课程设计专家PID控制系统simulink仿真
基于PID的Simulink控制系统仿真PPT课件(MATLAB优秀课程、学习资料)

(2)采用MATLAB/Simulink中PID控制器进行模型控制,搭建相应的PID控 制仿真文件如图7-4所示。
PID控制器参数设置如图7-5所示。
PID控制参数为:k p 8 ki 0.10 kd 10
对其进行仿真输出图形如图7-6所示。 (3)考虑到PID控制器为比例、积分、微分控制器,在此搭建用户自己的PID控
运行画图程序输出图形如图712和图7-13所示。
(3)考虑被控对象为三阶传递函数:
Gs
s3
523.5 87.35s2 10.47s
采用Simulink模块与S函数的方法进行对象建模求解。
输入指令方程为一正弦函数 yd k sin2t
采用PID控制方法设计控制器,其中采用PID参数为 kp 1.5 ki 2.0 kd 0.05
variables: control u(t) and state x(3)
sizes.NumInputs = 2; % 4 input signals
sizes.DirFeedthrough = 1;% input reflected
directly in output
sizes.NumSampleTimes = 1;% single sampling
sys = [];
otherwise
%ቤተ መጻሕፍቲ ባይዱerror handling
error(['Unhandled flag =
',num2str(flag)]);
end;
function [sys,x0,str,ts] =
mdlInitializeSizes
sizes = simsizes;
% read default
课程设计专家PID控制系统simulink仿真
课程设计题目:专家PID控制系统仿真专家PID控制系统仿真摘要简单介绍了常规PID控制的优缺点和专家控制的基本原理,介绍了专家PID控制的系统结构,针对传递函数数学模型设计控制器。
基于MATLAB的simulink仿真软件进行应用实现,仿真和应用实现结果均表明,专家PID控制具有比常规PID更好的控制效果,且具有实现简单和专家规则容易获取的优点。
论文主要研究专家PID控制器的设计及应用,完成了以下工作:(1)介绍了专家PID控制和一般PID控制的原理。
(2)针对任务书给出的受控对象传递函数G(s)=523500/(s3+87.35s2+10470s) ,并且运用MATLAB实现了对两种PID控制器的设计及simulink仿真,且对两种PID控制器进行了比较。
(3)结果分析,总结。
仿真结果表明,专家PID控制采用多分段控制,其控制精度更好,且具有优越的抗扰性能。
关键词:专家PID,专家系统,MATLAB,simulink仿真Expert PID control system simulationAbstractThe advantages and disadvantages of conventional PID control and the basic principle of expert control are briefly introduced, and the structure of expert PID control system is introduced. Simulink simulation software based on MATLAB is implemented. The simulation and application results show that the expert PID control has better control effect than the conventional PID, and has the advantages of simple and easy to get.This paper mainly studies the design and application of the expert PID controller:(1) the principle of PID control and PID control is introduced in this paper.(2) the controlled object transfer function G (s) =523500/ (s3+87.35s2+10470s), and the use of MATLAB to achieve the design and Simulink simulation of two kinds of PID controller, and the comparison of two kinds of PID controller.(3) result analysis, summary.The simulation results show that the control accuracy of the expert PID control is better than that of the control.Key words:Expert PID , MA TLAB, expert system, Simulink, simulation目录摘要 (I)Abstract ..................................................................................................................................... I II 第一章引言 . (2)1.1 研究目的和意义 (2)1.2国内外研究现状和发展趋势 (3)第二章PID控制器综述 (3)2.1常规PID控制器概述 (3)2.2专家PID控制器 (4)第三章专家PID控制在MATLAB上的实现 (5)3.1简介 (5)3.2设计专家PID 控制器的实现方法 (5)3.3.专家PID控制器的S函数的M文件实现 (7)3.4专家PID控制器的simulink设计 (8)3.5专家PID控制和传统PID比较 (13)第四章结论 (14)4.1专家PID控制系统的优缺点及解决方案 (14)4.2最终陈述 (14)第一章引言近十几年,国内外对智能控制的理论研究和应用研究十分活跃,智能控制技术发展迅速,如专家控制、自适应控制、模糊控制等,现已成为工业过程控制的重要组成部分。
实验六-基于Simulink的位置式和增量式PID仿真

实验六基于Simulink的位置式和增量式PID仿真一、实验目的:1、用Matlab的仿真工具Simulink分别做出数字PID控制器的两种算法(位置式和增量式)进行仿真;2、被控对象为一阶惯性环节 D(s) = 1 / (5s+1);3、采样周期 T = 1 s;4、仿真结果:确定PID相关参数,使得系统的输出能够很快的跟随给定值的变化,给出例证,输入输出波形,程序清单及必要的分析。
二、实验学时:4三、实验原理:(1)列出算法表达式:位置式PID控制算法表达式为:(2)列出算法传递函数:(3)建立simulink模型:(4)准备工作:双击step,将sample time设置为1以符合采样周期 T = 1 s 的要求;选定仿真时间为500。
第一步是先获取开环系统的单位阶跃响应,在Simulink中,把反馈连线、微分器、积分器的输出连线都断开,并将’Kp’的值置为1,调试之后获取响应值。
再连上反馈线,再分别接上微分器、积分器,仿真,调试仿真值.2、增量式PID:(1)列出算法表达式:增量式PID控制算法表达式为:(2)列出算法传递函数:(3)建立simulink模型:(4)准备工作:双击step,将sample time设置为1以符合采样周期 T = 1 s 的要求;选定仿真时间为500。
第一步是先获取开环系统的单位阶跃响应,在Simulink中,把反馈连线、微分器、积分器的输出连线都断开,并将’Kp’的值置为1,调试之后获取响应值。
再连上反馈线,再分别接上微分器、积分器,仿真,调试仿真值。
四、实验内容:1、位置式:(1)P控制整定仿真运行完毕,双击“scope”得到下图将Kp的值置为0。
5,并连上反馈连线。
仿真运行完毕,双击“scope”得到下图效果不理想,再将Kp的值置为0。
2,并连上反馈连线。
P控制时系统的单位阶跃响应图如下:(2)PI控制整定(比例放大系数仍为Kp=0.2)经多次输入Ki的值,发现Ki=1时,系统的输出最理想,选定仿真时间,仿真运行,运行元毕后. 双击" Scope " 得到以下结果(3)PID控制整定经多次输入调试,Kd的值置为0.5时,系统能最快地趋向稳定。
基于SIMULINK的PID控制器设计与仿真
基于SIMULINK的PID控制器设计与仿真基于SIMULINK的PID控制器设计与仿真1.引言MATLAB是一个适用于科学计算和工程用的数学软件系统,历经多年的发展,已是科学与工程领域应用最广的软件工具。
该软件具有以下特点:数值计算功能强大;编程环简单;数据可视化功能强;丰富的程序工具箱;可扩展性能强等。
Simulink是MATLAB下用于建立系统框图和仿真的环境。
Simulink环境仿真的优点是:框图搭建方便、仿真参数可以随时修改、可实现完全可视化编程。
比例-积分-微分(Proporitional-Integral-Derivative,PID)是在工业过程控制中最常见、应用最广泛的一种控制策略。
PID控制是目前工程上应用最广的一种控制方法,其结构简单,且不依赖被控对象模型,控制所需的信息量也很少,因而易于工程实现,同时也可获得较好的控制效果。
2.PID控制原理当我们不能将被控对象的结构和参数完全地掌握,或者是不能得到精确的数学模型时,在这种情况下最便捷的方法便是采用PID 控制技术。
为了使控制系统满足性能指标要求,PID 控制器一般地是依据设定值与实际值的误差,利用比例(P)、积分(I)、微分(D)等基本控制规律,或者是三者进行适当地配合形成相关的复合控制规律,例如,PD、PI、PID 等。
图2-1 是典型PID 控制系统结构图。
在PID 调节器作用下,对误差信号分别进行比例、积分、微分组合控制。
调节器的输出量作为被控对象的输入控制量。
图2-1典型PID 控制系统结构图PID 控制器主要是依据给定值r (t )与实际输出值y (t )构成控制偏差,用公式表示即e (t )=r (t )-y (t ),它本身属于一种线性控制器。
通过线性组合偏差的比例(P )、积分(I )、微分(D ),将三者构成控制量,进而控制受控对象。
控制规律如下:101()()[()()]p d i de t u t K e t e t dt T T dt =++⎰ 其传递函数为:()1()(1)()p d i U s G s K T S E s T s ==++ 式中:Kp--比例系数; Ti--积分时间常数; Td--微分时间常数。
基于simulink的PID控制器设计与仿真

控制系统数字仿真与CAD (基于SIMULINK的PID控制器设计与仿真)系别:电气与信息工程学院专业:自动化基于SIMULINK 的PID 控制器设计与仿真摘要: 本文提出了利用Matlab 软件里的Simulink 模块提供的编程环境可对各类PID 控制器进行设计和仿真,并给出了基于Simulink 模块实现PID 控制器的设计方法,同时建立了基于Simulink 的控制系统仿真图。
通过仿真实验,验证了该设计方法不仅方便快捷,而且使系统具有较好的控制精度和稳定性,可使系统的性能有所提高,而且开发周期短,控制效果好。
关键词:Simulink ;PID 控制器;设计与仿真PID controller design and simulation based on simulinkAbstract: This paper proposes the use of Matlab Simulink software module in the programming environment can provide various types of PID controller design and simulation, and gives Simulink module based PID controller design method, while establishing a control system based on Simulink simulation Figure. Simulation results validate the design method is not only convenient, but also make the system has good control accuracy and stability, system performance can be improved, and the development cycle is short, good control effect.Key words: Simulink ;PID controller ;Design and simulation1 引言:MATLAB 是一个适用于科学计算和工程用的数学软件系统,历经多年的发展,已是科学与工程领域应用最广的软件工具。
控制系统的Simulink仿真
06 结论与展望
结论
控制系统Simulink仿真是一种有 效的工具,可用于模拟和分析各 种控制系统的性能。通过使用 Simulink,研究人员和工程师可 以轻松地构建和修改控制系统模 型,并使用各种仿真工具进行系 统分析和优化。
Simulink提供了广泛的模块库和 工具,可用于构建各种类型的控 制系统模型,包括线性、非线性、 离散和连续系统。这些模块可以 方便地组合和修改,以适应特定 的控制系统需求。
非线性系统仿真
总结词
对非线性系统的动态行为进行模拟的过程。
详细描述
非线性系统在Simulink中可以通过使用非线性模块进行模拟。非线性系统是指系统的 输出与输入不成比例的系统,例如某些电子设备或机械系统。在Simulink中,可以使 用非线性模块来模拟这些系统的行为,例如非线性增益、饱和等。通过调整模块参数,
• 未来,Simulink可能会引入更多先进的仿真技术和算法,以提高仿真精度和 效率。例如,基于模型的控制设计、自适应控制、预测控制等先进控制算法可 能会被集成到Simulink中,以提供更强大的分析和优化工具。
• 此外,随着物联网和智能制造等领域的快速发展,Simulink可能会扩展其模 块库和工具箱,以支持这些领域的控制系统建模和仿真。例如,增加与传感器 、执行器和其他智能设备的接口模块,以及支持实时仿真和嵌入式系统开发的 工具箱。
保障生产安全
控制系统能够及时检测和预防潜在的安全隐患, 降低事故发生的可能性。
3
节能减排
优化控制参数,降低能耗和排放,符合绿色环保 要求。
控制系统的发展历程
01
02
03
模拟控制系统
Simulink下实现PID控制器控制效果地验证(过程计算机控制课程设计)
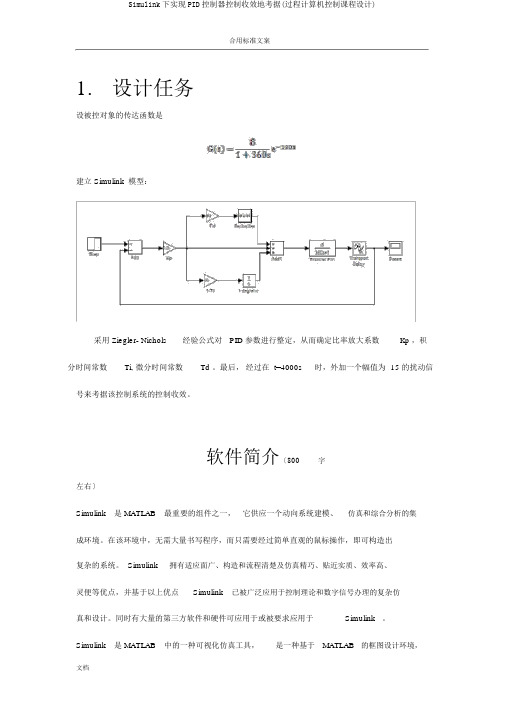
合用标准文案1.设计任务设被控对象的传达函数是建立 Simulink 模型:采用 Ziegler- Nichols经验公式对PID 参数进行整定,从而确定比率放大系数Kp ,积分时间常数Ti, 微分时间常数Td 。
最后,经过在 t=4000s时,外加一个幅值为15 的扰动信号来考据该控制系统的控制收效。
软件简介〔800字左右〕Simulink 是 MATLAB最重要的组件之一,它供应一个动向系统建模、仿真和综合分析的集成环境。
在该环境中,无需大量书写程序,而只需要经过简单直观的鼠标操作,即可构造出复杂的系统。
Simulink拥有适应面广、构造和流程清楚及仿真精巧、贴近实质、效率高、灵便等优点,并基于以上优点Simulink已被广泛应用于控制理论和数字信号办理的复杂仿真和设计。
同时有大量的第三方软件和硬件可应用于或被要求应用于Simulink。
Simulink 是 MATLAB中的一种可视化仿真工具,是一种基于MATLAB的框图设计环境,是实现动向系统建模、仿真和分析的一个软件包,被广泛应用于线性系统、非线性系统、数字控制及数字信号办理的建模和仿真中。
Simulink能够用连续采样时间、失散采样时间或两种混杂的采样时间进行建模,它也支持多速率系统,也就是系统中的不同样局部拥有不同样的采样速率。
为了创立动向系统模型,Simulink供应了一个建立模型方块图的图形用户接口(GUI),这个创立过程只需单击和拖动鼠标操作就能达成,它供应了一种更快捷、直接了然的方式,而且用户能够马上看到系统的仿真结果。
Simulink是用于动向系统和嵌入式系统的多领域仿真和基于模型的设计工具。
对各种时变系统,包括通讯、控制、信号办理、视频办理和图像办理系统,Simulink供应了交互式图形化环境和可定制模块库来对其进行设计、仿真、执行和测试。
.构架在Simulink基础之上的其他产品扩展了Simulink多领域建模功能,也供应了用于设计、执行、考据和确认任务的相应工具。
基于-Simulink的位置式和增量式PID仿真
基于Simulink的位置式和增量式PID仿真一、实验目的:1、用Matlab的仿真工具Simulink分别做出数字PID控制器的两种算法(位置式和增量式)进行仿真;2、被控对象为一阶惯性环节 D(s) = 1 / (5s+1);3、采样周期 T = 1 s;4、仿真结果:确定PID相关参数,使得系统的输出能够很快的跟随给定值的变化,给出例证,输入输出波形,程序清单及必要的分析。
二、实验学时:4三、实验原理:(1)列出算法表达式:位置式PID控制算法表达式为:(2)列出算法传递函数:(3)建立simulink模型:(4)准备工作:双击step,将sample time设置为1以符合采样周期 T = 1 s 的要求;选定仿真时间为500。
第一步是先获取开环系统的单位阶跃响应,在Simulink中,把反馈连线、微分器、积分器的输出连线都断开,并将’Kp’的值置为1,调试之后获取响应值。
再连上反馈线,再分别接上微分器、积分器,仿真,调试仿真值。
2、增量式PID:(1)列出算法表达式:增量式PID控制算法表达式为:(2)列出算法传递函数:(3)建立simulink模型:(4)准备工作:双击step,将sample time设置为1以符合采样周期 T = 1 s 的要求;选定仿真时间为500。
第一步是先获取开环系统的单位阶跃响应,在Simulink中,把反馈连线、微分器、积分器的输出连线都断开,并将’Kp’的值置为1,调试之后获取响应值。
再连上反馈线,再分别接上微分器、积分器,仿真,调试仿真值。
四、实验内容:1、位置式:(1)P控制整定仿真运行完毕,双击“scope”得到下图将Kp的值置为0.5,并连上反馈连线。
仿真运行完毕,双击“scope”得到下图效果不理想,再将Kp的值置为0.2,并连上反馈连线。
P控制时系统的单位阶跃响应图如下:(2)PI控制整定(比例放大系数仍为Kp=0.2)经多次输入Ki的值,发现Ki=1时,系统的输出最理想,选定仿真时间,仿真运行,运行元毕后. 双击" Scope " 得到以下结果(3)PID控制整定经多次输入调试,Kd的值置为0.5时,系统能最快地趋向稳定。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
内蒙古科技大学课程设计题目:专家PID控制系统仿真学生姓名:学号:专业:自动化班级:指导教师:专家PID控制系统仿真摘要简单介绍了常规PID控制的优缺点和专家控制的基本原理,介绍了专家PID控制的系统结构,针对传递函数数学模型设计控制器。
基于MATLAB的simulink仿真软件进行应用实现,仿真和应用实现结果均表明,专家PID控制具有比常规PID更好的控制效果,且具有实现简单和专家规则容易获取的优点。
论文主要研究专家PID控制器的设计及应用,完成了以下工作:(1)介绍了专家PID控制和一般PID控制的原理。
(2)针对任务书给出的受控对象传递函数G(s)=523500/(s3+87.35s2+10470s) ,并且运用MATLAB实现了对两种PID控制器的设计及simulink仿真,且对两种PID控制器进行了比较。
(3)结果分析,总结。
仿真结果表明,专家PID控制采用多分段控制,其控制精度更好,且具有优越的抗扰性能。
关键词:专家PID,专家系统,MATLAB,simulink仿真Expert PID control system simulationAbstractThe advantages and disadvantages of conventional PID control and the basic principle of expert control are briefly introduced, and the structure of expert PID control system is introduced. Simulink simulation software based on MATLAB is implemented. The simulation and application results show that the expert PID control has better control effect than the conventional PID, and has the advantages of simple and easy to get.This paper mainly studies the design and application of the expert PID controller:(1) the principle of PID control and PID control is introduced in this paper.(2) the controlled object transfer function G (s) =523500/ (s3+87.35s2+10470s), and the use of MATLAB to achieve the design and Simulink simulation of two kinds of PID controller, and the comparison of two kinds of PID controller.(3) result analysis, summary.The simulation results show that the control accuracy of the expert PID control is better than that of the control.Key words:Expert PID , MA TLAB, expert system, Simulink, simulation目录摘要 (I)Abstract (II)第一章引言 (2)1.1 研究目的和意义 (2)1.2国内外研究现状和发展趋势 (3)第二章PID控制器综述 (3)2.1常规PID控制器概述 (3)2.2专家PID控制器 (4)第三章专家PID控制在MATLAB上的实现 (5)3.1简介 (5)3.2设计专家PID 控制器的实现方法 (5)3.3.专家PID控制器的S函数的M文件实现 (7)3.4专家PID控制器的simulink设计 (8)3.5专家PID控制和传统PID比较 (13)第四章结论 (14)4.1专家PID控制系统的优缺点及解决方案 (14)4.2最终陈述 (14)第一章引言近十几年,国内外对智能控制的理论研究和应用研究十分活跃,智能控制技术发展迅速,如专家控制、自适应控制、模糊控制等,现已成为工业过程控制的重要组成部分。
智能控制与常规PID控制相结合,形成所谓智能PID控制,这种新型的控制方式已引起人们的普遍关注和极大兴趣,并已得到较为广泛的应用。
PID控制是最早发展起来的控制策略之一,由于其算法简单,鲁棒性好和可靠性高,被广泛应用于工业过程控制。
在PID控制中,一个至关重要的问题是PID参数(比例系数、积分时间、微分时间)的整定。
参数整定的优劣不仅会影响到控制质量,而目还会影响到控制系统的稳定性和鲁棒性。
实际工业生产过程往往具有非线性、时变等不确定性干扰,常规PID控制器经常出现参数整定不良、控制性能欠佳,且对运行工况的适应性较差等情况。
针对以上问题,长期以来,人们一直在寻求PID控制器的自动整定技术,以适应复杂的工况和高指标的控制要求。
专家智能自整定PID控制器是将专家控制与常规PID控制相结合而具有的自整定、自学习等功能,可以用来描述复杂系统的特性,并通过学习和自组织得到相应的控制策略。
论文以Matlab为基础,研究了两种控制算法:一般的PID和专家PID算法,通过对比研究,分别指出了两种控制器的特点及存在问题。
1.1 研究目的和意义目前,智能控制已广泛地应用于自然科学和社会科学的各个领域,如:复杂的工业过程控制、机器人与机械手的控制、航天航空控制、交通运输控制等,尤其当被控对象模型包含有不确定性、时变、非线性、时滞、藕合等难以控制因素、采用其它控制理论难以设计出合适并符合要求的系统时,都有可能应用智能控制理论获得满意的解决。
专家控制是智能控制的一个分支,是先进控制的一种。
其实质是利用专家经验来设计控制器,使控制器具有智能。
本文的目的是用两种PID算法来实现PID控制在快速系统中的仿真及应用。
1.2国内外研究现状和发展趋势目前,专家PID广泛应用于自动化仪表、工业控制、动力装置控制等各个领域。
并且随着控制理论和计算机软硬件技术的不断发展和传感器集成化程度的提高,专家智能PID控制必将是极有发展前途的研究和应用方向。
近年来,人们普遍认为:基于知识和经验的专家系统、基于模糊逻辑推理于计算的模糊控制、基于人工神经网络的神经网络控制及以上方法的交叉与融合,将是今后的研究热点。
第二章PID控制器综述2.1常规PID控制器概述在工程实际中,应用最为广泛的调节器控制规律为比例、积分、微分控制,简称PID 控制,又称PID调节。
PID控制器以其结构简单、稳定性好、工作可靠、调整方便而成为工业控制的主要技术之一。
当被控对象的结构和参数不能完全掌握,或得不到精确的数学模型时,控制理论的其它技术难以采用时,系统控制器的结构和参数必须依靠经验和现场调试来确定,这时应用PID控制技术最为方便。
即当我们不完全了解一个系统和被控对象﹐或不能通过有效的测量手段来获得系统参数时,最适合用PID控制技术。
PID 控制,实际中也有PI和PD控制。
PID控制器就是根据系统的误差,利用比例、积分、微分计算出控制量进行控制的。
2.2专家PID控制器概括的讲,智能控制就是拟人智能的控制,也就是说,所设计的控制系统不仅能自动地处理数据、信息,而且能处理知识,具有推理、判断、决策等能力,是人工智能、计算机技术与控制理论相结合的控制。
专家控制系统是智能控制的主要内容之一,建立在控制理论和人工智能技术基础之上,为工业自动化控制的系统设计提供了新的方法。
与一般的经典控制系统相比,专家控制系统的基本特性,是基于知识的结构和处理不确定性问题的能力。
尽管己有许多方法来提高经典控制系统处理不确定性问题的能力,如鲁棒控制、自适应控制等,但是它们仍然难以应用到工业过程中.这是因为传统先进控制系统采用的是纯粹的分析结构、线性和时不变约束等,而且难以被用户理解。
通过引入专家系统技术,使系统具有灵活性、可靠性和处理不确定信息的能力:可以进行预测、诊断错误、给出补救方案,并且监视其执行,以保证控制性能。
专家PID控制是在常规PID控制的基础上,根据专家及操作人员的实际经验,针对具有大滞后、时变、非线性系统而提出的控制方法。
其主要特点是分区进行不同算法的调节,它既有Bang-Bang控制(最优控制)的快速性,又有迟滞控制的稳定性和抗干扰能力。
专家整定PID控制器,把人的判断技巧与推理能力参与到控制系统设计中去。
在专家整定PID控制系统中,PID参数的整定工作由专家系统实现,控制信号仍然由PID控制器给出,专家系统只是间接地影响控制过程。
总之,专家PID控制的思想就是以误差e和误差变化率e·为约束,对不同阶段的PID参数进行智能整定,以适应对动态性能和稳态精度都较高的控制系统。
第三章专家PID控制在MATLAB上的实现3.1简介专家控制(Expert Control)的实质是基于受控对象和控制规律的各种知识,并以智能的方式利用这些知识来设计控制器。
利用专家经验来设计PID参数便构成专家PID控制。
任何一个控制系统都是由被控对象和控制器两大部分构成。
无论是经典控制理论还是现代控制理论,它们主要研究的目标就是被控对象的动态行为。
而控制器的设计通常是在被控对象数字模型已知的情况下进行的。
但是在多数情况下,建立被控对象的数字模型并不是一件容易的事情,尤其是当对象具有非线性,时变性和分布参数等特性时,数字模型的建立就更加困难。
PID控制算法由于其结构简单、物理意义明确、鲁棒性强等显著的优点,使它在工业控制中处于主导地位,尤其适用于可以建立精确数学模型的确定性控制系统。
然而实际工业生产过程往往具有非线性、时变不确定性等特点,难以建立精确的数学模型,应用常规PID控制器不能达到理想的控制效果;在实际生产现场中,由于受到参数整定方法繁杂的困扰,常规PID控制器参数往往整定不良、性能欠佳,对运行工作情况的适应性很差。
因此,常规PID控制的应用受到限制和挑战。
因此,人们对PID控制做了各种改进工作。
3.2设计专家PID 控制器的实现方法令e(k)表示离散化的当前采样时刻的误差值,e(k-1)、e(k-2)分别表示前一个和前两个采样时刻的误差值,则有:Δe(k)=e(k)-e(k-1);(3-1) Δe(k-1)=e(k-1)-e(k-2)(3-2) 专家PID控制器主要由专家判断组成,根据误差e(k)及其变化Δe(k),可设计专家PID控制器,该控制器可分为以下5种情况进行设计:(1)当|e(k)|>M1时,说明误差已经很大,控制器输出应按照最大(小)输出,以迅速调整误差,使误差绝对值以最大速度减小。