同步电机矢量控制方法
永磁同步电机的矢量控制系统
永磁同步电机的矢量控制系统一、本文概述随着科技的不断进步和工业的快速发展,电机作为核心动力设备,在各种机械设备和工业自动化系统中扮演着至关重要的角色。
其中,永磁同步电机(Permanent Magnet Synchronous Motor,简称PMSM)因其高效率、高功率密度和优良的控制性能等优点,被广泛应用于电动汽车、风力发电、机床设备等领域。
为了实现永磁同步电机的精确控制,提高其运行效率和稳定性,矢量控制(Vector Control)技术被引入到永磁同步电机的控制系统中。
本文将对永磁同步电机的矢量控制系统进行深入探讨。
文章将简要介绍永磁同步电机的基本结构和运行原理,为后续的矢量控制理论奠定基础。
接着,文章将重点阐述矢量控制的基本原理和实现方法,包括坐标变换、空间矢量脉宽调制(SVPWM)等关键技术。
文章还将分析矢量控制系统中的传感器选择、参数辨识以及控制策略优化等问题,以提高系统的控制精度和鲁棒性。
通过本文的研究,读者可以对永磁同步电机的矢量控制系统有一个全面而深入的了解,为实际应用中提高永磁同步电机的控制性能提供理论支持和指导。
本文还将探讨未来永磁同步电机矢量控制系统的发展趋势和挑战,为相关领域的研究者和工程师提供有价值的参考信息。
二、永磁同步电机的基本原理永磁同步电机(Permanent Magnet Synchronous Motor, PMSM)是一种高效、高性能的电机类型,其工作原理基于电磁感应和磁场相互作用。
PMSM的核心组成部分包括定子、转子和永磁体。
定子通常由三相绕组构成,负责产生旋转磁场;转子则装有永磁体,这些永磁体在定子产生的旋转磁场作用下,产生转矩从而驱动电机旋转。
PMSM的工作原理可以简要概括为:当定子三相绕组通入三相交流电时,会在定子内部形成旋转磁场。
由于转子上的永磁体具有固定的磁极,它们在旋转磁场的作用下会受到力矩的作用,从而使转子跟随定子磁场的旋转而旋转。
通过控制定子电流的相位和幅值,可以精确控制旋转磁场的转速和转向,从而实现对PMSM的精确控制。
详解永磁同步电机矢量控制
永磁同步电机矢量控制
由于永磁同步电机(PMSM)在诸多方面的优势,在控制领域引起了极大的兴趣。
矢量控制的基本思想[4-5]是在普通的三相交流电动机上设法模拟直流电动机转矩控制的规律。
按磁场定向坐标,将电流矢量分解成产生磁通的励磁电流分量和产生转矩的转矩电流分量,并使两分量互相垂直,彼此独立,然后分别进行调节。
这样交流电动机的转矩控制。
从原理和特性上就和直流电动机相似了。
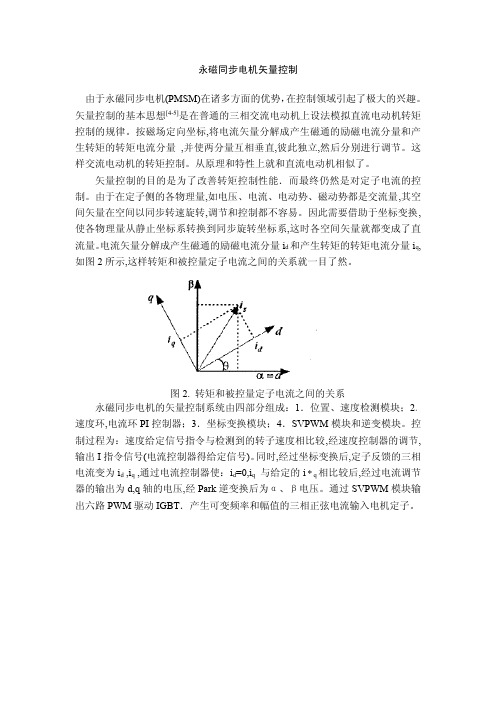
矢量控制的目的是为了改善转矩控制性能.而最终仍然是对定子电流的控制。
由于在定子侧的各物理量,如电压、电流、电动势、磁动势都是交流量,其空间矢量在空间以同步转速旋转,调节和控制都不容易。
因此需要借助于坐标变换,使各物理量从静止坐标系转换到同步旋转坐标系,这时各空间矢量就都变成了直流量。
电流矢量分解成产生磁通的励磁电流分量i d和产生转矩的转矩电流分量i q,如图2所示,这样转矩和被控量定子电流之间的关系就一目了然。
图2.转矩和被控量定子电流之间的关系
永磁同步电机的矢量控制系统由四部分组成:1.位置、速度检测模块;2.速度环,电流环PI控制器;3.坐标变换模块;4.SVPWM模块和逆变模块。
控制过程为:速度给定信号指令与检测到的转子速度相比较,经速度控制器的调节,输出I指令信号(电流控制器得给定信号)。
同时,经过坐标变换后,定子反馈的三相电流变为i d,i q,通过电流控制器使:i d=0,i q与给定的i∗q相比较后,经过电流调节器的输出为d,q轴的电压,经Park逆变换后为α、β电压。
通过SVPWM模块输出六路PWM驱动IGBT.产生可变频率和幅值的三相正弦电流输入电机定子。
永磁同步电机控制原理

iq PI
uq
r
id
id PI
ud
iq id
u
d,q
α,β u
d,q
i
i
α,β
SV PWM
驱动模块
逆变器
α,β
ia
ib
a,b,c
d / dt
控制模块
高压直流电输入输出 电机控制器外部低压输入信号 电机控制器内部输入信号 数学计算输出信号 控制程序输出信号 IGBT信号
电机控制器
PMSM
旋转变压器
永磁同步电机控制原理
控制方式
永磁同步电机 (PMSM)
矢量控制 控制方式
直接转矩控制
矢量控制(磁场定向控制)
矢量控制实现的基本原理是测量和控制电机定子电流矢量
根据磁场定向原理分别对电机的励磁电流和转矩电流进行 控制,从而达到控制电机转速和转矩的目的
对电流的空间矢量 进行坐标变换,并 进行控制,所以叫 矢量控制
数据 观测
上位机
RS232
LED 显示
外部 存储器 仿真器
DAC
键盘控制
I/O
PDPINT
SCI
CPU
PWM
产生
SPI
存储器
模块
EMIF
ADC PLL
JTAG
WD/RTI
DSP
QEP
U DC C
故障检 测电路
光
驱
三相
耦
动
逆变
隔
电
电路
离
路
IPM
电流 检测
位置 检测
PMSM
IPM内部集成: 6个IGBT 驱动电路 保护电路
驱动电机总成
软件流程图
永磁同步电机矢量控制分析

永磁同步电机矢量控制分析一、本文概述永磁同步电机(PMSM)作为一种高性能的电机类型,在现代工业、交通以及新能源等领域的应用日益广泛。
其矢量控制技术,即通过对电机电流的精确控制,实现对电机转矩和磁场的独立调节,从而实现电机的高效、稳定运行。
本文旨在全面分析永磁同步电机的矢量控制技术,包括其基本原理、控制策略、实现方法以及在实际应用中的优缺点,为相关领域的研究者和工程师提供有益的参考。
本文将对永磁同步电机的基本结构和工作原理进行简要介绍,为后续的分析奠定理论基础。
然后,将重点讨论矢量控制技术的理论基础和实现方法,包括空间矢量脉宽调制(SVPWM)技术、电流环和速度环的设计与控制策略等。
在此基础上,本文将深入分析矢量控制技术在永磁同步电机中的应用,包括其在提高电机效率、优化动态性能以及提升系统稳定性等方面的作用。
本文还将对矢量控制技术在永磁同步电机应用中的挑战和前景进行探讨。
一方面,将分析当前矢量控制技术在实际应用中面临的主要问题,如参数敏感性、控制复杂度以及成本等;另一方面,将展望未来的发展趋势,如智能化、集成化以及优化算法的应用等。
本文将对永磁同步电机矢量控制技术的未来发展提出展望,以期为该领域的进一步研究和应用提供参考。
二、永磁同步电机基本原理永磁同步电机(Permanent Magnet Synchronous Motor,PMSM)是一种高效、高功率密度的电机,广泛应用于电动汽车、风力发电、工业自动化等领域。
其基本原理主要基于电磁感应和磁场相互作用。
PMSM的核心部件是永磁体,这些永磁体通常嵌入在电机的转子中,形成固定的磁场。
当电机通电时,定子中的电流会产生一个旋转磁场。
这个旋转磁场与转子中的永磁体磁场相互作用,使得转子开始旋转。
通过精确控制定子中的电流,可以实现对转子旋转速度、方向和扭矩的精确控制。
在PMSM中,矢量控制是一种重要的控制策略。
矢量控制通过独立控制电机的磁通和扭矩分量,实现了对电机的高效、高性能控制。
永磁同步电机的控制方法

永磁同步电机的控制方法
永磁同步电机的控制方法通常有以下几种:
1. 矢量控制:通过对永磁同步电机的电流和转子位置进行精确控制,实现精准的转速和转矩控制。
控制系统中包含了速度闭环和电流闭环控制,能够实现较高的响应速度和稳定性。
2. 直接转矩控制(DTC):在矢量控制的基础上,直接对电机转矩进行控制,通过实时监测电机状态和转矩需求,调整电机相电流和振幅,从而实现转矩控制和动态响应调节,避免了传统的速度环节和PI控制器,提高了系统的动态性能。
3. 感应机同步转矩控制(ISDT):利用感应机的电流矢量和同步电机之间的转子位置误差,实现对同步电机的转矩控制。
通过对比感应机和同步电机电磁转矩的误差,并根据误差进行调节,以实现精确转矩控制。
4. 滑模控制:利用滑模控制器,通过对滑动面进行设计,将同步电机的速度和位置误差纳入控制范围,实现速度闭环控制和稳定控制。
滑模控制方法具有较强的鲁棒性和快速响应特性,适用于对永磁同步电机的高性能控制要求。
5. 直接自适应控制(Direct Adaptive Control,DAC):基于模型引导技术,根据电机特性建立适应器模型,通过实时修正控制器参数,使得控制器能够自适应地处理电机的变化和非线性特性,以实现精准控制。
永磁同步电机矢量控制

2.电压空间矢量PWM 的基本原理交流电动机输入三相正弦电流的最终目的是在电动机空间形成圆形旋转磁场,从而产生恒定的电磁转矩,将逆变器与电动机视为一个整体,以圆形磁场为目标来控制逆变器工作,这种控制方法称作“磁链跟踪控制”,磁链轨迹的控制是通过交替使用不同的电压空间矢量实现的。
与直接的SPWM 技术相比,SVPWM 算法的优点主要有:1、SVPWM 优化谐波程度高,消除谐波效果好,可以提高电压利用率。
2、SVPWM 算法提高了电机的动态响应速度,同时减小了电机的转矩脉动。
3、SVPWM 比较适合于数字化控制系统。
如图1所示,A 、B 、C 分别表示在空间静止的电动机定子三相绕组的轴线,他们在空间上互差2π⁄3,三相定子相电压u a 、u b 、u c 分别加在三相绕组上,可以定义三个定子电压空间矢量U A (t)、U B (t)、U C (t),他们在时间上互差2π⁄3,并且在各自轴线上按正弦规律变化。
U A (t )=U m cos (ωt )U B (t )=U m cos(ωt−2π/3)U C (t )=U m cos(ωt +2π/3)A(e j 0)图2.1 电压空间矢量可以得到三相电压合成矢量为:U s =U A (t )+U B (t )e i2π/3+U C (t )e −i2π/3=32U m e ωt+π/2 从上式中可以看出,电压空间矢量U s 是以角速度ω逆时针旋转的一个电压矢量,其幅值为相电压幅值的1.5倍。
又当电动机转速较高时,由定子电阻所引起的压降可以忽略不计,则定子合成电压与合成磁链空间矢量之间的关系可以写为:u s =dψsdt当电动机有三相平衡正弦电压供电时,电动机定子磁链幅值恒定,其空间矢量以恒速旋转,磁链矢量顶端的运动轨迹为圆形。
将ψs =ψs e iωt+iφ代入上式可以得到u s =ωψs e i(ωt+φ+π/2)由上式知u s 的方向与磁链矢量ψs 正交,当磁链矢量在空间旋转一周时,电压矢量也连续的按磁链圆的切线方向运动2π弧度,因此电机旋转磁场轨迹问题可以转化为电压空间矢量的运动轨迹问题。
同步电机矢量控制方法分解

本次课程结束,谢谢大家
2 矢量控制的基本原理
转速PI:转速控制环,即给 定转速与反馈的电机转速进 行PID调节输出作为电机转 矩的给定。 电流PID:电流控制环,根据给定 的转矩电流和励磁电流,以及实际 的电流反馈值进行PID控制,通过 调节输出电压达到电流控制的目的。
Ia、Ib、Ic 转速给定 转速反馈 气隙给定
变频器输出电压
转速PID 电流PID 励磁PID 逆变输出
Ua Ub Uc
M
励 磁 系 统
转速估计
变频器输出电压 Uabc、输出电流Iabc
励磁PID:励磁控制环, 即给定励磁电流通过PID 调节作为电机励磁电流的 给定
转速估计:
无速度传感器矢量控制基本原理
根据输出电压及电流值估 算电机的运行转速。
2、矢量控制的基本原理
4 、矢量控制调试说明
1)调节励磁系统励磁电流 变频器模拟量4通道(2008)输出为励磁电流控制信号(可为 0~10V或4~20mA信号)。初始励磁调节为额定励磁的30%,最终 励磁在50Hz满载稳定运行条件下,调节使Id为-0.2左右(一般 70%)。 2)设定控制参数: (1)整步时间、激励时间、激励给定默认参数,无需修改 (2)转速PID参数: KP、KI默认参数,无需改动 (3)电流PID1参数: KP、KI默认参数,无需改动 (4)励磁PID参数: KP、KI默认参数,无需改动(在空转电机 下,此参数设定为0)
4、矢量控制调试说明
3)电机转速、电机级数设置 4)电机额定电流设置 变频器额定电流:按照电机铭牌上的额定电流设置; 电机额定电流设置:采用 I(电机额定电流) = P(电机功率)/U(电机额定电压)/1.732 公式设置 给定电流:电机铭牌上额定电流的1.2倍设置; 5)VF曲线 矢量控制方式,VF参数固化,不需要设置; 其作用为对输出电压进行限制。
永磁同步电动机矢量控制

永磁同步电动机矢量控制永磁同步电动机是一种新型的高性能电机,具有高效率、高功率密度、高转矩密度等特点,在工业和交通领域有广泛应用。
矢量控制是一种高级的控制方法,可以实现电机的高精度运行和性能优化。
本文将介绍永磁同步电动机矢量控制的结构和方法。
永磁同步电动机的结构包括永磁转子、定子绕组和控制器等几个部分。
永磁转子由永磁体和转子绕组组成,永磁体产生一个恒定的磁场,而转子绕组用于传导电流。
定子绕组是通过变频器提供的三相电流激励,产生旋转磁场。
控制器则根据电机的位置、速度和负载要求等信息,调节电机的电流和控制策略,实现对电机的控制。
永磁同步电动机的矢量控制方法主要包括电流控制、转子磁链观测、速度和位置估算等几个步骤。
电流控制是通过控制器提供的电流指令,调节电机的电流大小和相位,使电机的磁场与转子磁场同步,实现最大力矩输出。
转子磁链观测则通过计算电机的电流与磁场之间的关系,实时估算转子的磁链大小和位置,用于后续的控制。
速度和位置估算则是通过测量电机的转子位置和速度,采用信号处理和滤波算法,推算出电机的实际运行状态,用于控制器的反馈。
在矢量控制中,还可以应用一些高级控制技术,如预测控制、自适应控制和模型预测控制等,以进一步提高电机的性能和动态响应。
预测控制通过模型预测电机的状态和负载要求,优化控制策略,实现最佳性能。
自适应控制则是通过实时调节控制器的参数,使控制器能够适应电机的变化,提高控制性能。
模型预测控制则是通过建立电机的动态数学模型,预测未来一段时间的状态和输出,以实现最佳的控制性能。
综上所述,永磁同步电动机矢量控制是一种高级的电机控制方法,能够实现对电机的高精度控制和性能优化。
通过控制电机的电流和磁场,在不同的工况下实现最大力矩输出和高效能运行。
未来,随着控制算法和硬件技术的不断发展,永磁同步电动机矢量控制在各个领域将有更广泛的应用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
4、矢量控制调试说明
(5)估计PID参数:KP:参数为默认参数,无需改动(对 于 有速度传感器的矢量控制,此参数不设定) 对于KI存在上限值与下限值; 主要调节方法: a) KI下限调整:在启动电机后,电机转速能够识别,但 电机不转,需要将KI下限值向下调整;如果电机转速没有识 别出来或者电机转动但在10Hz以下,转速上下波动浮动在10 转以上,需要将KI向上调整; b) KI上限值调整:在电机运行到20Hz以上时,如果电机 转速波动在2转以上,将KI值增大,直到电机转速控制在1-2 转以内为止。
矢量控制介绍
培训大纲
1、矢量控制
矢量控制实现的基本原理是通过测量和控制同步电 动机定子电流矢量,根据磁场定向原理分别对同步电动机 的励磁电流和转矩电流进行控制,从而达到控制同步电动 机转矩的目的.具体是将同步电动机的定子电流矢量分解 为产生磁场的电流分量 (励磁电流) 和产生转矩的电流分 量 (转矩电流) 分别加以控制,并同时控制两分量间的幅值 和相位,即控制定子电流矢量,所以称这种控制方式称为矢 量控制方式。矢量控制有无速度传感器矢量控制方式和 有速度传感器的矢量控制方式等。
4、矢量控制调试说明
3)电机转速、电机级数设臵 4)电机额定电流设臵 变频器额定电流:按照电机铭牌上的额定电流设臵; 电机额定电流设臵:采用 I(电机额定电流) = P(电机功率)/U(电机额定电压)/1.732 公式设臵 给定电流:电机铭牌上额定电流的1.2倍设臵; 5)VF曲线 矢量控制方式,VF参数固化,不需要设臵; 其作用为对输出电压进行限制。
Ia、Ib、Ic 转速给定 转速反馈 气隙给定
转速PID 电流PID 励磁PID 逆变输出
Ua Ub Uc
M
励 磁 系 统
编码器
转速通过编码器获得 有速度传感器矢量控制基本原理
3 矢量控制调试注意事项
注意事项1: 电缆不能接错:传感器要与 功率单元输出一一对应Fra bibliotek功率单元
U V
变压器柜
Ia:1010 Ib:1011 W Ic:1012
转速PID 电流PID 励磁PID 逆变输出
Ua Ub Uc
M
励 磁 系 统
转速估计
变频器输出电压 Uabc、输出电流Iabc
励磁PID:励磁控制环, 即给定励磁电流通过PID 调节作为电机励磁电流的 给定
转速估计:
无速度传感器矢量控制基本原理
根据输出电压及电流值估 算电机的运行转速。
2、矢量控制的基本原理
1 矢量控制
矢量控制的用途及优点 矢量控制VectorCtrol是从交流电机的端电压和电流计 算励磁电流和产生力矩部分的电流,得到与直流电机相同 的转矩特性的控制方式。由于可进行转矩控制,所以与传 统的通用变频器有很大不同。正逐步运用于高级机床、铁 钢、造纸、薄膜等生产线上。 输出转矩可控;可低速运行,动态响应快、转速精度 高;加速度特性好抗负载突变能力强的优点。
如果电缆接错,将出现变频器启动过流的故障;严重时损坏IGBT; 与控制机检测线号一致
3 矢量控制调试注意事项
注意: 电流传感器为霍尔电流传感器
功率单元
U
变压器柜
Ia:1010 V Ib:1011 W Ic:1012
电流传感器
注意: 1)电源:+\-15V,电源连接要正确 2)输出信号为电流信号 3)模拟板检测通道要加跳线帽
案例分析
1、现场案例1 启动变频器后,转速估计KI:下限值:0.01 现象:励磁系统励磁电流不稳定,变频器过压故障。 解决方法:将下限值调节为0.002。励磁电流稳定,电机转速 平稳。
2、现场案例2 变频器运行后,30Hz转速稳定,在40Hz运行时,转速出现波 动的现象,如给定800转,运行转速在790-810波动,励磁电 流不稳定,变频器过压故障;转速估计KI,上限值:0.04 解决方法:将KI上限值向上调整,例如调整为0.08。转速波 动1转以内,励磁稳定。
2 矢量控制的基本原理
转速PI:转速控制环,即给 定转速与反馈的电机转速进 行PID调节输出作为电机转 矩的给定。 电流PID:电流控制环,根据给定 的转矩电流和励磁电流,以及实际 的电流反馈值进行PID控制,通过 调节输出电压达到电流控制的目的。
Ia、Ib、Ic 转速给定 转速反馈 气隙给定
变频器输出电压
5、现场案例5 带载高频运行时,变频器输入电流小,输出电流很大,运行 不稳定,甚至失步导致过流。 解决方法:增大高频运行时的励磁电流。输出电流逐渐减小, 最终略大于输入电流,电机运行平稳。
本次课程结束,谢谢大家
3、现场案例3 变频器启动后,变频器报IGBT过流故障; 导致过流的原因:电缆接错、输出电流传感器无信号(信号 线松动、模拟板损坏等)
案例分析
4、现场案例4 电机不连负载条件下:旋转电机,电机转速无法控制,转速 波动较大; 现象:运行转速在10-30转波动,输出电流电流波动; 解决方法:励磁PID:KP;KI设定为零; 在连上负载后,将KP、KI还原
4 、矢量控制调试说明
1)调节励磁系统励磁电流 变频器模拟量4通道(2008)输出为励磁电流控制信号(可为 0~10V或4~20mA信号)。初始励磁调节为额定励磁的30%,最终 励磁在50Hz满载稳定运行条件下,调节使Id为-0.2左右(一般 70%)。 2)设定控制参数: (1)整步时间、激励时间、激励给定默认参数,无需修改 (2)转速PID参数: KP、KI默认参数,无需改动 (3)电流PID1参数: KP、KI默认参数,无需改动 (4)励磁PID参数: KP、KI默认参数,无需改动(在空转电机 下,此参数设定为0)