槽轮间歇回转机构的设计
槽轮机构的参数及设计

§4.2槽轮机构4.2.1槽轮机构的类型、工作原理和应用图4.10 槽轮机构槽轮机构又称马尔他机构,有外啮合和内啮合两种类型,如图4.10所示。
本节仅介绍常用的外槽轮机构。
槽轮机构由具有径向槽的槽轮2和具有圆销G 的拨杆1及机架所组成。
原动件l作等速连续转动时.,从动件2时而转动,时而静止。
当拨杆l的圆销A未进入槽轮2的径向槽时,由于槽轮2的内凹锁止弧夕被拨杆1的外凸锁止弧卡住,故槽轮2静止不动。
图4.10,a所示是圆销A 开始进入槽轮2的径向槽时的位置,这时锁止弧卢开始被松开,因而圆销A能驱使槽轮转动。
当圆销开始脱离槽轮的径向槽时,槽轮的另一锁止弧又被拨杆1的外凸圆弧卡住,致使槽轮2又静止不转,直至拨杆1的圆销A再次进入槽轮的另一径向槽时,两者又重复上述运动过程。
外啮合槽轮机构,原动拨杆1与从动槽轮转向相反;内啮合槽轮机构,原动拨杆l与从动槽轮2转向相同。
图4.11 槽轮机构在电影放映机中的应用槽轮机构具有构造简单、制造容易、工作可靠和机构效率高等特点;但槽轮机构在工作时有冲击,并随着转速的增加及槽数的减少而加剧,故适用范围受到一定的限制。
槽轮机构常用于某些自动机械(如自动机床、电影放映机等)和轻工机械中作转位机构。
图4.11所示为槽轮机构在电影放映机中的应用。
4.2.2槽轮机构的主要参数槽数n和圆销数k是槽轮机构的两个主要参数。
为了使槽轮开始转动和终止转动时的角速度为零以免刚性冲击,圆销进入或脱离槽轮的径向槽时,圆销中心的轨迹圆应与径向槽的中心线相切。
由图6.10,a 可得槽轮2转动时拨杆1的转角为01022221z ϕπϕπ⎛⎫=-- ⎪⎝⎭ (4-2)在一个运动循环中,槽轮2的运动时间与原动件1的运动时间之比称为运动系数,用τ表示。
对于单销槽轮机构,若原动件等速转动一周为一个运动循环,则时间比可转换成转角之比,即012222d t z t z ϕτπ-=== (4-3)由于d t >0,所以τ>0,因此z ≥3。
机械设计基础-间歇运动机构设计

间歇运动机构设计
间歇运动机构设计
间歇运动机构设计
任务二 槽 轮 机 构
任务导入 图6-13所示为六角车床上刀架转位的槽轮机构,试根据
图形说明其工作原理。
间歇运动机构设计
图6-13 六角车床上的槽轮机构
间歇运动机构设计
任务实施 一、 槽轮机构的组成和工作原理
1.槽轮机构的组成 槽轮机构通常由拨盘、槽轮和机架等组成,如图6-14所 示。其中拨盘1为主动件,槽 轮2为从动件。
间歇运动机构设计
5.几何尺寸 槽轮的槽数z 和圆柱销数k 是由具体的工作要求确定的, 而槽轮机构的中心距a 和圆 柱销的半径则是根据受载情况和 实际机器所允许的空间尺寸的大小来确定的。其他几何尺 寸可由几何关系或经验公式求得,需要时可查阅有关文献。
间歇运动机构设计
四、 槽轮机构在六角车床上的应用 图6-1所示为槽轮机构在六角车床上的应用。当拨盘1转
间歇的进行转位。但因圆柱销 的突然进入与脱离径向槽,传 动存在柔性冲击,不适用于高速场合。此外,槽轮机构的转 角 不能调节,只能用于定转角的间歇运动机构中。
间歇运动机构设计 2.应用 图6-18所示为槽轮机构在电影放映机中的应用,用作送
片机构。
图6-18 电影放映机中槽轮机构
间歇运动机构设计
三、 槽轮机构的主要参数 1.转角 在槽轮机构中,当圆柱销开始进入槽轮的径向槽时,槽轮
间歇运动机构设计
图6-15 内啮合槽轮机构
间歇运动机构设计
2)根据圆柱销数分类 圆柱销可以是一个,也可以是多个。在单圆柱销槽轮机 构中,拨盘转动一周,槽轮转 动一次,如图6-14所示。如果有多 个圆柱销,拨盘转动一周,则槽轮转动多次。图6-16-所示为双 圆柱销外啮合槽轮机构,在这种机构中,拨盘1转动一周,槽轮 转动两次。
槽轮机构设计方案
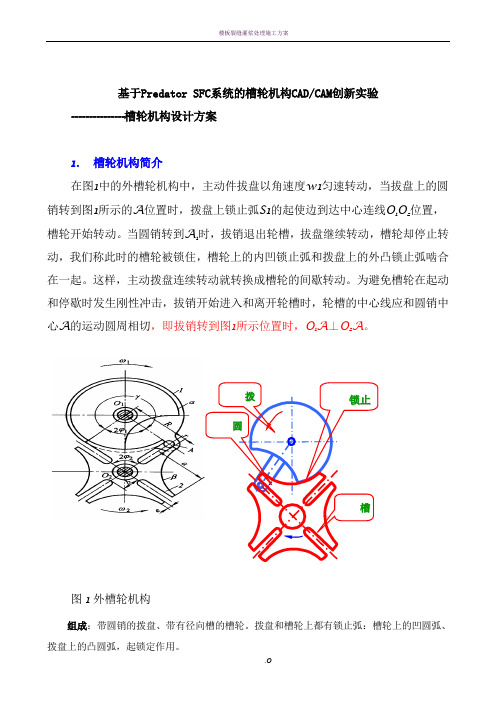
基于Predator SFC 系统的槽轮机构CAD/CAM 创新实验---------------槽轮机构设计方案1. 槽轮机构简介在图1中的外槽轮机构中,主动件拔盘以角速度w1匀速转动,当拔盘上的圆销转到图1所示的A 位置时,拨盘上锁止弧S1的起使边到达中心连线O 1O 2位置,槽轮开始转动。
当圆销转到A 1时,拔销退出轮槽,拔盘继续转动,槽轮却停止转动,我们称此时的槽轮被锁住,槽轮上的内凹锁止弧和拨盘上的外凸锁止弧啮合在一起。
这样,主动拨盘连续转动就转换成槽轮的间歇转动。
为避免槽轮在起动和停歇时发生刚性冲击,拔销开始进入和离开轮槽时,轮槽的中心线应和圆销中心A 的运动圆周相切,即拔销转到图1所示位置时,O 1A ⊥O 2A 。
图1外槽轮机构组成:带圆销的拨盘、带有径向槽的槽轮。
拨盘和槽轮上都有锁止弧:槽轮上的凹圆弧、拨盘上的凸圆弧,起锁定作用。
ωωo o 锁止弧 槽轮 拨盘 圆销工作过程:拨盘连续回转,当两锁止弧接触时,槽轮静止;反之槽轮运动。
作用:将连续回转变换为间歇转动。
特点:结构简单、制造容易、工作可靠、机械效率高,能平稳地、间歇地进行转位。
因槽轮运动过程中角速度有变化,不适合高速运动场合。
2.槽轮机构优点(1)结构简单,工作可靠,效率较高;(2)在进入和脱离啮合时运动较平稳,能准确控制转动的角度;(3)转位迅速,从动件能在较短的时间内转过较大的角度;(4)槽轮转位时间与静止时间之比为定值。
3.槽轮机构缺点(1)槽轮的转角大小不能调节;(2)槽轮转动的始、末位置加速度变化较大,从而产生冲击:(3)在工作盘定位精度要求较高时,利用锁紧弧面往往满足不了要求,而需另加定位装置。
(4)槽轮的制造与装配精度要求较高。
由于这些原因,槽轮机构一般应用在转速不高的装置中。
4.槽轮机构的工作原理槽轮机构,又叫马尔他机构或日内瓦机构,由具有径向槽的槽轮1和具有拨销2的拨杆3组成,其工作原理如图2所示。
图2 槽轮机构工作原理简图当拨杆转过一定的角度,拨动槽轮转过一个分度角,由图(a)所示的位置转到图(b)所示的位置时,拨销退出轮槽,此后,拨杆空转,直至拨销进入槽轮的下一个槽内,才又重复上述的循环。
槽轮间歇回转机构的设计
1
1.1本课题的研究内容和意义
槽轮机构是由槽轮和圆柱销组成的单向间歇运动机构,又称马尔他机构。它常被用来将主动件的连续转动转换成从动件的带有停歇的单向周期性转动。槽轮机构有外啮合和内啮合以及球面槽轮等。外啮合槽轮机构的槽轮和转臂转向相反,而内啮合则相同,球面槽轮可在两相交轴之间进行间歇传动。
Afteranalyzed the theory of Geneva Mechanism ,established the mathematical model ,and
optimized the parameters. This design can make the Geneva Mechanism run smoothly ,and show an effectivemethod of the link to CAD system.
槽轮机构是一种步进间歇运动机构,由于结构简单、制造容易、工作可靠,能准确地控制转角, 机械效率高, 所以在自动和半自动生产线中得到广泛的应用。但是其动程不可调节,转角不能太小,槽轮在起、停时的加速度大,有冲击,并随着转速的增加或槽轮槽数的减少而加剧,故不宜用于高速,多用来实现不需经常调节转位角度的转位运动。
The round pin ofthe traditionalgenevamechanism in the crank on the to enter the or the escape grooves round of meshing an instant, its angular acceleration a larger. In order to so that the groove wheel mechanism smooth transmission, to reduce the impact of the phenomenon, the This design uses to adopt a correction groove wheel mechanism, it is take advantage of to round pin and eccentric the planetary motion of and slot ቤተ መጻሕፍቲ ባይዱound of meshing to achieve, to make the transmission become more smooth.
间歇性回转工作台设计介绍
3 槽轮机构
槽轮机构的特点:是结构简单、工作可 靠、机械效率高,但制造与装配精度要 求高,且转角大小不能调节。分度精度 由定位机构的精度保证。
3.1槽轮机构
3.2槽轮机构应用实例
4 凸轮分度机构
凸轮间歇运动机构是利用凸轮与转位拨 销的相互作用,将凸轮的连续转动转换 为转盘的间歇转动,用于交错轴间的分 度运动。 精度等级:高精级≤±15〞 精密级≤±30〞 普通级≤±50〞
⑷带斜面圆柱销、单斜面销定位:由于斜面 作用,分度孔与分度定位器始终是同侧接触, 分度精度较高,可达±10″。
如图4.1所示为一斜面分度装置
图4.1 斜面分度装置
⑸正多面体定位:结构简单,制造容易,分 度精度较高,操作费时,分度数不宜过多。
6、精密分度
特点:误差均化,分度精度大大提高;精度重复性 和持久性好;必须有抬起机构、锁紧机构;防尘要 求严;利用双层齿盘结构,可实现细分。
5 附加定位器分度机构
⑴钢球定位:结构简单,操作方便,但锥坑 浅,定位不可靠,用于切削力小,分度精度 要求不高的场合,或做精密分度的预定位。
⑵圆柱销定位:结构简单,制造容易,分度 副间隙影响分度精度,一般±1′~10′。
⑶圆锥销、双斜面销定位:能消除分度副间 隙对分度精度的影响,分度精度较高,但制 造较复杂,灰尘影响分度精度。
工作原理:转 2抬3分开啮合 →转3分度→ 反转2啮合锁 紧
图6.1 分度示意图
如图6.1,B与C啮合,齿120,A与B啮合,齿121,先A和B一 起相对C顺时针转动一个齿,转过了:360°/120;再A相对B逆 时针转过一个齿,转动了:360°/121。结果:A相对C逆时针 转动了:360°/120-360°/121=1′30″,实现了细分。
5.2间歇机构实验

实验5.2 间歇机构实验在各类机械中, 常需要使某些构件实现周期性的运动和停歇。
能将主动件的连续运动转换成从动件有规律的运动和停歇的机构, 称为间歇运动机构。
其中,槽轮机构是各类机械中常用的实现间歇运动的典型机构。
本实验主要针对外槽轮机构分析其运动特性。
【实验目的】1. 了解槽轮机构的运动过程。
2. 学会槽轮机构间歇运动的分析。
【实验内容】1.实验仪器CL-I 槽轮机构实验台,其机构主要有四槽轮机构、五槽轮机构和六槽轮机构组成,主要用于检测几种平面槽轮机构的运动规律。
有关击鼓尺寸参数如下:槽轮槽数:Z1=4,Z2=5,Z3=6拨盘圆销数:n1=1,n2=1,n3=1拔销滚子直径:d1=35mm ,d2=32mm ,d3=26mm槽轮中心距:L1=L2=L3=160mm槽轮外径:D1=278.96mm ,D2=260.86mm ,D3=278.34mm2.工作原理如图1所示,槽轮机构是由主动拨销轮、从动槽轮及机架组成,从动槽轮是由多个径向导槽所构成,各个导槽依次间歇地工作。
当主动拨销轮轴匀速转过h θ角时, 拨销拨动槽轮转过一个分度角h τ, 拨销退出导槽;然后拨杆又转过( 2π-h θ) 角, 此时槽轮静止不动, 直到拨销进入下一个导槽内时, 再重复上述过程,槽轮的定位通常是利用拨销轮上外凸的锁止弧锁住, 从而实现槽轮的单向间歇运动。
图1 槽轮机构如图2 所示, O1、O2 分别为从动槽轮和主动拨销轮的中心, A 、B 分别为拨销进入和退出导槽时的状态。
由于拨销在进入和退出导槽时, 其速度方向与导槽的中心线方向保持一致, 因此在这2 个位置上, 拨销轮的半径与槽的中心线相互垂直。
所以,h τ+h θ=π 。
图2 拨销进入和退出导槽轮的位置槽轮机构相关参数:槽轮运动角: β2=zπ2 拨盘运动角: α2=βπ2-拨盘上圆销数目:()22-<Z Z m圆销中心轨迹半径:βsin 1⨯=L R槽轮外径:()⎥⎥⎦⎤⎢⎢⎣⎡⎪⎭⎫ ⎝⎛+⨯=21222sin d L R β 槽轮深度:δ++-+=221d L R R h 拨盘回转轴直径:()212R L d -< 拨盘上锁止弧所对中心角:⎪⎭⎫ ⎝⎛-=απm v 2 槽轮每循环运动时间:n z z t r ⎥⎦⎤⎢⎣⎡-=230槽轮每循环停歇时间:()()n mz z m z t d ⎥⎦⎤⎢⎣⎡--=2230槽轮机构的动停比:()()()()222---=z m z z m k当槽轮槽数较大时,一般δ的取值范围为3-6mmTL-I 凸轮机构试验台采用单片机与A/D 转换集成相结合进行数据采集,处理分析及实现与PC 机的通信,达到适时显示运动曲线的目的。
槽轮机构设计与制作毕业设计说明书
%
F500.
O0125
N116 G1 X-15.
N100 G21
N118 G2 X-14.6 Y0. I0. J-.4
N102 G0 G17 G40 G49 G80 G90
N120 X-15. Y-.4 I-.4 J0.
N106 G0 G90 G54 X-26.024 Y-.1 A0.
N122 G1 X-32.253
(三)机床的选择
数控铣床选择学校车间的法兰克数控铣床。
(四)装夹方式的确定
在铣削时,也就是在利用加工中心进行加工时大多数情况下会选择机床所带的通用夹 具平口钳对工件进行定位和夹紧。因为平口钳对方形毛坯装夹比较方便,所以选择平口钳 装夹。
(五)刀具的选择
在整个加工过程中一共需要选择二把道具:直径为 6mm 立铣刀,直径为 10mm 中心钻 和钻花。
J-.657 N160 G3 X35.25 Y-7.788 I-.108
J3.599 N162 X35.826 Y-4.443 I-35.25 J7.788 N164 X35.853 Y-4. I-3.573 J.443 N166 X32.253 Y-.4 I-3.6 J0. N168 G1 X15. N170 G2 X14.6 Y0. I0. J.4 N172 X15. Y.4 I.4 J0. N174 G1 X32.253 N176 G3 X35.853 Y4. I0. J3.6 N178 X35.826 Y4.443 I-3.6 J0. N180 X35.25 Y7.788 I-35.826 J-4.443 N182 X31.843 Y10.61 I-3.515 J-.777 N184 G2 X10.61 Y31.843 I.657 J21.89
机械原理 间歇运动机构
O
棘轮
制动棘爪
二,棘轮机构的类型,特点和应用 棘轮机构的类型,
(一)齿式棘轮机构 特点: 特点: 依靠棘齿传动,运动可靠; 依靠棘齿传动,运动可靠; 棘爪在齿面上滑行时引起噪音和齿尖磨损. 棘爪在齿面上滑行时引起噪音和齿尖磨损. 1.单动式棘轮机构 单动式棘轮机构 2 4
棘轮机构
3
o 4 2
1
外棘轮机构
(1)要使槽轮运动, )要使槽轮运动, τ
≥ ; > 0 ,z≥3;
z2 τ = k( ) 2z
ω1
(2)z ,τ ,槽轮运动时间 ; ) (3)确保槽轮有停歇时间, )确保槽轮有停歇时间, τ
<1,
E O1
4)对于K=1的槽轮ຫໍສະໝຸດ 构 τ 的槽轮机构, (4)对于K=1的槽轮机构,
2z k< z2
< 0 .5
间歇运动机构
§6-1 槽轮机构
一,槽轮机构的类型及工作原理 γ E
ω1 S1 O1
槽轮机构
P
201 202
F S2
P
O2
外槽轮机构
ω2
内槽轮机构
球面槽轮机构
内槽轮机构
球面槽轮机构
电影机构
二,槽轮结构的设计
确定槽数Z,圆销数 及槽轮机构的尺寸 确定槽数 ,圆销数K及槽轮机构的尺寸
ω1
(一)槽数Z,圆销数 的选择 槽数 ,圆销数K的选择
§6-3 不完全齿轮机构
一,不完全齿轮机构
外不完全齿 轮传动
内不完全齿 轮机构
二,不完全齿轮机构的传动过程
(一)z=1的传动过程 的传动过程 1. 轮1齿廓与轮 齿顶尖 接触; 齿廓与轮2齿顶尖 接触; 齿廓与轮 齿顶尖E接触 2. 实际啮合线B1B2上啮合; 上啮合; 实际啮合线 3. 轮1齿顶尖 与轮 齿廓接触. 齿顶尖D与轮 齿廓接触. 齿顶尖 与轮2齿廓接触 (二) z>1的传动过程 的传动过程 z>1的传动过程可视为: 的传动过程可视为: 的传动过程可视为 1.z=1的传动过程 的传动过程 2.( z-1)个齿的普通齿的传动 ( ) D o1 ra1 B2 PE c B1 ra2 o2 ω2 2 ω1 1
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
编号无锡太湖学院毕业设计(论文)题目:槽轮间歇回转机构的设计信机系机械工程及自动化专业学号:学生姓名:指导教师:2013年5月25日无锡太湖学院本科毕业设计(论文)诚信承诺书本人郑重声明:所呈交的毕业设计(论文)槽轮间歇回转机构的设计是本人在导师的指导下独立进行研究所取得的成果,其内容除了在毕业设计(论文)中特别加以标注引用,表示致谢的内容外,本毕业设计(论文)不包含任何其他个人、集体已发表或撰写的成果作品。
班级:学号:作者姓名:2013 年5 月25 日无锡太湖学院信机系机械工程及自动化专业毕业设计论文任务书一、题目及专题:1、题目槽轮间歇回转机构的设计2、专题二、课题来源及选题依据槽轮机构是由槽轮和圆柱销组成的单向间歇运动机构,又称马尔他机构。
它常被用来将主动件的连续转动转换成从动件的带有停歇的单向周期性转动。
槽轮机构有外啮合和内啮合以及球面槽轮等。
外啮合槽轮机构的槽轮和转臂转向相反,而内啮合则相同,球面槽轮可在两相交轴之间进行间歇传动。
槽轮机构是一种步进间歇运动机构,由于结构简单、制造容易、工作可靠,能准确地控制转角, 机械效率高, 所以在自动和半自动生产线中得到广泛的应用。
但是其动程不可调节,转角不能太小,槽轮在起、停时的加速度大,有冲击,并随着转速的增加或槽轮槽数的减少而加剧,故不宜用于高速,多用来实现不需经常调节转位角度的转位运动。
三、本设计(论文或其他)应达到的要求:①阅读外文资料,翻译与所学专业或课题相关的外文文献5000字左右,语句通顺、流畅、准确。
②了解槽轮机构的工作原理。
③根据加工产品具体结构和加工要求,拟定分析设备设计方案。
④绘制整套零件图,装配图,各零件的精度配合。
⑤用三维软件进行造型,画出修正槽轮机构的三维图。
⑥撰写论文,要求符合本科论文的格式要求,语言简洁、流畅、层次分明。
整个毕业设计过程的技术工作要严谨、灵活、工作要有主动性,计算方法、计算的程序、计算结果、结论要正确。
四、接受任务学生:班姓名五、开始及完成日期:自2012年11月12日至2013年5月25日六、设计(论文)指导(或顾问):指导教师签名签名教研室主任〔学科组组长〕签名研究所所长系主任签名2012年11月12日摘要槽轮机构是由槽轮和圆柱销组成的单向间歇运动机构,又称马尔他机构。
它常被用来将主动件的连续转动转换成从动件的带有停歇的单向周期性转动。
槽轮机构有外啮合和内啮合以及球面槽轮等。
外啮合槽轮机构的槽轮和转臂转向相反,而内啮合则相同,球面槽轮可在两相交轴之间进行间歇传动。
传统的槽轮机构在曲柄上的圆销进入或脱离槽轮啮合瞬间,其角加速度较大。
为使槽轮机构传动平稳,减少冲击现象,本设计采用采用一种修正槽轮机构,它是利用圆销偏心的行星运动和槽轮啮合来实现,使传动更趋平稳。
本设计中的修正槽轮机构是用于塑料颗粒物用塑料薄膜制袋充填封口后,将塑料袋进行堆集的简式集装入库装置中回转栅板部件里的一个转位机构。
它通过改变柱销进入或退出啮合时的撞击现象,即使其进入或退出啮合时瞬时角加速度等于零,从而使槽轮机构转动平稳、能传递一定的动力,扩大其使用范围。
在分析了槽轮机构工作原理和设计中所存在的问题基础上,建立数学模型,并对参数进行了优化设计,能有效地解决了槽轮机构在运动过程中的不平稳性,最大限度的降低冲击,为进一步和CAD系统的连接提供了有效途径。
关键词:修正槽轮机构;间歇;优化设计AbstractThe geneva mechanism is composed of sheaves and cylindrical pin unidirectional intermittent motion mechanism, also known as Malta institutions. It is often used to active continuously rotating parts to convert follower with a one-way stop periodic rotation. Sheave outer meshing with the ring and the spherical sheaves. The external mesh the Geneva mechanism sheave and turn turn in the opposite arm, internal meshing same spherical sheaves intermittent transmission between two intersecting axes.The round pin of the traditional geneva mechanism in the crank on the to enter the or the escape grooves round of meshing an instant, its angular acceleration a larger. In order to so that the groove wheel mechanism smooth transmission, to reduce the impact of the phenomenon, the This design uses to adopt a correction groove wheel mechanism, it is take advantage of to round pin and eccentric the planetary motion of and slot round of meshing to achieve, to make the transmission become more smooth.The correction geneva mechanism is used for filling and sealing of plastic particles with plastic film bag making, simple set of plastic bags piled an indexing mechanism mounted storage device rotary grid plate parts. It works by changing the dowel pin to enter or exit engagement impact phenomenon, even if it enters or exits the engagement instantaneous angular acceleration is equal to zero, the Geneva mechanism smooth rotation can pass a certain power to expand the scope of its application.After analyzed the theory of Geneva Mechanism ,established the mathematical model ,and optimized the parameters. This design can make the Geneva Mechanism run smoothly ,and show an effectivemethod of the link to CAD system.Key words: Corrected geneva mechanism;intermittent;optimization design目录摘要........................................................................................................................................... I II ABSTRACT .................................................................................................................................. I V 目录.. (V)1 绪论 (1)1.1 本课题的研究内容和意义 (1)1.2 国内外的发展概况 (1)1.3 本课题应达到的要求 (2)2 槽轮机构的概述 (3)2.1 槽轮机构简介 (3)2.1.1 分类 (3)2.1.2 工作过程 (5)2.1.3 组成 (5)2.1.4 作用 (5)2.1.5 特点 (5)2.1.6 优缺点 (5)2.2 槽轮机构应用和研究现状 (6)2.2.1 应用和研究现状 (6)2.2.2 修正槽轮机构 (7)3 槽轮机构的工作原理 (14)3.1 工作原理 (14)3.2 角速度和角加速度分析 (16)4 槽轮机构的设计方案 (18)4.1总设计方案 (18)4.2 主要部件的设计 (18)4.2.1 槽轮 (18)4.2.2 主动轮臂 (19)4.2.3 滚动轴 (20)4.2.4 槽轮轴 (21)4.2.5 主要标准件的选取 (23)4.2.6 偏心轴 (24)4.3 装配关系 (24)5 结论 (29)致谢 (30)参考文献 (31)1 绪论1.1 本课题的研究内容和意义槽轮机构是由槽轮和圆柱销组成的单向间歇运动机构,又称马尔他机构。
它常被用来将主动件的连续转动转换成从动件的带有停歇的单向周期性转动。
槽轮机构有外啮合和内啮合以及球面槽轮等。
外啮合槽轮机构的槽轮和转臂转向相反,而内啮合则相同,球面槽轮可在两相交轴之间进行间歇传动。
槽轮机构是一种步进间歇运动机构,由于结构简单、制造容易、工作可靠,能准确地控制转角, 机械效率高, 所以在自动和半自动生产线中得到广泛的应用。
但是其动程不可调节,转角不能太小,槽轮在起、停时的加速度大,有冲击,并随着转速的增加或槽轮槽数的减少而加剧,故不宜用于高速,多用来实现不需经常调节转位角度的转位运动。
本毕业设计中的修正槽轮机构是用于塑料颗粒物用塑料薄膜制袋充填封口后,将塑料袋进行堆集的简式集装入库装置中回转栅板部件里的一个转位机构。
它通过改变柱销进入或退出啮合时的撞击现象,即使其进入或退出啮合时瞬时角加速度等于零,而使槽轮机构转动平稳、能传递一定的动力,扩大其使用范围。
1.2 国内外的发展概况槽轮机构以结构简单、工作较为可靠等特点,在自动机械中被广泛采用。