机器视觉所用的光学知识
机器视觉及光学检测基础知识与应用

光学检测基础及选型Sam cheung 2010-06-28PDF 文件使用 "pdfFactory Pro" 试用版本创建 何为机器视觉?机器视觉是一门技术,该技术被广泛应用在生产 制造等行业。
可用来保证产品质量、控制生产 流程、感知环境等。
机器视觉系统是基于机器视觉技术为机器或自动 化生产线建立的一套视觉系统。
PDF 文件使用 "pdfFactory Pro" 试用版本创建 1、相机的分类n nn1、按照芯片类型: 1)、 CCD(Charge Coupled Device 电 荷耦合装置) 2)、CMOS(Complementary Metal Oxide Semiconductor 互补金属氧化物半导 体)PDF 文件使用 "pdfFactory Pro" 试用版本创建 CCD与COMS的区别PDF 文件使用 "pdfFactory Pro" 试用版本创建 CCD Sensor—Frame Transfer Sensor解决了Full Frame Array Sensor发生 Smear现象的问题 从感光部分转移到屏蔽存储区域的时 间约为500us 优点:在曝光时间较长的情况下, Smear现象比Full Frame Array Sensor小很多 缺点:由于需要两个Sensor,因此 成本非常高Light sensitive CCD-sensorShielded memory area...............................Readout registerPDF 文件使用 "pdfFactory Pro" 试用版本创建 CCD Sensor—Interline Transfer Sensors转移时间约为1us,因此完全不 存在Smear现象。
优点:由于转移时间非常短,因 此不需要使用机械快门或闪光灯 缺点:由于屏蔽区占用了Sensor 的部分面积,因此使得此种传感 器填充因子只能在20%~70% 添加微镜头可以增加填充因子Sensor elements Shielded (Photo diodes) vertical shift registerOutput (Amplifier) Horizontal shift registersPDF 文件使用 "pdfFactory Pro" 试用版本创建 CMOS SensorPDF 文件使用 "pdfFactory Pro" 试用版本创建 由于CMOS可直接访问 单个像素, 因此在AOI非常小的情 况下,CMOS 与CCD相比,帧率上有 较大的优势。
机器视觉光源系统入门知识详解
上海嘉肯光电科技有限公司:机器视觉光源的研发
机器视觉光源系统入门知识详解
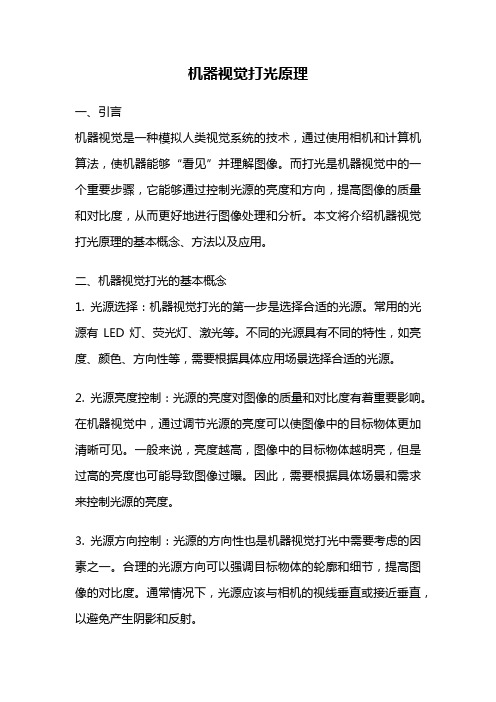
机器视觉优势:机器视觉系统具有高效率、高度自动化的特点,可以实现很高的分辨率精度与速度。
机器视觉系统与被检测对象无接触,安全可靠。
人工检测与机器视觉自动检测的主要区别有:
光源---光路原理
照相机并不能看见物体,而是看见从物体表面反射过来的光。
镜面反射:平滑表面以对顶角反射光线
漫射反射:粗糙表面会从各个方向漫射光线
发散反射:多数表面既有纹理,又有平滑表面,会对光线进行发散反射
上海嘉肯光电科技有限公司:机器视觉光源的研发 光源---作用和要求
在机器视觉中的作用
照亮目标,提高亮度
形成有利于图像处理的效果
克服环境光照影响,保证图像稳定性
用作测量的工具或参照
良好的光场设计要求
对比度明显,目标与背景的边界清晰
背景尽量淡化而且均匀,不干扰图像处理
与颜色有关的还需要颜色真实,亮度适中,不过曝或欠曝
光源---光场构造
明场:光线反射进入照相机
暗场:光线反射离开照相机
上海嘉肯光电科技有限公司是一家专业从事机器视觉光源的研发、生产和销售为一体的高新技术企业。
以工业检测、机器视觉、图像处理、科学研究等领域为主要研发及经营方向。
此外,公司还代理工业镜头、工业相机、图像采集卡、图像处理软件和各类视觉附件。
??上海嘉肯光电科技有限公司?将坚持“用心,创造未来”的企业经营理念,并持续不断地把最优秀、性价比最高的视觉产品提供给广大用户,以不断满足客户日益增长的要求。
机器视觉光学系统概论

T H′
远摄物镜系统
远摄透镜设计实例:
远摄物镜:T=95, f =156, η=0.61
工作距(后焦距:Back focal length)和反远 摄物镜
从系统最后一面到后焦面的距离fb又称工作距(后焦 距),通常要比焦距短(fb < f)。
对于一些短焦距镜头,工作距可能过短,以至于无法 设置光阑。有的彩色CCD前常有分光棱镜,也需要足 够的空间。
77°/8
2.8
6.11
2.6
场物镜
4.焦距,物、像距,远摄型和反远摄型镜头, 成像光学系统的基本参数(II)
孔径光阑
物距 l
像距 l′
成像透镜
共轭距 L
透镜成像示意图
物距l 、像距l′分别是物镜到物面、像面的距离; 共轭距(物像距)L则是物、像面的间距;
当l =∞时,共轭距L =∞,像距 l′=焦距f 。
7.48×6.15
8.3×8.3
782×582
SVGA color CCD
SONY
ICX-415AQ
1/2″
Yes, HAD
<50 fps
7.48×6.15
8.3×8.3
782×582
XGA b/w XGA color
CCD CCD
SONY SONY
ICX-204AL
1/3″
ICX-204AK
1/3″
设想用镜头来观察一组空间频率逐渐变大的 “分辩率板”。
任何品质的镜头,对于全黑或全白的零频总是能够响应的,定 义零频的MTF=1。 对于空频较低的分辩率板,一般的镜头也能分清,MTF较高。 频率较高,响应就越差,MTF较低。 当频率高到线条几乎无法分辩时,就达到最高分辨率,简称截
机器视觉打光原理
机器视觉打光原理一、引言机器视觉是一种模拟人类视觉系统的技术,通过使用相机和计算机算法,使机器能够“看见”并理解图像。
而打光是机器视觉中的一个重要步骤,它能够通过控制光源的亮度和方向,提高图像的质量和对比度,从而更好地进行图像处理和分析。
本文将介绍机器视觉打光原理的基本概念、方法以及应用。
二、机器视觉打光的基本概念1. 光源选择:机器视觉打光的第一步是选择合适的光源。
常用的光源有LED灯、荧光灯、激光等。
不同的光源具有不同的特性,如亮度、颜色、方向性等,需要根据具体应用场景选择合适的光源。
2. 光源亮度控制:光源的亮度对图像的质量和对比度有着重要影响。
在机器视觉中,通过调节光源的亮度可以使图像中的目标物体更加清晰可见。
一般来说,亮度越高,图像中的目标物体越明亮,但是过高的亮度也可能导致图像过曝。
因此,需要根据具体场景和需求来控制光源的亮度。
3. 光源方向控制:光源的方向性也是机器视觉打光中需要考虑的因素之一。
合理的光源方向可以强调目标物体的轮廓和细节,提高图像的对比度。
通常情况下,光源应该与相机的视线垂直或接近垂直,以避免产生阴影和反射。
三、机器视觉打光的方法1. 平面光源:平面光源是一种常用的机器视觉打光方法,它能够提供均匀的光照,并减少阴影的产生。
平面光源一般由多个光源组成,光源之间的距离和位置需要根据具体需求来确定。
通过调节光源的亮度和方向,可以使目标物体在图像中呈现均匀明亮的效果。
2. 斜面光源:斜面光源是一种通过调节光源方向来强调目标物体轮廓和细节的打光方法。
斜面光源将光线从一个方向斜射到目标物体上,通过产生明暗交替的效果,使目标物体的边缘更加清晰可见。
这种打光方法常用于检测目标物体的表面缺陷和凹凸不平。
3. 透射光源:透射光源是一种通过透射光线来打光的方法。
它可以通过透明或半透明的材料将光线引导到目标物体上,从而提高图像的对比度和清晰度。
透射光源常用于表面光洁度检测、透明物体检测等应用场景。
机器视觉光学技术与应用.ppt
与传统光源相比,LED光源具有功率密度高,能耗低, 长寿命,电光响应快,光谱单色性好等突出优点。是机器 视觉专用光源的发展方向。
LUSTER LightVision
一、机器视觉系统概论
1.机器视觉系统构成
概念:
“机器视觉就是用机器代替人眼来做测量和判断。 ” “机器视觉是通过光学的装置和非接触的传感器自动地接收
和处理一个真实物体的图像,以获得所需信息或用于控 制机器人运动的装置”。——SME 和RIA
LUSTER LightVision
机器视觉系统的特点是提高生产的柔性 和自动化程度: • 非接触检测; • 环境适应性高; • 检测效率高; • 检测精度高; • 采用计算机和图像处理技术,能够进行智能 化检测
提高图像亮度的方法
• 采用高亮发光器件 • 采用透射或反射式聚光系统——采用柱透镜汇聚亮度提高1倍
但工作距离限定在最佳汇聚位置 • 增加光源数量——2条光源亮度约为1条光源亮度的2倍
安装空间的约束 • 缩短光源与目标之间的距离
其他 • 增大光圈——与通光孔径大小成平方正比关系
牺牲系统景深为代价 • 增大CCD增益——信噪比降低,图像质量下降
光谱特性——补色对成像的ห้องสมุดไป่ตู้响
淡
M(紫紅)
淡
R(紅)
浓
淡 浓 Y(黄色)
淡
浓
B(藍)
G(緑)
淡
C(青色)
淡
LUSTER LightVision
2)镜头
主要参数:光圈、景深、相对孔径、视场角、口径、放大率、 焦距、传函、光谱
机器视觉基本概念——光学镜头

机器视觉基本概念——光学镜头光学镜头1. 焦距 Focal Length光学系统主点到焦点的距离。
2. 景深 Depth of field, DOF是指在摄影机镜头或其他成像器前沿能够取得清晰图像的成像所测定的被摄物体前后距离范围。
3. 数值孔径 Numerical Apeture (NA)孔径⾓:物镜光轴上的物体点与物镜前透镜的有效直接直径所形成的⾓度。
数值孔径 NA: 物镜前透镜与被检物体之间介质的折射率n和孔径⾓θ的正弦的乘积。
4. 分辨率 Resolution分辨率定位为: 能被分辨开来的两个物点之间的最⼩距离,称为镜头的物⽅分辨率,记为Resolution(物) 单位µm只有镜头分辨率和相机分辨率匹配,才能得到最佳成像效果。
像⽅分辨率 = 2 * 像元尺⼨时,说明此时镜头分辨率与相机完全匹配。
5. 畸变 Distortion畸变也称失真,是由于光阑球差的影响,不同视场的主光线通过光学系统后与⾼斯像⾯的交点⾼度不等于理想像⾼,⼆者之差就是畸变。
畸变通常有两种计算⽅法:光学畸变和TV失真。
Optical distortion = Δy/y * 100 [%]6. MTF7. 远⼼镜头与远⼼度当⼈眼观察同⼀个物体,近距离时,感觉物体⽐较⼤,远距离时,感觉物体⽐较⼩,这种现象叫做透视误差.⽤远⼼镜头来消除透视误差。
8. 视场 FOV视场也称为视野,是指能被视觉系统观察到的物⽅可视范围。
9. 放⼤倍率机器视觉⾏业⾥提到的镜头光学放⼤倍率通常是指垂轴放⼤倍率,即像和物的⼤⼩之⽐。
10. ⼯作距离及物像距离⼯作距离(WD)是指镜头最下端机械⾯到物体的距离。
物像距离(O/I)是指物平⾯到相机芯⽚间的距离。
物像距离=⼯作距离+镜头本体长度+法兰距。
11. 法兰距离和镜头接⼝所谓法兰距离,就是指相机机⾝与镜头接触的机械⾯到相机芯⽚之间的距离。
镜头的后截距需和相机的法兰距离对应,才能让光线聚焦在相机芯⽚上。
机器视觉技术的原理与方法

机器视觉技术的原理与方法近年来,随着科技的发展,机器视觉技术越来越受到人们的关注。
机器视觉技术是一种利用计算机技术实现图像识别、图像处理、图像分析等功能的技术。
它不仅有着广泛的应用领域,例如工业制造、医疗、安防、汽车行业等,而且也是人工智能领域重要的组成部分。
本篇文章就从机器视觉技术的原理和方法两方面进行探讨。
一、机器视觉技术的原理1. 光学原理机器视觉技术的基础是光学原理,即球面成像模型。
在这个模型中,通过镜头进入的光在物焦点处汇聚,然后再在透镜中形成像。
所以,镜头内部的结构决定着光路的走向,从而决定着成像质量。
因此,机器视觉技术中的成像设备要求具有高质量的成像能力,以便准确地捕捉到样本的图像信息。
2. 图像处理原理图像处理原理是指对采集的图像进行非线性处理,提高图像的质量、增强图像的信息和降噪等。
图像处理的主要方法包括亮度调整、对比度调整、去噪等。
其中,去噪的作用非常重要,因为噪声会影响后续处理和识别的效果。
3. 特征提取原理特征提取是机器视觉技术中最重要的步骤。
它是指从图像中提取出能表征图像的重要信息的过程。
常用的特征包括纹理、颜色、角点等。
在完成特征提取后,可以进行后续的分类、识别操作。
4. 模式识别原理模式识别是机器视觉技术的核心环节。
它是指对已知的图像进行分类识别的过程。
在此过程中,需要将待分类的图像与已知的模板图像进行对比,并通过匹配来进行分类。
这一过程中,常用的算法包括支持向量机(SVM)、神经网络、决策树等。
二、机器视觉技术的方法1. 目标定位目标定位是指在图像中找到需要处理的目标,以便进行后续的处理。
常用的目标定位方法包括最小二乘法、边缘检测等。
2. 特征提取特征提取是机器视觉技术中比较考验人员经验和技术的重要环节。
好的特征提取方法可以提高图像的识别率和分类率。
其中,常用的特征提取方法包括SIFT、SURF等。
3. 图像匹配图像匹配是机器视觉技术中进行分类识别所必须的步骤。
它是指将待分类的图像与已知的模板图像进行匹配,从而得出分类结果。
工业机器视觉技术的原理与应用
工业机器视觉技术的原理与应用工业机器视觉是指应用计算机视觉技术来实现对工业产品、生产工艺和设备的监测、控制、质量检测和自动化控制等。
它以图像传感器为先导,采用数字图像处理、模式识别、自动控制等技术,通过对图像信息的处理和分析,实现对现场工业环境的现实感知,同时也用于诊断、监测和调试机器故障。
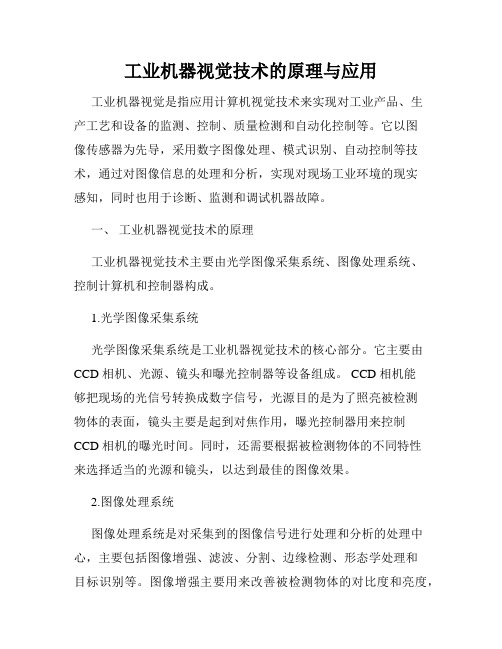
一、工业机器视觉技术的原理工业机器视觉技术主要由光学图像采集系统、图像处理系统、控制计算机和控制器构成。
1.光学图像采集系统光学图像采集系统是工业机器视觉技术的核心部分。
它主要由CCD 相机、光源、镜头和曝光控制器等设备组成。
CCD 相机能够把现场的光信号转换成数字信号,光源目的是为了照亮被检测物体的表面,镜头主要是起到对焦作用,曝光控制器用来控制CCD 相机的曝光时间。
同时,还需要根据被检测物体的不同特性来选择适当的光源和镜头,以达到最佳的图像效果。
2.图像处理系统图像处理系统是对采集到的图像信号进行处理和分析的处理中心,主要包括图像增强、滤波、分割、边缘检测、形态学处理和目标识别等。
图像增强主要用来改善被检测物体的对比度和亮度,滤波则是为消除噪声,分割则是将图像中的目标和背景分离,边缘检测是为了得到目标的轮廓信息,形态学处理用来进行目标结构的填充、腐蚀、膨胀等操作,最后目标识别则是在图像中找出所需的对象,包括形状、大小和颜色等特征。
3. 控制计算机和控制器控制计算机和控制器是用来实现对被检测物体的位置、速度、轮廓、颜色等特征的监测和控制的装置。
在工业机器视觉技术中,最常用的控制器是PLC控制器。
它们在图像处理完成后,将处理结果上传到PLC控制器中,在PLC控制器中进行过滤、处理,使图像处理的结果变成实现控制的信号输出,从而实现自动控制。
二、工业机器视觉技术的应用工业机器视觉技术广泛应用于制造业、半导体、电子、食品、医药、汽车、物流等行业。
其中包括:1. 自动光学缺陷检测工业机器视觉技术可以在生产过程中,实现对产品的缺陷检测,包括开裂、气泡、异物和凹坑等。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
机器视觉所用的光学知识
机器视觉是指让机器能够感知和理解图像或视频的能力。
光学知识在机器视觉中起着重要的作用,以下是一些与机器视觉相关的光学知识:
1. 光学原理:了解光的传播规律、折射、反射和干涉等基本原理。
2. 光学成像:理解光通过透镜、凸透镜和反射镜等光学元件进行成像的原理和方法。
3. 相机结构和镜头:了解相机的构造和工作原理,包括光圈、快门、传感器等部件,以及不同类型的镜头(如定焦镜头、变焦镜头)。
4. 相机标定:通过对相机的内部参数(如焦距、畸变等)和外部参数(相机与场景的相对位置和姿态)进行精确测量和校正,使得图像数据能够准确地与真实世界对应起来。
5. 光照和颜色:光照条件对图像的质量和机器视觉算法的性能有很大影响,了解光源的类型、光照强度和颜色等相关知识。
6. 图像传感器:了解不同类型的图像传感器(如CMOS和CCD),以及它们的工作原理、灵敏度、动态范围和噪声等特性。
7. 图像处理:理解图像的数字化表示和处理方法,包括灰度转换、滤波、边缘检测和图像配准等。
8. 特征提取:通过光学方法提取图像中的特征,如边缘、角点、纹理等,以用于目标检测、跟踪和识别等任务。
9. 立体视觉:利用两个或多个相机获取的图像来进行深度估计和三维重建,需要了解立体成像原理和深度计算方法。
10. 光学检测和测量:光学传感器和测量仪器可以用于检测和测量物体的尺寸、形状、颜色等特征,用于机器视觉中的物体分类、排序和质量控制等应用。
综上所述,了解光学知识对于机器视觉的算法和应用有很大帮助,可以提高图像质量、提取有用特征并准确解读图像中的信息。