基于Camshift和卡尔曼滤波的人脸跟踪
基于Kalman滤波和Mean Shift算法的人眼实时跟踪

万方数据174模式识别与人工智能17卷方法不仅具有直观、实现简单和快速等优点,而且对姿态变化不敏感【4],因此,在本文中,对于彩色图像即采用此人脸检测及定位方法.在检测出人脸之后,就用Blob操作确定人脸的高度和宽度,然后运用下述方法来确定眼睛的位置.而对于灰度图,则可直接运用下述方法实现眼睛定位.为了说明人眼的检测定位过程,本文从Surfim—age人脸数据库中选出一幅图像进行眼睛定位.图2为人脸灰度图,先对图2做垂直灰度投影,为了减少噪声的影响,须将垂直灰度投影曲线进行平滑,平滑前和平滑后的垂直投影曲线如图3所示.根据曲线中主要凸峰的左右边界即可确定人脸的左右边界(图4).再对图4做水平灰度投影,并对水平投影曲线进行平滑操作,所得曲线如图5所示.根据曲线确定头顶及鼻中部形成的上下边界,由此确定眉跟区域(图6).最后用SOBEL算子求出眉眼区域的边缘图,并进行边缘分组,定位出眼睛的位置(图7),以此位置作为眼睛跟踪的初始值,并构造人眼的初始模板.21.5l0.5图2人脸灰度图像21.5lO.5l(a)人脸的垂直灰度(b)平滑后的垂直灰度投影曲线投影曲线图3人脸的垂直灰度投影曲线图4人脸的左右边界(a)人脸的水平灰度投影曲线(b)平滑后的水平灰度投影曲线图5人脸区域的水平灰度投影曲线粼曰图6人脸的眼睛区域图7眼睛的位置3眼睛跟踪算法针对现有一些眼睛跟踪算法的缺陷,考虑到Kalman滤波和基于颜色分布特征的MeanShift算法所具有的快速迭代的特点,这里提出了综合使用Kalman滤波和MeanShift算法来实现人眼的实时跟踪.跟踪时首先要在初始帧中检测和定位出眼睛的位置,然后再构造眼睛模板.为了减小MeanShift的误差漂移,在以后的跟踪过程中要不断地更新眼睛模板.3.1Kalman滤波算法眼睛运动的特征可用位置和速度来描述.设(C。
,rt)为t时刻眼睛的位置(质心的位置),(“。
,轨)为t时刻眼睛在f方向和r方向的速度,所以t时刻眼睛的状态向量为毛=(q,让,“。
基于计算机视觉算法的视频智能监控与跟踪系统研究
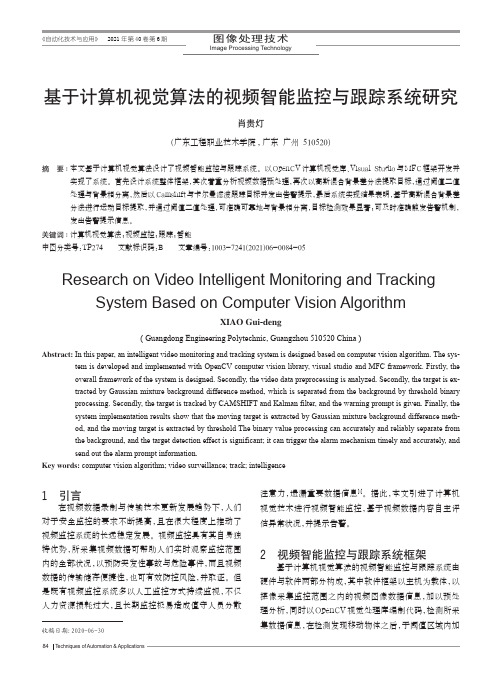
图像处理技术
Image Processing Technology
《自动化技术与应用》 2021 年第 40 卷第 6 期
以评估,并触发告警机制。视频图像通过 PC 端呈现,利 用 Visual Studio 编制于人机交互界面,以此 PC 端可实 时观看监控,并观察参数变化状态。硬件则包括计算机、 摄像头、网络设备、储存介质等等。视频智能监控与跟踪 系统框架[2]具体如图 1 所示。
抖动视频图像。
设定视频图像当前帧与前一帧匹配点集为{
;
},(x=1,2,3,∧,n)视频各帧图像综合运动存在
伸缩、旋转、平移等多种变化,其全局运动即:
(4)
z 表示视频图像伸缩变化;θ表示视频图像围绕中心 逆时针旋转角度;(df,dg)U表示视频图像中心位移。
如果图像块匹配结果是在视频某时刻前后两帧图像 匹配点对的集合中,则通过集合随机挑选两对匹配点构 成子集,即:
B 代表蓝色。
灰度化处理基于 OpenCV 提取原始图像,再把三通
道 RGB 彩色图转变为单通道灰度图,利用 OpenCV 所提
供 Cvt Colour 颜色空间转换函数,便可实现图像灰度化。
3.2 滤波处理
视频图像滤波是视频图像去噪处理的重要途径,以
中值滤波法去除噪声,基本原理为于目标像素周围选择
收稿日期:2020-06-30
84 Techniques of Automation & Applications
注意力,遗漏重要数据信息[1]。据此,本文引进了计算机 视觉技术进行视频智能监控,基于视频数据内容自主评 估异常状况,并提示告警。
2 视频智能监控与跟踪系统框架
基于计算机视觉算法的视频智能监控与跟踪系统由 硬件与软件两部分构成,其中软件框架以主机为载体,以 摄像采集监控范围之内的视频图像数据信息,加以预处 理分析,同时以 OpenCV 视觉处理库编制代码,检测所采 集数据信息,在检测发现移动物体之后,于阈值区域内加
人物识别与追踪在视频监控中的应用研究
人物识别与追踪在视频监控中的应用研究摘要:随着科技的发展,人物识别与追踪技术在视频监控领域被广泛应用。
本文旨在研究人物识别与追踪技术在视频监控中的应用,并分析其优势、挑战与未来发展趋势。
首先,人物识别与追踪技术在视频监控中可以提供快速、准确的人物信息,有助于实时监测和处理严重的安全问题。
其次,我们介绍了人物识别与追踪技术的主要方法,包括特征提取、分类器应用和追踪算法。
然后,我们分析了该技术在视频监控中的应用场景,如行为分析、事件检测和安全预警等。
最后,我们探讨了人物识别与追踪技术在视频监控中面临的挑战,并展望了其未来的发展趋势。
关键词:人物识别、人物追踪、视频监控、特征提取、分类器、追踪算法、行为分析、事件检测、安全预警1.引言在当今社会,安全问题日益凸显,各类犯罪事件频发。
为了有效地应对这些问题,视频监控系统成为了现代社会重要的安全手段之一。
然而,传统的视频监控系统对海量的视频数据进行处理和分析的能力有限,很难在面对突发事件时做出快速反应。
人物识别与追踪技术的应用可以解决这个问题,为视频监控系统提供了更准确、快速的人物信息,从而提高安全性和响应速度。
2.人物识别与追踪技术方法人物识别与追踪技术主要包括特征提取、分类器应用和追踪算法三个方面。
2.1 特征提取特征提取是指从视频中提取出适用于识别和追踪任务的特征。
常用的特征包括颜色、形状、纹理等。
颜色特征基于人的皮肤颜色或衣物颜色来进行识别,形状特征则通过提取人的轮廓和姿势信息来进行识别,纹理特征是根据人物的衣物纹理进行识别。
这些特征可以分别应用或结合使用,提高人物识别的准确性。
2.2 分类器应用分类器应用是指将特征输入到分类模型中,用于将人物与其他物体进行区分。
常用的分类器包括支持向量机(SVM)、人工神经网络(ANN)和深度学习模型等。
这些分类器通过训练样本来学习特征与人物身份之间的关系,从而实现对人物的准确识别。
2.3 追踪算法追踪算法是指在视频监控中实现对人物的持续追踪。
卡尔曼滤波在跟踪中的应用

卡尔曼滤波在跟踪中的应用
卡尔曼滤波在跟踪中的应用非常广泛。
例如,在目标跟踪中,卡尔曼滤波可以融合多个传感器的测量数据,准确地估计目标的状态,并实现对目标运动轨迹的跟踪。
卡尔曼滤波假设目标的状态和观测值都服从高斯分布,并利用贝叶斯定理不断更新目标状态的估计值。
具体而言,卡尔曼滤波包括两个主要步骤:预测和更新。
在预测步骤中,卡尔曼滤波器使用目标的先验状态来预测目标的下一个状态。
这涉及到使用目标的运动模型和传感器噪声模型来预测目标的下一个位置和速度。
在更新步骤中,卡尔曼滤波器使用目标的观测数据来更新对目标状态的估计。
这涉及到对目标的观测模型进行建模,并使用该模型来计算出新的状态估计值。
总的来说,卡尔曼滤波是一种强大的工具,可以用于处理存在不确定性的动态系统的状态估计问题。
在目标跟踪领域中,卡尔曼滤波被广泛应用于各种场景,如无人驾驶汽车、无人机跟踪、人脸识别等。
基于卡尔曼滤波的雷达航迹跟踪算法的综述
基于卡尔曼滤波的雷达航迹跟踪算法的综述雷达航迹跟踪(Radar Track Tracking)是指通过雷达系统对移动目标进行测量得到的多个目标位置信息,通过统计学方法对目标位置进行分析和处理,从而对目标进行跟踪的过程。
而卡尔曼滤波(Kalman Filter)是一种最常见的用于处理估计和控制问题的数学算法,因其卓越的性能和简单的实现被广泛应用于目标跟踪领域。
本文将综述基于卡尔曼滤波的雷达航迹跟踪算法的原理、应用及优缺点等方面。
1.基本原理卡尔曼滤波是一种基于贝叶斯定理的递归估计方法,其本质是通过利用目标运动的状态和观测数据的误差信息动态更新目标的状态估计值和协方差矩阵,从而实现对目标运动状态的估计和预测等功能。
具体地,卡尔曼滤波的基本原理可以简述如下:(1)状态方程:考虑一般的线性离散系统,其状态方程可以表示为:x(t)=Ax(t-1)+Bu(t)+w(t)其中x(t)为t时刻目标的状态量,A为状态转移矩阵,B为输入矩阵,u(t)为外部输入信号,w(t)为过程噪声。
(2)观测方程:目标运动状态往往不能直接被观测到,但可以通过测量得到其状态的某些关联变量组成的观测量,即目标的观测量z(t)可以表示为:其中,H是观测矩阵,v(t)为观测噪声。
(3)卡尔曼滤波步骤:①预测步骤:通过状态转移方程预测目标状态量x(k)及其协方差矩阵P(k)的估计值: x^(k|k-1)=Ax(k-1|k-1)+Bu(k) P(k|k-1)=AP(k-1|k-1)A'+Q其中,x^(k|k-1)为k时刻前已知的状态,P(k|k-1)为k-1时刻状态的协方差矩阵,Q 为过程噪声的协方差矩阵。
②更新步骤:利用观测量进行状态更新:其中,K(k)为卡尔曼增益,S(k)为观测噪声的协方差矩阵。
2.应用领域卡尔曼滤波在目标跟踪领域广泛应用,主要包括雷达航迹跟踪、机器人自主导航、无人机航迹规划、车辆行驶状态的估计和控制等领域。
其中,雷达航迹跟踪是卡尔曼滤波最主要和最典型的应用领域之一。
动态场景下的基于SIFT和CBWH的目标跟踪

动态场景下的基于SIFT和CBWH的目标跟踪王芬芬;陈华华【摘要】针对动态背景下的目标跟踪,提出了基于SIFT特征和CBWH特征的卡尔曼跟踪算法。
算法利用卡尔曼滤波器预测目标的大概位置;在所在位置区域内提取SIFT特征,与第一帧和前一帧进行特征匹配,并投票获得候选目标位置;利用CBWH特征获得目标可能位置;将二者位置加权对卡尔曼滤波器预测值进行修正,得到目标位置。
实验表明,所提算法取得了较好的实验结果。
%An object tracking algorithm based on Kalman filter using scale invariant feature transform (SIFT) and CBWH is proposed to solve the problem that trackers always drift or even lose target in dynamic scenes . Kalman filter predictsan area ,each matched keypoint casts a vote for the object center ,then the voting results are evaluated by the nearest neighbor clustering , the weighted result is a candidate position of the object's center.Another possible position is calculated by mean shift tracking using CBWH .The positions above are weighted into the object's center.This center is then sent to Kalman filter to get the final position and velocity . Experimental results demonstrate that the proposed method obtains good tracking results .【期刊名称】《杭州电子科技大学学报》【年(卷),期】2015(000)004【总页数】4页(P46-49)【关键词】动态场景;目标跟踪;卡尔曼滤波;尺度不变特征变换【作者】王芬芬;陈华华【作者单位】杭州电子科技大学通信工程学院,浙江杭州310018;杭州电子科技大学通信工程学院,浙江杭州310018【正文语种】中文【中图分类】TP391运动目标跟踪是计算机视觉的重要研究方向,其中对先验未知的物体进行跟踪越来越引起人们的关注。
基于人脸跟踪与识别的行人闯红灯取证系统的设计与实现
基于人脸跟踪与识别的行人闯红灯取证系统的设计与实现韦勇;万旭;徐海黎;沈标【摘要】针对交叉路口行人频繁闯红灯的现象,提出一种基于人脸跟踪和人脸识别的行人闯红灯取证解决方案.行人闯红灯取证系统分为前端抓拍部分和后台比对查询部分,主要包括信息采集模块、人脸检测跟踪模块、报警模块和比对识别模块.系统采用改进的AdaBoost算法检测人脸,提出基于Camshift和轨迹预测的多人脸跟踪算法,以解决传统Camshift算法跟踪目标需手动绘制、跟踪目标单一和背景区域干扰大的缺点,实现了多人脸实时跟踪.后台比对查询部分采用基于卷积神经网络的方法对人脸进行比对识别.实际使用结果表明,该系统具有良好的稳定性和实时性,可有效杜绝"中国式过马路"现象.【期刊名称】《现代电子技术》【年(卷),期】2018(041)019【总页数】4页(P36-39)【关键词】行人闯红灯;多功能报警;人脸检测;人脸跟踪;人脸抓拍;人脸识别【作者】韦勇;万旭;徐海黎;沈标【作者单位】南通大学机械工程学院,江苏南通 226019;南通大学机械工程学院,江苏南通 226019;南通大学机械工程学院,江苏南通 226019;南京蓝泰交通设施有限责任公司,江苏南京 210019【正文语种】中文【中图分类】TN911.73-34;TP391.40 引言近年来,随着城市道路交通的迅速发展,机动车的数量日益增多。
在我国城市交叉路口,行人过马路闯红灯的现象较为常见,尤其当群体行人数量达到4人时,最容易激发人群的集体闯红灯行为,这种行为被称为“中国式过马路”[1⁃4]。
行人闯红灯的行为不仅会威胁人身安全,还会诱发交通事故,影响交通秩序。
为了提高城市交通秩序、保障人民群众的生命安全、倡导文明出行,需要对行人闯红灯行为进行检测识别,并做出一些相应的提醒和处罚措施,提高行人在道路交通中的自觉意识[5⁃6]。
本文提出了基于人脸跟踪和识别技术的行人闯红灯取证系统的解决方案,用信息化、智能化的手段加强对城市道路交通的管理,推动智慧交通、智慧城市的建设。
轨迹跟踪方法总结 -回复

轨迹跟踪方法总结-回复轨迹跟踪是计算机视觉领域中的重要研究方向,它涉及到识别、跟踪和预测目标在连续帧中的位置。
随着计算机技术的发展和硬件的升级,轨迹跟踪方法得到了广泛的应用。
本文将以轨迹跟踪方法为主题,对其进行总结和回答一些相关问题。
一、轨迹跟踪方法的分类轨迹跟踪方法可以分为传统方法和深度学习方法两大类。
1. 传统方法传统的轨迹跟踪方法通常基于特征工程和机器学习方法。
其中,特征工程指的是从图像或视频帧中提取有用的特征,如颜色、纹理、形状等。
机器学习方法包括分类器、回归器等,其主要作用是通过学习已有的轨迹样本,预测目标的位置。
常见的传统方法包括基于卡尔曼滤波器的轨迹跟踪方法、粒子滤波器、CAMShift、Meanshift等。
这些方法在不同的场景和任务中有着各自的优势和适用性。
2. 深度学习方法近年来,深度学习方法在计算机视觉领域取得了巨大的进展,也在轨迹跟踪中得到了广泛的应用。
深度学习方法通过神经网络模型学习图像的特征表示,从而实现轨迹跟踪任务。
深度学习方法可以分为两类:基于框架的方法和端到端的方法。
基于框架的方法包括Faster R-CNN、YOLO等,其主要思想是通过在图像中检测出目标的位置,再进行跟踪。
端到端的方法则是直接学习目标的轨迹,如Siamese网络、MDNet等。
二、轨迹跟踪方法的关键技术无论是传统方法还是深度学习方法,轨迹跟踪中都涉及到一些关键技术。
1. 目标检测目标检测是轨迹跟踪的第一步,其作用是在图像或视频帧中准确定位目标的位置。
常用的目标检测方法包括基于特征的方法(如HOG、SIFT等)和基于深度学习的方法(如Faster R-CNN、YOLO等)。
2. 特征提取特征提取是轨迹跟踪中的关键步骤,其目标是将图像或视频帧中的目标转换为具有区分性的特征表示。
常用的特征提取方法包括传统的手工设计特征和深度学习方法。
3. 目标跟踪目标跟踪是轨迹跟踪的核心任务,其主要目标是在连续帧中预测目标的位置。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
背景噪声,目标外观变化、运动, 实时性,鲁棒性,遮挡
针对CamShift算法进行人脸跟踪中出现的遮挡问题, 提出了一种CamShift算法结合卡尔曼滤波的人脸跟踪 方法,使用卡尔曼滤波对跟踪过程中人脸目标运动速 度和空间位置进行预测。
人脸检测和跟踪
概念简介
人脸检测算法经过不断发展,有二进小波变换的人脸检测,基于AdaBoost算法 的人脸检测以及基于Haar-like特征、级联结构的AdaBoost算法,成功应用于模 式识别领域,实现了实时人脸检测,使人脸检测技术取得了突破性进展。
不足
(1)读取的视频格式单一,且有的视频文件播放正常,但到MATLAB上播
放十分缓慢,这是转换过程中把帧率设的慢了,需要重新转换。
(2)卡尔曼滤波中的过程噪声矩阵与观测噪声矩阵选取问题。 (3)人脸检测的实际环境也相对复杂,受到背景、位姿、人种、光照、成
像设备等外部因素的影响,需要人脸检测算法适应各种不同的检测环境。探
基于Camshift和卡尔曼滤波的人脸跟踪
徐源 杨思豪
Content
1 2 3 4
概念简介
CamShift跟踪算法
卡尔曼滤波 实验结果
人脸检测和跟踪
概念简介
人脸跟踪是人脸识别技术的一项应用,是在视频或图像序列中确定某个人脸的运动轨迹及大小变化的 过程,它是进行动态人脸信息处理的第一个环节,在视频会议、视频监控、人机智能交互等方面都有 着重要的应用价值。由于人脸本身属于复杂多变的非刚体模式,在运动过程中,其大小、形状都会发 生变化,因此实现实时而可靠的人脸跟踪方法具有一定挑战性。
CamShift跟踪算法流程图
实验结果与分析
为了验证算法的有效性,采用两种方案基于CamShift算法人脸跟踪实 验以及CamShift算法结合卡尔曼滤波人脸跟踪实验。使用室内行人行 走视频进行跟踪实验(个人PC机,运行环境Windows7,Matlab R2013a,内存4G,主频2.50Ghz)。初始跟踪时,第一帧人脸检测利 用Matlab计算机视觉工具箱自带的vision.CascadeObjectDetector()函 数,利用CamShift算法结合卡尔曼滤波进行人脸跟踪,实验结果下所 示。
X (k \ k 1) A * X (k 1 \ k 1) B *U (k )
P(k \ k 1) A* P(k \ k 1) * AT Q
X (k \ k ) A * P(k \ k 1) K (k ) * Z (k ) H * X (k \ k 1)
索在视频图像中快速、准确地检测到所有人脸的位置与大小的方法,仍然是 今后研究的重点问题。
Kg (k ) P(k \ k 1) * H T /(H * P(k \ k 1) * H T R)
P(k \ k ) ( I K (k ) * H ) * P(k \ k 1)
人脸跟踪实现过程
那么卡尔曼滤波器在其中 扮演什么角色呢?
卡尔曼滤波能够在跟踪中预测运动目标参数, 从而准确地估计运动目标位置区域。
初始跟踪时,第一帧人脸检测利用Matlab计算机视觉 工具箱自带的vision.CascadeObjectDetector()函数(训 练级联分类器)。
Camshift算法简介
CamShift是MeanShift算法的改进,称为连续自适应的MeanShift算法,它的基本思 想是视频图像序列的所有帧作MeanShift运算,并在上一帧处理后,得出搜索窗的质 心,并让它作为下一帧图片处理的搜索窗的初始值,如此迭代下去。 MeanShift算法的思想很简单:利用概率密度 的梯度爬升来寻找局部最优。
CamShift算法结合卡尔曼滤波人脸跟踪实验与结果分析
CamShift算法结合卡尔曼滤波跟踪效果(从左到右分别为第30, 65, 98, 12Байду номын сангаас,167帧)
从图中可以看出,第30帧和第65帧跟踪效果良好,能对行走中的人脸实现有效跟踪;在第98帧和 第121帧时,虽然有遮挡影响,但跟踪窗口始终紧紧跟随人脸目标,跟踪效果良好;在第167帧,人 脸遮挡消失后,CamShift算法结合卡尔曼滤波算法也能对人脸进行正确追踪。综上对比分析表明, 卡尔曼滤波器能够预测目标的运动参数,并且能将预测的目标空间位置参数传递给候选目标初始搜 索过程,提高了人脸跟踪性能,因此,本文提出的方法有效地提高了目标跟踪的鲁棒性。
1.初始化:将输入图像变换到HSV 空间,计算基于HS分量的颜色直方 图 2.跟踪:将新图像变换到HSV空间, 计算目标直方图的反向投影,相当 于关于目标位置的概率分布图 3.迭代:通过迭代的方式不断收敛 到目标概率最大位置,即为跟踪结 果
卡尔曼滤波
卡尔曼滤波器是一种利用线性系统状态方程,通过系统输入输出观测数据,对系统状态 进行最优估计的算法。而且由于观测包含系统的噪声和干扰的影响,所以最优估计也可 看做是滤波过程。 卡尔曼滤波器的核心内容就是5条公式,计算简单快速,适合用于少量数据的预测和估 计。
CamShift算法人脸跟踪实验结果与分析
CamShift算法跟踪效果(从左至右分别为视频中第25, 56, 90, 115,160帧)
从图中可以看出,第25帧和第56帧跟踪效果良好,能对行走中人的脸部实现有效跟 踪;在第90帧和第115帧时,由于目标人脸被遮挡,跟踪窗口逐渐向干扰目标方向移 动,导致目标人脸跟踪失败;在第160帧时,由于目标人脸遮挡消失,CamShift算法 又能对人脸进行正确追踪。由此可见,CamShift算法能够很好的对人脸进行实时跟踪, 但当人脸受到遮挡后,它不能预测出相应的人脸目标信息,导致人脸跟踪失败。