基于ADAMS的四自由度机械手运动学仿真
基于ADAMS的液压驱动四足机器人步态规划与仿真

tr a ba e . es l o eut eie tefaiit o eg i pa nn ds u tr ds , esv o t n dT i  ̄i rsl v r s h e bly f t at l ig a t cue ei e i h mu n f s i h n n r g n w i r ie f rn ef rh eet no h da l y n e de g e hc po d s eeec s o esl i y r i cl d r n / . h v r t co f u c i a n n
Ke r sQu d u e b tHy rui Dr e ; iPa nn ; DA yWo d : a r p dRo o ; d a l i d Gat ln ig A MS c v
ቤተ መጻሕፍቲ ባይዱ
中图分 类号 :H1 ,P 4 文 献标识 码 : T 6T 22 A
1 引言
四足机器人可以通过选择合适 的落地点 ,既能以静态 步行
机 械 设 计 与 制 造
10 0 Ma h n r De in c iey sg & M a fc u e nu a t r
第 7期 21 0 2年 7月
文章编 号:0 13 9 (0 2 0 — 10 0 10 — 9 7 2 1 )7 0 0 — 3
. T ● t ● t t
【 btat orai erbt i a n i dpait o a igo euee ruda A s c】T elet oo ̄hg l dadhg aat ly fw kn nt nvngon , r z h ho h b i l h
h da l r e udu e o o i d s nd w ohs tes u tr o s l it ad m r m t n y rui di n q arp d rb t s ei e , h a h t cue f l s e j ns n oe oi c v g r e g o o sae.nteb eo n ls tem c aia s utr , ido dao a g i i ds e n ed — pcs a O h s fa a i o h eh nc t cueakn i n ats ei da dt y ys f l r f g l g n h n m cw kn e air eq a r e b t ntego n i l e sn D MST edsl e e t a i a igb h v t u u dr o o u di s  ̄ dui A A . i a m n l oo h f d p o hr s mu g h pc Q rbtScne asteh da l y n e r i fre w l 厂 o o’ e tr m s, y rui c l d r i n oc el f o h c i dvg tecnatoc e e nte h o t reb t e cf w h
基于ADAMS的多关节机械手手抓部分的运动学仿真研究

的多关节机械手手抓部分的其中,nh是约束方程的个数;nc是广义坐标数。
于是可以得到系统速度的约束方程:(4)。
任意时刻t的速度,加速度可以由线性方程的数值方法求解,在ADAMS中通常采用图1 机械手三维装配三维模型的建立虚拟样机的三维模型的建立采用Solid完成,主要包括手抓、底座、大臂机构、小臂机构等,底座上有一电动机带动,实现大臂的转动。
大臂及其小臂的活动主要由液压缸带动,本文重点介绍机械手手抓部分的运动学分析,图2是机械手的三维装配图。
图2 手抓部分装配图立模型过程中遵循的原则。
建立模型之后,导入ADAMS化处理,在满足虚拟样机仿三维模型的建立要尽可能地数量应该尽可能的少,只保留基本的运动部件。
(2)机械手的结构及其分析。
本机械手实现的运动是平均每分钟抓取4次,旋转的角度是是机械手的机构运动简图,电动机带动齿轮转动,实现底座的转动,抓取物料时,由手抓图3 机械手机构运动简图机械手手抓的模型简化及其导入ADAMS中遵循模型的简化原则,将手抓的三维模型简化,模型建立部分使用Solid Edge ST5实现,ADAMA/View提供的Parasolid模型数据交换接口,将模ADAMS软件中。
导入后为模型的每个零件重命名和添加材料属性(steel)。
鉴于本文只研究机械手手抓部分的运动,故将删除了模型中与小臂链接的链接底座、前后缸盖以及套筒等的结构,完成简化后,为了使各个相对运动的部分形成有机的整体,根据构件之间相对运动,在模型中的利用ADAMS/View中的约束工具为各个构件之间引入约束。
图为导入ADAMS后的模型图。
图4 手抓简化仿真模型机械手手抓部分的仿真 机械手的手抓部分是机械手设计的重要部分,也是实现机械工作的必要条件,设计的目的是机械手每分钟中国设备工程 2024.04(下)图5 机械手手抓部分约束的添加机械手的整个驱动部分选用气压驱动,其中包括大小臂的运动以及手抓的张合,液压驱动最大优点是单位质量输出功率大,因为液压传动的动力元件可以达到很高的工作压力,在同等输出功率下具有体积小、质量轻、运动惯性小、动态性能好的特点。
基于ADAMS的四自由度机械手运动学仿真设计

优秀设计目录1 引言 (1)1.1工业机械手研究现状 (1)1.2工业机械手的功能及应用 (1)1.3本文研究内容及研究意义 (3)2工程机械仿真简介 (3)2.1概述 (3)2.2工程机械仿真的思想、内容和特点 (3)2.3参数化设计概念 (4)2.4工程机械零部件参数化仿真设计 (4)3 PRO/E功能介绍 (5)3.1引言 (5)3.2P RO/E对三维模型的处理 (5)3.2.1 Pro/E的三维模型创建功能 (5)3.2.2 Pro/E建模的一般过程 (6)3.2.3 利用族表实现零件系列化设计 (6)3.3P RO/E的特点及产品外观造型设计 (6)4 ADAMS功能介绍 (9)4.1ADAMS概述 (9)4.2 ADAMS基本功能 (9)4.3ADAMS和P RO/E之间的数据转换 (11)5仿真分析 (12)5.1仿真流程图 (12)5.2模型建立 (13)5.2.1利用Pro/E建立机构模型 (13)5.2.2 ADAMS仿真模型等效转换 (14)5.3ADAMS仿真 (15)5.3.1仿真设置 (15)5.3.2仿真结果 (15)6 运动学分析 (17)6.1建立坐标系 (17)6.2运动学分析 (17)7结束语 (19)参考文献 (20)致谢 .............................................. 错误!未定义书签。
1 引言1.1工业机械手研究现状随着机器人研究的不断深入和机器人领域的不断发展,机器人仿真系统在机器人设计和研究方面,发挥着重要的作用,它可应用于机器人的许多方面,已成为机器人学的一个重要分支。
例如:可帮助研究人员了解机器人工作空间的形态及极限;还能帮助研究人员了解机器人工作空间的形态与合理性;可用于分析检验轨迹规划和作业规划的正确性与合理性;可为离线编程技术的研究提供一种极为有效的验证手段;可以用于实时检测机器人与作业环境之间的碰撞与干涉以保证整个生产单元的安全等。
基于ADAMS的机械四连杆机构运动仿真分析

基于ADAMS的机械四连杆机构运动仿真分析1. 引言1.1 背景介绍机械四连杆机构是一种常见的机械系统,由四个连杆组成,通过铰链连接在一起。
该机构具有简单结构、运动灵活等特点,广泛应用于工程领域中的机械传动系统、转动机械装置等。
随着现代工程技术的发展,人们对机械四连杆机构的运动性能和工作特性提出了更高的要求。
利用ADAMS软件进行机械四连杆机构的运动仿真分析已成为一种常用的研究方法。
通过仿真分析,可以全面地了解机构在不同工况下的运动规律和性能特点,为设计优化和故障分析提供重要依据。
1.2 研究目的本文旨在利用ADAMS软件对机械四连杆机构进行运动仿真分析,探讨其运动规律及特性。
通过建立机构的数学模型,模拟机构在不同工况下的运动状态,分析机构的运动学性能和动力学特性,为设计优化提供理论支持。
借助ADAMS软件的功能,对机构进行参数优化,使机构的性能达到最佳状态。
本文研究的目的包括:1. 分析机械四连杆机构的运动规律,揭示其运动特性;2. 探讨机构在不同工况下的运动状态和特点,评估机构的性能;3. 基于仿真结果,进行参数优化,提高机构的工作效率和稳定性;4. 对机构可能出现的故障进行分析,为机构的维护和保养提供参考。
通过对机械四连杆机构的运动仿真分析,旨在为机械工程师提供设计和优化机构的参考,促进机械系统的创新和发展。
1.3 研究方法研究方法是本文的关键部分,主要包括以下几个步骤:(1)了解ADAMS软件的基本原理和使用方法,包括建模、设置参数、运动仿真等操作。
(2)建立四连杆机构的三维模型,并根据实际情况设置各个连杆的长度、质量、摩擦系数等参数。
(3)设定机构的初始条件和约束条件,如应用驱动力、初始速度、固定关节等,以模拟机构的运动过程。
(4)进行仿真分析,观察四连杆机构在不同驱动力、摩擦系数下的运动情况,包括角速度、位移、加速度等参数的变化。
(5)分析和比较仿真结果,探讨四连杆机构运动特性的影响因素,如摩擦力、驱动力大小、连杆长度等,并对结果进行合理解释。
基于ADAMS的机械四连杆机构运动仿真分析

基于ADAMS的机械四连杆机构运动仿真分析机械四连杆机构是一种常用的机构形式,它广泛应用于各种机械设备中,如汽车发动机、机床、机器人和机械手等。
本文基于ADAMS软件,对机械四连杆机构进行运动仿真分析,并对仿真结果进行分析和讨论。
一、ADAMS软件介绍ADAMS是一款专门用于多体动力学仿真分析的商业软件,它可以用来仿真各种机械系统的动力学特性,包括车辆、飞机、机器人以及各种机械机构等,还可以分析机构的运动轨迹、速度、加速度、力矩等参数。
在本文中,我们将利用ADAMS软件对机械四连杆机构进行仿真分析,探究机构的运动规律和特性。
二、机械四连杆机构的结构和运动特性机械四连杆机构由四个连杆组成,其中两个连杆为机构的输入和输出轴,另外两个连杆则起到连接作用。
机构的结构如图1所示。
图1 机械四连杆机构结构示意图机械四连杆机构的运动特性与其连杆长度、角度以及连接方式等因素密切相关,下面我们将对机构的运动特性进行详细的分析。
1. 运动自由度机械四连杆机构的运动自由度为1,即只有一维平动或旋转方向。
2. 平衡性机械四连杆机构具有良好的平衡性,可以在很大程度上减小机构的惯性力,提高机构的稳定性。
3. 运动规律机械四连杆机构的运动规律比较复杂,难以用解析方法进行求解。
通常采用动力学仿真和实验方法,对机构的运动规律进行研究和分析。
为了探究机械四连杆机构的运动规律和特性,我们利用ADAMS软件对机构进行仿真分析。
仿真模型如图2所示。
在仿真过程中,我们可以通过改变机构的输入参数,如连杆长度、连杆角度等,来观察机构的运动规律和特性。
下面我们将举例说明。
1. 连杆长度变化时机构的运动规律改变机构的输入连杆长度,可以观察到机构的运动规律发生了显著的变化。
当输入连杆长度L1=100mm、L2=200mm时,机构的运动规律如图3所示。
图3 机构运动规律图(L1=100mm、L2=200mm)从图3中可以看出,当输入连杆开始旋转时,机构的输出连杆也随之旋转,但是旋转速度比输入连杆慢,这是由于机构的连杆长度不同,导致机构的角度运动不同所致。
基于ADAMS固定作业机器人运动仿真

要求 ,实 现抓 取 、搬 运工 件或操 纵工 具 ,是典 型 的机 电一体 化产 品 ,在实 现柔性 制 造 、提高产 品质 量 、代 替人 在恶 劣环境 下工 作等 方面 发挥 着重要 作用 。利用
虚拟 样机 技术 可 以在 设计 阶段 预测 产 品的性能 ,优 化 产 品的设计 ,进 行运 动学 以及 动力 学仿 真 。本 设计 就
的角度 , 。 示升 降缸活 塞上 升 的位移 , 。 d表 d 表示伸缩
缸 的伸 缩位移 , d 表示 o 到伸 缩缸 初始位 置 的距离 , 表示 手腕 转过 的角度 。
图 1 机 器 人 结 构 示 意 圈
机 器人 的运 动学分 析是运 动仿 真 的基础 ,通过 求 解运 动 学方程 的正 、逆解 ,得 到机 器人 手爪 位姿与关
维普资讯
・3 O・
机 械 工 程 与 自 动 化
20 0 6年 第 6 期
节 变量 的关 系 。正解 相对 简单 , 解 采用 P u 等 人提 逆 al 出的反 变换法 。
衰 1 固定作 业机器人 的连杆参数
a 1 i
1 2
更 直观 地 观察 运行 结果 。
2 机器 人实体 模 型的 构造 AD AMS软 件本 身 的三维 建模 功能 不强 ,只能 构
造 一些 简单 的和不 精 确 的模 型 。AD AMS软件有 很 多
专业 模块 , 中 ME HANIM/ r ( r / 其 C S P o P o E接 口) 模块
1 固定 作业 机器 人的 结构
固定 作业 机器 人 的结构示 意 图见 图 1 ,该机 器人
基于ADAMS的多自由度机器人汽车天窗检测运动学仿真
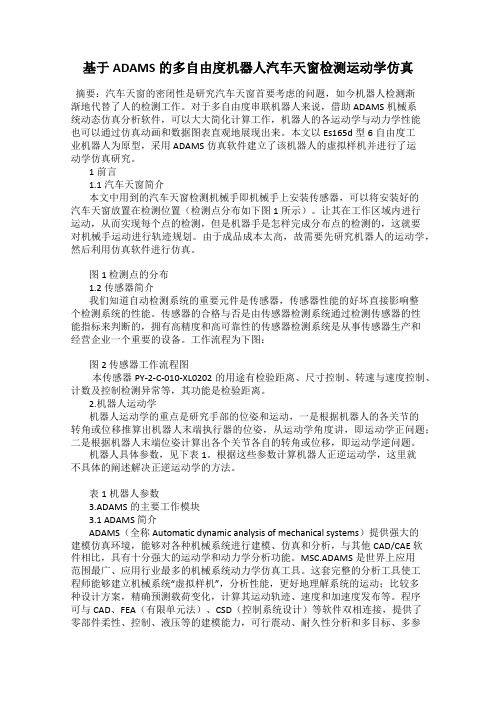
基于ADAMS的多自由度机器人汽车天窗检测运动学仿真摘要:汽车天窗的密闭性是研究汽车天窗首要考虑的问题,如今机器人检测渐渐地代替了人的检测工作。
对于多自由度串联机器人来说,借助ADAMS机械系统动态仿真分析软件,可以大大简化计算工作,机器人的各运动学与动力学性能也可以通过仿真动画和数据图表直观地展现出来。
本文以Es165d型6自由度工业机器人为原型,采用 ADAMS仿真软件建立了该机器人的虚拟样机并进行了运动学仿真研究。
1前言1.1汽车天窗简介本文中用到的汽车天窗检测机械手即机械手上安装传感器,可以将安装好的汽车天窗放置在检测位置(检测点分布如下图1所示)。
让其在工作区域内进行运动,从而实现每个点的检测,但是机器手是怎样完成分布点的检测的,这就要对机械手运动进行轨迹规划。
由于成品成本太高,故需要先研究机器人的运动学,然后利用仿真软件进行仿真。
图1 检测点的分布1.2 传感器简介我们知道自动检测系统的重要元件是传感器,传感器性能的好坏直接影响整个检测系统的性能。
传感器的合格与否是由传感器检测系统通过检测传感器的性能指标来判断的,拥有高精度和高可靠性的传感器检测系统是从事传感器生产和经营企业一个重要的设备。
工作流程为下图:图2 传感器工作流程图本传感器PY-2-C-010-XL0202的用途有检验距离、尺寸控制、转速与速度控制、计数及控制检测异常等,其功能是检验距离。
2.机器人运动学机器人运动学的重点是研究手部的位姿和运动,一是根据机器人的各关节的转角或位移推算出机器人末端执行器的位姿,从运动学角度讲,即运动学正问题;二是根据机器人末端位姿计算出各个关节各自的转角或位移,即运动学逆问题。
机器人具体参数,见下表1。
根据这些参数计算机器人正逆运动学,这里就不具体的阐述解决正逆运动学的方法。
表1机器人参数3.ADAMS的主要工作模块3.1 ADAMS 简介ADAMS(全称Automatic dynamic analysis of mechanical systems)提供强大的建模仿真环境,能够对各种机械系统进行建模、仿真和分析,与其他CAD/CAE 软件相比,具有十分强大的运动学和动力学分析功能。
基于Adams的管道施工机械手虚拟样机建模与动力学仿真
收稿日期:2012-09-12基金项目:辽宁省教育厅科研项目资助(L2012211)作者简介:王丹(1977-),博士研究生,副教授,研究方向为建筑工程用机器人技术与建筑机械,wangdan_17@ ;柳洪义(联系人),教授,博士,hyliu@基于Adams 的管道施工机械手虚拟样机建模与动力学仿真实验王丹1,2,柳洪义1,刘明晨2,张胜男2(1东北大学 机械工程与自动化学院,沈阳 110004;2沈阳建筑大学 交通与机械工程学院,沈阳 110168)摘 要:管道施工机械手用于铺设地下大型水泥管道。
为了能够准确模拟机械手的工作过程,为物理样机的设计和制造提供参数依据,采用Solidworks 、Adams 建立机械手虚拟样机的联合建模方法。
为了能够实现仿真过程与实际工作状态的高度一致,保证仿真结果准确反映实际工况,在虚拟样机的运动副中添加外力等效摩擦力,对油缸铰接销轴柔性处理,以及添加过渡轴解决冗余约束等。
对机械手虚拟样机进行了管道对接过程的动力学仿真,提取了相关仿真数据,并与实验样机的实验数据进行了对比。
结果表明:仿真模型基本与实验样机相符,仿真数据基本准确、可靠,能为样机的制造提供基本设计参数。
关键词:管道施工机械手 虚拟样机建模 动力学仿真 中图分类号:TP241.3 文献标识码:AVirtual Prototype Model of the Laying Pipe Manipulator andDynamics Simulation Based on Adams Soft and TestWang Dan 1,2, Liu Hongyi 1, Liu Mingchen 2, Zhang Shengnan 2(1School of Mechanical Engineering and Automation, Northeastern University, Shenyang 110004; 2School of Transportation and Mechanical Engineering, Shengyang Jianzhu University, Shengyang 110168)Abstract :The laying pipe manipulator is used to lay the concrete pipe. In order to simulate the working process of the manipulator correctly, and support the parameters for the prototype, the virtual prototype of the manipulator was built with Solidworks and Adams soft. To make the simulation keep up with the real working process, and the simulation results reflect the working conditions accurately, the force was added to replace the friction in the kinematic pair, the pin shaft of the cyinder was made flexible, and the connecting shaft was added to resolve the redundant constraint of wheel. The virtual prototype of the manipulator could realize the dynamics simulation of the laying pipe process, and the simulation results was compared with the test results,which showed that the virtual prototype of the manipulator was similar with the prototype,and the simulation results were correct,and it could support the design parameters for the prototype. Key words :the laying pipe manipulator; virtual prototype model;dynamics simulation管道运输是一种既经济又环保的运输方式,不论是在城市建设中,还是在长途水、油、气的运输中发挥着不可替代的重要作用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于ADAMS的四自由度机械手运动学仿真1 引言1.1工业机械手研究现状随着机器人研究的不断深入和机器人领域的不断发展,机器人仿真系统在机器人设计和研究方面,发挥着重要的作用,它可应用于机器人的许多方面,已成为机器人学的一个重要分支。
例如:可帮助研究人员了解机器人工作空间的形态及极限;还能帮助研究人员了解机器人工作空间的形态与合理性;可用于分析检验轨迹规划和作业规划的正确性与合理性;可为离线编程技术的研究提供一种极为有效的验证手段;可以用于实时检测机器人与作业环境之间的碰撞与干涉以保证整个生产单元的安全等。
此外,仿真技术还可以帮助用户选择适合特定作业环境的机器人类型。
机械手是近年来发展起来的综合学科。
它集中了机械工程、电子工程、计算机工程、自动控制工程以及人工智能等多种学科的最新科研成果,代表了机电一体化的最高成就,是目前科技发展最活跃的领域之一。
工业机械手的性能,要求不断提高工作精度和作业速度,增加机构的自由度,提高通用性和灵活性,同时还要求降低成本,控制简单,安全可靠。
因此,工业机械手的研究处于机械手研究的前沿。
多自由度机械手已经得到了广泛的研究,但自由度较少的工业机械手,以其造价低廉、结构紧凑、刚度高、定位精度高、响应速度快、实用性强等优势,有极高的性价比,在实际工业市场得到了广泛的应用。
水平多关节工业机械手由于精度高、运动速度快,串联四自由度导致其靠后的驱动电机和传动系统都位于运动着的臂上,导致系统惯性增加,系统动力性能恶化;又由于串联机构求正解较容易,而求逆解则较困难,因此运动学与动力学计算困难,导致在设计中必须放宽各种设计参数;还因为机器较重,并进一步导致驱动部分变大,系统响应速度降低,大型驱动部分难以取得较高的精度。
1.2 工业机械手的功能及应用机械手是工业自动控制领域中经常遇到的一种控制对象。
机械手可以完成许多工作,如搬物、装配、切割、喷染等等,应用非常广泛。
在现代工业中,生产过程中的自动化已成为突出的主题。
各行各业的自动化水平越来越高,现代化加工车间,常配有机械手,以提高生产效率,完成工人难以完成的或者危险的工作。
可是在机械工业中,加工、装配等生产很大程度上不是连续的。
据资料介绍,美国生产的全部工业零件中,有75%是小批量生产;金属加工生产批量中有四分之三在50件以下,零件真正在机床上加工的时间仅占零件生产时间的5%。
从这里可以看出,装卸、搬运等工序机械化的迫切性,工业机械手就是为实现这些工序的自动化而产生的。
目前在我国机械手常用于完成的工作有:注塑工业中从模具中快速抓取制品并将制品传送到下一个生产工序,机械手加工行业中用于取料、送料,浇铸行业中用于提取高温熔液等等。
下面具体说明机械手在工业方面的应用。
(1) 建造旋转零件(转轴、盘类、环类)自动线一般都采用机械手在机床之间传递零件。
国内这类生产线很多,如沈阳永泵厂的深井泵轴承体加工自动线(环类),大连电机厂的4号和5号电动机加工自动线(轴类),上海拖拉机厂的齿坯自动线(盘类)等。
加工箱体类零件的组合机床自动线,一般采用随行夹具传送工件,也有采用机械手的,如上海动力机厂的气盖加工自动线转位机械手。
(2)在实现单机自动化方面各类半自动车床,有自动加紧、进刀、切削、退刀和松开的功能,但仍需人工上下料;装上机械手,可实现全自动化生产,一人看管多台机床。
目前,机械手在这方面应用很多,如上海柴油机厂的曲拐自动车床和座圈自动车床机械手,大连第二车床厂的自动循环液压仿行车床机械手,沈阳第三机床厂的Y38滚齿机械手,青海第二机床厂的滚铣花键机床机械手等。
由于这方面的使用已有成功的经验,国内一些机床厂已在这类产品出厂时就附上机械手,或为用户安装机械手提供条件。
如上海第二汽车配件厂的灯壳冲压生产线机械手(生产线中有两台多工位机床)和天津二注塑机有加料、合模、成型、分模等自动工作循环,装上机械手的自动装卸工件,可实现全自动化生产。
目前机械手在冲床上应用有两个方面:一是160t以上的冲床用机械手的较多,如沈阳低压开关厂200t环类冲床磁力起重器壳体下料机械手和天京拖拉机厂400t冲床的下料机械手等;二是用于多工位冲床,用作冲压件工位间步进轻局技术研究所制作的120t和40t多工位冲床机械手等。
(3)铸、锻、焊热处理等热加工方面模锻方面,国内大批量生产的3t、5t、10t模锻锤,其所配的转底炉,用两只机械手成一定角度布置在炉前,实现进出料自动化,上海柴油机厂、北京内燃机厂、洛阳拖拉机厂等已有较成熟的经验。
1.3本文研究内容及研究意义本文所介绍的方法是使用Pro/Engineer 进行3D 建模,并使用ADAMS 进行运动学和动力学仿真。
在机械手的设计过程中,使用计算机模拟计算实际机械手的运动与受力特征,指导3D 设计过程的方法,可以降低机械手的开发周期,降低了机械手的开发成本;机械手的运动学仿真,还具有进行样机试验无法比拟的其他优势,包含可以准确预测机械手的下一步的运动过程,通过更改机械手的控制算法,可以降低机械手的能耗、反应时间,而且还具有及时改进设计参数、再次进行仿真、避免重复的实物建造等一系列降低费用、缩短开发周期的优点。
2工程机械仿真简介2.1 概述建国以来,工程机械行业从无到有,从弱到强,走过了波澜壮阔的60年风雨历程,为我国的现代化建设做出了重要贡献。
工程机械行业已经成为我国工业领域在自主创新、品牌建设、出口创汇等方面的典范,涌现了一批在国内外有影响力的人物、企业、品牌。
2.2工程机械仿真的思想、内容和特点工程机械是否具有优良品质、使用性能和可靠性水平,取决于采用先进的设计理论和方法手段产生的优化的零部件及机器整体的结构形状。
工程机械仿真设计的基本思想、内容是:建立以机器的技术经济效益综合评价指标为优化准则,在相似的使用条件下,从结构尺寸相似的现有机器产品系列中筛选出技术经济指标和效益指标最优的机器作为样机,然后根据描述机器技术形态和工作过程的数学方程,运用相似理论推导出设计机器与样机参数间的相似公式,利用计算机进行计算和处理,迅速将优化样机参数换算到要设计的机器上,并根据所得新机器的主要参数和样机的结构与图形,绘制出设计机器的图纸。
仿真设计的特点主要是理论性强、速度快、费用低,是工程机械研制新机器的良好途径,它不仅对提高机器的开发速度,保证设计质量有良好的实用价值,而且对引进机器设备的仿制及系列化具有重要作用。
2.3 参数化设计概念参数化设计是一种使用重要几何参数快速构造和修改几何模型的造型方法。
采用参数化模型,通过调整参数来修改和控制几何形状,从而自动实现产品的精确造型。
这些重要的几何参数包括控制形体大小的尺寸和定位形体的方向矢量等。
参数化技术以约束为核心,是一种比约束自由造型技术更新颖、更好的造型技术。
该技术具有以下3个方面的优点:( 1 ) 设计人员的初始设计要求低。
无需精通绘图,只需勾绘草图即可,提高了设计的柔性。
( 2 ) 便于系列化设计。
同种规格零件的不同尺寸系列可在一次设计成型后通过修改尺寸得到。
( 3 ) 便于随时编辑、修改,能满足反复设计要求。
2.4 工程机械零部件参数化仿真设计工程机械各个机构由很多的零部件构成,其中存在大量的相似件,同一系列的机型之间也有大量的相似件。
在传统的二维、三维设计方法上,需要对每一个零部件进行分别建模,这就必然要求占用较多的时间和空间,浪费更多的精力,而且在对零部件进行修改时,需要改动的参数也比较多,花费大量的时间和精力,对设计者来说节省设计时间、提高设计效率成为主题。
3 Pro/E功能介绍3.1引言Pro/E是全方位的3D产品开发软件包,和相关软件Pro/DESINGER(造型设计)、Pro/MECHANICA(功能仿真),集合了零件设计、产品装配、模具开发、加工制造、钣金件设计、铸造件设计、工业设计、逆向工程、自动测量、机构分析、有限元分析、产品数据库管理等功能,从而使用户缩短了产品开发的时间并简化了开发的流程,国际上有27000多企业采用了PRO/ENGINEER软件系统,作为企业的标准软件进行产品设计。
3.2 Pro/E对三维模型的处理3.2.1 Pro/E的三维模型创建功能特征造型是几何造型技术的发展,它对诸如零件形状、尺寸、工艺、功能等相关信息的综合描述更直观和更具工程含义。
基于特征的造型系统一般先将大量的标准特征或用户自定义特征存入数据库,在设计阶段调用特征库中的特征作为基本造型单元进行建模,再逐步输入几何信息、工艺信息,建立零件的特征数据模型,并将其存入数据库。
基于特征的造型方法大大地提高了设计效率和质量,同时在设计过程中设计人员可方便地进行特征的合法性、相关性检查,便于组织复杂的特征。
特征建模过程实际上是一系列特征的累加过程。
在三维建模中主要有以下3种特征:(1)实体特征它是构建三维模型的基本单元和主要设计对象。
实体特征可以是正空间特征(如实体的突出部分),也可以是负空间特征(如实体上的孔、槽等)。
在Pro/E中,根据建模方式和原理的差异,把实体特征进一步分为基础特征和工程特征。
基础特征是三维模型设计的起点,包括拉伸特征、旋转特征、扫描特征和混合特征等;工程特征是在基础特征上的附加特征,它的创建依赖于已存在的基础特征,是有一定工程应用价值的特征,包括孔特征、肋特征、倒角特征和拔模特征等。
(2)曲面特征它是一种没有质量和体积的几何特征,对曲面的精确描述比较复杂,在目前三维造型中通常采用“B样条曲线”为基础,通过曲率分布图对曲线进行编辑,进而得到高质量的曲面造型。
曲面特征主要用于产品的概念设计、外形设计和逆向工程等设计领域。
(3)基准特征指参数化设计的基准点、基准轴、基准曲线、基准平面和坐标系等。
一般来说,基准特征主要用于辅助三维模型的创建。
3.2.2 Pro/E建模的一般过程建模的各个过程有机地结合起来,形成一个整体,整个建模过程就是基于特征为基本单位的参数化设计过程。
其中参数包括几何参数和尺寸参数。
几何参数确定了实体特征基本位置的固定关系,尺寸参数决定了产品外观尺寸和相对距离。
利用参数可以准确控制和修改所建立的三维模型。
Pro/E建模的一般过程如下:(1) 建立或选取基准特征作为模型空间定位的基准:如基准面、基准轴和基准坐标系等。
建立每个实体特征时,都要利用基准特征作为参照;(2) 建立基础实体特征:拉伸、旋转、扫描、混合等。
利用Pro/E建模首先从整体研究将要建模的零件,分析其特征组成,明确不同特征之间的关系和内在联系,确定零件特征的创建顺序,在此基础上进行建模、添加工程特征等设计。
通过二维平面草绘图的旋转、拉伸、扫描和混合等工具来实现三维实体模型的构建。
Pro/E三维模型将线框、曲面和实体三者结合起来;(3) 建立工程特征:孔、倒角、肋、拔模等;(4) 特征的修改:特征阵列、特征复制等编辑操作;(5) 添加材质和渲染处理。