第二讲 航空制造中的大尺寸测量
飞机装配中大尺寸测量场的建立与优化技术研究
飞机装配中大尺寸测量场的建立与优化技术研究摘要:本文分析了面向飞机装配的大尺寸测量场的组成要素与构建价值,在此基础上,从装配坐标系的建立、激光跟踪仪转站原理、参数定义、算法几方面入手,着重阐述了激光跟踪仪转站这一大尺寸测量场的构建优化技术。
关键词:飞机装配;大尺寸测量场;激光跟踪仪转站引言:在实际的飞机装配过程中,想要完成飞机部件上所有关键特征量的测量,就必须要确保复数的激光跟踪仪同时运行。
在激光跟踪仪转站技术的支持下,可以完成大尺寸测量场的建立,并保证其覆盖整个飞机装配空间。
依托大尺寸测量场,能够实现飞机部件之间的定位、装配与对接,在落实飞机装配中有着极高的构建与优化价值。
一、飞机装配中大尺寸测量场的构建分析(一)大尺寸测量场的组成要素大尺寸测量场主要包含数字化测量设备、数字化定位设备、飞机部件以及多种装配工装等等,而这些设备与工装均具备其独特的坐标系。
当前,普遍将这些坐标系划分为四种类型,即部件坐标系、装配坐标系、设备坐标系、测量坐标系[1]。
其中,部件坐标系主要指飞机装配部件的位置;装配坐标系主要指存在与整个装配空间内部的基准坐标系;设备坐标系主要指存在于装配现场中的设备、工装位置,包括机床、机器人、定位设备等等;测量坐标系主要指飞机装配时各个激光跟踪仪的坐标系。
对于存在于飞机装配现场内的多个激光跟踪仪而言,其位置可以根据工况与需求的不同进行调整。
此时,若是某一激光跟踪仪的位置发生变化,则测量坐标系相对于装配坐标系更为独立。
实践中,笔者提前在飞机装配现场的地面(装配平台也可以)上设置在增强的系统参考点,以此维护激光跟踪仪测量坐标系与装配坐标系之间的相对关系。
(二)大尺寸测量场的重要作用1.推动飞机装配系统数字化、集成化面向飞机装配的数字化系统中,不同的设备具有独自的坐标系。
此时,若是不设定一个统一的坐标系基准,则会导致各个设备之间的姿态、位置难以有效关联,最终造成不同设备无法协同工作。
而通过建立大尺寸测量场就能够避免上述问题的发生,可以确保所有设备均在装配坐标系内完成定位,构建起不同设备之间的相对运动关系与相对几何关系,最终实现飞机系统的数字化与集成化,并达成协同运行的目标。
精密测量技术 第二章 长度尺寸测量讲解

目前,在实际工作中常使用下述两种实物 基准:量块和线纹尺。首先由稳定激光的基 准波长传递到基准线纹尺和一等量块,然后 再由它们逐次传递到工件,以确保量值准确 一致。
§2-1 长度基准和米定义
二、量块的检定
1、量块的测量面平面度的检定
§2-2 量块的检定
用平晶以技术光波干涉法检定
平面度允许偏差小于0.15微米的,应采用一级平晶;平面度 允许偏差大于等于0.15微米的,可采用二级平晶。因此,对 尺寸≤150mm的2等或0级量块,规定用1级平晶检定,其它 量块可用2级平晶进行检定。
干涉条纹的弯曲度
§2- 4 轴类零件的测量
2、非接触式测量
D 31.53 1 d
光圈直径 被测直径mm
图2-12
§2- 5 孔类零件的测量
一、接触法测量孔径
1 、用光学灵敏杠杆测量孔径
D n1 n2 d测头
§2- 5 孔类零件的测量
2 、用孔径测量仪测量孔径
D d h
§2- 5 孔类零件的测量
(1)一点接触测量 (2)两点接触测量 用卡尺、千分尺、各种指示量仪等测量轴径都是二点接触。
§2- 4 轴类零件的测量
D 2R 2 OB OE
图2-9 a
OE R OB R2 C 2
D 2R
1
C R
2 2
1
C2 1 R2
C2 1 2R2
(2)相对测量法
将被测量块与精度等级比它高一等的标准量块,在规定测量 精度的仪器上进行比较,求出被测量块的方法。相对测量最 高能检定2等量块。 多用立式干涉仪
大尺寸测量.

谢谢
激光扫描测量系统
激光扫描测量系统
关于动车车头的测量
对于动车的车头,我们可以根据所需要得到的被测量和实际测量环境 选取不同的测量系统。 例如,需要接触测量的可以选取关节臂测量机,需要非接触测量的可 以选取全站仪等。 在实际测量中基于对精度和成本的考虑,还需要做进一步的产品比对, 选出合适的测量仪器。 欢迎感兴趣的同学下课后一起交流~
关节式坐标测量机
关节臂测量机
关节臂测量机
数字摄影系统是通过在不同的位置和方向获取同 一物体的2幅以上的数字图像,经计算机图像匹 配等处理及相关数学计算后得到待测点精确的三 维坐标。 此类系统与其它类系统一样具有精度高、非接触 测量和便携等特点。此外,还具有其它系统所无 法比拟的优点:测量现场工作量小、快速、高效 和不易受温度变化、振动等外界因素的干跟踪测量系统
采用其它非干涉法测距方式来实现距离的测量,将这类系统称为激 光扫描测量系统。 激光扫描仪的测距原理分为三种:一是脉冲法激光测距,二是激光 相位法测距,三是激光三角法测距。 基于脉冲法测距的激光扫描仪测程较长故其主要应用在土木工程测 量、文物和建筑物的三维测绘等领域。 相位法测距的精度和调制频率有关。 基于激光三角法测距原理的扫描测量系统又称结构光扫描仪以半导 体激光器作光源,使其产生的光束照射被测表面,经表面散射(或 反射)后,用面阵CCD摄像机接收,光点在CCD像平面上的位置将反 映出表面在法线方向上的变化,即点结构光测量原理。
大尺寸测量
1-606
——动车车头测量
可以实现大尺寸测量的方法和系统按照所使用的主要传感 器可以分为以下八大类:
• 三坐标测量机; • 数字摄影三坐标测量系统; • 经纬仪测量系统; • 全站仪测量系统; • 激光跟踪测量系统; • 激光扫描测量系统; • 关节臂测量机; • 室内GPS。
大尺寸精密测量技术及其应用分析
大尺寸精密测量技术及其应用分析摘要:伴随着数字化技术的不断发展,测量技术逐渐从以往的简单测量技术转变为多元化的数字化调查、分析和预测性技术,数字化测量技术是当代地理信息自动化、现代化、实时化的直接表现。
在各类型工程测量当中,大尺度精密测量技术的合理应用不仅可以提升测量工作的整体工作效率,还可以显著控制测量工作的人力资源投入程度,对于降低经济成本和提升人力投入使用价值有着明显的推动作用。
对此,本文详细分析大尺度精密测量技术及其应用。
关键词:大尺度;精密测量技术;应用引言伴随着我国科学技术不断发展,高精度的大型工业也处于快速发展阶段,尤其是在机械制造、船舶制造、航天航空制造等领域当中,其成品的尺寸也在不断的提高,同时复杂性也在不断增加,自动化的生产能力也显得越发重要,这也就需要对各种大型工业产品在制造过程中给予较高的精确度,甚至对于一些要求更为苛刻的产品必须给予动态性的质量检测。
大尺度精密测量技术主要是给予高效率、高精确程度的数字化测量系统为基础,例如激光跟踪仪、室内GPS等,再借助不同的数字化测量系统的测量原理、测量方式以及测量范围等,实现大幅度提升测量精准度以及测量效率的效果。
对此,探讨大尺寸精密测量技术及其应用具备显著意义。
1.大尺度精密测量技术大尺度精密测量技术在工程测量当中的应用的关键性技术相当多,但是无论是怎样的技术,其都是基于数字化测量系统为基础的。
目前,在工业领域当中能够普及使用的大尺度精密测量技术,主要有关节测量臂、三坐标测量机、激光跟踪仪、室内GPS、数字化摄影测量技术以及激光雷达等技术。
在上述的集中大尺度精密测量技术当中,三坐标测量机的测量优势在于精度高、通用性高以及效率高,缺陷在于便携性较弱,测量范围会因为工作台的大小而遭受限制;关节测量臂的测量优势在于便携性较好,自由程度较大,缺陷在于自动化程度较差,测量效率比较低;激光跟踪仪优势在于动态性能较好,测量范围广,便携性较好,缺陷在于单台使用时角度误差比较大,价格较为昂贵;室内GPS的测量优势在于全方位的测量忒单较好,缺陷在于需要多个基站配合使用,经济价格比较高;激光雷达的优势在于测量精度较高,分辨率比较好,但是缺陷在于预热时间比较长,测量的成本比较高;数字化摄影测量工作环境比较低,测量效率比较高,但是缺陷在于误差源比较多。
大尺寸测量检测设计方案
大尺寸测量检测设计方案设计方案案例本方案为某轨道交通行业工艺研究所,大零部件尺寸测量检测,基于接触式测量及精密机械技术。
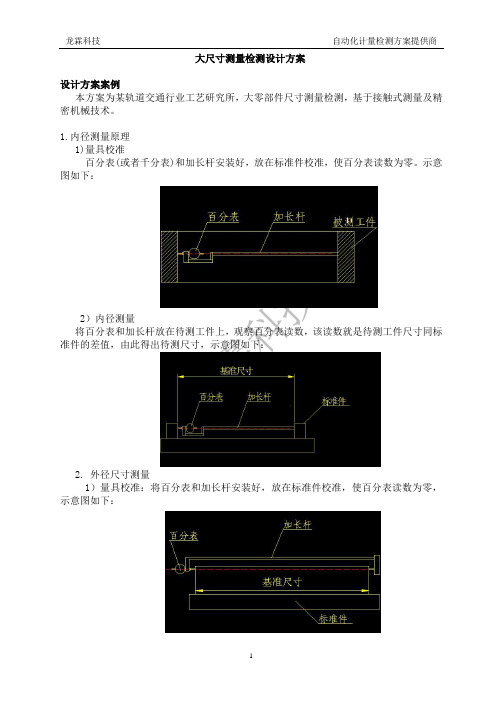
1.内径测量原理1)量具校准百分表(或者千分表)和加长杆安装好,放在标准件校准,使百分表读数为零。
示意图如下:2)内径测量将百分表和加长杆放在待测工件上,观察百分表读数,该读数就是待测工件尺寸同标准件的差值,由此得出待测尺寸,示意图如下:2. 外径尺寸测量1)量具校准:将百分表和加长杆安装好,放在标准件校准,使百分表读数为零,示意图如下:2)外径尺寸测将百分表和加长杆放在待测工件上,观察百分表读数,该读数就是待测工件尺寸同标准件的差值,待测尺寸由此测得,示意图如下:3. 测量技术原理:大尺寸精密检测是机械行业的难题,我们采用一个经过精密校准的基准尺寸(标准件或量块)同待测尺寸比较。
用百分表和加长杆测量待测尺寸,当待测尺寸同基准值差值为零时,则待测尺寸等于基准值,从而精密地测出了待测尺寸。
如待测尺寸同基准值差值不为零,该差值就是待测尺寸实际偏差。
此方案的优点:1)高精度,例如2000mm的尺寸,可以达到±0.01mm2)可以长时间保持高精度龙霖公司简介龙霖科技有限公司是一家工业产品快速自动化检测、光电检测及图像影像测量解决方案提供商。
公司总成光、机、电、计算机一体化等多种复合测量检测技术,业务范围涉及:自动化检测设备及项目研发,光电检测设备及项目研发,机器视觉系统集成及项目研发,专用三维测量设备开发,自动化及机电一体化设备及项目研发,高精度计量、检测设备及工具设计与制造等等。
应用领域遍及轨道交通、军工、航空航天、重工船舶、汽车制造、机床模具、加工设备等装备制造业。
龙霖科技以强大技术优势引领中国自动化检测设备,测量仪器和专用测量设备的高端市场,研发技术支持来源于资深行业专家及高级工程师、国内的大学和研究所设计院。
我们拥有自己在自动化技术和光电学技术领域整合能力,完善的工业检测解决方案设计能力及快速检测能力。
飞行器制造中的精密测量技术

飞行器制造中的精密测量技术在现代航空航天领域,飞行器的制造是一项极其复杂且高精度的工程。
而精密测量技术在其中扮演着至关重要的角色,它就像是一双“慧眼”,能够精确地捕捉和评估飞行器各个零部件的几何形状、尺寸、位置以及物理特性等关键参数,确保飞行器的性能、安全性和可靠性达到设计要求。
精密测量技术的重要性不言而喻。
在飞行器的设计阶段,需要通过测量获取大量的数据,以验证设计的合理性和可行性。
在制造过程中,对零部件的加工精度进行实时监测和控制,能够及时发现并纠正偏差,避免不合格产品的产生。
在装配环节,精确的测量能够保证各个部件之间的配合精度,从而提高飞行器的整体性能。
而在飞行器的维护和维修中,测量技术则可以帮助检测出零部件的磨损、变形等问题,为维修方案的制定提供依据。
在飞行器制造中,常见的精密测量技术包括坐标测量技术、光学测量技术、激光测量技术以及无损检测技术等。
坐标测量技术是一种应用广泛的测量方法,其中三坐标测量机是最为典型的代表。
三坐标测量机通过测量探头在三个相互垂直的方向上的移动,来获取被测物体表面点的坐标值。
它具有高精度、高稳定性和通用性强等优点,能够测量各种形状复杂的零部件。
然而,三坐标测量机也存在一些局限性,例如测量速度相对较慢,对于大型零部件的测量可能需要较长的时间。
光学测量技术在飞行器制造中也发挥着重要作用。
其中,机器视觉测量技术利用摄像机获取被测物体的图像,通过图像处理和分析算法来提取尺寸、形状等信息。
这种技术具有非接触、测量速度快、自动化程度高等优点,适用于在线检测和批量生产中的快速测量。
另外,干涉测量技术则基于光的干涉原理,能够实现高精度的平面度、粗糙度等测量,在光学元件和精密表面的测量中具有独特的优势。
激光测量技术因其高精度和非接触性的特点,在飞行器制造中得到了越来越多的应用。
激光跟踪仪可以实时跟踪测量反射靶标的位置,从而实现对大型零部件的空间尺寸测量。
激光扫描测量技术则能够快速获取物体表面的三维点云数据,用于构建数字化模型和进行逆向工程。
productpic_现代大尺寸空间测量方法
新视点NEW VIEWPOINT航空制造技术2006年第10期68近十几年来,由于激光、半导体、自动控制、计算机、精密制造及计量技术的迅速发展,在传统的三坐标测量基础上,又发展了其他多种现代大尺寸空间测量方式,各有所长。
目前,在大尺寸空间测量方面,可归纳为5种主要系统:三坐标测量机、手持(便携式测量系统、可变焦数字照相测量系统、激光空间跟踪测量仪和基于GPS 原理的空间测量系统。
三坐标测量机是60年代发展起机械制造是国民经济发展的基础,计量测试则是机械制造发展的先决条件之一。
在大型机械装备的制造及装配过程中,大型工件的几何尺寸和形位误差的测量,是保证整套设备质量的关键因素。
因此,大尺寸空间测量是现代大型机械制造业中亟待解决的关键技术之一,它涉及航空航天、冶金设备、造船工业、汽车制造、港口机械、探矿设备、电站设备、造纸印刷等诸多工业领域来的一种三维空间测量技术,经过几十年的发展,其技术已经相当成熟。
它作为一种高精度、高效率的大型测量仪器,已在制造领域得到广泛应用。
由于三坐标测量机的机械结构是三维正交的,受其结构的限制,不可能使测量范围任意扩大。
根据目前的加工能力、制造成本以及测量精度要求的限制,测量机的测量范围一般小于8000mm ×4000mm ×3000mm,极个别的测量范围可以达到12000mm×6000mm ×5000mm,这种测量机的造价极为昂贵。
为了拓展空间测量范围,就必须发展非正交式的机械结构。
随着制造技术水平的提高,要保证生产过程的质量,就必须考虑成本和效率。
其中,洛克希德・马丁公司为了提高对JSF的检测能力,对零件及配件采用Metronor 公司生产的一种便携式测量系统。
以前在测量大型零件时,都需将工件运到测量机所在的具有严格控温的房间内,测量不仅费时费工,而且效率很低。
而手持式三维测量仪成本仅是坐标测量机的1/4,且不需搬动大型工件。
手持式三维测量仪的工作原理是:用红外线敏感的数码相机观察手持光笔上的发光二极管。
第七节 大尺寸测量
2.用测长机测量 测长机是机械制造中测量大尺寸的精密仪器。 测长机是机械制造中测量大尺寸的精密仪器。 按其测量范围来分, 6m, 按其测量范围来分,有1、2、3、4、6m,甚至还 12m的 该仪器的使用主要采用绝对测量法, 有12m的。该仪器的使用主要采用绝对测量法,特 别是大尺寸量具的校准工作, 别是大尺寸量具的校准工作,但也可以采用比较 测量法。 测量法。 绝对测量是将被测工件与仪器本身的刻度尺 绝对测量是将被测工件与仪器本身的刻度尺 进行比较. 进行比较. 比较测量则是将被测工件和一个预先用来对 比较测量则是将被测工件和一个预先用来对 准仪器零位的标准件(如量块等)相比较,从仪 准仪器零位的标准件(如量块等)相比较, 器上读取两者之差值。 器上读取两者之差值。
[
]
D-被测直径的基本尺寸; d-定位圆柱直径;
被测直径对于基本尺寸的偏差值为:
l2 ∆D = −( 2 − 1) ∆H H
ΔH-带正负号的测微计读数值。
这类方法测量精度不高。
3.围绕法
图2-43 ,图b所示为金属带尺两端附有角铁,以便 拉紧带尺。 带尺的厚度不用考虑,因为它并未计入带尺长度的 测量结果。
k = ∫ ∆fdt = ∫
0 0 t t
2ν f1dt c
由于:
c = λf1
则:
ν = dL / dt
t
故被测长度为
k=∫
0
2
λ
dL =
2L
λ
L = k
2
λ
三、大尺寸的间接测量 、
1.辅助基面法 图2-40为以机床的床面 为基面,对大尺寸工件的外 径进行测量的示意图。
d D = 2(a + − b) 2( 2
Δl和Δl1互相补偿,因此测量误差ΔL为:
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
P• oFinintdCompri*putation:
•
Minimize
∑ε 2 in n
r pik
=
f
(mr ki , µrk )
r m
=
(l,θ
,φ
)
1
r p
∗
εθ
εl
3 1
2
ቤተ መጻሕፍቲ ባይዱ
Instrument Transform Computation:
Bx
T World k
=
0
R(γ , β ,α) 0
2014/4/9
第二讲 航空制造中的大尺寸测量技术
刘志刚
预备知识一:坐标变换
假设全局坐标系为{W}和传感器坐标系为{S},传感器坐标系 相对于全局坐标系的关系由旋转矩阵R和平移矩阵T来确定
Pi=RQi+T
式中Pi是全局坐标系下的空间点的坐标值,Qi是传感器坐 标系同一组空间点的测量坐标值。
对于空间共同一组空间点,在两个坐标系下具有相 同的质心。分离平移适量T,先求解旋转矩阵R。两组数 据Pi和Qi的质心坐标
多种组合式测量装置
1.测头位置M位 于两特征点所在 的直线上。
2.而且一旦其中 一个特征点坐标 由于遮挡测不到, 将无法测量
1.只要距离值d特 征点的位置可以 随意给定。
2.而且一旦其中 一个特征点坐标 由于遮挡测不到, 将无法测量
三个以上特征点的冗余性结构设计
三测量点组合
7
2014/4/9
n手持测头冗余性结构设计
• Measure the points from the third instrument location.
多站式激光跟踪仪三维测量网络布局
• Measure the points from the fourth instrument location.
天津空客飞机总装厂的建设
Solve for Instrument Transformations
研制了多种具有特殊几何形状的光电传 感器,实现空间角度—时间的转换
差分式光电位置传感器 便携式三坐标测头
3600全向接收传感器 单片机多路控制器
n关键技术—发射机网络激光扫描信号识别技术
a. 发射机特征频率识别 在空间测量网络中,发射机之间各自旋转频率不同,即每台发射机都
有其特征频率,因此可通过发射机特征时间的频率匹配技术,识别其特征 频率从而对识别发射机。 b. 特征信号识别
• 3点以上特征点的冗余性结构设计
– 利用距离公式组成超定方程组
( (
x x
− −
x1 ) 2 x2 )2
+ +
(y (y
− −
y1 ) 2 y2 )2
M
+ (z − z1 )2 = d12
+
(z
−
z2 )2
=
d
2 2
(x
−
xn )2
+
(y
−
yn )2
+
(z
−
zn )2
=
d
2 n
位姿测量时,将若干个光电传感器固定在被测目标表面,测量每个光电传 感器其坐标值,从而计算出被测目标的位姿信息。
基于iGPS的组合型测头的测量原理
• 组合型测头必要性
– 平面型传感器,测量的是圆形点坐标,零件表面尺寸无法测量
• 组合型测量思想
– 利用多个传感器之间的相互约束关系进行组合测量
两测量点组合
X坐标精密度
0.06
0.04
0.02 0 1 101 201 301 401 501 601 701 801 测量点/N
Z坐标精密度
0.05 0.04 0.03
0.02 0.01
0
1
101 201 301 401 501 601 701 801 测量点/N
系统合成定位精密 度/ mm
系统定位精密度/mm
di (i = 1, 2,K, n)
为各测量点其到测头的距离, 通过标定求得
(xi , yi , zi )
组合式大尺寸测量
• Many instrument types and models in use.
• Each manufacturer has individual, incompatible, software applications.
• Users need to apply several devices to a single measurement task.
• 通过增加发射机网络规模,扩大测量范围。发射机网络一经标定就可以重复使用, 无需重新标定。
• 移动空间定位系统可构建出:便携式大尺寸坐标测量系统、汽车、飞机等行业大 型构件装配的位姿实时在线测量系统、自动化生产线中工业机器人末端姿态测量 系统、自动导航小车AGV或自主机器人导航系统、人体运动轨迹跟踪系统等等。
测量设备
Theodolites & Total Stations
Portable CMMs
Digital Photogrammetry Laser Trackers
Digital Levels
Laser Scanners
激光跟踪仪(Laser Tracker)
激光跟踪仪测量原理
激光跟踪仪在航空制造中的应用
• Operators need to retrain on each software package.
Need: General Software
Common User Interface Unify Metrology Processes
Combined Results
Software A
Software B
Y坐标精密度
0.04 0.03 0.02 0.01
0 1
101 201 301 401 501 601 701 801 测量点/N
合成测量精密度
0.06
0.04
0.02 0 1 101 201 301 401 501 601 701 801 测量点/N
长度误差 /mm 长度误 差/mm
n现场标定算法实验验证
X向标定误差
Y向标定误差
标准差/mm
X向误差 0.0116
Y向误差 0.0212
Z向标定误差
Z向误差 0.0172
合成误差 0.0296
系统定位精密度/mm
单点测量精密度(连续测量同一空间点,求标准差)
标准差/mm
X向精/σx 0.014
Y向精度/σy 0.008
Z向精密/σz 0.013
合成精密度 0.021
5
2014/4/9
n 局域空间定位系统构成
传
感 器
碳 纤
维
杆
测量系统主要构成
l 发射机网络:每台发射机发射两个 扇形光平面和一个回转基准脉冲。发 射机绕转轴高速旋转,使两个扇形光 平面对整个测量空间进行扫描。
l 发射网络基准时间的无线传输
l 光电传感器与数据采集计算
l 发射器内外参数标定装置
n 关键技术-光电传感器技术
光电传感器
光电传感器
用于内参数标定的标定台
用于外参数标定的标定杆
6
2014/4/9
n 局域空间定位试验测量系统的研制
第一代局域空间定位系统
第三代局域空间定位系统
第二代局域空间定位系统
研制的发射机网络测量定位系统,实现了 空间三维定位与物体空间位姿测量。
n 测量系统精度验证
p测量距离:5m p测量点数:30 p测量范围:600mm×380mm
设各传感器之间互不相关,以变量的伪随机抽样获得服从三个传感器
单元概率分布的随机数,注入到测量真值中,再根据测量模型产生可能
的结果分布ξ。 循环上述步骤m次,得到m个样本(ξ1,ξ2,,…,ξm),对样本进行统计
就得到不确定度参数(Ux,Uy,Uz)T.
2
2014/4/9
多站式激光跟踪仪三维测量网络布局
将分离出来的发射机特征频率数据以参考信号作为基准,对相应的发 射机激光平面进行空间角度匹配,实现将激光平面的特征时间分离出来。
不同类型发射机混频信号分离
n关键技术—特征角度计算
A. 时域光电信号峰值精密提取方法 首先降低信号采用频率、粗测峰
值位置,然后通过曲线拟合方式精 确提取峰值时间方法。
传感器光电信号的零相位滤波
C飞AD机环装境配下中装的配大、尺测寸量测的量实时可视化
装配中各部件外形靠型架保 证,对接好的全机各部件相 对位置,特别是影响飞机气 动特性的参数(如机翼安装 角、后掠角、上反角等)和 飞机的对称性,要通过激光 跟踪仪测量来检测。
在各部件上都有一些打上标记 的特征点,在整架飞机对接好后, 用激光跟踪仪测出它们的相对位置, 经过换算即可得到实际参数值。
0.28 0.42
现场标定标定杆长度误差
11
21
31
41
51
61
测量次数/N
系统定位精密度/mm
n 局域空间系统的主要特点
• 在测量区域内,定位与坐标测量任务不受限制,能够实现多目标实时在线并行测 量;
• 现场测量区域不受限制,可以根据测量现场具体特点,确定发射机的数量与分布, 通过现场标定技术,快速构件现场空间定位与坐标测量系统;
标准差 /mm 扩展不确定度
U95 /mm U99 /mm
捆绑表定标杆长度误差 0.123
0.246 0.369
0.3 0.25 0.2 0.15 0.1 0.05
0 1
捆绑标定标定杆长度误差
11 21 31 41 51 61 71 测量次数/N