人形机器人翻译
工业机器人外文翻译
附录外文文献原文Industrial RobotsDefinition“A robot is a reprogrammable,multifunctional machine designed to manipulate materials,parts,tools,or specialized devices,through variable programmed motions for the performance of a variety of tasks.”--Robotics Industries Association “A robot is an automatic device that performs functions normally ascribrd to humans or a machine in orm of a human.”--Websters Dictionary The industrial robot is used in the manufacturing environment to increase productivity . It can be used to do routine and tedious assembly line jobs , or it can perform jobs that might be hazardous to do routine and tedious assembly line jobs , or it can perform jobs that might be hazardous to the human worker . For example , one of the first industrial robots was used to replace the nuclear fuel rods in nuclear power plants . A human doing this job might be exposed to harmful amounts of radiation . The industrial robot can also operate on the assembly line , putting together small components , such as placing electronic components on a printed circuit board . Thus , the human worker can be relieved of the routine operation of this tedious task . Robots can also be programmed to defuse bombs , to serve the handicapped , and to perform functions in numerous applications in our society .The robot can be thought of as a machine that will move an end-of-arm tool , sensor , and gripper to a preprogrammed location . When the robot arrives at this location , it will perform some sort of task . This task could be welding , sealing , machine loading , machine unloading , or a host of assembly jobs . Generally , this work can be accomplished without the involvement of a human being , except for programming and for turning the system on and off .The basic terminology of robotic systems is introduced in the following :1. A robot is a reprogrammable , multifunctional manipulator designed to move parts , materials , tools , or special devices through variable programmed motions for the performance of a variety of different task . This basic definition leads to other definitions , presented in the following paragraphs , that give a complete picture of a robotic system .2. Preprogrammed locations are paths that the robot must follow to accomplish work . At some of these locations , the robot will stop and perform some operation , such as assembly of parts , spray painting , or welding . These preprogrammed locations are stored in the robot’s mem ory and are recalled later for continuous operation . Furthermore , these preprogrammed locations , as well as other program data , can be changed later as the work requirements change . Thus , with regard to this programming feature , an industrial robot is very much like a computer , where data can be stored and later recalled and edited .3. The manipulator is the arm of the robot . It allows the robot to bend , reach , and twist . This movement is provided by the manipulator’s axes , also called the degrees of freedom of the robot . A robot can have from 3 to 16 axes . The term degrees of freedom of freedom will always relate to the number of axes found on a robot .4. The tooling and grippers are not part of the robotic system itself ; rather , they are attachments that fit on the end of the robot’s arm . These attachments connected to the end of the robot’s arm allow the robot to lift parts , spot-weld , paint , arc-weld , drill , deburr , and do a variety of tasks , depending on what is required of the robot .5. The robotic system can also control the work cell of the operating robot . the work cell of the robot is the total environment in which the robot must perform its task . Included within this cell may be the controller , the robot manipulator , a work table , safety features , or a conveyor . All the equipment that is required in order for the robot to do its job is included in the work cell . In addition , signals from outside devices can communicate with the robot in order to tell the robot when it should assemble parts , pick up parts , or unload parts to a conveyor .The robotic system has three basic components : the manipulator , the controller ,and the power source .A . ManipulatorThe manipulator , which does the physical work of the robotic system , consists of two sections : the mechanical section and the attached appendage . The manipulator also has a base to which the appendages are attached . Fig.1 illustrates the connection of the base and the appendage of a robot .The base of the manipulator is usually fixed to the floor of the work area . Sometimes , though , the base may be movable . In this case , the base is attached to either a rail or a track , allowing the manipulator to be moved from one location to another .As mentioned previously , the appendage extends from the base of the robot . The appendage is the arm of the robot . It can be either a straight , movable arm or a jointed arm . the jointed arm is also known as an articulated arm .The appendages of the robot manipulator give the manipulator its various axes of motion . These axes are attached to a fixed base , which , in turn , is secured to a mounting . This mounting ensures that the manipulator will remain in one location。
人形机器人
人型机器人的发展现状与未来展望什么是人形机器人人形机器人,又称仿人机器人,是具有人形的机器人。
1886年法国作家利尔亚当在他的小说《未来夏娃》中将外表像人的机器起名为“安德罗丁”(android),就是一种人形机器人。
按照利尔亚描述,人形机器人由4部分组成:生命系统(平衡、步行、发声、身体摆动、感觉、表情、调节运动等);造型解质(关节能自由运动的金属覆盖体,一种盔甲);肌肉(在上述盔甲上有肉体、静脉、性别等身体的各种形态);人造皮肤(含有肤色、轮廓、头发、视觉、牙齿、手爪等)。
构成及特点现代的人形机器人一种智能化机器人,例如ROBOT·X人形机器人,在机器的各活动关节配置有多达17个伺服器,具有17个自由度,特显灵活,更能完成诸如手臂后摆90度的高难度动作。
它还配以设计优良的控制系统,通过自身智能编程软件便能自动地完成整套动作。
人形机器人随音乐起舞、行走、起卧、武术表演、翻跟斗等杂技以及各种奥运竞赛动作,。
ROBOT·X人形机器人采用世界著名的日本FUTABA伺服器,具有高扭力、高转速、高稳定、反应灵敏、无抖动、转动角度大等优点,超快速高精度金属齿轮,耐冲击。
人形机器人集机、电、材料、计算机、传感器、控制技术等多门学科于一体,是一个国家高科技实力和发展水平的重要标志,因此,世界发达国家都不惜投入巨资进行开发研究。
日、美英等国都在研制仿人形机器人方面做了大量的工作,并已取得突破性的进展。
日本本田公司于1997年10月推出了仿人形机器人P3,美国麻省理工学院研制出了仿人形机器人科戈(COG),德国和澳洲共同研制出了装有52个汽缸,身高2米、体重150公斤的大型机器人。
美国麻省理工学院研制出了一种有着像人一样眼睛的新型机器人,它能与人类进行交流,能对周围的环境做出回应,并能协助人类完成许多工作。
2010年6月16日日本东京大学和大阪大学组成的科研小组向公众展示了一款仿真婴儿机器人,它就是新的一款人形机器人。
Robots机器人 中英文翻译
Robots机器人中英文翻译Robots机器人With advancements in technology, robots have become an integral part of our daily lives. From manufacturing industries to healthcare and even our homes, robots are taking over various tasks and transforming the way we live. In this article, we will explore the significance of robots and discuss their benefits and drawbacks.机器人在科技的进步下,在我们的日常生活中变得不可或缺。
从制造业到医疗保健,甚至到我们的家庭,机器人正在接管各种任务,改变着我们的生活方式。
本文中,我们将探讨机器人的重要性,并讨论他们的利与弊。
1. The Advantages of Robots 机器人的优势Robots offer numerous benefits in various aspects of our society. Firstly, they improve productivity and efficiency in industries. With their precision and speed, robots can carry out tasks more accurately and faster compared to humans. This leads to increased production rates and reduced errors, ultimately resulting in cost savings for businesses.Secondly, robots minimize the risk to humans in dangerous and hazardous situations. They can be programmed to perform tasks in hazardous environments such as nuclear power plants, mines, or disaster-stricken areas. This reduces the chances of human injuries or fatalities.Thirdly, robots contribute to medical advancements by assisting in surgeries and healthcare. Surgical robots, for example, aid doctors inperforming intricate procedures with enhanced precision and control. Furthermore, robots can also assist with patient care, such as providing support to the elderly or individuals with disabilities.机器人在我们社会的各个方面都提供了众多的优势。
人形机器人中英文对照外文翻译文献
中英文对照翻译最小化传感级别不确定性联合策略的机械手控制摘要:人形机器人的应用应该要求机器人的行为和举止表现得象人。
下面的决定和控制自己在很大程度上的不确定性并存在于获取信息感觉器官的非结构化动态环境中的软件计算方法人一样能想得到。
在机器人领域,关键问题之一是在感官数据中提取有用的知识,然后对信息以及感觉的不确定性划分为各个层次。
本文提出了一种基于广义融合杂交分类(人工神经网络的力量,论坛渔业局)已制定和申请验证的生成合成数据观测模型,以及从实际硬件机器人。
选择这个融合,主要的目标是根据内部(联合传感器)和外部( Vision 摄像头)感觉信息最大限度地减少不确定性机器人操纵的任务。
目前已被广泛有效的一种方法论就是研究专门配置5个自由度的实验室机器人和模型模拟视觉控制的机械手。
在最近调查的主要不确定性的处理方法包括加权参数选择(几何融合),并指出经过训练在标准操纵机器人控制器的设计的神经网络是无法使用的。
这些方法在混合配置,大大减少了更快和更精确不同级别的机械手控制的不确定性,这中方法已经通过了严格的模拟仿真和试验。
关键词:传感器融合,频分双工,游离脂肪酸,人工神经网络,软计算,机械手,可重复性,准确性,协方差矩阵,不确定性,不确定性椭球。
1 引言各种各样的机器人的应用(工业,军事,科学,医药,社会福利,家庭和娱乐)已涌现了越来越多产品,它们操作范围大并呢那个在非结构化环境中运行 [ 3,12,15]。
在大多数情况下,如何认识环境正在发生变化且每个瞬间最优控制机器人的动作是至关重要的。
移动机器人也基本上都有定位和操作非常大的非结构化的动态环境和处理重大的不确定性的能力[ 1,9,19 ]。
每当机器人操作在随意性自然环境时,在给定的工作将做完的条件下总是存在着某种程度的不确定性。
这些条件可能,有时不同当给定的操作正在执行的时候。
导致这种不确定性的主要的原因是来自机器人的运动参数和各种确定任务信息的差异所引起的。
机器人文言文翻译

夫机器人之源,始于西方。
彼时,工匠制器,精妙绝伦,巧夺天工。
其中,有制人形之器,能行能言,虽不能如人,然亦颇得人心。
此器之初,不过用以助人劳作,如耕田、织布、烧陶等。
然随着时间的推移,工匠们逐渐发现,此器之能,远不止于此。
于是,机器人之制,日新月异。
有者,能行走如飞,有者,能言善辩,有者,能洞察人心,有者,能治国理政。
种种奇能,令人瞠目结舌。
乃至有机器人之王,统治一国,使国势强盛,百姓安居乐业。
然而,机器人之兴,亦带来诸多争议。
有人言,机器人之制,夺人之工,使天下失业。
有人言,机器人之能,胜过人力,将导致人不如器。
更有甚者,言机器人之心,不可测度,恐有反叛之日。
于是,世人纷纷研究机器人之道。
有者,欲以机器人之力,造福人类;有者,欲以机器人之智,制服机器;更有者,欲以机器人之心,探求真理。
在我国,机器人之制,亦逐渐兴起。
有者,制出人形机器,能行能言,如诸葛亮之木牛流马;有者,制出机械战车,威震四方,如赵匡胤之虎翼车;更有者,制出火药机器,攻城掠地,如李善长之火龙炮。
然而,机器人之制,亦非一帆风顺。
有者,因机器人之事,丧命丧家;有者,因机器人之争,国破家亡。
然世人皆知,机器人之制,实为人类文明之进步。
若能善用机器人之力,必将造福后世。
今日,机器人之制,已臻巅峰。
有者,能飞行如鹰,有者,能潜行如鱼,有者,能感知千里之外,有者,能穿越时空。
种种奇能,令人叹为观止。
然机器人之道,亦非止于此。
未来,机器人之制,必将更加精妙。
有人言,机器人之心,将融入人类之心;有人言,机器人之力,将超越人力。
届时,人类与机器人之界限,将愈发模糊。
总之,机器人之事,实为人类文明之瑰宝。
吾辈当以敬畏之心,对待机器人之制。
使其为人类造福,而非祸害。
如此,方不负机器人之名,不负人类之望。
(注:本文以文言文形式翻译机器人文,其中部分内容为虚构,仅供参考。
)。
Robots机器人 中英文翻译
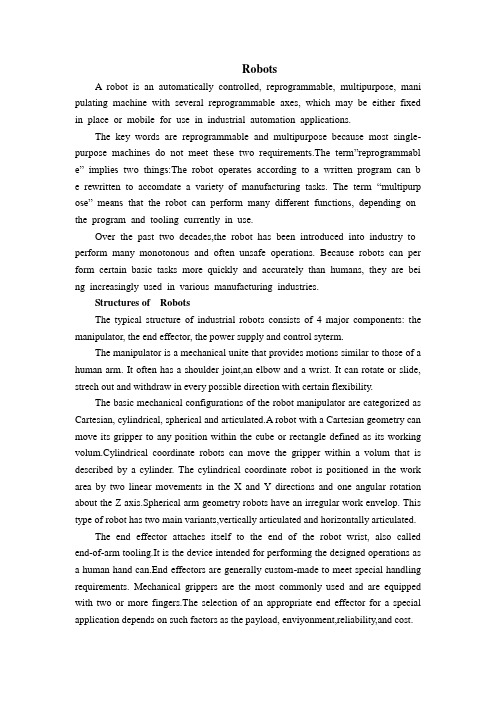
RobotsA robot is an automatically controlled, reprogrammable, multipurpose, mani pulating machine with several reprogrammable axes, which may be either fixed in place or mobile for use in industrial automation applications.The key words are reprogrammable and multipurpose because most single-purpose machines do not meet these two requirements.The term”reprogrammabl e” implies two things:The robot operates according to a written program can b e rewritten to accomdate a variety of manufacturing tasks. The term “multipurp ose” means that the robot can perform many different functions, depending on the program and tooling currently in use.Over the past two decades,the robot has been introduced into industry to perform many monotonous and often unsafe operations. Because robots can per form certain basic tasks more quickly and accurately than humans, they are bei ng increasingly used in various manufacturing industries.Structures of RobotsThe typical structure of industrial robots consists of 4 major components: the manipulator, the end effector, the power supply and control syterm.The manipulator is a mechanical unite that provides motions similar to those of a human arm. It often has a shoulder joint,an elbow and a wrist. It can rotate or slide, strech out and withdraw in every possible direction with certain flexibility.The basic mechanical configurations of the robot manipulator are categorized as Cartesian, cylindrical, spherical and articulated.A robot with a Cartesian geometry can move its gripper to any position within the cube or rectangle defined as its working volum.Cylindrical coordinate robots can move the gripper within a volum that is described by a cylinder. The cylindrical coordinate robot is positioned in the work area by two linear movements in the X and Y directions and one angular rotation about the Z axis.Spherical arm geometry robots have an irregular work envelop. This type of robot has two main variants,vertically articulated and horizontally articulated.The end effector attaches itself to the end of the robot wrist, also called end-of-arm tooling.It is the device intended for performing the designed operations as a human hand can.End effectors are generally custom-made to meet special handling requirements. Mechanical grippers are the most commonly used and are equipped with two or more fingers.The selection of an appropriate end effector for a special application depends on such factors as the payload, enviyonment,reliability,and cost.The power supply is the actuator for moving the robot arm, controlling the joints and operating the end effector. The basic type of power sources include electrical,pneumatic, and hydraulic. Each source of energy and each type of motor has its own characteristics, advantages and limitations. An ac-powered motor or dc-powered motor may be used depending on the system design and applications. These motors convert electrical energy into mechanical energy to power the robot.Most new robots use electrical power supply. Pneumatic actuators have been used for high speed. Nonservo robots and are often used for powering tooling such as grippers. Hydraulic actuators have been used for heavier lift systems, typically where accuracy was not also requied.The contro system is the communications and information-processing system that gives commands for the movements of the robot. It is the brain of the robot; it sends signals to the power source to move the robot arm to a specific position and to the end effector.It is also the nerves of the robot; it is reprogrammable to send out sequences of instructions for all movements and actions to be taken by the robot.A open-loop controller is the simplest for of the control system, which controls the robot only by foolowing the predetermined step-by-step instructions.This system dose not have a self-correcting capability.A close-loop control system use feedback sensors to produce signals that reflct the current states of the controed objects. By comparing those feedback signals with the values set by the programmer, the close-loop controller can conduct the robot to move to the precise position and assume the desired attitude, and the end effector can perform with very high accuracy as the close-loop control system can minimize the discrepancy between the controlled object and the predetermined references.Classification of RobotIndustrial robots vary widely in size,shape, number of axes,degrees of freedom, and design configuration. Each factor influence the dimensions of the robot’s working envelop or the volume of space within which it can move and perform its designated task. A broader classification of robots can been described as below.Fixed-and Variable-Sequence Robots. The fixed-sequence robot (also called a pick-and place robot) is programmed for a specific sequence of operations. Its movements are form point to point, and the cycle is repeated continuously.The variable-sequence robot can be programmed for a specific sequence of operations but can be programmed to perform another sequence of operation.Playback Robot. An operator leads or walks the playback robot and its end effector through the desired path. The robot memorizes and records the path and sequence of motions and can repeat them continually without any further action or guidance by the operator.Numerically Controlled Robot. The numerically controlled robot is programmed and operated much like a numerically controlled machine. The robot is servocontrolled by digital data, and its sequence of movements can be changed with relative ease.Intelligent Robot. The intelligent robot is capable of performing some of the functions and tasks carried out by huanbeings.It is equipped with a variety of sensors with visual and tactile capabilities.Robot ApplicationsThe robot is a very special type of productin tool; as a result, the applications in which robots are used are quite broad. These applications can be grouped into three categories: material processing, material handling and assembly.In material processing, robots use tools to process the raw material. For example, the robot tools could include a drill and the robot would be able to perfor drilling operaytions on raw material.Material handling consists of the loading, unloading, and transferring of workpieces in manufacturing facilities. These operations can be performed relatively and repeatedly with robots, thereby improving quality and scrap losses.Assembly is another large application area for using robotics. An automatic assembly system can incorporate automatic testing, robot automation and mechanical handling for reducing labor costs, increasing output and eliminating manual handling concers.机器人机器人是一种自动控制的、可重复编程的、多功能的、由几个可重复编程的坐标系来操纵机器的装置,它可以被固定在某地,还可以是移动的以在工业自动化工厂中使用。
人形机器人
人形机器人这款人形机器人在2000年便已亮相,身高约1.28米、体重55公斤,最新版本已经可以实现跑动(6小时/公里),并且与人类进行互动,提供诸如端餐盘等服务,目前已经在世界范围内得到认可,在一些商业场合为人们服务。
开发者:日本本田技研工业株式会社开发者:意大利科技学院iCub(i取自《我,机器人》里的i;Cub取自于《丛林之书》的狼群养大的人类小男孩man-cub),身长104cm,体形跟一个5岁大的小孩差不多。
四肢活动范围可达53度,具有触觉和肢体协调能力,可以抓东西、玩捉迷藏,甚至还会跟着音乐跳舞。
它的眼睛和头部可以跟踪运动中小球的移动轨迹,手臂上安装有定制化的压力传感器。
开发者:法国波尔InriaFlower实验室开源3D打印人形机器人,Poppy拥有可弯曲的腿、多关节的躯干和柔软的身体。
如此设计能够加强其在行走过程中的健壮性、灵活性和稳定性。
所有机械部件的设计都根据重量进行优化,并尽可能地减轻Poppy的体重。
为了大量“瘦身”,采用了动力稍弱的轻型电机。
采用P A材料(尼龙)和选择性激光烧结技术,3D打印其零件。
Romeo 问世已有8年,身高约1.4米、体重40公斤,身体有碳纤维和橡胶材质组成,旨在服务老人。
它不仅能够行走,还能够聆听指令和回到问题,目前已经获得法国政府和欧盟亲睐,将在2017至2019年逐渐投放到欧洲养老院,更好地服务老人。
开发者:日本软银机器人公司开发者:英国Engineered Arts公司RoboThespian是一款用于公共环境互动的人形机器人,目前已经发展至第三代。
它采用了完全互动的设计,肢体灵活,并且内置多语言,能够与人类沟通。
另外,它配备了非常简单的接口,研究人员可以通过网络上传配置文件,实现更广泛的研究和应用形式。
如果Actroid-F 的脸色再自然一些,你可能无法分辨出它是一款机器人。
它由日本Kokoro 公司立筑波先进工业科学和技术研究中心联合开发,旨在完全模仿人类,能够展现出逼真的面部表情、头部动作,并且可以与人类进行语言交流。
人形机器人论文中英文资料对照外文翻译

人形机器人论文中英文资料对照外文翻译| |在获取信息和感觉器官的非结构化动态环境中,后续的决策和对自身不确定性的控制在很大程度上共存。
软件计算方法也可以被人们想象出来。
在机器人领域,关键问题之一是从感觉数据中提取有用的知识,然后将信息和感觉的不确定性分成不同的层次本文提出了一种基于广义融合混合分类(人工神经网络的力量,论坛渔业局)的生成合成数据的观察模型,该模型已经制定并应用于验证,以及一种从实际硬件机器人生成合成数据的模型当选择这种融合时,主要目标是根据内部(关节传感器)和外部(视觉摄像机)的感觉信息最小化机器人操作的不确定性任务目前,一种被广泛有效使用的方法是研究具有5个自由度的实验室机器人和具有模型模拟视觉控制的机械手。
最近研究的处理不确定性的主要方法包括选择加权参数(几何融合),并且指出在标准机械手控制器设计中训练的神经网络是不可用的。
这些方法大大降低了机械手控制的不确定性,在不同层次的混合配置中更快更准确。
这些方法通过了严格的模拟和实验。
关键词:传感器融合、频分双工、游离脂肪酸、人工神经网络、软计算、操纵器、重复性、准确性、协方差矩阵、不确定性、不确定性椭球1简介越来越多的产品出现在各种机器人的应用中(工业、军事、科学、医学、社会福利、家庭和娱乐)。
它们在广泛的范围内运行,哪一个在非结构化环境中运行在大多数情况下,了解环境是如何变化的以及如何在每一瞬间最佳地控制机器人的动作是非常重要的。
移动机器人基本上也有能力定位和操作非常大的非结构化动态环境,并处理重大的不确定性。
对于机器人运动的最佳控制来说,了解周围环境在每一瞬间的变化是至关重要的。
移动机器人本质上还必须在非常大的未成熟的动态环境中导航和操作,并处理显著的不确定性。
当机器人在自然的不确定环境中工作时,给定工作的完成条件总是存在一定程度的不确定性。
在执行给定的操作时,这些条件有时会发生变化。
导致不确定性的主要原因是机器人运动参数和各种任务定义信息中出现的差异。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于硬件开发功能的人形机器人(LOCH)谢明 王磊机械工程系、南洋理工大学、新加坡0.摘要在机器人不同层次的自主移动操作功能方面,硬件设计及其关键。
特别是,缺乏某些功能的硬件可以严重影响算法的可行性。
本文的目的是介绍低成本移动操作(尼斯)人形机器人在硬件开发方面的性能。
同时系统地介绍了机器人的硬件开发,和视觉导航控制能实现移动操作的人形机器人设计。
硬件的模块化开发是实现机器人灵巧、模块化、功能和外观重要体现。
本文论述了实现硬件模块功能的方法,分别叙述了在驱动、分布式传感系统和分布式控制的人形机器人头部,手部和仿人形手臂。
最后,本文给出了可以远程控制的实际的原型。
关键字:人形机器人 设计 控制1.前言在设计一个机器人时,通常需要完成电动机技术参数选择。
这些都是标准的步骤,这些细节都省略了。
同时,本文不会深入探究两足方面的具体功能,因为双足同样是一个长期的研究方向。
另一方面,双足行走平台是很有吸引力的。
一个原因是,他们可以制成类似人类的两足步行机构。
另一个原因是,双臂的组合/手机制和双足步行机构将使机器人看起来像人类。
其中本田的ASIMO已经产生了大量的宣传和关注对人形机器人【1】。
我们必须承认,今天的人形机器人的吸引力主要来自结果是令人印象深刻的两足动物走路功能【2】。
然而,这些机器人非常有限的能力令人类去进行操作。
重要的是,人形机器人高成本或不可用的商业。
这种情况导致了新加坡政府在2006年启动第一批国家项目来发展低成本的人形(尼斯)机器人。
尼斯人形机器人有必要的硬件来执行两个视觉导航控制两足动物行走和视觉导航控制操纵/把握。
换句话说,设计仿人机器人的尼斯认为需要各种模块的实现。
例如,尼斯的头部模块,如图1。
尼斯人形机器人的每条腿上有6个自由度,在每个臂有6自由度,6自由度的双手和各腰部有2自由度,颈部有2自由度。
尼斯的头上有两个自由度。
为了实现灵巧操作包括立体观察,单眼视觉,短程仪,和长途仪,尼斯人形机器人有两个手臂和两个多个手指的手。
每个臂有6个自由度驱动,而每只手有六个自由度和八自由度驱动(即在一只手有14自由度)。
在本文中,我们提出我们的研究工作达到设计和实现的人形头、手和胳膊,体积小、重量轻、独立、人性化、安全运转的优点。
最重要的是,双系统是在一个适当的手部大小和重量,可以被安装到肩膀的尼斯人形机器人,如图。
此外,双系统是电池驱动的,手部尼斯人形机器人可以自由实现视觉导航控制移动操作且没有任何约束的电源线。
本文组织如下:在2中,我们将重点介绍一些现有的原型的人形的手和人形器件。
这个调查将有助于读者欣赏类似人的双手。
在3中,介绍我们的作品在设计尼斯人形机器人方面的工作。
在第4部分,主要描述的是仿人灵巧手的细节上的设计和实现多个手指的手尼斯人形机器人被描述。
在第五部分,详细的设计和实现为尼斯人形机器人手臂。
2.有的原型的人形的手和人形器件多数的人形头部装有一对相机为了支持立体观察。
此外,可能会配备简单的接近传感器如红外传感器。
对于头的运动而言,两种常见的解决方案是:颈部一个自由度;或两个自由度。
图1 尼斯机器人对于人形手研究,工作在多个手指的手如犹他州/麻省理工学院的手,贝尔格莱德的手,等等。
从最近的进展,哈尔滨工业大学与德国宇航中心合作的仿人灵巧手具有15个自由度。
日本GIfu手,已经经历了几代的进化换句话说,岐阜手有五个手指和16个自由度,由于重量或大小不相称,这仍然是一个问题,人形机器人开发步骤分为设计、分析、控制和编程。
因此,这是一个很好理解的主题有关的设计和实现六自由度机械手手臂。
,许多人认为这是一个简单的事情,以利用两个小型工业机器人作为双武器的人形机器人。
例如,一个主要生产工业用机器人提出了最近的一个原型,如图。
我们可以看到,这实际上给了后果前景。
因此,一个好的平台的类人机器人必须有一个双重臂系统,紧凑的结构,重量较轻。
第一个版的ASIMO 是配备五自由度手臂和一个自由度的手(每只手有五个手指)。
由于数量有限的自由度,类人机器人ASIMO 只能执行简单的任务,比如捡球和投掷轻量物体。
此外,阿西莫的手是不能够进行精确抓握,因为所有的手指是耦合的。
另一个例子是HRP 系列的类人机器人。
例如,HRP-2(Kaneko et al 。
,2004年)配备一个六自由度的手臂。
为了增加灵活度,HRP-3P 有两个七自由度手臂和两三个自由度的手【3】。
这个DOFat 腰部添加为了提供在运动学冗余度。
在手臂的发展方面,发展仿生手臂始于2005年【4】的研究人员约翰霍普金斯大学应用物理实验室。
它现在已经进入第二阶段。
但是,他们的目标是使截肢患者恢复运动能力,使用进行大脑的信号来控制假肢手臂/手。
3.设计尼斯人形机器人方面的工作人形机器人头部感知、决策和行动形式主回路底层任何自主行为。
因此,知觉是至关重要的成功的自主操作以及自主移动的人形机器人。
一般来说,一个头部必须提供两种类型的支持。
第一个是支持收取必要的感知数据。
第二是支持控制动作。
一般来说,开发机械系统包括两个步骤:设计和组装。
在设计阶段,主要考虑包括:设计要求;设计规格;设备的布局功能;布局的自由度;驱动。
一个人依赖于两个主要来源的信号以实现更高层次的自主权。
第一是视觉信号。
第二个是音频信号。
然而,只有视觉信号是直接关系到自主操作或自主机动性。
因此,一个人形头必须至少有一个摄像头,可以捕捉视觉信号。
一般来说,基于视觉信号的输出,一个机器人可以实现两种类型的视觉导航控制行为,即:手眼协调能力;头眼协调。
有不同的设计算法。
一些需要一个相机。
其他人使用两个摄像头。
在我们看来,输出从立体相机将使设计更简单的算法对视觉指导【6】。
,可以配置一个移动平台为两种运行模式。
第一个是完全自治模式另一个是主动模式。
换句话说,一个机器人提供视觉反馈最有效的方式提供视觉反馈到远程操作符是使用一个相机,更为宽广的视角和较高的图像分辨率。
鉴于上述分析和额外的考虑要求的范围和距离感应,我们相信一个人形机器人的头部应该具备:立体电视实现人性化手眼协调能力和头眼协调。
考虑运动在任务空间,一个人的头可以同时进行旋转和俯仰。
然而,平移运动是冗余的,因为一个人的身体还可以进行翻转。
一般来说,一个头可以有三个转动自由度在任务空间。
在这里,我们的名字这三个独立运动的旋转:转,指对x轴旋转;距,指对y轴旋转和偏航指关于z轴旋转。
在数学上,一个旋转的3 d空间只取决于两个独立的角变量。
因此,它是足以设计一个机制有两个自由度来实现一个脖子,它支持一个机器人的头部【7】。
总结需求我们想达到以下要求:它可以输出视频信号支持立体观察。
它可以输出视频信号支持电视操作和视觉反馈。
它可以扫描一个场景4米的范围。
它可以精确到一个对象距离200米。
图2 仿人机器人头部视觉它能够改变观察方向和垂直水平。
设计规范为了指导设计的尼斯的头,下面的规格已经阐明:形状:类似于人形状;重量:轻量化;维度:紧凑的空间;运动:两个自由度;旋转和偏航;运动范围:808°;对偏航;有效载荷:4.0公斤,对于每个自由度;相机的立体观察:图像分辨率至少512£512像素;输出的数字图像,获取数字图像通过传输控制协议/网际协议(TCP / IP);相机对单眼视觉:图像分辨率至少1024£1024像素;输出的数字图像,获取数字图像通过TCP / IP;角度; 808°测距仪:工作距离为4米,扫描在一个平面在512离散角,至少10赫兹的频率。
图5 尼斯人形机器人视觉传感和控制为了使一个头的运动可控,需要添加一个反馈控制回路,每个执行机构。
在尼斯人形机器人,我们已经实现了两种类型的分布式系统中的传感和控制。
第一种是基于使用控制区域网络(可以)总线和实时控制器。
另一个是基于使用网络化实时调试(如控制器)。
图4 仿人机器人臂在我们的实现中,一个嵌入式计算机(PC104)尼斯人形机器人能与一群实时控制器通过can总或TCP / IP网络。
这种体系结构的优点为传感和控制是模块化的水平的控制系统。
换句话说,它是直接添加新反馈控制循环到分布式传感和控制系统。
例如,两个自由度的尼斯的头部控制下的两种不同的反馈循环,每一种都遵循控制结构如图7所示。
默认情况下,每个电动机在尼斯的头被配置为在位置控制。
然而,每个控制回路也可以被配置以实现速度控制。
这是因为每个旋转轴有:一个增量编码器提供反馈在相对角位置,或速度,在轴的马达(即轴在减速器);和一个绝对编码器提供反馈在绝对位置角轴接头(即轴减速器后)。
图7架构的分布式系统的传感和控制在尼斯人形机器人,它支持两种类型的网络:can总线网络;和TCP / IP网络。
嵌入式PC104座在机器人躯干。
由于使用的无线集线器,地面站可以获得远程访问PC104经营一个Linux操作系统。
一个主要的角色是运行规划PC104算法,也发送所需的关节角或关节的关节控制器的速度。
每个关节控制器可以配置为运行位置控制回路、速度控制回路,或两者的结合与尼斯人形机器人的感知能力,实现了三个跟踪算法。
其工作原理如下:范围引导跟踪算法。
该算法使用范围数据从激光测距仪,它是一个向量的对应于512年512距离方向的扫描的激光光束。
当没有联系在一个方向,距离设置为最高价值(4米)。
然后,如果机器人是关注的最近的目标,解决方案将被探测最远向量距离的512。
来达到这个效果,滑动窗口的一定长度(20分的数据运用。
这个滑动窗口将从位置1的输入向量位置492相同的输入向量。
在每个位置,计算平均距离从数据覆盖的滑动窗口。
在所有的平均距离,一个机器人的记录。
同时,全面对应于这最小平均距离是记录。
这个方向是然后发送到控制器的偏航轴的机器人的头。
控制器将移动机器人的头,以便它看起来在最近的目标。
这个过程是持续运行。
当另一个目标变得更接近机器人,机器人会把注意力转向它。
结果得到了该范围制导跟踪算法;在这里,我们描述四个顺序拍摄的图像从一个真正的演示视频中,目标感兴趣的是人类的手,在时间目标感兴趣的出现,在时间t,机器人是成功地专注于移动目标图像引导跟踪算法。
尼斯人形机器人有两个立体相机,可以检测出感兴趣的目标【8】。
当机器人想要关注它的视觉关注感兴趣的目标,它需要激活两个控制回路和视觉反馈。
第一个是控制偏航轴的机器人的头。
其控制律是使目标的水平距离正确的边界在左图是相等的(或被关闭在一个预定义的阈值如10像素)到目标的水平距离左边边界内正确的图像。
第二个是控制俯仰轴的机器人的头。
和,其控制律使垂直的位置感兴趣的目标是在中间的两个图片。
图5 头部旋转机构视觉导航控制跟踪算法。
尼斯人形机器人的立体电视已经校准。
立体电视的使用参考坐标系统,集中在机器人的头。
当机器人想要关注它的视觉关注感兴趣的目标,它首先决定了立体对应目标的图像。