基于气动人工肌肉变刚度并联减振系统模型及特性研究
并联机器人刚度与静力学研究现状与进展_艾青林
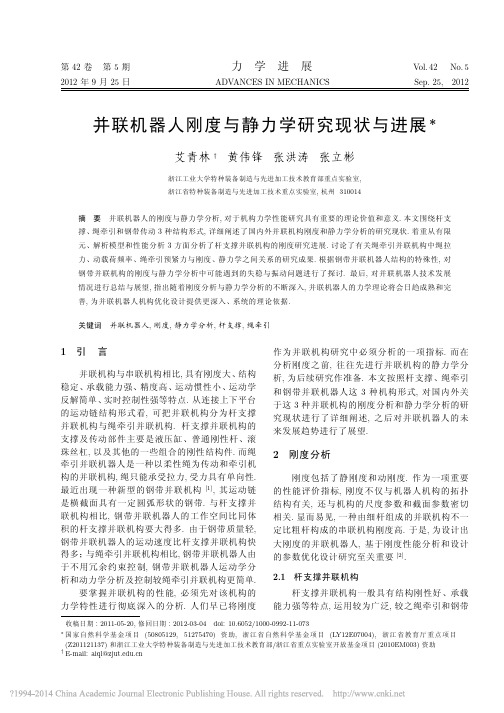
第42卷第5期力学进展Vol.42No.5 2012年9月25日ADVANCES IN MECHANICS Sep.25,2012并联机器人刚度与静力学研究现状与进展∗艾青林†黄伟锋张洪涛张立彬浙江工业大学特种装备制造与先进加工技术教育部重点实验室,浙江省特种装备制造与先进加工技术重点实验室,杭州310014摘要并联机器人的刚度与静力学分析,对于机构力学性能研究具有重要的理论价值和意义.本文围绕杆支撑、绳牵引和钢带传动3种结构形式,详细阐述了国内外并联机构刚度和静力学分析的研究现状.着重从有限元、解析模型和性能分析3方面分析了杆支撑并联机构的刚度研究进展.讨论了有关绳牵引并联机构中绳拉力、动载荷频率、绳牵引预紧力与刚度、静力学之间关系的研究成果.根据钢带并联机器人结构的特殊性,对钢带并联机构的刚度与静力学分析中可能遇到的失稳与振动问题进行了探讨.最后,对并联机器人技术发展情况进行总结与展望,指出随着刚度分析与静力学分析的不断深入,并联机器人的力学理论将会日趋成熟和完善,为并联机器人机构优化设计提供更深入、系统的理论依据.关键词并联机器人,刚度,静力学分析,杆支撑,绳牵引1引言并联机构与串联机构相比,具有刚度大、结构稳定、承载能力强、精度高、运动惯性小、运动学反解简单、实时控制性强等特点.从连接上下平台的运动链结构形式看,可把并联机构分为杆支撑并联机构与绳牵引并联机构.杆支撑并联机构的支撑及传动部件主要是液压缸、普通刚性杆、滚珠丝杠,以及其他的一些组合的刚性结构件.而绳牵引并联机器人是一种以柔性绳为传动和牵引机构的并联机构,绳只能承受拉力,受力具有单向性.最近出现一种新型的钢带并联机构[1],其运动链是横截面具有一定圆弧形状的钢带.与杆支撑并联机构相比,钢带并联机器人的工作空间比同体积的杆支撑并联机构要大得多.由于钢带质量轻,钢带并联机器人的运动速度比杆支撑并联机构快得多;与绳牵引并联机构相比,钢带并联机器人由于不用冗余约束控制,钢带并联机器人运动学分析和动力学分析及控制较绳牵引并联机构更简单.要掌握并联机构的性能,必须先对该机构的力学特性进行彻底深入的分析.人们早已将刚度作为并联机构研究中必须分析的一项指标.而在分析刚度之前,往往先进行并联机构的静力学分析,为后续研究作准备.本文按照杆支撑、绳牵引和钢带并联机器人这3种机构形式,对国内外关于这3种并联机构的刚度分析和静力学分析的研究现状进行了详细阐述,之后对并联机器人的未来发展趋势进行了展望.2刚度分析刚度包括了静刚度和动刚度.作为一项重要的性能评价指标,刚度不仅与机器人机构的拓扑结构有关,还与机构的尺度参数和截面参数密切相关.显而易见,一种由细杆组成的并联机构不一定比粗杆构成的串联机构刚度高.于是,为设计出大刚度的并联机器人,基于刚度性能分析和设计的参数优化设计研究至关重要[2].2.1杆支撑并联机构杆支撑并联机构一般具有结构刚性好、承载能力强等特点,运用较为广泛,较之绳牵引和钢带收稿日期:2011-05-20,修回日期:2012-03-04doi:10.6052/1000-0992-11-073∗国家自然科学基金项目(50805129,51275470)资助,浙江省自然科学基金项目(LY12E07004),浙江省教育厅重点项目(Z201121137)和浙江工业大学特种装备制造与先进加工技术教育部/浙江省重点实验室开放基金项目(2010EM003)资助†E-mail:aiql@584力学进展2012年第42卷并联机构,其最大特点就是刚度大.而关于并联机构刚度分析的文献大部分是针对杆支撑并联机构的.2.1.1静刚度从对杆支撑并联机构的静刚度分析总结中发现,现有的静刚度分析方法包括有限元分析法、静刚度解析模型法、静刚度性能分析法等.2.1.1.1有限元分析法随着计算机技术的发展,有限元分析法成为了并联机构设计和静刚度性能预估的重要手段.该方法主要是借助如ANSYS等有限元分析软件对所设计的虚拟样机进行应力应变分析,从而对样机的尺寸结构参数等进行改进.静刚度是金属切削机床重要的性能指标之一,提高机床的静刚度有利于提高机床的效率、加工精度和表面加工质量.在计算新型3-TPS并联机床的静刚度时,罗继曼等[3]应用有限元分析软件ANSYS仿真了不同位姿下的静刚度,得到沿主刚度方向的刚度比其他方向大,以及远离极限位置可以提高刚度的结果.为研究新型四自由度并联机床的刚度,Cor-radini等[4]和Company等[5]采用一种用多梁表达模型的有限单元分析方法.对于典型机构6-UPS 并联机床的静刚度问题,李育文等[6]是基于该机床的有限元模型,通过过渡点并利用Matrix27单元来定义铰链本身的刚度,以表现铰链本身的变形情况.在研究并联刨床时,刘红军等[7]采用有限元软件对其床身框架及平面约束机构进行刚度分析,并以仿真和实验方式进行刚度特性研究的验证.陈光伟等[8]建立了新型龙门式并联机床平面并联机构整机静刚度的有限元模型,得到动平台在广义工作空间下的刚度分布规律.另外,吴镇等[9]在子结构和结构对称的基础上,采用有限单元数值仿真,对Isoglide3-T3并联机构进行刚度分析.Li等[10]先建立改进型3-PRC全柔性并联微操作机构的模型,之后利用有限元软件ANSYS分析了该模型的刚度和静力学,从中获得了该机构相关结构参数的刚度变化趋势.而Xu等[11]对新型XYZ柔性并联微操作机构建立了工作空间内的刚度模型,并用有限元分析软件ANSYS的非线性静力分析功能测试了其刚度模型.从分析过程与结果中发现,利用有限元软件计算分析机构刚度虽然精确度较高,但其耗时多,工作量大.于是,为便于对并联机构多参数变量进行优化设计,可以建立静刚度的解析或半解析模型.2.1.1.2静刚度解析模型静刚度解析模型就是建立机构操作力与末端器变形之间映射关系.早在20世纪90年代,Cho 等[12]就根据运动影响系数,给出了一种通用运动并联系统的完整解析模型和反驱动系统的刚度公式解析方法,解决了混联操作器系统的系统化建模问题.通过几何关系Lee等[13]推导出了并联机器人静刚度模型的计算公式.另外,Gosselin[14]根据虚功原理,给出了空间机构操作力与末端变形之间的映射关系.近几年来,Chakarov[15]建立了冗余并联机构的刚度解析模型,并得出了该机构的刚度控制图谱.而对于柔性机构,Dong等[16]通过组合单个柔性铰链的刚度模型和公式化约束方程,建立了整个柔性机构的系统刚度解析模型,并提出了刚度的图形分析方法.Pham等[17]将柔性部件以串联或并联的方式连接起来,建立刚度解析模型.该模型允许建立刚度与尺寸之间的函数关系,但排除了在设计过程中柔性并联机构的自由变形.通过采用螺旋理论方法求出4-RUC 四自由度并联机构的雅可比矩阵,韩书葵等[18]推导了四自由度并联机器人的刚度计算公式.而对于Stewart平台[19],El-Khasawneh等[20]计算了其在不同方向上变化的解析刚度,给出了在给定姿态下寻找机构最小最大刚度及其方向的方法,并得出Stewart平台最小最大任意方向和单尺度刚度图.为研究并联机构在机床领域的运用,陈俊等[21]建立了四自由度混联机床并联部分的支链子系统、机架子系统和整机的刚度解析模型,并分析评价了该混联机床并联部分的刚度.吕亚楠等[22]利用刚度矩阵组集方法和考虑轴承导轨系统,建立了XNZ2010型冗余驱动混联机床并联机构的可变整机刚度解析模型.Lu等[23]还得到了对称四自由度4SPS+SP并联运动机床的总刚度解析矩阵.注意到并联机构静刚度映射和雅可比矩阵的必然联系这一特性.Han等[24]建立了3-RPS 并联机床包括力雅可比矩阵变化的瞬时刚度模型,并用例子证明了雅可比矩阵变化对3-RPS并联机床瞬时刚度模型的影响.王友渔等[25]对含有恰约束支链的Tricept机械手三自由度球坐标型并联机构提出了完备静刚度映射解析模型的简单建模方法.汪满新等[26]基于全变形雅可比矩阵,建立一种新型混联机器人模块Bicept的静刚度半解析模型.该方法首先将末端执行器位姿变形分解为无约束主动支链的拉压变形、恰约束支链的弯曲变形及其扭转变形3个部分,之后利用虚功原理和第5期艾青林等:并联机器人刚度与静力学研究现状与进展585结构矩阵法建立各子结构系统的静柔度模型,最后用线性叠加原理组装整机末端静柔度模型.另外,对一些特殊并联机构运用简单的方法会对刚度的提高起到很大作用.例如,利用静力学弹性变形概念与轴承方法,Yoon等[27]通过分析修正Delta并联连杆定位机构的解析结构刚度,从而改进设计出了具有更好平衡刚度的Delta机构.在微动器的研究中,张建军等[28]建立了6-PSS并联微动平台的静刚度模型,并求解出了其刚度矩阵.通过坐标变换和虚功原理,荣伟彬等[29]得到了3-PPSR构型六自由度并联微动机器人的静刚度矩阵模型,并从中获得各参数对该并联微动机器人静刚度的影响规律.Liu等[30]将一般宏动并联机器人的力和刚度的分析方法用于并联微动机器人,分析了雅可比矩阵的重要依据数、刚度指数与微动机器人运动链长度之间的关系,得到了所设计的运动空间中各相关指数曲线图集.最近出现的大行程柔性铰链并联机器人,在微操作、微装配、精密定位,甚至大型光学设备的大范围精密位姿调整等方面具有广泛的应用.对于6-PSS大行程柔性并联机构,孙立宁等[31-32]基于刚度方程提出其弹性模型.通过利用刚度组集加入协调方程,构建得到整机系统的刚度模型,并绘制出系统刚度影响图谱来进行系统刚度性能分析.此外,白志富等[33]利用有限元分析方法将球铰链刚度抽象成一个特征参数,加入到机构的解析模型中.从以上研究可知,在每次建立机构的静刚度解析模型时,其建立过程都较繁琐,且建模方法缺乏通用性.因此,非常有必要创建通用的静刚度建模方法,为今后研究并联机器人静刚度提供便利.2.1.1.3静刚度性能分析静刚度性能分析主要是基于静刚度解析模型来评价并联机构在整个工作空间内的静刚度性能,同时为参数设计提供参考.Carbone等[34]通过将串并混联机构的刚度性能指标公式化,来求解出刚度矩阵.在仅考虑主动关节弹性的基础上,Tsai 等[35]对比分析了4种三自由度平动机构的刚度特性.通过采用小变形叠加原理,周玉林等[36-38]分别对2-RRR+RRS球面并联机构、3-RRR三自由度球面并联机构和3-RRS三自由度球面并联机构进行分析,并以机构静力学分析结果为基础,建立整体静刚柔度矩阵并分析在整个工作空间内其静刚度性能和6个主刚度指标及所在主方向.对上述3种机构的研究表明,它们的主刚度在3个主方向上较大、另3个方向较小,而零点附近刚度较小,离零点越远刚度越大.Wu等[39]分析了带有驱动冗余度的三自由度平面并联机构的刚度和灵巧性,依据刚度指标的最小特征值指标,证实驱动冗余性能改善并联机构的刚度.魏轩等[40]对3-RRR 并联机构运动学模型推导了其雅可比矩阵,提出了一种评价并联机构刚度的评价指标.在对机床的研究中,张华等[41]对龙门式混联机床中平面三自由度并联机构的静刚度性能,提出了一种新的分析方法.此方法依据微分误差模型建立机床刚度矩阵,可计算出机床位置刚度和转动刚度的分布情况.Huang等[42]准确预估了Tripod并联机床的静刚度性能,并得到实验验证.而研究微动器时,Li等[10]在刚度解析模型的基础上评价3-PRC 并联微操作机构的静刚度性能,得到了该机构结构参数对刚度的变化趋势.Bashar等[43]通过分析Stewart平台的静刚度特性,确定了系统最大最小刚度的边界,为参数设计奠定了基础.另外,通过定义和计算平面二自由度驱动冗余并联机器人的全域性能指标,包括雅可比矩阵条件数、承载能力及刚度等,张立杰等[44]绘制出了空间模型内相应的性能图谱.从上述研究可知,静刚度性能评价指标的物理含义及使用范围各不相同,缺少统一的标准.因此制定统一的静刚度性能评价指标,能极大地推动并联机构刚度性能分析研究的发展.2.1.2动刚度动刚度反映了机构在动载荷作用下抵抗变形的能力,是衡量结构抵抗预定动态激扰能力的特性.目前国内外有关这方面研究的文献报道很少.在机床应用中,动刚度最受关注,这是由于其决定了零部件加工质量的稳定性.动刚度检测有助于我们了解在整个机械系统中力是如何产生和传递的.一般来说动刚度是一个频率的函数,它可同时测定瞬时冲击力和采样系统响应信号.在讨论了冲击试验和测量中要考虑的因素后,Xu等[45]提出了两种方案来研究机床主轴冲击试验.结果表明动刚度检测可以有效地解决机床应用上的振动问题,且发生最低动刚度处的频率比所测动刚度处的幅值更加一致.陈吉清等[46]利用螺旋矢量法,建立了机床动态加工过程中6-6Stewart并联机构的动刚度数学模型,计算了动态瞬时刚度和刀具的偏移误差,并对6-6Stewart并联机床的多种不同参数变化条件进行了数值模拟.针对典型的并联机构,敖银辉等[47]分析了在外力输入时机构的静刚度和动刚度.而梁辉等[48]采用能量法推586力学进展2012年第42卷导了3PRS/UPS冗余并联机床的动刚度模型,并对具有内力的该并联机床刚度进行分析,并给出特定位姿下的刚度计算实例.Pashkevich等[49]对三轴快速机床的一类过约束Delta并联运动机构(Orthoglide)提出一种分析机构动刚度的新方法,并依据其几何性分析了工作空间的占用率、刚度准则、转动刚度和移动刚度等.2.2绳牵引并联机构相比杆支撑并联机构而言,绳牵引并联机构中绳具有单方向受力性[50],即只能承受拉力,不能承受压力的特性.因此绳牵引并联机构的刚度分析大多是绳在受拉情况下进行的.理论分析认为,绳牵引并联机构的静刚度矩阵可分为动平台位姿变化产生的静刚度和绳位形变化产生的静刚度两项[51].目前绳牵引并联机构在飞行器风洞试验和大型望远镜领域应用广泛.在对低速风洞绳牵引并联支撑系统WDPSS-8进行静刚度分析与仿真时,胡龙等[52]认为在飞行器模型的主位置处进行准静态姿态变化时,支撑系统处于力位可控范围内,且其静刚度值满足静导数试验的要求,并以此为基础对缩比模型进行低速风洞测量试验.因并联机构的动平台位置在其工作空间内处于连续不断的变化中,使得静刚度分析需要根据位姿的变化不断进行重复分析,耗时费力.于是构造一种简易且能揭示其刚度变化趋势的解析分析模型就显得十分必要.刘欣等[53]就针对一种应用于低速风洞试验的六自由度绳牵引冗余并联机构,运用微分变换推导出了其刚度解析表达式.他们还基于微分变换和线几何理论,建立了包含关节弹性变形以及绳拉力等因素在内的绳牵引并联机器人刚度模型,并推导出其刚度矩阵数学表达式[54].汤奥斐等[55]也运用微分变换原理推导出了大型射电望远镜馈源柔索支撑系统的完整刚度的解析表达式,还对LT500m原型馈源支撑系统验证了该刚度分析方法的可行性.而对大型无线望远镜,他们把其绳支撑系统看作是绳驱动并联机器人,并以该系统的非线性模型证实了绳驱动并联机器人可达到工作空间受绳拉力、球面节点和绳长度的限制.还利用有限单元法与矩阵最小特征值估计刚度特性,建立起绳驱动并联机器人的静态刚度矩阵[56].王克义等[57]针对平面1R2T绳索牵引机构,建立系统静力螺旋平衡方程,并通过微分变换推导出动平台静刚度表达式,得出影响系统静刚度的因素为绳索拉伸刚度和绳索拉力,且两者的影响是相互耦合的.Sui等[58]研究了一种利用绳弹性与冗余驱动的刚度可变三自由度并联绳驱动机构.以静力和刚度分析为基础,根据微分变换理论推导出了节点刚度矩阵和机构总刚度矩阵,并用数值模拟证实,刚度不仅与绳刚度有关,还与绳拉力有关,且刚度变化受绳拉力控制.对于绳牵引并联机器人,动刚度也是一项基本指标,其随动载荷频率变化而变化.一般频率越高动刚度越大且趋于平坦,而在低频时动刚度变化较大.另外动刚度与振动的幅值也有关系,同一频率下振动幅值越大动刚度反而越小.但当动载荷频率与结构的固有频率相近时,有可能出现共振现象,此时动刚度最小,变形最大,应避开该共振点.为了克服绳低刚度引起的振动问题,Won 等[59]有效运用绳间的内力开发了一种基于并联绳机构的六自由度超高速机器人机构FALCON-7.通过分析该绳机器人的内部刚度,发现一些自由度的刚度不能有效地随着内力增加而增大,从而导致了预期振动问题的产生.他们还通过改进运动机构的约束,来降低由绳的弹性产生的振动,并通过实验对其进行验证.2.3钢带并联机构关于钢带并联机器人及其机构的研究在国内外仍未见报道.浙江工业大学提出了一种新型的钢带并联机器人结构,如图1所示.䕈䩶⬉ ㄦ㺙㕂Ⲃ 䕂⧗䫄图1钢带并联机器人三维模型该机构中连接上下平台的中间部件是钢带运动副装置.其中钢带横截面具有一定的圆弧弯曲第5期艾青林等:并联机器人刚度与静力学研究现状与进展587形状,能够承受一定的压力.但当该压力超过了临界失稳压力值时,机构就会产生失稳.苏先义[60]采用有限元方法对六自由度钢带并联机器人进行了失稳分析.他们介绍了钢带并联机器人的工作原理,给出了弯曲截面钢带开口薄壁类型杆件的失稳临界力计算方法,并利用有限元ANSYS软件分析了在钢带厚度、长度、姿态等因素不同的条件下,单根异形或圆弧形截面钢带、两根异形或圆弧形截面钢带联接体与6根异形或圆弧形截面钢带组成的钢带并联机构,为进一步研究钢带并联机器人的性能提供了理论依据.不同于杆支撑与绳牵引并联机构,钢带并联机构既能够承受很大的拉力,又能够承受一定的压力,且承压能力取决于钢带厚度材料及其形状.如果机构承受的压力超过了临界失稳压力值就会产生失稳.而钢带并联机器人在高速运动中,也会因为钢带质量轻且薄而发生振动.故非常有必要对钢带并联机器人静刚度及动刚度进行研究.基于以上分析,钢带并联机构的静刚度应以是否失稳作为评价的标准和依据.其动刚度应该和振动频率与幅值相关,可以通过模态识别方法对其进行研究.钢带并联机器人发生失稳和振动时其机构的刚度瞬时变为最差,因此钢带并联机器人在运动时应尽量避免失稳与振动发生.但是目前没有文献对钢带并联机构的刚度特性进行系统地研究.3静力学分析目前关于并联机构静力学研究方面的文献相对较少.但是静力学分析是机构分析的必要环节,是机构刚度分析和动力学分析的基础.文献中提到的静力学分析方法有螺旋理论法[61]、有限元法、矢量法、坐标变换、影响系数法[62]等,其中以螺旋理论法、影响因数法与有限元法的运用最广.3.1杆支撑并联机构对于杆支撑并联机构来说,静力学分析是对其进行其他力学分析的基础,一般少自由度机构静力学分析相对较简单,而多自由度机构静力学分析较复杂.静力学分析方法以螺旋理论法、影响因数法、虚功原理与有限元法居多,也不乏有矢量法、柔性摩擦圆法和虚位移法等.对于少自由度并联机构,很多学者运用不同的方法对其静力学分析进行过研究.像吴培栋等[63]对3/6-SPS并联机构应用螺旋理论,建立了静力学平衡方程并求出了该并联机构的雅可比矩阵J.在研究并联机床过程中,基于螺旋理论,Han等[64]对3-RPS 并联机床进行静力学分析,并得到一种等价于广义外力下6条链并联机床的变形协调方程.运用虚功原理也是静力学分析的一种方法,Li等[65]利用微分迭代理论和虚功原理,合成了3-UPU低移动并联机构末端器在广义力空间内的机构输入输出力间的广义力综合图.之后,他们[66]又利用虚功原理,建立少自由度并联机构输入端和末端广义力间的静力映射关系.朱春霞等[67]利用有限元软件ANSYS对特定位姿不同受力下的3-TPT并联机床整机进行静力分析,得出了在不同位姿下机床的应力应变图.另外,静力关系与速度传递关系的对偶性可通过力雅可比矩阵联系在一起.于是,静力分析中对雅可比矩阵的求解成为了重要步骤.在对3-UPS/S并联机构动平台进行静力学分析过程中,赵云峰等[68]得到了该机构的静力学雅可比矩阵和动平台静力平衡方程.Hu等[69-70]建立了3-RPS并联移动机构的6×6雅可比矩阵,并运用虚功原理建立静力学模型.他们[71]还基于观测RPS脚的约束力和虚功原理,得到2SPS+ 2RPS并联机构6×6雅可比矩阵和带有约束力的6×6刚度矩阵.Gosselin等[72]推导了六自由度空间并联机构雅可比矩阵的通用公式,从而确定了带有6个输入角度的Pluker向量.而于凌涛等[73]通过对单个杆件在铰链约束及重力作用下的受力情况进行分析,推导出3-RPS机构处于任意位姿时的连杆与动平台负载间完整静力学模型.除此之外,还可利用柔性摩擦圆法等其他方法分析.在研究微操作器时,杨启志等[74]利用伪刚体模型和柔性摩擦圆法,对三平移全柔性微动并联机构各支路与动平台进行详细的静力分析. Russo等[75-76]运用矢量法将六自由度并联机构中球质心的位置矢量表述为平台与6个驱动柱面节点方向和位置的函数,从而得到静力平衡条件表达式.Xu等[11]在考虑刚度与自然频率时,对一种新设计的XY Z柔性并联微机构,进行了静力学和动力学方面的性能评估.周玉林等[77]通过拆杆法建立机构静力学平衡方程,又利用小变形叠加原理建立起变形协调补充方程,完成对三自由度球面并联机构的静力学分析.孟祥志等[78]运用虚位移原理求解了3-TPS(RRR)并联机床各构件和末端执行器上受到各种广义外力时的静力学正逆解. Li等[79]对球面三自由度机构进行了静力学分析,。
Adams软件文档资料集锦续(四)

过给干扰力矩设定阈值来判断碰撞是否发生。在此基础上,通过引入系统误差
的方法对算法进行了改进。最后通过ADAMS及MATLAB进行了仿真与分析,结果
表明算法能够有效地、实时地检测碰撞,并且改进后的算法在阈值设定上更为
简单。
12.基于MSC_fatigue的某轻型客车车架疲劳寿命分析 针对某轻型客车杂合车在路试5 000 km时车架出现疲劳裂纹的问题,综合采用 多体动力学、有限元和疲劳分析方法对其进行疲劳破坏仿真.在 MSC.Adams/Car中建立该车的多体动力学模型得到其在B级路面的载荷历程,在
他5方向的力作为轮心激励进行整车仿真,分解得到车身接附点的疲劳分析载
荷。本文以某轿车车身载荷分解验证了该技术的工程实用性。
7.机械式挖掘机挖掘轨迹的确定 挖掘轨迹是机械式挖掘机挖掘理论研究中的重要内容,铲斗只有沿着合理的挖 掘轨迹运动,才可以实现高效和低耗作业.分析了等切削角对数螺旋线轨迹模
型的不足,并在此基础上以工作机构的运动关系为出发点,利用机构运动学理
体动力学模型,分析了重型货车在转向盘转角阶跃输入、转角脉冲输入、转
向回正、稳态回转时的转向响应特性。在整车前期工程设计阶段,对该重型
货车动力学性能参数进行摸底,并为后期优化设计提供指导作用。
11.基于力矩误差的净化机器人碰撞检测技术 为了保证净化机器人运行过程中安全性,避免造成较大损失,提出了一种基于 力矩误差的净化机器人碰撞检测技术。该方法不需要额外传感器,只需以机器 人位移、速度、加速度为输入变量,机器人所受到的干扰力矩为输出变量,通
线性振动模型,并用由伪白噪声法生成的符合实际路面统计特性的伪随机序列
来模拟路面不平度.在此基础上,利用数值算法在时域中对汽车的非线性随机
振动响应进行了计算机仿真计算研究.结果表明,这种方法对研究汽车的非线
基于模型的执行器故障诊断

弹簧老化: 弹簧材料性能老化刚度变化、过度形 变不能恢复原位、多弹簧位置错位或倒置、个别弹簧 断裂等.
16 62
浙 江 大 学 学 报( 工学版)
第 41 卷
定位器部件故障: 涉及电气转换部件故障如压电
本文研究了基于流体力学和热力学原理建立的 描述执行器气动定位系统动态特性的数学模型, 并 通过模型计算以及实测获得故障残差, 实现故障检 测, 进一步通过对残差的分析, 进行故障分离.
收稿日期: 2007- 07- 30.
浙江大学学报( 工学版) 网址: w w w . journals. z ju. edu . cn/ eng
M F2R 16B 多弹簧气动薄膜执行机构以及西门子公 司生产的 SIP ART P S2 智能电气阀门定位器( 经改 造在开环状态下工作, 仅相当于电气转换器) 进行实 验, 模型计算参数如表 2 所示. 表 2 中的压力均为绝 对压力, 参数 V 0 是根据开始阶段的等容充气的模 型计算得到, 参数 F 可以根据在弹簧范围内推杆的 动态平衡状态计算得到, S0 、k 是通过粒子群算法辨 识[ 5 ] 得到, 其他参数是由设备和环境工艺数据计算 得到.
qm=
1 RT
p2A
dx dt
+
V2
dp2 dt
.
( 3)
式中: x 为推杆位移, A 为膜片有效面积, V 0 为薄膜
气室初始体积, V 2 为薄膜气室体积, T 为管道热力 学温度, R 为气体常数.
1. 3 执行机构
根据牛顿第二定律, 可建立起执行机构的动力
学方程为
气动人工肌肉及其在双足机器人中的应用

研究学者在Chou理想模型的基础上对模型进行了修改 ,即
F ( , p) p[ A(1 )2 B]
式中:
(2)
ε
气动人工肌肉的收缩率:
L0 L L0
3 D 2 A 与气动人工肌肉有关的常数: A 4 tan 2
B 与气动人工肌肉有关的常数: B
D2
4sin 2
模型的基础上建立了相应的改进模型。
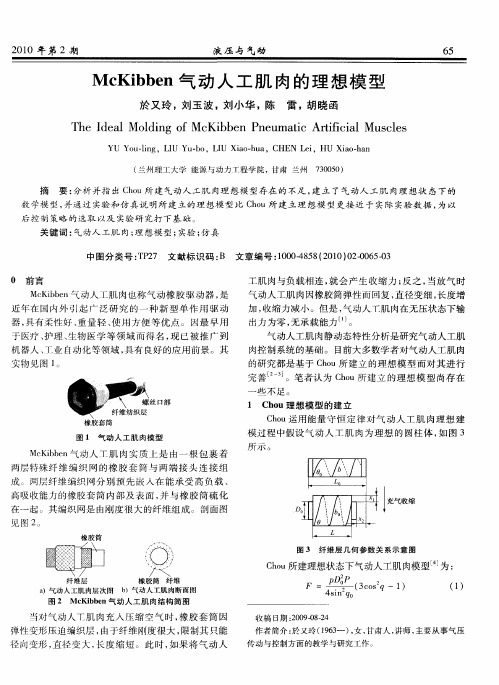
• Chou的理想模型 20世纪90年代,美国的Chou和Hannaford根据热力学第一定律的 能量守恒原理,假设气动肌肉是工作在理想状态下,即气动肌肉在运 动过程中没有能力损失,建立了气动人工肌肉的理想模型。
(1)气动人工肌肉无限长; (2)纤维刚度足够大,气动人工肌肉的在工作过程中纤维无伸长; (3)忽略橡胶的弹性; (4)忽略橡胶与编织网的摩擦;
Fig. Various types of PAMs: (a) McKibben Muscle/Braided Muscle, (b) Pleated Muscle, (c) Yarlott Netted Muscle, (d) ROMAC Muscle and (e) Paynter Hyperboloid Muscle.
正是由于现有驱动装置存在上述的种种弊端,科研人员一直没有停止 研制新型驱动器的研究工作,以克服现有驱动装置的种种弊端。
• 对于仿生机器人的驱动 :
1.电机、气缸的刚性较大,不能良好的模拟生物的柔性运动; 2.电机需要齿轮等传动装置将旋转运动转为直线运动,装置较多,效率 降低;气缸的工作状态有限;液压驱动器的体积过大; 3.仿生机器人的未来发展方向是微小型化,对于驱动器的要求也必然是 微小化,而电机、气缸和液压驱动器则难以达到这一要求;
气动双体人工肌肉结构及力学特性分析

气动双体人工肌肉结构及力学特性分析武广斌;郑永永【摘要】研发了一种气动双体人工肌肉,可实现轴向伸长及两个方向的弯曲.进行了静力学实验研究,搭建了静力学实验台,对双体人工肌肉轴向伸长进行了实验.应用Matlab拟合功能对实验结果分析,得到了双体人工肌肉轴向伸长的经验模型.该经验模型表明双体人工肌肉轴向伸长量可达肌肉本体长度25%.【期刊名称】《吉林化工学院学报》【年(卷),期】2016(033)003【总页数】3页(P53-55)【关键词】气动;人工肌肉;力学特性;经验模型【作者】武广斌;郑永永【作者单位】北华大学工程训练中心,吉林吉林132013;北华大学机械工程学院,吉林吉林132013【正文语种】中文【中图分类】TP391气动人工肌肉具有适应能力强,柔性好,噪音低,质量小,能源清洁[1]易维修等特点,国内外学者广泛的将其应用在机器人仿生领域.目前所研发的人工肌肉种类很多,从其结构、特性、控制方法上可分为五种[2]:气动轴向伸长型[3-4]、气动回转型[5]、气动三自由度型[6]、径向膨胀型[7-8]、定向弯曲型[9].每种类型均在气动人工肌肉研究上有丰硕的成果.以上五类人工肌肉结构不同,工作原理相似.依靠压力气体或液体使囊体形变,产生的作用力作为驱动力[10].双体人工肌肉结构紧凑、运动灵活具有良好的发展空间.本文进一步从结构上改进气动人工肌肉[11],研发了双体人工肌肉,对其进行了实验研究.1.1 双体人工肌肉结构及工作原理如图1双体人工肌肉是由上下连接盘将两根气动人工肌肉并联组成在一起,人工肌肉弹簧为左旋和右旋各一个,为非对称结构.并联结构设计,解决了伸长型气动人工肌肉在轴向伸长时端面扭转现象,且并联机构可增加双体人工肌肉刚度.压缩气体从两个气动接头通入到橡胶管内,由于橡胶管外侧弹簧的约束作用限制了,橡胶管的径向膨胀,最终双体人工肌肉轴向伸长.当压缩气体从其中一个气动接头通入橡胶管内时,由于另一侧气动人工肌肉的约束作用,双体人工肌肉向未充气一侧弯曲.1.2 双体人工肌肉轴向静力学模型文献[11]中单体人工肌肉轴向变形过程中假设橡胶管横截面不变.当两根气动人工肌肉同时通入相同的压力气体,双体人工肌肉通入压力气体将会产生轴向变形,根据轴向受力平衡图2所示.由受力平衡得:Fp1+Fp2=Fn1+Fn2+Fk1+Fk2通过受力平衡进行了力学分析,得出伸长量与输入气体压力关系为:公式(2)轴向伸长为非线性变化,且公式复杂,若忽略人工肌肉个体差异,则双体人工肌肉伸长量变化公式简化为:式中L:橡胶管原长;ΔL:橡胶管轴向伸长量;D1,D3:橡胶管外径;D2,D4橡胶管内径;E2:橡胶管弹性模量;P=P0-Pw 为压力差;P0输入压力;Pw为外界压力;k=G1d4/8d3n:弹簧刚度;G1:剪切模量;D:弹簧中径;n:弹簧工作有效圈数;d:弹簧丝直径;F0:弹簧预紧力.2.1 实验装置与实验原理实验系统原理图及实验照片如图3~4所示.实验系统能够实时调节双体人工肌肉气囊内的压力值.将实验数据上传到数据处理投影仪JT12A-C的上位机进行存储.在该试验系统中,将双体人工肌肉一端固定,另一端自由放置在投影平台上进行测量,可实现非接触式测量,避免测量力对实验数据造成影响.2.2 实验分析进行实验的双体人工肌肉参数如表1所示.用MATLAB处理数据得到轴线伸长量与拟合数据图5所示.在该条件下其伸长量随着气压增加而成非线性增加.采用Matlab曲线拟合工具分析得出,二次曲线较好的拟合双体人工肌肉非线性伸长特性.拟合方程为ΔL=f3(Δp)=a1Δp2+a2Δp+a3拟合参数a1=51.458;a2=6.609 5;a3=-0.207 29;将双体人工肌肉结构尺寸参数和相应的物理参数,代入理论公式3,利用MATLAB计算得到理论曲线与实验数据对比如图5所示.从实验数据与理论计算曲线的对比情况看,两者趋势相同,说明理论公式能反应变形规律.在双体人工肌肉变形过程中橡胶管横截面面积变化大,理论计算中忽略高次量,是人工肌肉轴向变形非线性产生的主要原因.从图6可得出实验数据小于双体人工肌肉理论数据.压力值在0.3 MPa以下时,理论与实验数据趋势相同,数值相差小.当压力值增大,实验和理论数据之差随之增大.因为压力值增加时,人工肌肉性能非线性变化.且双体人工肌肉所用弹簧分别为左旋和右旋各一个,制作时的不一致性.在双体人工肌肉轴向伸长中两个弹簧互相克制对方扭转、制造误差等原因使得实验数据小于理论数据.研发了新型双体人工肌肉,可直接作为末端执行器应用在机器人技术中,双体人工肌肉柔性、能源清洁能够应用在服务类机器人领域.双体人工肌肉结构可相互抵消单体人工肌肉自身扭转现象.推导了双体人工肌肉伸长理论公式,并与实验数据进行对比.得出了伸长量与输入压力值之间关系.轴向伸长量可达肌肉本体长度25%.理论模型存在局限性,但经验模型为其使用提拱了更确切的静力学模型.是通过实验数据所得,保证了模型精度.。
McKibben气动人工肌肉的理想模型
高 吸收能 力 的橡胶 套 筒 内部 及 表 面 , 与橡 胶 筒 硫 化 并
在一 起 。其编 织 网是 由刚度 很大 的纤 维组 成 。剖 面图
见 图 2 。
橡 胶筒
,
l 充气收缩
D
‘
弋0
・
.
I/ 、—
图 3 纤 维 层 几 何 参 数 关 系 示 意 图
,
/
橡 胶 筒 纤 维 a )气动 人工肌 肉层次 图 b )气动人工肌 肉断面图
C o 建理 想状 态 下气 动人工 肌 肉模 型 为 : hu所
F:
4s n q i o
( csg_1 3 o2 )
() 1
一
1 Ch u理 想模 型 的建立 o
Co h u运用 能量 守 恒 定 律 对 气 动 人 工 肌 肉理 想 建
图 1 气 动 人 工 肌 肉模 型
模 过 程 中假设 气 动 人 工 肌 肉为 理 想 的 圆柱 体 , 图 3 如
所示 。
Mc ib n气 动人 T肌 肉实 质 上 是 由一 根 包 裹 着 Kb e 两层 特殊 纤 维 编 织 网 的橡 胶 套 筒 与 两 端 接 头 连 接 组
图 5 气 动 人 工 肌 肉 端 面 几 何 不 恿 图
Mc ibn气 动 人工肌 肉也称 气 动橡 胶 驱 动 器 , Kb e 是 近年 在 国 内外 引 起 广 泛 研 究 的 一种 新 型 单 作 用 驱 动
器 , 有柔 性好 、 量 轻 、 用 方便 等优 点 。因 最早 用 具 重 使
于 医疗 、 理 、 物 医学 等 领 域 而 得 名 , 已被 推 广 到 护 生 现
气动人工肌肉系统控制性能的实验研究
[ 4 ] 于双和 ,傅佩琛 ,强文义. 模糊变结构控制及设计方 法. 哈尔滨工业大学学报 , 2001 (4) : 217~220
(上接第 15 页)
L 0 = L 1 -
4 结论
图 4 系统跟踪正弦信号的实验结果
图 5 增加外力系统跟踪正弦信号的实验结果
这由于气动人工肌肉的输出力是压力和位移 的函数 ,对于单根气动人工肌肉当位移一定时 ,肌 肉腔内的压力与负载力成正比. 当外负载力较小 时 ,腔内压力也较低. 而且 ,由于气动人工肌肉收 缩时产生拉力 , 放气伸长是通过橡胶弹性力来实 现的 ,因而该系统只能承受较低外部推力. 这些都
图 1 气动人工肌肉实验系统示意图 1 —气源 ; 2 —储气罐 ; 3 —比 例 阀 ; 4 —压 力 传 感 器 ;
5 —气动人工肌肉 ;6 —位移传感器 ;7 —负载
在进行控制操作时计算机根据 AD 采集的数 据进行控制量的计算 ,计算的控制量通过 DA 来
收稿日期 : 2003207223. 作者简介 : 杜经民 (19692) ,男 ,讲师 ;武汉 ,华中科技大学 FESTO 气动中心 (430074) . E2mail : fstfly @mail. hust . edu. cn 基金项目 : 国家自然科学基金资助项目 (50375057) .
R1 - R0
tanα
+
t1 2
si
nα
+
∫R12πρt R0
China.
气动人工肌肉是一种具有结构简单 、功率自 重比大 、有良好柔性 、不会损害操作对象的新型气 动执行元件 ,其在工业机器人 、医学等领域将会有 极其广泛的应用前景[1 ] . 本文根据文献 [ 2 ] 提出 的气动人工肌肉系统变结构控制算法 , 对单根气 动人工肌肉系统进行了实验研究 , 分析了气动人 工肌肉的控制特性.
气动人工肌肉驱动的定向传送振动盘设计
力和 进排 气 的时 间 , 力越 低 , 率越 高 。 压 频
气 动 人工 肌 肉与 同缸径 的普 通气 缸相 比具 有 以下 优点 : 始拉力 增 加 1 初 0倍 ; 动态性 能好 ; 过变 化压力 通
气 动人工 肌 肉作 为振动 盘定 向输 送 系统 的振 动发
生 器 , 此气 动振 动 发生 器 及 控 制 系 统 与机 械 料 盘 集 将
簧作用下 , 反向回转上升 , 复原位 。如此在 电磁力 作用 恢 下, 连续地对料 斗进行 螺旋 式 圆周振 动 , 使料斗 内 的 这样 杂乱件料 , 沿着料斗 内壁 的螺旋槽成行 地 向上行进 , 并从
料斗顶部进入 外 面的料道 , 往上料 器 自动上 料 。这 种 送 振动输送装置通常称 为电磁振动盘。 本 文介 绍一 种我们 研制 的利 用新 型 的气 动驱 动器
2 气 动人 工肌 肉的特点
实现轴 向精确定 位 ; 运行 平稳 ; 量轻 、 重 安装 空 间小 ; 无 运 动 的机 械零 件 , 外部 磨 损 ; 以根 据需 要制 作成任 无 可 意长度 ; 顺性 好 、 合 于活 动 的使 用 场合 。 以上特点 柔 适
使 得它 成 为理想 的振动 驱动装 置 。
成 为一体 的气 动人 工肌 肉驱 动 的定 向传送 振动 盘 。该 系 统具有 振 幅和频 率 连 续 可调 、 暴 、 静 电 、 构 简 防 抗 结 单、 控制方 便 、 精度 高 、 寿命长 、 安装 要求 低 、 平稳 性好 、 重量 轻 , 输送 的产 品不 受 电磁场 影 响 的优 点 , 为一 及 成 种全新 驱 动方式 的振动输 送装 置 。
可调 , 输送 的产 品 不 受电磁 场 影响 的优 点 。文 中给 出了该 振 动 系统 的结构 和 工作原 理 , 为振 动 输送技 术提供
一种三自由度并联机器人运动轨迹精度的可靠性研究
一种三自由度并联机器人运动轨迹精度的可靠性研究六口李兵口张晓瑾口谢里阳口魏玉兰东北大学机械工程与自动化学院沈阳110004摘要:机器人轨迹精度的可靠性是评价机构性能的重要参数。
压电材料作为一种驱动器能够抑制机器人柔性连接杆的振动,在抑制振动的同时也提高了机器人运动轨迹的精度。
首先介绍了一种三自由度平面并联机器人系统;其次表达了振动控制系统的工作原理和实验分析;然后分别表达了不考虑振动和考虑振动因素时机器人轨迹精度的可靠度计算方法;最后分析了无振动控制和有振动控制时机器人运动轨迹精度的可靠度。
可靠度计算表明,振动控制系统能够提高机器人运动轨迹精度的可靠度。
关键词:并联机器人减振轨迹精度可靠性中图分类号:TP2420328文献标识码:A文章编号:1000一4998(2010)lO—O005一04Abstract:Thereliabilityofthetrajectoryaccuracyofthemnipulatorisimponantp啪metertoevaluatetheperfomanceoftIlem粕ipulator.ThevibmtionoftIlenexiblelinkIge8ofthem肌ipulatorc锄besuppressedwhenthepiezoelectricmaterialisu鸵d鹊a咖sducer.Andthekine啪tictrajectoryaccuracyofthem锄ipulatorisimprovedatthes舢etime.Athree—degree—of—f}eedompl衄盯paraUelrnanipulatori8in删ucedfirst.Thentheworkingprincipleandexperimentalanalysisofthevibrationsuppression8ystema聆pre鸵med.Thecalculatingmethodsofthereliabilityofthet阳jectoryaccuracyof山e毗njpulatorwithwithoutvibmtionfactorcorIside陀dalsoprovided.Finally,tlIe陀liabilityofkinematict陋jectory∞curacyofIhemIlipIllatorwithwithout、ribmtionsupp陀ssionis锄lyzed.Theresultsshowthatthereliabilityofthekinematictmjectoryaccumcyofthe眦nipulatorbeimpmvedwit}Ithehelpofvibmtionsuppres8ion.Keywords:Par棚elMaIIipIllatorVmmti帅Su坤re辎i伽TrajectoryAc饥ncyReIiability并联机器人具有刚度大、运动精度高等优点而被广泛使用在航天工业和制造业中…。
智能控制气动人工肌肉座椅减振特性研究
主动缓 冲减振模 型 ; 以白噪声模拟路 面输入 , 采用智能 B P神 经 网络 PD控制对座 椅的减振特 性进行研 I 究。并 以座椅加速度 和位 移的最大值 、 小值 、 准差 三项指 标进行 对比分析 。仿 真结 果表 明, 最 标 在选 定 的 3种 工况下, c i e M kb n型气动人工肌 肉缓冲座椅较传统座 椅可显 著减 小路 面激励 对驾驶 员的振动 冲 b
履带式 工 程 车辆 驾 驶 员 通 常在 低 速 大 负 载 工 况下 作业 , 主要 承受 垂 直方 向 的 冲击 载 荷 , 因此 仅
考虑座椅垂直方向的振动冲击 ; 由于 P M只产生 又 A
轴 向收缩力 而无 伸 张力 , 因此 采 用 在 座 椅 面上 下 两
组 P M 机构 对拉 布置 形式 ( 图 1 。 A 见 )
击 , 高 了驾 驶 员 操 作 舒 适 性 。 提
关键词 : 座椅 ; 气动人 工肌 肉; 智能控 制 ;P神经 网络 ; B 减振
中 图 分 类 号 :B 3 T 55 文献标志码 : A
履 带式 工程 车辆 作业 环境 恶劣 , 统 座椅 缓 冲 传 减振 器其 减振 效果 有 限 , 驶 员会 受 到剧 烈 的振 动 驾
尼( ) , 时下部 两个 P M 机 构则 放气 伸 长 。图 拉 力 此 A 1b 又为 向上时 , 部两 个 P M 机 构 充气 收缩 , () 下 A 产 生阻尼 ( ) , 拉 力 而上部两个 P M则 放气伸 长。 A
1 2 P M 力学特 性 . A
[ { () +[ ] zt }+[ ] () M] t } c {() K { t }= { () F t}
文章 编 号 :6 3—2 5 (0 1 0 0 0 0 17 0 7 2 1 )3— 2 7— 5
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
其在 锻 压 设 备 中 的 应 用 [ J ] . 机 床与液压 , 2 0 1 0 , 3 8 ,
( 河南科技大学 机 电工程学院 , 河南 洛阳
4 7 1 0 0 3 )
r;
摘
要: 为 了解决船舰 等 工程领 域 高精 仪 器的减振 问题 , 提 出了具有 弹性 阻尼和 变 刚度特 性 的并联 减振
系统 , 实现 了减振 系统 刚度 的有效调 节和控 制 。通过 系统运 动 学和 动 力 学分析 , 结 合 气动肌 肉数 学模 型 , 建 立 了并联减振 系统的数 学模 型 ; 利用 A d a m s 软 件 进行 仿 真 , 分析 了脉 冲激励 下刚 度等 系统特 性 参数 对 并 联
Po we r Sy s t e m S o c i e t y, 2 00 2, 1 07 — 1 1 .
பைடு நூலகம்
颜 昌文 , 王炜 , 谈宏华 . 电液 比例控制技 术在工程 船舶 中 的应用 [ J ] . 液压与气 动 , 2 0 0 8 , ( 8 ) : 4 8— 5 1 .
蒙争争. 电液 比例 控 制 技 术 在 快 速 深 拉 伸 液 压 机 中的 应
一
中图分类号 : T H 1 3 8 文献 标志码 : B 文章 编号 : 1 0 0 0 - 4 8 5 8 ( 2 0 1 3 ) 1 1 - 0 0 5 2 - 0 5
引 言
运 动机构 由若 干个并 行 的运 动铰链 控制 称为并 联 机 构 。即 由多个 运 动链 的一端 同时与 一个具 有多个 自 由度 的终 端 操 作 器 连 接 构 成 … 。将 并 联 机 构 引 人 减
导师 , 博士 , 主要从事并联机构动力学及其控 制、 振动理论 与隔
振技术研究。
构 成封 闭容腔 , 由于 该 容 腔体 积 较 大及 胶 管 的较 高 塑 性, 致使 系统压 力 5 MP a 时该 阀出油 口压 力经 过 2 . 2 s
基 本上 达到稳 定 。
参考文献 :
5 2
DO I : 1 0 . 1 1 8 3 2 / j . i s s n . 1 0 0 0 — 4 8 5 8 . 2 0 1 3 . 1 1 . 0 1 4
液 压 与 气动
2 0 1 3年 第 1 1 期
基 于气 动 人 工 肌 肉变 刚 度 并 联 减 振 系 统 模 型 及 特 性 研 究
v a l v e [ P ] . U S P a t e n t : U S 4 5 6 9 2 7 3 , F e b . , 1 9 8 6 . 李小龙 , 夏琴香 , 周思聪 , 等. 电液 比例 控 制 技 术 和 策 略 及
[ 1 ] B u r r o w s C R . S o me C h a l l e n g e s F a c i n g F l u i d P o w e r T e e h n o l o —
振领 域为 多维减 振带 来 了新 的理 念和 突破 。本研究 介 绍 了并联 结构应 用 于 多 维 减 振 系 统 主 体 机 构 的 新 方
收 稿 日期 : 2 0 1 3 - 0 4 - 2 2
基金项 目: 河南省教育厅重点项 目( 1 3 A 4 6 0 2 3 7 )
作者简介 : 刘延 斌 ( 1 9 7 1 一 ) , 男, 河 南洛 阳人 , 教授 , 硕 士 生
Vi b r a t i o n S y s t e m Ba s e d o n P n e u ma t i c Ar t i ic f i a l Mu s c l e
L I U Ya n— b i n,LI Z hi ・ s o n g,DI F u— y a n
减振 系统 的影响 ; 搭建 了实验 平 台 , 进行 了实验数 据 与仿 真数 据 的对 比分析 , 证 明 了减 振 系统 数 学模 型 的正
确性 和 变刚度减振 原理 的 可行 性 , 也为主 动 变刚度减振 技 术研 究奠定 了基础 。 关 键词 : 气动 人 工肌 肉 ; 并联机 构 ; 变刚度 ; 多维 减振
( 1 1 ) : 1 1 9—1 2 6 .
t o d a t e [ A] . P r o c e e d i n g s o f t h e 5 J F P S i n t e r n a t i o n a l s y m p o — s i u m o n l f u i d p o w e r [ C] . T o k y o , J a p a n : T h e J a p a n F l u i d
刘延斌 , 李 志松 , 底复奥
T h e Mo d e l a n d Ch a r a c t e r i s t i c s Re s e a r c h o f Va r i a b l e S t i f f n e s s P a r a l l e l
D o n a l d A . S l e v e n p l p e r , A l d e n , N. Y. P r o p o t r i o n a l V a l v e [ P ] .
US Pa t e nt : US 3 5 9 96 75, Aug ., 1 9 71 . Ge r a l d C.And e r s o n, Oe o n s mo wo e .Th r e e — wa y pr o po ti r o n a l