0 F1 4 9 s i n g l e c h i p mi c r o c o mp u t e r wh i c h i s t h e c o r e o f t h e c a r - t y p e f i r e f i g h t —
基于单片机的灭火机器人设计
基于单片机的灭火机器人设计摘要该文设计是一款基于单片机的灭火机器人模型的设计。
该设计以STC89C52单片机为控制核心的系统,通过自制火焰传感器用于火焰探测,红外光电传感器用于探测障碍物,L298驱动电机前后转动实现机器人平面运动。
该系统火焰探测采用自制的六路火焰传感器,其中是由五路远红外接收二极管和一路近红外接收二极管构成,它与目前其他火焰探测器相比,具有火焰探测精确度相对高、结构较为简单,性能可靠等优点。
避障则用E18-D50NK型号的光电传感器,该传感器具有探测距离远、受可见光干扰小、价格便宜、易于装配、使用方便等特点。
此设计以数字集成电路技术为基础并以单片机技术为核心,依据传感器的信号传入单片机实现各种指令处理。
实验结果表明,该设计具有成本低、可靠性高、灭火速度快、安装调试方便等特征,具有较好的应用前景。
关键词:STC89C52单片机光敏晶体管红外光电开关 L298N E18-D50NKFire fighting robot hardware design based on single chip microcomputerAbstractIn this paper, the design model for the design of a microcontroller-based fire-fighting robot. System to STC89C52RC microcontroller for control core, innovation homemade flame sensor is used to measure the source of fire, use infrared receiverdiode to detect the roadblock.The system use six innovation homemade flame sensors which consist of five remote Infrared receiverdiodes and one close Infrared receiverdiode to measure the source of fire,which compare other measurements with high precision, simple structure, reliable performance characteristics. Obstacle avoidance uses the E18 - D50NK models of photoelectric sensor, the sensor has a long detection distance, small interference by visible light, the price is cheap, easy to assemble and convenient use, etc. This design is based on digital integrated circuit technology and single-chip microcomputer technology as the core, according to the sensor signal to microcontroller processing all kinds of instructions.The experimental results show that the design of low cost, high reliability, fire fast, easy installation features, very suitable for large fire risk coefficient, has a good application prospect.Keywords:STC89C52 microcontroller; photosensitive transistor; infrared photoelectric switch; L298N;E18-D50NK目录摘要 (I)Abstract (II)第一章引言 (1)1.1 课题的开发背景 (1)1.2 课题的研究现状 (1)1.3课题研究的意义................................. 错误!未定义书签。
一款基于STM32的智能灭火机器人设计
一款基于STM32的智能灭火机器人设计
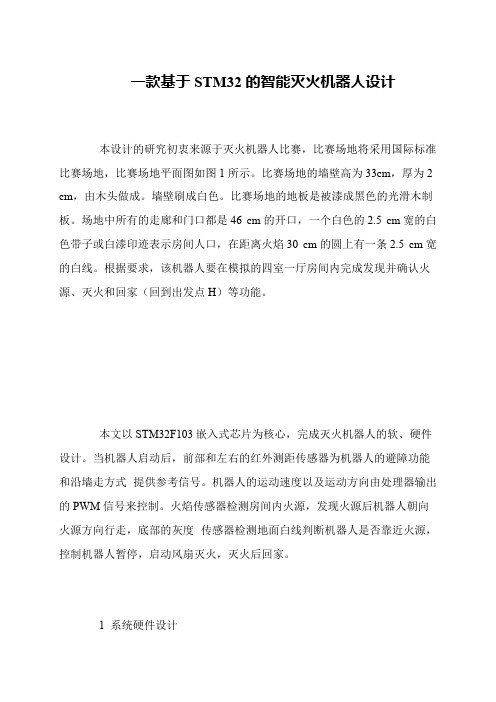
本设计的研究初衷来源于灭火机器人比赛,比赛场地将采用国际标准比赛场地,比赛场地平面图如图1所示。
比赛场地的墙壁高为33cm,厚为2 cm,由木头做成。
墙壁刷成白色。
比赛场地的地板是被漆成黑色的光滑木制板。
场地中所有的走廊和门口都是46 cm的开口,一个白色的2.5 cm宽的白色带子或白漆印迹表示房间人口,在距离火焰30 cm的圆上有一条2.5 cm宽的白线。
根据要求,该机器人要在模拟的四室一厅房间内完成发现并确认火源、灭火和回家(回到出发点H)等功能。
本文以STM32F103嵌入式芯片为核心,完成灭火机器人的软、硬件设计。
当机器人启动后,前部和左右的红外测距传感器为机器人的避障功能和沿墙走方式提供参考信号。
机器人的运动速度以及运动方向由处理器输出的PWM信号来控制。
火焰传感器检测房间内火源,发现火源后机器人朝向火源方向行走,底部的灰度传感器检测地面白线判断机器人是否靠近火源,控制机器人暂停,启动风扇灭火,灭火后回家。
1 系统硬件设计。
基于单片机的灭火机器人控制系统设计与实1

超声波传感器
超声波传感器可以测量 3~200cm 范围内的物体的距离, 并通过模拟信号连接到 控制器上。精度高达1cm,并且非 常稳定。直观易与使用。机器人的启动我们是用声音启动。 通过超声波传感器进行启动,当声音达到一定的分贝的时 候,控制器通过超声波感性到的声音进行寻火。
超声波传感器参数:
致谢
在毕业设计期间,我很感谢宋老师的耐心指导和细心教导, 这使我对灭火机器人有了新的认识和更系统的学习,也感 谢我们学校给我提供这么好的机会进行学习,并提高自己 的专业能力和心理素质。感谢大家的帮助。让我能够如期 完成毕业论文。
软件介绍
我们在编程的时候使用c语言编程,用的软件是VJCstudio 进行程序的编写和修改,这款软件是在 VC6.0基础 上进行修改的。在 c程序进行编写的时候软件可以现实错 误说在地址和原因,我们可以有目的的去修改和改进。软 件具有简单易懂,易学好用的特点。
调试
先将底盘上的电机位置固定,连接控制器,在给固定的直 流电源,使底盘能够向直线行走和转弯,分别调试红外寻 线板和红外避障电路,使有反射光接收到后使信号输出为 一个高电平,供控制器进行检测。在安装好以上模块后, 再检查一次,保证位置合理,能正常得检测到外部情况。
2015 基于单片机的灭火机器人控制系统设计与 实现
指导老师:
姓 专 名 :
王亦军
于德春
业 :电气工程及其自动化
主要内容
设计来源背景说明
研究目的与意义 硬件介绍 软件介绍 调试
课题来源
在人类文明的悠久长河中,对机器人的梦想和追
求已有 3000 多年的历史。今天人类已经步入信息
基于单片机系统的无人环境灭火机器人的设计与实现

基于单片机系统的无人环境灭火机器人的设计与实现一、背景介绍随着现代化城市的建设,大量高楼大厦的发展已经成为了城市化进程中的一个重要标志,但与此同时,高楼大厦在建筑结构方面的设计复杂度也随之增加,这就给防火工作带来了极大的挑战。
当前,传统的火灾处理方式主要由消防员进行,但由于高楼的高度和结构的复杂性,人工防火存在着一定的缺陷和局限性。
如今,随着无人技术的发展,无人环境灭火机器人越来越受到人们的关注,它可以解决高楼防火难题,为人们的生命安全提供切实的保障。
二、设计方案无人环境灭火机器人系统主要采用基于单片机的控制器实现智能控制,其中包括雷达传感器、控制器、电池等组件。
在机器人的底部安装有两个轮子和一个悬挂支架,支架上安装有一种消防喷洒器械,当机器人探测到火焰时,机器人会自动移动到火灾现场并开始进行灭火。
机器人底部材料应该由具有良好散热性和高强度的金属制成,以确保机器人的稳定性和使用寿命。
三、实现流程1. 雷达传感器探测到火灾场景信号2. 控制器接收到输入信号进行信号处理3. 控制器根据处理结果控制机器人移动至火灾场景进行灭火4. 机器人利用喷洒器械进行喷洒,将消防液体喷洒至火场上以达到灭火的目的5. 当火场被消灭后,机器人自动返回基地并待机四、关键技术1. 火灾场景的探测技术:机器人所使用的探测技术必须能够精准地探测到火灾位置和范围。
此处可以采用红外线、热成像和光学技术,使机器人可以迅速准确地找到并灭火火源。
2. 智能控制技术:基于单片机实现智能控制,包括机器人方向控制、喷洒控制等功能的实现。
3. 机器人结构设计技术:机器人底部的材料应该具有良好的散热性和高强度,机器人的重量、体积、稳定性等方面都需要进行充分考虑和设计。
4. 喷洒器械设计技术:喷洒器械需要具备高效喷洒、均匀喷洒等特点,同时需要考虑机器人悬挂装置的稳定性和支撑能力。
五、总结此设计可以有效地替代传统的人工消防灭火,为高层建筑提供更好的消防保障。
基于单片机的智能灭火报警机器人设计和实现

基于单片机的智能灭火报警机器人设计和实现摘要随着科技的发展、社会的进步,人类不断创造着奇迹,工业的生产跟管理一步一步的前进,不断的创新。
多数控制和管理走进了自动化、信息化、智能化,智能化已经变成了科技发展的主要技术。
在很多工厂车间、工作现场环境比较恶劣的时候,人工不能完成的任务像货物的运输,寻找火源,灭火等,可以采用智能机器人来完成相应的任务,不但省时间,而且省人力。
根据工厂车间的实际日常需要,维持车间的正常运转,研究跟开发智能灭火报警机器人便具有了重大的意义。
本设计主要研究了智能的消防技术,智能机器人以AT89C52单片机为MCU,加上电源电路、驱动电路、火焰传感电路、红外传感器、灭火风扇、蜂鸣器以及其他电路组成。
电源电路为机器人正常工作提供了所需要的电能,驱动电路为机器人提供了可控制的移动,火焰传感电路是发现火源的主要硬件,红外传感器主要判断路况,灭火风扇完成灭火,蜂鸣器用来报警。
本作品对硬件组成进行了设计,并编写了软件程序框图,设计的机器人具有简单的灭火功能,实现了现场灭火。
关键词:AT89C52,驱动模块,单片机,火焰传感器IAbstractDesign of Intelligent of Elimination of FlameAlarm Robot on MCUAbstractWith the development of science and technology, social progress, human beings continue to create miracles with the management of industrial production forward step by step , and constant innovation . Most of the control and management into the automation, information, intelligence , intelligence has become a major technical technological development. In many factory workshop, job site environment is bad , I can not complete the task as artificial transport of goods , looking for the source of fire , fire , etc. , you can use intelligent robots to accomplish the task , not only save time, but also the provincial manpower. According to the actual needs of the factory floor daily to maintain the normal operation of the plant , with the development of intelligent fire alarm research robot will have a great significance.The intelligent design of the main study fire protection technology , intelligent robots to AT89C52 microcontroller MCU, plus the power supply circuit , driver circuit, flame sensing circuit , infrared sensors, fire fans, buzzers , and other circuit components. Providing the power to work the robot needs, provides the driving circuit of the mobile robot can be controlled , the flame sensing circuit hardware is found primarily an ignition source , the main infrared sensor to judge the road, the fire extinguishing power supply circuit for the fan to complete , with the buzzer to the police. The work on the hardware components were designed and prepared a block diagram of a software program to design robots with simple extinguishing function to achieve a live fire.Key words: The AT89C52,Driver Module,MCU,Flame sensor目录摘要 (I)ABSTRACT (II)第1章 绪论 (1)1.1智能灭火报警机器人的设计背景和意义 (1)1.2智能灭火报警机器人的目标 (1)1.3主要内容 (1)第2章 智能灭火机器人系统设计介绍 (2)2.1智能报警灭火机器人系统功能概述 (2)2.2系统工作原理 (2)2.3系统整体方案选择 (3)2.3.1 MCU的选择 (3)2.3.2 传感器的选择 (4)2.3.3 电源模块的选择 (5)2.4系统硬件总体设计 (6)2.5系统软件总体设计 (6)2.6本章小结 (6)第3章 系统硬件设计 (7)3.1电源模块 (7)3.2AT89C52与核心模块 (7)3.2.1AT89C52单片机介绍 (7)3.2.2 AT89C52最小系统硬件电路 (9)3.3电机驱动电路的设计 (9)3.4循迹与控制电路 (12)3.5.1红外测温传感器 (14)3.5.2红外测温传感器引脚 (15)3.6蜂鸣器报警电路 (16)3.7灭火风扇设计 (17)第4章 系统软件设计 (18)4.1软件开发平台介绍 (18)4.2PWM(脉宽调制) (18)4.3软件设计思路 (19)4.4系统主程序流程图 (20)4.5循迹程序流程图 (20)4.6电机驱动模块流程图 (21)4.7报警及灭火控制程序 (23)4.8避障程序流程图 (24)4.9本章总结 (25)第5章 系统功能调试 (26)5.1测试仪器及设备 (26)5.2功能测试 (26)5.2.1电源线路连接测试 (26)5.2.2 循迹功能测试 (26)5.2.3 避障功能测试 (27)5.2.4 灭火及报警功能测试 (27)5.3调试心得 (27)第6章 系统部分模块代码 (28)6.1初始化程序代码 (28)6.3延迟函数代码 (29)第7章 结 论 (30)参考文献 (31)致谢 (32)附录A (33)附录B (35)第1章 绪论1.1 智能灭火报警机器人的设计背景和意义在现实生活中,火灾是非常普遍的,被称作是三大自然灾害之一。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于单片机的灭火机器人设计摘要该文设计是一款基于单片机的灭火机器人模型的设计。
该设计以STC89C52单片机为控制核心的系统,通过自制火焰传感器用于火焰探测,红外光电传感器用于探测障碍物,L298驱动电机前后转动实现机器人平面运动。
该系统火焰探测采用自制的六路火焰传感器,其中是由五路远红外接收二极管和一路近红外接收二极管构成,它与目前其他火焰探测器相比,具有火焰探测精确度相对高、结构较为简单,性能可靠等优点。
避障则用E18-D50NK型号的光电传感器,该传感器具有探测距离远、受可见光干扰小、价格便宜、易于装配、使用方便等特点。
此设计以数字集成电路技术为基础并以单片机技术为核心,依据传感器的信号传入单片机实现各种指令处理。
实验结果表明,该设计具有成本低、可靠性高、灭火速度快、安装调试方便等特征,具有较好的应用前景。
关键词:STC89C52单片机光敏晶体管红外光电开关 L298N E18-D50NKFire fighting robot hardware design based on single chip microcomputerAbstractIn this paper, the design model for the design of a microcontroller-based fire-fighting robot. System to STC89C52RC microcontroller for control core, innovation homemade flame sensor is used to measure the source of fire, use infrared receiverdiode to detect the roadblock.The system use six innovation homemade flame sensors which consist of five remote Infrared receiverdiodes and one close Infrared receiverdiode to measure the source of fire,which compare other measurements with high precision, simple structure, reliable performance characteristics. Obstacle avoidance uses the E18 - D50NK models of photoelectric sensor, the sensor has a long detection distance, small interference by visible light, the price is cheap, easy to assemble and convenient use, etc. This design is based on digital integrated circuit technology and single-chip microcomputer technology as the core, according to the sensor signal to microcontroller processing all kinds of instructions.The experimental results show that the design of low cost, high reliability, fire fast, easy installation features, very suitable for large fire risk coefficient, has a good application prospect.Keywords:STC89C52 microcontroller; photosensitive transistor; infrared photoelectric switch; L298N;E18-D50NK目录摘要 (I)Abstract (II)第一章引言 (1)1.1 课题的开发背景 (1)1.2 课题的研究现状 (1)1.3课题研究的意义................................. 错误!未定义书签。
1.4课题任务 (2)第二章系统基本原理与总体方案设计 (3)2.1 灭火机器人的基本原理 (3)2.2 灭火机器人的整体设计 (3)2.3 灭火机器人模型的测量方案 (4)2.3.1 避障模块 (4)2.3.2 火焰检测方案 (5)第三章系统硬件电路设计 (8)3.1 控制电路 (8)3.1.1 电机控制电路 (8)3.1.2 灭火驱动电路 (9)3.2 火焰检测电路 (11)3.3避障模块 (13)3.4 直流电源设计 (15)3.5 单片机系统 (15)3.5.1 单片机选型 (15)3.5.2 单片机晶振电路和复位电路 (18)第四章系统调试 (20)4.1 硬件调试 (20)4.2 软件调试....................................... 错误!未定义书签。
4.3避障的实现 (21)4.4 寻找火源的实现 (21)4.5 遇到的问题 (22)4.6 实验现象与结果分析 (22)4.7 本章小结 (26)4.8 实物展示 (27)参考文献 (30)致谢 (31)附录 (32)南京工业大学本科毕业设计(论文)第一章引言1.1课题的开发背景正如我们所知,火灾在现实生活中是非常普遍的,它被称为三大自然灾害之一。
随着经济的快速发展,不可避免的火灾在各种危险场所频繁出现,给社会安全造成了很多隐患。
如果发生灾害事故,消防员所面临的环境是高温、黑暗、有毒和浓烟等,若没有相应的设备贸然冲进现场,不仅不会完成任务,可能会徒增人员伤亡,这方面公安消防部队已历经诸多血的教训。
尤其是当新消防法出台后,抢险救援已成为公安消防部队的法定任务,面对新时期面临的新情况新任务,也为了更好地解决前述难题,显得日益重要是消防机器人的配备。
消防部队将面对的火灾和应急救援的形势相当复杂。
尤其是在高温、有毒、易燃易爆等复杂环境中,为切实增强消防部队扑救大火的能力,也为更好地保护广大官兵的生命安全,配备消防机器人已势在必行。
1.2课题的研究现状智能小车方面:智能小车,也称轮式机器人,是一种以汽车电子为背景,涵盖控制、模式识别、传感技术、电子、电气、计算机、机械等多学科的科技创意性设计。
智能汽车作为一种智能化的交通工具,体现了车辆工程、人工智能、自动控制、计算机等多个学科领域理论技术的交叉和综合,是未来汽车发展的趋势。
机器人技术方面:目前已经开发出了多种类型机器人机构,其结构有串联、并联及垂直关节和平面关节多种。
目前研究重点是机器人新的结构、功能及可实现性,其目的是使机器功能更强、柔性更大、满足不同目的的需求。
同时机器人机构向着模块化、可重构方向发展。
机器人控制技术现已实现了机器人的全数字化控制,基于传感器的控制技术已取得了重大进展。
目前重点研究开放式、模块化控制系统,人机界面更加友好,具有良好的语言及图形编辑界面。
同时机器人的控制器的标准化和网络化以及基于PC机网络式控制器已成为研究热点。
机器人已经实现了全数字交流伺服驱动控制,绝对位置反馈。
目前正研究利用计算机技术,探索高效的控制驱动算法,提高系统的响应速度和控制精度;同时利用现场总线技术,实现的分布式控制[1]。
第一章引言1.3课题研究的意义智能避障灭火机器人实现了对安全防护的质的提高,也大大地减低了消防人员的危险。
在智能灭火系统中应用单片机来代替人的思考,还可以实现自动化控制,简化了灭火的工作流程,使单片机代替多余的消防人员,节省了国家不必要的支出,降低了危险。
自动灭火避障智能小车可以理解为机器人的一种特例,它是一种能够通过编程手段完成特定任务的小型化机器人。
与普遍意义上的机器人相比该智能小车制作成本低廉,电路结构简单,程序调试方便,此设计在前人研究的基础上,通过不断地学习相关的知识,力求对消防机器人设计达到更深的了解和研究,促进消防机器人在火灾中的应用并推广在相关领域的研究,使消防研究工作不断向前发展,具有很大的学术价值。
1.4课题任务根据自动控制的基本要求,自动灭火避障智能小车必须在无人干预的情况下依靠处理器自动完成所有的系统设计要求。
灭火通过火焰检测传感器找到蜡烛,控制电机引导小车走向蜡烛附近并吹灭蜡烛。
自动避障通过红外光电开关感应前方的障碍物,程序判断处理控制小车转弯避开障碍物。
系统具体设计要求如下:(1)实现直流减速电机的启、停、正、反控制;(2)利用直流减速电机实现对小车的运动控制;(3)利用稳压芯片为单片机电路系统提供稳定电压;(4)利用红外线光电开关对障碍物的检测;(5)利用光敏晶体管对火源的检测;(6)通过单片机控制小车运动状态实现小车的灭火避障;(7)通过编程检验系统程序的模块化设计。
南京工业大学本科毕业设计(论文)第二章系统基本原理与总体方案设计2.1灭火机器人的基本原理灭火机器人灭火原理如图2-1所示。
单片机采集火焰检测模块和避障模块的信号,通过控制电机驱动模块使小车避障行驶去找寻火源,在找到火源之后,单片机控制电机停止,开启风扇灭火,从而实现对整个火灾点灭火的过程。
图2-1系统原理图方框图2.2 灭火机器人的整体设计灭火机器人由四部分组成:(1)数据采集模块,主要由火焰采集模块和避障模块构成,实现了灭火机器人的对各类参数的采集,是控制器核心部分;(2)信息处理单元,用单片机作为信息处理单元,实现对数据的采样及数据分析运算,并发出控制指令;(3)人机交互单元,由按键,显示灯组成。
按键实现人机交互;可以提供丰富、直观、友好的信息界面;(4)控制模块,控制模块主要由电机驱动电路、灭火模块等组成,实现对驱动电机运转及开启风扇灭火。
第二章系统基本原理与总体方案设计图2-2 灭火机器人系统设计图2-2中,数据采集模块对障碍物方位、火焰数据进行采集,并将数据送给MCU进行数据处理。
MCU根据接收的信息发出控制指令控制电机或风扇工作,按键用于用户启动灭火机器人。
2.3 灭火机器人模型的测量方案避障及火焰测量是灭火机器人最重要部分之一,它是实现其他功能的基本条件,这一部分性能好坏将关系到整个系统的性能,所以设计一个成本低、可靠性高、灭火效率高、调试简便的测量方案是该设计的关键。
2.3.1避障模块方案1:用超声波传感器进行避障。