西门子标准变频器在提升中的应用
西门子S120变频器在转炉中的应用
西门子S120变频器在转炉中的应用桂立波① 徐慧明(广东省阳春新钢铁有限责公司炼钢厂 广东阳春529600)摘 要 采用西门子新一代变频器S120为核心来升级转炉倾动主从控制系统,通过组建新的控制方式来提高转炉控制的精度和平稳性。
系统中采用一台西门子CU320-2控制单元控制4台西门子功率单元,控制单元与功率单元通过CLIQ连接,功率单元与plc通过profibus dp连接。
实现通过一台西门子CU320-2控制单元控制4台西门子功率单元的主从控制方式实现多轴控制,极大的提高了机械传动的同步性,消除了同步差异性引起的变频报故带来的生产风险因子。
通过我们公司的实践表明采用一台控制单元实现多轴同步控制与老一代一对一通控制方式比对,无论是从控制方式、结构设计都优于前者。
关键词 变频器 转炉 倾动系统 主从控制中图法分类号 TF3 文献标识码 BDoi:10 3969/j issn 1001-1269 2023 06 027ApplicationofSiemensS120FrequencyConverterinConverteGuiLibo XuHuiming(SteelmakingPlant,GuangdongYangchunNewSteelCo.,Ltd.,Yangchun529600)ABSTRACT ThenewgenerationofSiemensinverterS120isadoptedtoupgradetheconvertertiltingmaster slavecontrolsystem,andtheprecisionandstabilityofconvertercontrolareimprovedbyestablishinganewcontrolmode.Inthesystem,aSiemensCU320 2controlunitisusedtocontrol4Siemenspowerunits.ThecontrolunitandpowerunitareconnectedthroughCLIQ,andthepowerunitandplcareconnectedthroughprofibus dp.Themulti axiscontrolisrealizedthroughthemaster slavecontrolmodeofcontrollingfourSiemenspowerunitsbyoneSiemensCU320 2controlunit,whichgreatlyimprovesthesynchronizationofmechanicaltransmissionandeliminatestheproductionriskfactorscausedbyfrequencyconversionalarmcausedbysynchronizationdifference.Thepracticeofourcompanyshowsthatthemulti axissynchronouscontrolusingonecontrolunitissuperiortotheoldgenerationone to onecontrolmode,bothintermsofcontrolmodeandstructuredesign,anditisworthpopularizingandadopting.KEYWORDS Frequencyconverter Converter Tiltingsystem Master slavecontrol1 前言西门子官方公布西门子6SE70系列变频器于2011年10月宣布全部停产,新一代的西门子S120变频器作为迭代产品已成为电气传动领域的主力军。
《2024年西门子MM440变频器微调PID的应用》范文

《西门子MM440变频器微调PID的应用》篇一一、引言随着工业自动化技术的不断发展,变频器作为现代工业控制系统中的关键设备,在电机调速和控制系统中发挥着越来越重要的作用。
西门子MM440变频器作为其中的佼佼者,具有高效率、高可靠性及出色的控制性能。
为了满足工业控制中对高精度调速的要求,微调PID(比例-积分-微分)控制策略被广泛应用于MM440变频器中。
本文将探讨西门子MM440变频器微调PID的应用,以及其在实际工业环境中的重要性。
二、MM440变频器简介西门子MM440变频器是一款高性能的交流电机驱动器,通过改变电机的电源频率和电压来实现电机转速的控制。
该变频器具备丰富的功能,如参数设定、运行监控和保护等,可以满足不同工业应用的需求。
此外,MM440变频器支持多种控制策略,其中微调PID控制是一种重要的控制方法。
三、微调PID控制原理微调PID控制是一种闭环控制系统,它根据偏差值(期望值与实际值之差)进行比例、积分和微分运算,得到控制量以调整执行机构的动作,从而实现对被控对象的精确控制。
在MM440变频器中,微调PID控制主要用于电机的速度和位置控制。
四、MM440变频器微调PID的应用1. 速度控制:在工业生产中,电机的速度控制至关重要。
通过微调PID控制策略,MM440变频器可以根据实际需求调整电机的转速,使其达到期望的转速值。
这种控制方式具有响应速度快、精度高的特点,可以满足各种复杂工艺的要求。
2. 位置控制:在某些自动化设备中,需要精确控制电机的位置。
通过微调PID控制,MM440变频器可以根据预设的位置值调整电机的运动轨迹,实现精确的位置控制。
这在实际应用中具有重要的意义,特别是在高精度的机床和机器人等领域。
3. 优化系统性能:通过微调PID参数,可以优化MM440变频器的性能,提高系统的稳定性和可靠性。
这不仅可以延长设备的使用寿命,还可以减少维护成本和停机时间,提高生产效率。
五、实际应用案例以某生产线上的输送机为例,采用MM440变频器配合微调PID控制策略后,输送机的速度和位置控制更加精确。
提升机在干熄焦上的应用
器 ,保证系统在优化形式下运行 。
三 、干熄焦装 置专用提 升机的前 景
随着节能和环保基本国策的推进,依靠科技进步, 降低 能源消耗,已成为新世纪推动我国工业持续发展的
运行 及发展 前 景。 关键 词 : 干熄 焦 ; 升机 ; 提 制动 器 ; L P C程 序 ; 变频 器 ;限位 开 关 ;防脱钩 .
中图分类号 : Q50 T 2
文献标识码 : A
文章编号 : 09 27 2 1 ) 0 07 ~ 2 10— 34( 0 1 3 — 06 0
持原速度不变连续运行 。
走行 电机 :8 ×1 .k 台 8 5W 四台电机 可长时 间以高速2 m m n 低速 保持原 5/i, 速度不变连续运行
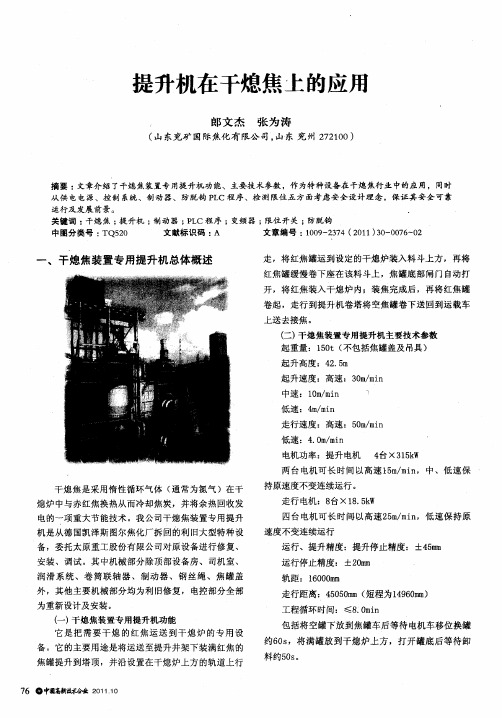
熄炉 中与赤红焦换热从而冷却焦炭 ,并将余热 回收发
电的一项重大节能技术 。我公司干 熄焦装 置专用提升
机是从德 国凯泽斯 图尔焦化厂拆 回的利 旧大型特种设 备 ,委托太原重工股份有限公司对 原设备进行修 复、
版 社 .0 0 2 1. ・
随时紧急停车,保证提升机本体及人员安全 。
( ) 动 器 方面 三 制
为防止提 升机 构出现 溜钩 ,制动器选 用液 压盘式
制动 器 ,包括 工作 制动器 和 安全制 动器 两套 系统 。
提升机每次需要动作时,安全制动器 首先 开闸,开闸
到位后提升 电机出力达到一定的扭矩后 工作制动器开
可靠 安全 。
( P C程 序 方 面 四) L
[ 西伯瑞盘式制动器安装、 5 ] 维护、 调试说明书.
西门子变频器在天钢麦尔兹窑单斗提升机上的应用
在 电动机 由停 止转为运行时 , 电磁抱 闸与电动 机 同时得 电。 电动机来说 , 对 在刚通 电瞬间 , 电磁抱闸尚 未松开 , 电动机 已产生转矩 , 但 这会造 成 电动机堵 转 进而电流大 幅提升 , 影响 电动机寿命 。 对抱闸来说 , 在 松开过程 中 , 由于 电动机 已具 有转矩 , 必将使 闸瓦 与 联轴器 产生摩 擦 , 影响 闸瓦寿命 。相应地在 电机 由运 行转为停 止时 ,也会增 大 电动 机 电流和影 响抱 闸寿
是“ ” , 一 值 但功率是正的 , 说其工作点在第三象限。
23 第 四象限 .. 4 电动机 在反向制动状 态 , 即提升机
频器先运 行至“ 升降起始频率” 然后打开抱 闸。随后 ,
将 以 5 z 0H 速度 开始上行 ; 上行至减速位 置时运行速 度 减为 l H ; 0 z提升机运行至窑顶停止位 时 , 接近开关
31 变频 器的主要参数设定 .
见表 1 。
2 . 变频调速系统 中的防溜车措施 .2 4
变频器 防止 溜车 的基 本指导 思想是 :让 上述 过 “
程在很低 的频 率下进行 , 从而使 电动机 的电流和闸瓦
表 1 变频 器主要参数表 参数设 置
P 5 =1 7 6 0 1 P 5 =1 2 6 2 0 P 5 =1 4 6 3 0 P5 O 8 8 =1
PLC在矿井提升机变频调速中的应用毕业论文(含开题报告和中期答辩)
本科毕业设计(论文)PLC在矿井提升机变频调速中的应用2011年6月本科毕业设计(论文)PLC在矿井提升机变频调速中的应用摘要摘要矿井提升机是矿山最重要的设备,肩负着矿石、物料、人员等的运输责任。
传统的矿井提升机控制系统主要采用继电器-接触器进行控制,这类提升机通常在电动机转子回路中串接附加电阻进行启动和调速。
这种控制系统存在可靠性差、操作复杂、故障率高、电能浪费大、效率低等缺点。
针对这种情况采用PLC与变频器相结合的控制方案对原有电控系统进行改造,提高整个电控系统安全可靠性、控制精度及调速性能。
因此,对矿井提升机控制系统进行研究具有现实意义,也是国内外相关行业专家学者的一个热门研究课题。
本文把可编程序控制器和变频器应用于提升机控制系统上,并在可行性方面进行了较深入的研究。
事实表明,采用该控制系统,使提升机工作可靠,使用方便,同时具有动态显示的功能,节能效果明显。
关键词:矿井提升机;变频调速;矢量控制;PLC;AbstractThe shaft hoist is the foremost equipment of mines,it is widely used to transport the materials,staff and equipment. The traditional shaft hoist control system is always controlled by the relay-contactor,and adopts the methods of connect series additional resistant in rotors winding loop to start and adjust speed. The system has many disadvantages such as bad reliability,complicated operation,high fault rate,large energy –wasting and low efficiency.According to this kind of condition, we adopt PLC and Transducer to reform for original control system, so as to raise the safety, reliability, speed regulation performance of the whole electric controlled system. So, carrying on the research on the shaft hoist control system has realistic meanings,and it is a subject for research by relevant experts and scholars,both at home and abroad.To these questions existing in the shaft hoist contro1 system,the paper applied PLC(Programmable Logic Controller)and frequency converter to the system, and carried on deeper research in feasibility. The fact indicates,adopting control system,the shaft hoist works reliably,easy to use,energy-saving well,and have dynamical shown function.Keywords:Shaft hoist;Frequency conversion;Vector control;PLC目录摘要 (I)Abstract ................................................................................................................ I I 第1章绪论.. (1)1.1课题概述 (1)1.2课题来源 (1)1.3国内外提升机研究状况 (2)1.4本文内容及研究意义 (5)1.4.1研究内容 (5)1.4.2研究意义 (6)第2章提升机的工况分析 (9)2.1提升系统简介 (9)2.2提升机电动机运行方式 (9)2.3提升机的速度图和力图 (10)2.3.1提升机的速度图 (10)2.3.2力图 (11)2.4矿井提升机对电气控制系统的要求 (12)本章小结 (15)第3章可编程控制器简介 (17)3.1PLC的基本特点 (17)3.2PLC的基本结构 (19)3.3PLC的工作原理 (20)3.4PLC的分类 (21)3.5PLC编程 (23)3.5.1PLC执行用户程序的过程 (23)3.5.2梯形图的表示 (24)3.5.3梯形图的编程规则 (25)本章小结 (25)第4章:矢量控制变频调速 (27)4.1变频调速的发展及在提升机系统中的应用 (27)4.2变频调速基本原理 (29)4.3变频调速控制方式分类 (32)4.4变频器按中间直流环节方式分类 (33)4.5变频调速技术的发展现状 (34)本章小结 (35)第5章总体设计方案 (37)5.1系统控制要求 (37)5.2选择机型 (37)5.3控制系统的I/0点 (38)5.4系统控制结构 (38)5.4.1系统主电路图 (38)5.4.2系统控制电路图 (39)5.4.3系统外围接线图 (39)5.5设计步骤 (39)5.6系统流程框图 (40)5.7硬件部分设计 (41)5.7.1输出规格 (41)5.7.2标度变换 (41)5.7.3变频器参数设置表 (41)5.8软件部分设计 (42)5.9实验及结果 (43)5.9.1实验过程 (43)5.9.2实验现象 (43)5.9.3实验结果 (44)本章小结 (44)结论 (45)参考文献 (47)致谢 (49)附录 (51)第1章绪论第1章绪论1.1 课题概述矿井提升机是机、电、液一体化的大型机械[1],广泛用于煤炭、有色金属、黑色金属、非金属、化工等矿山的竖井、斜井,是生产运输的主要工具。
现在西门子加大了对SINAMICS S120系列变频器的推广力度
现在西门子加大了对SINAMICS S120系列变频器的推广力度,S120在市场上的占有率也是节节攀升。
现在顺便也为即将使用SINAMICS S120系列变频器的朋友们简单介绍一下SINAMIC S120系列变频器。
1。
系出名门SINAMICS S120是新一代伺服驱动器,从功能上讲,已经超越了传统变频器的功能范畴。
S120不仅仅能够实现闭环矢量控制,还可以实现简单定位功能。
这是西门子在继SIMOVERT MasterDrives 6SE70以后,推出的一款力作!SINAMICS S120继承和发展了西门子变频器一贯的功能强大的特点,还在很多细节上有所创新。
(1)功率范围大。
几KW到上MW覆盖低压变频器的全功率段。
(2)结构模块化。
根据功能不同,将控制单元CU、整流器(即进线模块)、逆变器(即电机模块)等做成独立模块,可以自由搭配使用。
(3)通讯功能强大。
新推出的CU320-2集成了Profibus DP通讯接口、ProfiNET、RS232等接口,另外,可以通过选件,应用于CAN总线等。
(4)与上位伺服控制器的无缝连接。
通过多种报文,可以方便地与SIMOTION、CPU315T等运动控制器进行连接,实现高精度定位。
(5)内部资源丰富。
除了传统变频器的JOG、Fixed Setpoint、MOP、自由功能块等,还可以扩展出回零、程序步、MDI等定位操作。
同时,集成的DCC功能,可以无限扩展变频器的逻辑运算功能,在一定程序上可以实现PLC的功能。
(6)调试简单,功能强大。
使用Starter作为调试软件,图形化界面。
创新性地使用BODE图用于控制系统性能分析与优化。
不管是西门子电机,还是第三方电机,都可以达到最佳控制效果。
(7)创新性的连接Drive-CLiQ。
使用Drive-CLiQ可以自动识别设备并完成组态,节约调试时间。
2。
模块化结构(1)控制单元CU。
使用24V供电的控制器。
CU320最常用的多轴控制器。
PLC、变频技术在煤矿副井提升机上的应用
压 及 各 种 故 障 与 运 行 状 态 进 行 显示 , 还 应 具 有 故 障记 忆 功 能
及提升机速度 、电流 趋势图显示功能。测速 装置采用两套轴
编 码 器 ,之 间相 互监 控 。
动力矩小 ,机械特性 比较软 ,带负载能力差 ,无法实现恒转 矩提升 。
( 1 )电机转子 回路采用 交流接触器切换串接 电阻进行调
在正常情况下 ,提升机可 以实现变频节能运行 。当变频器 出 现故障停机时, 可以通过系统切换柜和智能操作台切换开关配 合操作,实现提升机的工频运行,对变频柜进行检修等工作 。 2 . 1智能操作台的构成
智能操 作台的构成包括 P L C控制系统 、 显示系统 。P L C 控制 系统选 用西 门子 S 7 — 2 0 0系列双 P L C控制 ,控制核心应 包含两套 P L C系统和两套测速装置 。其中一套 P L C系统及测 速装置用来完成提升机的主控功能, 另一套用来完成提升机的 监控功能。两套 P L C系统通过实时数据交换 ,完成相互监控 。 两套 P L C 的开关量输入端 口不少于 3 8个 ( 含 1 0 %的备用点
数) 。开关量输出端 口应根据矿用操作 台显示方式 的不同分别
加 以规定 ,但 不应少于 2 0个 。模拟量输入通道数不少于 5路 ( 含1 路备用) , 模拟量输 出通道数不少于 5路 ( 含1 路备用 ) 。
留有通讯和上位机接 口。具有 L I P S不间断 电源为控制回路供
( 4 )原系统保护较为单调 ,运行 时完全依 靠操 作司机手 上 的工作 闸控 制工作 闸电流进行控制提 升速 度 , 这就要求司 机高度集 中注意力 。然而 ,操作 司机 因劳动强度大而容易疲 劳 ,稍有 不慎则可能 出现安全事 故。
西门子变频器在辊道提升控制中的应用
摘要:本文介绍了提升辊道中主从控制通过西门子变频器的实现,简要介绍了主从控制的工作原理和实现方案,以及如何通过DriveMonitor来实现电机的参数调试和控制性能的优化。
关键词:主从控制、模拟量输入输出、调试
Keyword:The Master- Slave Control、AI/AO、debug
2、主从参数设置,P587=0为主动装置,P587=1为从动装置。
3、通过PLC给出速度运转电机,记录波形,根据波形调整PID速度调节控制,主要调节斜坡信号发生器的相关参数。如果PLC通讯还没有连接好,可以通过DriveMonitor主操作界面给出速度运转电机,这需要两台计算机操作,主传动和从传动装置同时合闸,但是从传动不给速度,由主传动装置发出速度,主操作界面如下图所示:
提升辊道采用西门子逆变器控制,共用直流母线。两侧电机选择功率型号完全一样的电机,相应的逆变器也完全一样,这样便于同步控制,根据齿轮减速比的不同,前后提升选择了不同容量的电机和逆变器。
二、主从控制的实现
主从控制的关键技术问题是如何把主传动的速度信号或转矩信号高速和精确地传送到从传动变频器,提升辊道选用的西门子的SIMOVERT MASTERDRIVERS系列6SE70变频器,实现方法是通过模拟量输入输出(AI/AO)连接实现主从控制。
6SE70变频器的CUVC控制板上集成有可编程的两个回路的AI(模拟量输入口)和两个回路的AO(模拟量输出口),在主从应用中主传动的速度或转矩信号可以通过AO口转换成标准的4~20mA信号输出,而从传动则是通过AI口接收主传动发来的速度或转矩给定值,这样就可以实现经济实用的主从控制应用,其接线原理图。
五、小结
提升棍道控制中应用的西门子6SE70实现的主从控制具有如下特点:
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
西门子标准变频器在提升中的应用
目前,变频器在提升的应用越来越广泛,如起重、提升、电梯等行业。
在提升中应用变频器主要有以下特点:
¾负载在下降过程中,电机会处于发电状态,即变频器处于能量回馈状态,为了防止变频器产生过电压现象而跳闸,需要制动单元与制动电阻来消耗回馈能量。
¾在提升系统中有配重(couterweight)的情况下,下降的过程有可能是电动状态,因此电机可能会工作在四象限。
¾当负载在机械抱闸打开的情况下暂停,电机需要输出很高的转矩阻止负载降落。
¾某些场合需要变频器的精确定位功能,当然定位功能也可能在上位机中实现,如电梯应用。
¾大部分的提升装置要充分考虑其安全可靠性。
¾系统的加减速需要仔细控制。
图1 变频器在提升中应用示意图
针对提升的应用特点,标准变频器应该满足以下特性
•最好安装编码器,以保证系统速度精度与安全性。
MicroMaster440所实用的编码器有TTL与HTL类型。
•加装制动单元与制动电阻,通过P1240禁止变频器的直流电压控制器功能,同时要在P1237里设置制动占空比。
•要确保电机参数的准确,这一点对于矢量控制尤其重要。
•要利用功能块来搭建超速或者负载降落保护。
•投入电机外部抱闸控制,参数为P1215-P1217。
•对于有配重的负载,矢量控制(SLVC或VC)建议用加速度予控(P1496与P0342),对于无配重负载,建议用附加转矩(P1511)来增加启动转矩。
调试
带编码器的矢量控制
借助于编码器模板(6SE6400-0EN00-0AA0)及编码器完成。
优点:
1.可实现零速满转矩运行
2.低速时性能好,确保精确定位
3.真实的反馈速度以防止电机超速与负载突降
4.容易调试
缺点:成本高
调试步骤:
1.快速调试,确保电机数据与电机名牌一致。
2.通过参数P1910=1,3做电机识别。
3.检查编码器接线以及相关参数及DIP设定(P0400,P0408等),用V/F方式来判断编码器
反馈的方向是否同设定值一致(P0061与P0021)。
4.将直流电压控制器关闭(P1240=0),并将制动单元投入(P1237=4推荐50%)。
5.投入电机报闸制动(P1215=1),并根据实际情况优化制动释放延迟时间(P1216)及最小频
率(P1080)。
6.对于无配重的负载,我们需要在提升时给定正的速度值,在下降时给定负的频率值。
7.设置控制方式P1300=21,用P1960来优化速度环(注意优化时电机会转动),同时也
可以手动修改比例增益P1460与积分时间P1462,以改善系统的动态特性。
8.转矩限幅P1520 与P1521通常被放到最大。
9.用功能块来搭建超速保护以及编码器实际反馈与速度设定背离过大保护
设置如下:
P2155[0]=FMAX+10% (55Hz ). 如果当前电机实际频率超过55Hz, 变频器的状态位53.4发生变化。
速度偏差 (设定速度) – (实际编码器返回速度) : >7%
P2800=1 激活功能块
P2801[3]=2 – 激活“或”功能块 OR1
P2801[9]=1 -激活“非”功能块 NOT1
P2802[6]=3 -激活“加法”功能块SUB1
P2802[12]=2 -激活“比较“功能块 CMP1
P2816[0]=53.4 – 把超速信号连接到 OR1
P2816[1]=2886 – 连接速度偏差过大信号到 OR1
P2828=2817 – 将“或”的结果取反 (使它可以作为外部故障信号)
P2873[0]=63 – 电机模型的输出频率
P2873[1]=61 用电机模型的输出频率减去编码器实际频率
P2885[0]=2874 比较
P2885[1]=2889
P2889=7%
P2106[0]=2829 – 当任何一个条件满足时,触发变频器跳闸
无传感器矢量控制
优点:
1.高速时变频器定位精度相对准确。
2.准确的电机模型为超速保护与负载降落保护提供了基础。
3.不需要附加备件,成本低。
缺点:
1.要求仔细调试。
2.在低频时,电机模型计算不准确,因此矢量控制所能达到最小频率比带编码器要高。
3.因为没有实际编码器去测量转子速度,因此超速保护来自观测器模型。
调试步骤:
1.快速调试,确保电机数据与电机名牌一致。
2.通过参数P1910=1,3做电机识别。
3.通过检查参数r1787 < +/- 10%,来确保电机模型的正确性。
4.将直流电压控制器关闭(P1240=0),并将制动单元投入(P1237=4推荐50%)。
5.投入电机报闸制动(P1215=1),并根据实际情况优化制动释放延迟时间(P1216)及最小频
率(P1080)。
6.对于无配重的负载,我们需要在提升时给定正的速度值,在下降时给定负的频率值。
7.设置控制方式P1300=20,用P1960来优化速度环(注意优化时电机会转动),同时也
可以手动修改比例增益P1470与积分时间P1472,以改善系统的动态特性。
8.转矩限幅P1520 与P1521通常被放到最大。
9.通常情况下,我们推荐设置P1750.0=0,当变频器频率大于P1755时,采用SLVC控制
方式。
10.我们建议将P1755设置最小,但是,这会受到低频时有效电机模型限制,通常P1755
的最小值受电机功率的影响。
经验上我们可以将P1755设定为电机滑差的1到2倍。
例如,电机50Hz的额定转速为1450转,滑差为1500-1450=50转,折合频率为1.67Hz,因此我们设定P1755的范围是1.7~3.4Hz。
11.为了保证定位精度,变频器最小的运行频率应该大于P1755。
12.如果变频器在P1755以下运行时,我们可以尝试用P1610与P1611产生更多的转矩。
13.在有配重的情况下,我们设置加速度予控P1496=100%,优化P0342,用来在启动负载
的瞬间给系统一个转矩提升。
14.在没有配重的情况下,我们可以借助附加转矩P1511来提高启动转矩或阻止电机被反
拖,我们可以设置P1511=2890,然后在P2890里设定一个经验值,这里要充分考虑空负荷与满负荷的情况。
15.对于无传感器的矢量控制,要仔细测量设备的启动停止特性,通常要往复试验以及严格
地考察电机在不同温度下电机模型的准确性。
16.用功能块来搭建超速保护以及编码器实际反馈与速度设定背离过大保护
设置如下:
P2155[0]=FMAX+10% (55Hz ). 如果当前电机实际频率超过55Hz, 变频器的状态位53.4发生变化。
速度偏差 (设定速度) – (实际编码器返回速度) : >7%
P2800=1 激活功能块
P2801[3]=2 – 激活“或”功能块 OR1
P2801[9]=1 -激活“非”功能块 NOT1
P2802[6]=3 -激活“加法”功能块SUB1
P2802[12]=2 -激活“比较“功能块 CMP1
P2816[0]=53.4 – 把超速信号连接到 OR1
P2816[1]=2886 – 连接速度偏差过大信号到 OR1
P2828=2817 – 将“或”的结果取反 (使它可以作为外部故障信号)
P2873[0]=1170 – 斜坡函数发生器后的设定频率
P2873[1]=63 —电机模型的输出频率
P2885[0]=2874 比较
P2885[1]=2889
P2889=7%
P2106[0]=2829 – 当任何一个条件满足时,触发变频器跳闸。
无论如何,MM440在起重与提升的应用还要经过实践来检验,有时设备的二次启动,有时会造成系统溜车,这时就要不断调整附加转矩或启动转矩等参数的设定值。
有时对于电机的外部抱闸与启动的配合不好,我们还需要去调解外部抱闸释放的延迟时间。
另外,我们还应该注意,变频器版本对功能的影响,例如从版本V2.10 以后,我们在外部抱闸控制上作了一些逻辑上的改变。
V2.09 V2.10。