自动送料小车控制
送料小车PLC控制

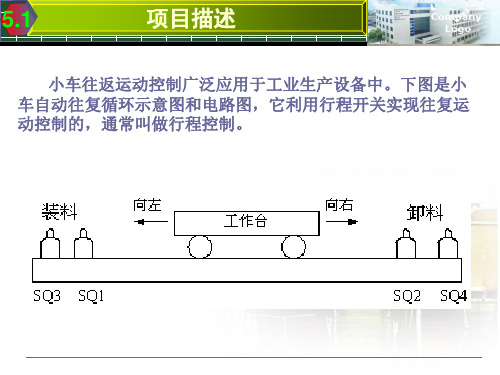
目录1设计任务与要求 (1)1.1课程设计任务 (1)1.2课程设计要求 (1)2 设计方案 (3)2.1运料小车的运动分析 (3)2.2设备控制要求 (4)2.3整体方案论证 (4)2.4系统资源分配 (5)2.4.1 I\ O地址分配 (5)2.4.2 数字量输入部分 (5)2.4.3 数字量输出部分 (6)3硬件电路设计 (7)4软件设计 (9)4.1.1 梯形图 (9)4.1.2 指令表 (12)5 调试过程 (15)5.1呼叫按钮 (15)5.2行程开关 (15)5.3比较 (15)5.4向左运动 (15)5.5向右运动 (15)5.6调试操作 (16)6 结论 (18)参考文献 (19)1设计任务与要求1.1课程设计任务任务描述某自动生产线上运料小车的运动如图所示,运料小车由一台三相异步电动机拖动电动机正转,小车右行,电机反转,小车左行。
在生产线上有5个编码为1~5的站点供小车停靠,在每一个停靠站安装一个行程开关以监测小车是否到达该站点。
对小车的控制除了启动按钮和停止按钮之外,还设有5个呼叫开关(SB1~SB5)分别与5个停靠点相对应。
1.2课程设计要求(1)按下启动按钮,系统开始工作,按下停止按钮,系统停止工作;(2)当小车当前所处停靠站的编码小于呼叫按钮SB的编码时,小车向右运行,运行到呼叫按钮SB所对应的停靠站时停止;(3)当小车当前所处停靠站的编码大于呼叫按钮SB的编码时,小车向左行,运行到呼叫按钮SB所对应的停靠站时停止;(4)当小车当前所处停靠站的编码等于呼叫按钮SB的编码时,小车保持不动;(5)呼叫按钮开关SB1~SB5应具有互锁功能,先按下者优先。
(6)设计PLC硬件电器连接图。
(7)设计PLC控制程序(梯形图或指令程序)。
2 设计方案2.1运料小车的运动分析某自动生产线上运料小车的运动如图2-1所示:图2-1运料小车示意图运料小车由一台三相异步电动机拖动,电机正转,小车向右行,电机反转,小向左行。
基于PLC的自动控制送料小车控制设计
西安航空职业技术学院毕业设计(论文)论文题目:基于PLC 的自动控制运送料小车设计所属系部:电子工程系指导老师:职称:讲师学生姓名:学号:专业:应用电子西安航空职业技术学院制西安航空职业技术学院毕业设计(论文)任务书题目:基于PLC 的自动控制运送料小车设计任务与要求:1实现送料小车的手动和自动化的转化2根据控制要求进行了小车系统的具体设计3 时间:2010年 8月 20 日至2010 年 10 月 20 日共 8 周所属系部:电子工程系学生姓名:学号:专业:应用电子指导单位或教研室:西安航空职业技术学院指导教师:职称:讲师西安航空职业技术学院制摘要可编程序控制器(Programmable controller )简称PLC ,由于PLC 的可靠性高、环境适应性强、灵活通用、使用方便、维护简单,所以PLC 的应用领域在迅速扩大。
对早期的PLC ,凡是有继电器的地方,都可采用。
而对当今的PLC 几乎可以说凡是需要控制系统存在的地方就需要PLC 。
尤其是近几年来,PLC 的成本下降,功能又不段增强,所以,目前PLC 在国内外已被广泛应用于各个行业。
本设计是为了实现送料小车的手动和自动化的转化,改变以往小车的单纯手动送料,减少了劳动力,提高了生产效率,实现了自动化生产!而且本送料小车的设计是由于工作环境恶劣,不允许人进入工作环境的情况下孕育而成的。
本文从第一章送料小车的系统方案的确定为切入点,介绍了为什么选用PLC 控制小车;第二章介绍了送料小车的应达到的控制要求;第三章STEP7-Micro/WIN32编程软件介绍及功能;第四章根据控制要求进行了小车系统的具体设计,包括端子接线图、梯形图(分段设计说明和系统总梯形图和程序指令设计;最后得出结论。
关键词:PLC ;送料小车;控制;程序设计AbstractProgrammab le logic contro ller referred to PLC ,because of the high reliability PLC adaptability,flexib ility ,enviro nment ,use convenient,simp le maintenance ,so the application of PLC in the rapidly expanding. In early PLC ,always have relays p lace ,can use. But in today's PLC to control system that almost say there is need of place of PLC. Especially in recent years, the cost of PLC , functionand not increase, so ,at the moment ,PLC at home and abroad,has been widely used in various industries.In order to achieve the design of the car feed the transformatio n of manual and automated ,simp le to change the past,car manual feed ,a reduction of the workforce , increased productivity,auto mated production! Feeding and the car is designed to be as a result of bad working conditions are not allowed to enter the working environment of the circumstances formed.This article from the first chapter of the feed system of the car identified as an entry point to introduce a car Why choose PLC control; Chapter II introduced the car feed the control requirements to be met; Chapter III under the control of the car system to carry out thespecific design ,includ ing the terminal wiring diagram ,ladder diagram (Sub-total system design descriptions and ladder and procedures for instruction design; the final conclusion.Key words: PLC; Feeding Car; Control; Program Design目录前言...................................................................... ........................................................................ .. (1)1 控制系统介绍和控制过程要求...................................................................... (2)1.1 控制系统在送料小车中的作用与地位 (2)1.2 控制系统介绍 (2)2送料小车系统方案的选择...................................................................... .. (4)2.1 可编程控制器 P LC 的优点 (4)2.2 小车送料系统方案的选择 (5)3 STEP7-Micro/WIN32编程软件介绍及功能 . ................................................................... (6)3.1 STEP7-Micro/WIN32编程软件介绍 (6)3.2、基本功能 (6)3.3、其他功能 (6)4基于PLC 的送料小车接线图及梯形图 . ................................................................... . (9)4.2 PLC端子接线图 (10)4.3 梯形图分段设计·································· (12)4.4 程序运行原理说明调试与完善 (16)4.5 系统总梯形图设计 (17)4.6 小车程序设计 . ................................................................... ........................................................................ .. (22)结论...................................................................... ........................................................................ .. (27)谢辞...................................................................... ........................................................................ .. (28)参考文献 ..................................................................... ........................................................................ . (29)基于PLC 的自动控制运料小车的设计前言随着社会迅速的发展,各机械产品层出不穷。
基于PLC的自动送料小车的控制系统设计

基于PLC的自动送料小车的控制系统设计自动送料小车是一种常见的物流设备,可以用于在仓库中实现自动化的物料搬运和送料任务。
该系统的核心是PLC(可编程逻辑控制器),通过编程控制小车的运动和各种操作。
设计一个基于PLC的自动送料小车控制系统时,需要考虑以下几个方面:1.系统结构设计:首先,需要设计系统的硬件结构,包括小车的运动系统、送料装置、传感器和PLC控制器等。
根据实际需求,选择适当的电机和传动装置,确保小车能够平稳、高效地运动。
同时,安装传感器来检测货物位置、安全障碍等信息,并将其与PLC连接起来,实现数据的传输和交互。
2.控制逻辑设计:在PLC控制器中,需要编写程序实现小车的控制逻辑。
根据实际应用场景,编写适当的算法,控制小车的启动、停止、加速、减速以及转弯等动作。
同时,根据传感器的反馈信息,判断货物的位置,确保小车能准确地将货物送到目的地。
此外,还可以添加一些安全措施,如碰撞检测、急停装置等,保障人员和设备的安全。
3.用户界面设计:为了便于操作和监控,可以设计一个人机界面(HMI),通过触摸屏或键盘等设备,与PLC进行交互。
在界面上,显示小车的状态、当前任务、货物数量等信息,同时还可以设置一些操作按钮,如启动、停止、重置等,方便用户进行操作。
4.网络通信设计:为了进一步提高系统的自动化程度,可以将PLC与上位机或其他设备进行网络通信。
通过网络通信,可以实现远程监控、数据传输、故障诊断等功能,提高系统的可靠性和效率。
最后,为了保证系统的可靠性和稳定性,需要进行充分的测试和调试。
对小车的运动、控制逻辑、传感器等进行全面测试,并进行相应的优化和调整,直到系统能够正常工作。
总之,基于PLC的自动送料小车控制系统设计,需要考虑系统结构、控制逻辑、用户界面和网络通信等方面,确保系统能够稳定、高效地运行,提高物流作业的自动化水平。
plc五工位送料小车自动控制示
目录引言 (1)1.课程设计目的 (1)1.1课程设计描述和目标 (2)1.1.1课程设计描述 (2)1.1.2.课程设计目标 (2)2.系统总体方案设计 (3)2.1 系统硬件设计 (3)2.1.1 PLC的选型 (3)2.1.2 S7-200224简介 (3)2.2 系统变量定义及分配表 (3)2.3 系统接线图设计 (4)3.控制系统程序设计 (5)3.1 控制程序流程图设计 (5)3.2五工位送料小车自动控制主电路图 (6)3.3 PLC控制梯形图设计 (7)4.系统调试及结果分析 (13)4.1 系统调试及解决的问题 (13)4.2结果分析 (13)设计总结 (14)参考文献 (15)引言自动控制系统已被广泛应用于人类社会的各个领域。
在工业方面,对于冶金、化工、机械制造等生产过程中遇到的各种物理量,包括温度、流量、压力、厚度、张力、速度、位置、频率、相位等,都有相应的控制系统。
在此基础上通过采用数字计算机还建立起了控制性能更好和自动化程度更高的数字控制系统,以及具有控制与管理双重功能的过程控制系统。
在农业方面的应用包括水位自动控制系统、农业机械的自动操作系统等。
在军事技术方面,自动控制的应用实例有各种类型的伺服系统、火力控制系统、制导与控制系统等。
在航天、航空和航海方面,除了各种形式的控制系统外,应用的领域还包括导航系统、遥控系统和各种仿真器。
此外,在办公室自动化、图书管理、交通管理乃至日常家务方面,自动控制技术也都有着实际的应用。
随着控制理论和控制技术的发展,自动控制系统的应用领域还在不断扩大,几乎涉及生物、医学、生态、经济、社会等所有领域。
运料小车是工业运料的主要设备之一。
广泛应用于自动生产线冶金、有色盒属、煤矿、港口、码头等行业,各工序之间的物品常用有轨小车来转运。
小车通常采用电动机驱动,电动机正转小车前进,电动机反转小车后退。
本文采用PLC技术,研究了运料小车的控制方法。
1.课程设计目的培养学生综合运用PLC及有关先修课程的基础知识,去解决某一实际问题的基本训练。
送料小车自动往返的电气控制
FU2 FR SB1
KM1 合上电源开关QS
KM2 SB2 SQ1 FR U V M 3~ KM2 KM1 W SQ3 SQ4 KM1 KM2 SB3 SQ2
SQ3
SQ4
KM1 SQ1 SQ2
KM2
QS L1 L2 L3
FU1
FU2 FR SB1
KM1 按下SB2, KM1线圈得电 FR U V M 3~ W
SQ3
SQ4
KM1 SQ1 SQ2
KM2
QS L1 L2 L3
FU1
FU2 FR SB1
KM1 松开SB2 电动机继 续正转 FR U V M 3~ W
KM2 SB2 SQ1 KM1 KM2 SB3 SQ2
SQ3
SQ4
KM2
SQ3 SQ4
KM1
KM1 SQ1 SQ2
KM2
QS L1 L2 L3
FU1
2.任务分析
(1)工作台怎么实现前进与后退功能? (2)工作台前进到终端后自动后退,退到原位又自动 前进,通过什么电气元件实现该功能? (3)电路中的短路、失压、过载和位置极限保护,分别 通过哪些电气器件来实现?
工作台自动往返示意图
2.任务分析 提问:能否在接触器联锁正反转控制线 路的基础上,作一些改进来实现这种自 动往返控制?
SQ3
SQ4
KM1 SQ1 SQ2
KM2
QS L1 L2 L3
FU1
FU2 FR SB1
KM1 按下SB1, 各开关复位 电机停转 FR U V M 3~ W
KM2 SB2 SQ1 KM1 KM2 SB3 SQ2
SQ3
SQ4
Байду номын сангаас
送料小车自动控制系统(“小车”文档)共3张

控制系统的主回路与电动机正反转控制主回路系统如图5-16所示。
输入输出X0 Nhomakorabea正转启动SB1
Y0 控制电动机正转接触器KM1
X1
反转启动SB2
Y1 控制电动机反转接触器KM2
X2
停止SB3
X3
右限位SQ1
X4
左限位SQ2
X5
中限位SQ3
表5-2小车控制系统I/O分配图
控制电动机正转接触器KM1 送料小车自动控制系统 图控5制-3系1统P的LC主I/回O端路子与接电线动图机正反转控制主回路系统如图5-16所示。 控制电动机正反转接触器KM12 表5-2小车控制系统I/O分配图 控表制5-2系小统车的控主制回系路统与I/电O分动配机图正反转控制主回路系统如图5-16所示。 图系5统-3的1起P动LC(I/SOB端1子、接SB线2)图、停止(SB3)需要三个按钮,起点和终点处的两个行程开关是用来自动控制小车的往复运动。
表这控系5里制统-2用 电 的小两动起车个机动控接正(制触转S系B器接1统、分触I/S别器OB分控K2M配)制1图、小停车止左(行S(BK3M)2需)要右三行个(按K图钮M1,5)-起3。1点和P终L点CI处/O的端两子个接行线程图开关是用来自动控制小车的往复运动。
只送要料对 小小车车自的动拖控动制电系动统机实现正反转控制即可。 控只制要电 对动小机车反的转拖接动触电器动机KM实2现正反转控制即可。 控图制5-3电1动P机LC正I/转O端接子触接器线KM图1 控制系统要实现送料小车在限位开关X4处装料,10S后装料结束,开始右行,碰到X3后停下来卸料,15S后左行,碰到X4后又停下来装料, 如此循环往复。 控送制料电 小动车机自正动转控接制触系器统KM1 只这要里对 用小两车个的接拖触动器电分动别机控实制现小正车反左转行控(制KM即2可)。右行(KM1)。 控制系统要实现送料小车在限位开关X4处装料,10S后装料结束,开始右行,碰到X3后停下来卸料,15S后左行,碰到X4后又停下来装料, 如此循环往复。
基于PLC的自动送料小车控制设计
STEP 7-Micro/WIN指令库,该指令库包括预先组态好的子程序和中断程序,这些子程序和中断程序都是专门为通过USS协议与驱动通讯而设计的。通过USS指令,您可以控制这个物理驱动,并读/写驱动参数。
(4)Modbus从站协议指令
STEP 7-Micro/WIN指令库包含有专门为Modbus通讯设计的预先定义的子程序和中断服务程序,使得与Modbus主站的通讯简单易行。使用Modbus从站协议指令,您可以将S7-200组态作为Modbus RTU从站,与Modbus主站通讯。
1
图1-1 送料小车
本控制系统只要是用于控制送料小车的自动送料。它既能减轻人的劳动强度又能自动准确到达人不能达到或很难到达的预定位置。如图1-1,推车机可以沿轨道上下移动,到达预定位置。推车机上是一个小型泵站,通过控制电磁阀换向,使两油缸伸出、缩回,顶出送料小车,再由各个仓位控制要料。
用PLC对送料小车实现控制,其具体要求如下:
送料小车2动作要求:送料小车负责向四个料仓送料,送料路上从左向右共有4个料仓(位置开关SQ11,SQ12,SQ13,SQ14)分别受PLC的I1.0,I1.1,I1.2,I1.3检测,当信号状态为1是,说明运料小车到达该位置。小车行走受两个信号的驱动,Q1.5驱动小车左行,Q1.4驱动小车右行。料仓要料由4个手动按钮(SB11,SB12,SB13,SB14)发出(对应于PLC为I1.4,I1.5,I1.6,I1.7)按钮发出信号其相应指示灯就亮(HL11-HL14),指示灯受PLC的Q1.0-Q1.3控制。
因此,最终我选择了用可编程控制器PLC来实现送料小车系统的控制,完成本次的设计题目。
第三章
3.1 STEP7-Micro/WIN32编程软件介绍
送料小车自动往返的PLC控制
3
输入输出接口
Company Logo
内部电路
R1
I0.0
5 .6 k S1
D1
Q1
R2
1k
D2
1M
M
DC
L+
2 4v
3
输入输出接口
Company Logo
❖ 3. 热电偶、热电阻扩展模块
❖ 4. PROFIBUS-DP通信模块
5.5 S7-200 PLC内部器件
Company Logo
31
PLC数据类型
2
编址方式
3
寻址方式
4
元件功能及地址分配
31
PLC数据类型
Company Logo
❖ 最基本的存储单位是位(bit),8位二进制数组成1个 字节(Byte),其中的第0位为最低位(LSB),第7位为 最高位(MSB)。两个字节(16位)组成1个字(Word), 两个字(32位)组成1个双字(Double word)。把位、 字节、字和双字占用的连续位数称为长度。
2
PLC基本组成
Company Logo
❖ 可编程控制器主要由CPU、存储器、基本I/O接口电路、 外设接口、编程装置、电源等组成
输入 信号
输
输
入
出
接
CPU
接
口
存储器
口
电
单元
电
路
路
编程装置
输出 设备
2
PLC基本组成
Company Logo
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
目录1设计任务与要求 (1)1.1课程设计任务 (1)1.2课程设计要求 (1)2 设计方案 (3)2.1运料小车的运动分析 (3)2.2设备控制要求 (4)2.3整体方案论证 (4)2.4系统资源分配 (5)2.4.1 I\ O地址分配 (5)2.4.2 数字量输入部分 (5)2.4.3 数字量输出部分 (6)3硬件电路设计 (7)4软件设计 (9)4.1.1 梯形图 (9)4.1.2 指令表 (12)5 调试过程 (15)5.1呼叫按钮 (15)5.2行程开关 (15)5.3比较 (15)5.4向左运动 (15)5.5向右运动 (15)5.6调试操作 (16)6 结论 (18)参考文献 (19)1设计任务与要求1.1课程设计任务任务描述某自动生产线上运料小车的运动如图所示,运料小车由一台三相异步电动机拖动电动机正转,小车右行,电机反转,小车左行。
在生产线上有5个编码为1~5的站点供小车停靠,在每一个停靠站安装一个行程开关以监测小车是否到达该站点。
对小车的控制除了启动按钮和停止按钮之外,还设有5个呼叫开关(SB1~SB5)分别与5个停靠点相对应。
1.2课程设计要求(1)按下启动按钮,系统开始工作,按下停止按钮,系统停止工作;(2)当小车当前所处停靠站的编码小于呼叫按钮SB的编码时,小车向右运行,运行到呼叫按钮SB所对应的停靠站时停止;(3)当小车当前所处停靠站的编码大于呼叫按钮SB的编码时,小车向左行,运行到呼叫按钮SB所对应的停靠站时停止;(4)当小车当前所处停靠站的编码等于呼叫按钮SB的编码时,小车保持不动;(5)呼叫按钮开关SB1~SB5应具有互锁功能,先按下者优先。
(6)设计PLC硬件电器连接图。
(7)设计PLC控制程序(梯形图或指令程序)。
2 设计方案2.1运料小车的运动分析某自动生产线上运料小车的运动如图2-1所示:图2-1运料小车示意图运料小车由一台三相异步电动机拖动,电机正转,小车向右行,电机反转,小向左行。
电动机正反转图如图2-2所示:图2-2三相异步电动机正反转主电路图在生产线上有5个编号为l ~5的站点供小车停靠,在每一个停靠站安装一个行程开关以监测小车是否到达该站点。
对小车的控制除了启动按钮和停止按钮之外,还设有5个呼叫按钮开关(SB1~SB5)分别与5个停靠站点相对应。
自动化生产1号____2号4号3号站5号站运料小车2.2设备控制要求运料小车在自动化生产线上的控制要求如下;(1)按下启动按钮,系统开始工作,按下停止按钮,系统停止工作;(2)当小车当前所处停靠站的编码小于呼叫按钮HJ的编码时,小车向右运行,运行到呼叫按钮HJ所对应的停靠站时停止;(3)当小车当前所处停靠站的编码大于呼叫按钮HJ的编码时,小车向左运行,运行到呼叫按钮HJ所对应的停靠站时停止;(4)当小车当前所处停靠站的编码等于呼叫按钮HJ的编码时,小车保持不动;(5)呼叫按钮开关HJI~HJ5应具有互锁功能,先按下者优先。
2.3整体方案论证按照设计要求,只是控制小车正转和反正,所以采用经验设计法。
控制系统图如图2-3所示:图2-3 运料小车控制系统图根据系统控制要求,分析出如下系统控制流程图:图2-4 控制系统流程图2.4系统资源分配2.4.1 I\ O地址分配由于CPU模块有14点数字量输入,10点数字量输出,所以不再需要输入\输出模块。
采用I\O自动分配方式,模块上的输入端子对应的输入地址是I0.0~I1.3,输出端子对应的输出地址是Q0.0~Q0.92.4.2 数字量输入部分这个控制系统的输入有启动按钮开关、停止按钮开关、5个呼叫按钮开关、5个行程开关共12点输入。
具体的输入分配如表2-1所示:表2-1 输入地址分配2.4.3 数字量输出部分这个控制系统需要控制的外部设备只有控制小车运动的三相电动机。
但是电机有正转和反转两种状态,分别对应正转继电器和反转继电器,所以输出点有2个。
具体的输出分配表如表2-2所示:表2-2输出地址分配3硬件电路设计系统硬件接线图如图3-1、3-2所示:图3-1 主电路图3-2系统接线图图中KM1 和KM2 分别是控制电机正转运行(小车前进)和反转运行(小车后退)的交流接触器。
用KM1 和KM2 的主触点改变进入电动机的三相电源的相序, 即可以改变电动机的旋转方向。
图中KM1 的线圈串联了KM2 的辅助常闭触点,KM2 的线圈串联了KM1的辅助常闭触点,组成了硬件互锁电路。
可以避免由于正反转(小车前进、后退)切换过程中电感的延时作用,导致原来接通的接触器的主触点还未断弧时, 另一个接触器的主触点已经合上而造成交流电源瞬间短路的故障。
通过主电路与PLC 的控制电路的接线, 才能实现PLC 对系统的控制。
实物图4软件设计4.1.1 梯形图写出送料小车的梯形图,如下图所示:4.1.2 指令表由系统总梯形图,我们写出送料小车的程序指令,如下图所示:5 调试过程5.1呼叫按钮在该程序中,5个站的呼叫按钮分别用数字1-5来表示。
当按下1号站呼叫按钮开关时,行程开关I0.2得电,数字1传送到VB0;当按下2号站呼叫按钮开关时,行程开关I0.3得电,数字2传送到VB0;依次类推,当按下5号站呼叫按钮开关时,行程开关I0.6得电,数字5传送到VB0。
5.2行程开关在该程序中,5个站的行程开关分别用数字1-5来表示。
当小车在1号站时,行程开关I0.7得电,将数字1传送到VB0;当小车在2号站时,行程开关I1.0得电,将数字2传送到VB0。
依次类推,当小车在5号站时,行程开关I1.3得电,将数字5传送到VB1。
5.3比较按下启动按钮和呼叫按钮后,开始对行程开关VB0和呼叫按钮VB1中的数据进行比较。
当VB1>VB0时,即小车当前所处停靠站的编码大于呼叫按钮的编码时,小车向左运行;当VB1=VB0时,即小车当前所处停靠站的编码等于呼叫按钮的编码时,小车不动;当VB1<VB0时,即小车当前所处停靠站的编码小于呼叫按钮的编码时,小车向右运行。
5.4向左运动小车当前所处停靠站的编码大于呼叫按钮的编码时,小车向左运行,运行到呼叫按钮所对应的停靠站时停止。
5.5向右运动小车当前所处停靠站的编码小于呼叫按钮的编码时,小车向右运行,运行呼叫按钮所对应的停靠站时停止。
5.6调试操作先按接线图接好线,打开电脑中的“PLC在运料小车控制系统中应用”的程序,在下载到S7-200中。
开始调试:按下启动按钮I0.0,假定小车初始位置在1号位置,按下行程开关I0.7。
现在开始呼叫:1号位置呼叫,按下I0.2,Q0.0和Q0.1都不亮,说明电机不转小车停止,拨回I0.2;2号位置呼叫,按下I0.3,Q0.1亮,说明电机正转小车右行,拨回I0.3;3号位置呼叫,按下I0.4,Q0.1亮,说明电机正转小车右行,拨回I0.4;4号位置呼叫,按下I0.5,Q0.1亮,说明电机正转小车右行,拨回I0.5;5号位置呼叫,按下I0.6,Q0.1亮,说明电机正转小车右行,拨回I0.6;拨回I0.7。
假定小车初始位置在2号位置,按下行程开关I1.0。
现在开始呼叫:1号位置呼叫,按下I0.2,Q0.0亮,说明电机反转小车左行,拨回I0.2;2号位置呼叫,按下I0.3,Q0.0和Q0.1都不亮,说明电机不转小车停止,拨回I0.3;3号位置呼叫,按下I0.4,Q0.1亮,说明电机正转小车右行,拨回I0.4;4号位置呼叫,按下I0.5,Q0.1亮,说明电机正转小车右行,拨回I0.5;5号位置呼叫,按下I0.6,Q0.1亮,说明电机正转小车右行,拨回I0.6;拨回I1.0。
假定小车初始位置在3号位置,按下行程开关I1.1。
现在开始呼叫:1号位置呼叫,按下I0.2,Q0.0亮,说明电机反转小车左行,拨回I0.2;2号位置呼叫,按下I0.3,Q0.0亮,说明电机反转小车左行,拨回I0.3;3号位置呼叫,按下I0.4,Q0.0和Q0.1都不亮,说明电机不转小车停止,拨回I0.4;4号位置呼叫,按下I0.5,Q0.1亮,说明电机正转小车右行,拨回I0.5;5号位置呼叫,按下I0.6,Q0.1亮,说明电机正转小车右行,拨回I0.6;拨回I1.1。
假定小车初始位置在4号位置,按下行程开关I1.2。
现在开始呼叫:1号位置呼叫,按下I0.2,Q0.0亮,说明电机反转小车左行,拨回I0.2;2号位置呼叫,按下I0.3,Q0.0亮,说明电机反转小车左行,拨回I0.3;3号位置呼叫,按下I0.4,Q0.0亮,说明电机反转小车左行,拨回I0.4;4号位置呼叫,按下I0.5,Q0.0和Q0.1都不亮,说明电机不转小车停止,拨回I0.5;5号位置呼叫,按下I0.6,Q0.1亮,说明电机正转小车右行,拨回I0.6;拨回I1.2。
假定小车初始位置在5号位置,按下行程开关I1.3。
现在开始呼叫:1号位置呼叫,按下I0.2,Q0.0亮,说明电机反转小车左行,拨回I0.2;2号位置呼叫,按下I0.3,Q0.0亮,说明电机反转小车左行,拨回I0.3;3号位置呼叫,按下I0.4,Q0.0亮,说明电机反转小车左行,拨回I0.4;4号位置呼叫,按下I0.5,Q0.0亮,说明电机反转小车左行,拨回I0.5;5号位置呼叫,按下I0.6,Q0.0和Q0.1都不亮,说明电机不转小车停止,拨回I0.6;拨回I1.2。
按下停止按钮I0.1,拨回I0.1,I0.0,调试结束。
备注:由于实验箱按钮只有I0.0~I0.7,实验中I1.0~I1.3都用接线到I0.0的方式来代替的。
6 结论在做这个设计中,我学会了很多以前没学过的知识,也巩固了很多以前没学好的知识,使我的专业理论知识更加扎实,软件操作更加熟练了。
做完这个设计后,我得出几个结论如下:1、送料小车在硬件设计中,加入了扩展模块,可以在触点不够的情况下方便地实现该小车的系统控制;然后软件设计中,运用了上微分指令,简化了程序,还运用了互锁,确保了系统的正常运行,减少了系统的故障点。
在送料小车的系统中加入了手动操作程序,便于设备的维修,方便操作人员操作。
2、该小车系统在实施的情况下,其成本价格比较高。
3、该小车控制系统的研究方向:由于本小车系统并不完善,只做了送料,没有设计小车怎么装料和小车到料仓后送料的多少。
这两方面是该系统设计的完善,是将来的研究方向。
最后,经过这次课程设计培养了我们的设计能力以及全面的考虑问题能力。
学习的过程是痛苦的但是收获成功的喜悦更是让人激动的。
相信通过这次课程设计它对我以后的学习及工作都会产生积极的影响。
参考文献[1]廖常初.可编程序控制器的编程方法与工程应用[M].重庆:重庆大学出版社[2]万太福.可编程序控制器及其应用[M]. 重庆:重庆大学出版社[3]刘祖润.毕业设计指导.北京:机械工业出版社[4]谢桂林.电力拖动与控制. 北京:中国矿业大学出版社[5]工厂常用电气设备手册编写组.工厂常用电气设备手册.北京:水利电力出版社。