振动控制技术现状与进展
工程中的振动问题的研究进展
工程中的振动问题的研究进展摘要:随着科学技术的发展,工程中的振动问题愈来愈受到人们的关注,研究进展也越来越迅猛。
本文将针对工程中的振动问题,结合国内外近年来的研究成果,综述其研究进展。
关键词:振动、问题研究、相关进展引言振动问题是工程学中常见的问题,其出现与各种机械、结构、交通工具等都有关系,因此振动问题的研究具有广泛的应用价值。
工程中的振动问题主要与以下几个方面相关:机械系统的振动、建筑结构的振动、交通工具的振动等。
而随着技术的不断发展,工程中的振动问题的研究也不断深入,涉及到许多新的技术与理论。
本文主要介绍工程中的振动问题的研究进展,包括振动的产生机理、振动测试与分析、振动控制等方面,旨在全面介绍当前振动问题研究的最新进展与趋势。
一、振动理论的发展振动理论是研究振动中物体的固有频率、振幅、相位和波形等基本特性的一门学科。
在振动理论的发展过程中,人们逐渐认识到,振动不仅是一种物理现象,而且也与其他相关学科有着密切的联系。
因此,振动理论呈现出相对于其他学科交叉性、前沿性与综合性的特点。
在振动理论的发展史中,有三个重要的时间节点:牛顿的刚体力学理论、达朗伯的振动理论和拉格朗日的变分方法。
(1)牛顿的刚体力学理论牛顿的刚体力学理论是振动理论发展的起始点。
在牛顿的刚体力学理论中,振动是一种无限小的运动,假设了振动的幅值趋近于零,不会影响刚体的运动,即振动不会使刚体的形状、大小和内部结构发生变化。
(2)达朗伯的振动理论达朗伯是振动理论研究的先驱之一。
他提出了振动现象的均匀机械解释,即振动是一种力的作用,它可以通过连续介质力学来进行描述。
通过分析物体在不平衡力作用下的运动,他发现了很多重要的物理现象,如振动的相位、共振、衰减等。
(3)拉格朗日的变分方法拉格朗日在振动理论中应用了变分方法,创造出了拉格朗日动力学,使振动问题得到了较为客观、简洁、优美的描述。
通过运用拉格朗日方程,可以求解出物体在某一时刻的特定状态下的运动状态,即使在复杂条件下,也可以求解出振动的各种变量。
土木工程结构振动控制的概况与新进展
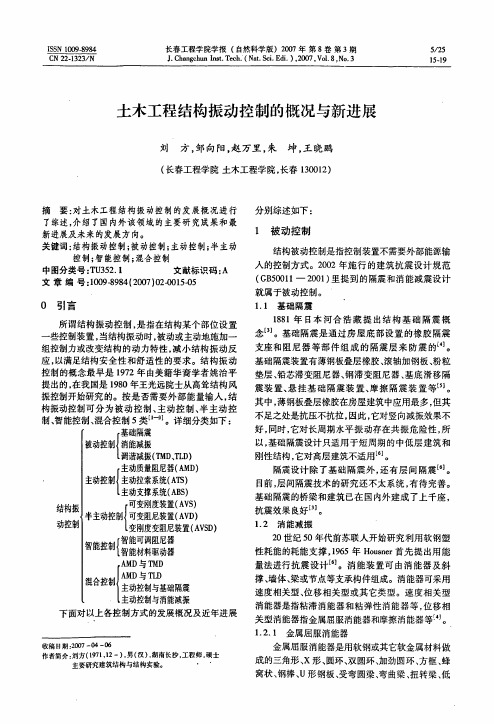
主 支 系 (A s 动撑 统 B )
可 刚 装 变 度 置(A ) Vs 结构振 半主动控制 可 阻 装 (A D) 变 尼 置 V 动控制 变刚 变 尼 度 阻 装置(AV SD) 智能可调阻尼器 智能 料 动 材 驱 器
抗 效 良[ 。 震果好 ] 3
智控{ 能制
混合控制
1. 2 消能减振 20 世纪50 年代前苏联人开始研究利用软钢塑 性耗能的耗能支撑, 6 年 Ho s e 首先提出用能 9 15 unr
长春工程学院学报( 自 然科学版)
2加7 , 3 ) 8(
屈服点钢剪切板、 铅消能器、 铅粘弹性消能器、 无粘 结支撑等形式的消能器。 其中, 无粘结支撑在日 本、
动控制外加能源过大的缺点。
摩擦消能 器在加拿大和日 本应用的比 较多。在 199 台 美国 湾和 都得到推广应用〔。 ’ 低屈服点钢消能 我国, 7 年吴波等利用摩擦阻尼器加固了东北某 〕 府大楼; 999 年欧进萍、 斌、 l 吴 邹向阳 将自 研制 等 己 器、 窝 蜂 状消能 器在日 栋建筑中 本多 得到应用〔 ’ ]。 政
基础隔震 消能减振
调 减 谐 振(WD、 TLD) 主 拉 系 (A 动 索 统 飞)
动 量 尼 (A D) 主 动 控制产主 质 阻 器 M
1 、 . . . ‘
刚 结 它 高 建 不 用 。 性 构,对 层 筑 适 [ 1 6
隔 计除了 震设 基础隔 震外, 还有层间隔 6 。 震[ ]
目 层间隔震技术的研究还不太系统, 前, 有待完善。 基础隔震的 桥梁和建筑已在国内 外建成了上千座,
分别综述如 下: 1 被动控制
结构被动控制是指控制装置不需要外部能源输 人的控制方式。200 年施行的建筑抗震设计规范 2
振动控制技术现状与进展
振动控制技术现状与进展摘要:由于在第二次世界大战中,战斗机和其他军事设施因震动而引起的注意,为了更有效地模拟产品的真实振动环境,验证产品的可靠性,引进了振动试验,随着现代科学技术的发展,振动试验在生产中发挥着越来越重要的作用,振动试验系统主要由振动器、控制器组成,几十年来,为了更准确地模拟真实的振动环境,激励器变得越来越复杂,一个问题出现了如何精确控制励磁机,使励磁机产生的振动信号与试验中要求的信号相匹配。
关键词:振动控制;技术现状;进展;前言:振动控制系统可处理的振荡频率范围,即频带,主要由系统自身刚度决定。
刚度与系统自然频率成正比,刚度降低自然频率,从而扩大了系统可以控制的振荡频率范围,进一步降低了振动的负面影响。
一、振动控制技术现状与进展1.振动设备。
机械振动台主要有一个不平衡的部件和凸轮类型。
不平衡重块是一种离心力,由不对称的质量旋转产生,以刺激桌子振动,激发力与不平衡力矩和扭矩的平方成正比。
这种振动平台可以产生正弦振动,其结构既简单又便宜,但只能在5赫兹1100赫兹范围内工作,最大移动距离为6毫米峰,最大加速度为10克,不能产生随机波动。
凸轮振动器移动的部分取决于凸轮的偏心度和曲轴的长度,兴奋力随移动部分的质量而变化。
这个低频场的振动平台,当激发力很大的时候,会产生很大的波动,比如100毫米。
而上面的频率限制在20赫兹左右。
最大加速度约为3 g,加速度大。
由于其特性的限制,机械振动器主要适用于要求较低的领域。
电动振动器是一种设备,目前广泛用于测试振动。
它的工作原理是电磁感应设计,当导体受到持续磁场中的力时,当导体通过交替振动电流时。
振动线圈位于高磁感应的真空中,需要信号发生器或振动控制器的振荡信号,在功率放大器放大到激磁线圈后,振动线圈产生所需的振动形式。
电动振动器范围广泛,小型振动平台0 Hz 1 10 khz范围,大振动平台0 Hz - 2 khz范围;广泛的动态范围,容易实现自动或手动控制;加速波的形状很好,适合随机波的形成。
准零刚度振动控制系统的研究进展
第45卷第1期 2021年2月南京理工大学学报Journal of Nanjing University of Science and TechnologyV'45N'1Feb.2021准零刚度振动控制系统的研究进展吴明亮,赵晨名,张来喜(兰州理工大学机电工程学院,甘肃兰州730050)摘要:基于准零刚度振动控制系统在低频振动时具有优良的性能,该文分析研究了准零刚度振动控制系统的基本原理、结构设计的研究进展以及系统在车辆振动控制、精密制造等不同领域的应用。
在此基础上,为克服准零刚度振动控制系统存在的不足,研究了准零刚度振动控制系统与其他学科的新技术交叉融合提升其抑振能力的方法,展望了这种振动控制方法在不同领域的应用前景。
关键词:准零刚度;负刚度;低频振动;振动控制;隔振系统中图分类号:〇328 文章编号:1005-9830(2021 $01-0018-09DO I: 10.14177/ki.32-1397n.2021.45.01.002Research progress of quasi-zero stiffness vibration control systemWu Mingliang,Zhao Chenming,Zhang Laixi(School of Mechanical and Electronical Engineering,Lanzhou University of Technology,Lanzhou 730050,China)Abstract: The vibration control systembased on quasi-zero stiffness exhibits excellent performance in lowfrequency vibration. This paper analyzes the basic principle of the quasi-zero stiffn control system,the latest r esearch of its structure design and the applications of this system in different fields such a s vehicle vibration control,precision manufacturing and so on. In order to overcome the shortcomings of the quasi-zero stiffness vibration control system,the methods to improvethe vibration suppression a bility of the system by merging with other disciplines and new technologiesare studied,and the application prospect of this vibration control method in different fields is prospected as well.Key words:quasi-zero stiffness; negative stiffness#low frequency vibration#vibration control;industrial manufacture;vibration isolation system收稿日期:2020-08-25 修回日期:2020-11 -27基金项目:国家自然科学基金(51765031)作者简介:吴明亮(1965-),男,教授,主要研究方向:机器人技术、数控技术;********************;通讯作 者:张来喜(1973-),男,副教授,主要研究方向:机器人技术,机械电子工程;E-ma1l:la i_Z*******〇m。
建筑结构振动分析与控制研究
建筑结构振动分析与控制研究1. 引言建筑结构的振动是指结构在受到外界力的作用下发生的运动。
振动问题一直以来都是建筑工程中的一个重要课题,对于保证建筑结构的安全性、舒适性和耐久性至关重要。
本文将探讨建筑结构振动的分析和控制方法,以及相关研究进展。
2. 建筑结构振动分析2.1 建筑结构振动的分类建筑结构的振动可分为自由振动和强迫振动。
自由振动是指建筑结构在没有外界力作用下的自身振动,如地震、风荷载等;而强迫振动是指建筑结构受到外界力作用的振动,如机械设备运转等。
2.2 振动模态分析振动模态分析是一种常用的建筑结构振动分析方法。
它通过求解结构的固有振动频率和模态形状,得到结构的振动特性。
通常采用有限元法作为振动模态分析的数值计算方法,这种方法具有计算精度高、适用范围广等优点。
3. 建筑结构振动控制3.1 主动控制方法主动控制方法是指通过引入外界控制力来改变建筑结构的振动特性。
常见的主动控制方法包括质量和刚度变化法、控制杆法以及智能材料控制等。
这些方法能够实时调节建筑结构的振动特性,从而减小结构的振动响应。
3.2 被动控制方法被动控制方法是指通过在结构上添加附加物用以吸收或耗散振动能量,从而减小结构的振动响应。
常见的被动控制方法包括隔震、摆锤、液体阻尼器等。
这些方法通过改变结构的动力特性,降低结构与外界激励的耦合效应,从而减小结构的振动响应。
4. 建筑结构振动控制研究进展4.1 结构振动控制理论研究近年来,随着计算机技术和控制理论的不断发展,建筑结构振动控制研究取得了重要进展。
研究人员通过建立结构动力模型和振动控制模型,提出了一系列高效的振动控制算法和方法。
4.2 智能材料在振动控制中的应用智能材料在振动控制中具有重要的应用潜力。
形状记忆合金和压电材料等智能材料可以根据外界激励的变化自动调节其力学性能,从而减小建筑结构的振动响应。
研究人员通过开展智能材料在建筑结构振动控制中的应用研究,为解决建筑结构振动问题提供了新的思路和方法。
火炮振动与控制的发展现状及应用前景

第41卷第6期2021年12月振动、测试与诊断Vol.41No.6Dec.2021 Journal of Vibration,Measurement&Diagnosis火炮振动与控制的发展现状及应用前景∗杨国来,葛建立,孙全兆,王丽群(南京理工大学机械工程学院南京,210094)摘要火炮是一个多场耦合复杂系统,其发射过程具有高瞬态和强冲击特征,火炮振动是影响射击精度的重要因素之一,是火炮领域的重要研究内容。
近年来提出了火炮多体系统动力学、非线性动态有限元、多目标多学科优化及不确定性等火炮现代设计理论与方法,对炮身、架体、底盘等重要部件及各部件间连接关系组成的火炮系统进行建模、仿真及优化,从而达到减小炮口振动、提高射击稳定性和射击安全性的目的。
笔者从火炮振动与系统优化、弹炮耦合、火炮不确定性分析与优化等方面对近年来取得的成果进行了总结和分类讨论,并提出了火炮振动领域存在的问题及火炮振动与控制的应用前景。
关键词火炮振动;射击精度;多体系统动力学;有限元法;弹炮耦合;不确定性中图分类号TJ3引言火炮在第二次世界大战中被誉为“战争之神”,是当今世界各国军队常规武器装备的主体。
火炮发射过程中,在高温、高压、高瞬态火药燃气压力作用下不可避免地产生振动,特别是炮口振动会对火炮射击精度造成不利影响。
火炮射击精度涉及到火炮、弹药及气象条件等,是一个复杂的系统问题。
为了研究方便,常常将火炮划分成不同的子系统,但是不同子系统之间是相互影响和高度耦合的。
因此,采用完整的系统方法来解决精度问题是一个更好的选择。
近年来,连续体力学、动力学设计、数值和计算机技术以及测试技术等各个学科分支在解决复杂工程问题中取得了很大进展,这为通过新技术更好地理解和改进火炮射击精度提供了可能性[1]。
火炮射击精度包括射击准确度和射击密集度,射击准确度与系统误差有关,可以修正;射击密集度是惯性弹丸的随机散布,与多种不确定性有关,无法消除,但是可以通过合理设计,控制在一定范围内。
随机、智能结构随机振动分析与主动控制研究

随机、智能结构随机振动分析与主动控制研究随机、智能结构随机振动分析与主动控制研究一、引言随机振动是工程结构在实际运行过程中普遍存在的现象之一,其对于结构的稳定性和安全性具有重要影响。
传统的结构振动分析方法主要基于确定性的力学模型,无法有效预测和控制结构在不确定环境下的随机振动行为。
因此,随机振动分析与主动控制成为了当今结构工程领域的热点研究方向。
二、随机振动分析方法随机振动分析方法主要包括统计分析和模拟方法。
统计分析方法通过统计学的概率方法研究结构在不确定环境下的振动特性。
常用的统计分析方法有功率谱分析、概率密度函数分析和相关函数分析等。
模拟方法则通过利用数值计算和仿真技术,模拟结构在不确定环境下的振动响应。
三、智能结构与振动控制智能结构是指具有感知、计算和执行能力的结构系统,能够根据结构的实际工况自主调整结构的性能。
智能结构的出现为结构振动的主动控制提供了新的途径。
智能材料和智能控制技术是实现智能结构的关键。
智能材料能够根据环境变化自主调整其力学性能,从而实现结构的自适应。
智能控制技术采用传感器和执行器对结构振动进行实时监测和调控,以抑制结构的振动响应。
四、随机振动与主动控制的结合随机振动与主动控制相结合,可以有效地降低结构振动对结构安全性和舒适性的影响。
通过智能结构技术和振动控制策略,可以在结构受到随机激励时主动调整结构的刚度、阻尼和质量等特性,从而减小结构振动响应。
具体而言,主动控制技术包含自适应振动控制和半主动振动控制两种方法。
自适应振动控制方法通过实时监测振动信号,根据反馈控制原理调整结构的控制参数,实现结构的振动抑制。
半主动振动控制方法则采用可调阻尼器或扭转梁等装置,通过控制这些装置的特性来主动消耗结构的振动能量。
五、研究现状与进展目前,随机振动分析与主动控制研究方向取得了许多重要的进展。
在振动分析方面,研究者通过建立随机结构模型,运用统计学和概率方法对随机振动进行了深入研究。
在振动控制方面,智能材料和智能控制技术的发展为实现结构的主动控制提供了新的思路和方法。
微振动控制技术研究现状综述

微振动控制技术研究现状综述摘要:随着科学技术的快速发展,地铁、高铁、公路汽车、施工等引起的环境振动问题日益突出,此类振动会对人的身心健康、高精密仪器正常工作、古建筑等产生不利的影响,为此,本文对现有的微振动控制技术进行研究。
关键词:微振动;控制技术;振动传播;减隔振1引言微振动往往是通过振动波的形式进行传递,要解决微振动引起的问题,必须先研究清楚振动波的传播机理,了解振动波的传播特性,从而为减隔振技术的提出提供理论支持。
2振动波的传播机理研究关于振动波的研究,国内外研究人员大都采用理论推导和解析模型,研究微振动的传播规律,主要包括场地土的动力特性及其对振动波传播的影响、振动传播途径等。
英国的Kryiov教授根据弹性半空间地基土在垂向简谐点荷载作用下的反应,建立了轨道交通引起的地面振动理论模型;J.Melke和S.Kraemer[1]讨论了一种通过使用诊断性测量技术调查城市铁路振动的方法,该方法可以形成一个有用的补充经验和分析振动预测模型的参考;Y.Okumura和K.Kuno[2]通过使用Hayashi的I型量化方法,研究了影响铁路噪声和振动的各种因素,研究发现:轨道的距离和铁路结构对振动峰值和噪音的产生影响结果相似;Sheng X和Jones等研宄了一种用于计算通过铁路轨道结构施加的静止振荡载荷,该载荷并在地面上的振动传播的模型,该模型包括一个轨道结构和放置在地面上由无数个平行的均质弹性层组成,研究了两种不同的地面模型,两个例子都显示轨道结构对振动传播的振幅和指向性的强烈影响,特别是在靠近轨道的区域。
Adam等利用有限元法和边界元法分别建立了一个二维的土壤-结构系统,采用了时域耦合边界元-有限元算法,研究了沟渠及其回填材料的几何和材料特性对结构响应的影响;Celebi等为了研究与火车通过引起的轨道和底土中的波传播有关的问题,分析讨论了两种数值模型,用来分析由作用在均质或分层半空间表面的移动载荷引起的铁路线附近自由场的三维动态响应;蒋通等通过研究某高架交通线路,引起的环境振动实况、发生机理及振动传播规律,提出了预测线路振动振级的统计回归公式,并进行了验证。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第28卷第3期振动与冲击JOI7RN^f.OFVIBRATIONAND.qHOCK振动控制技术现状与进展陈章位,于慧君(浙江大学流体传动及控制国家重点实验室,杭州310027)摘要:总结了白20世纪40年代开始振动试验研究以来振动控制技术的发展,论述了在振动控制算法以及振动试验激振设备等方面周内外研究所取得的主要成就。
在此基础上提fi{r振动控制技术今后值得父注的研究方向和重点,如实际振动环境复现试验控制、多轴多自由度振动控制等。
关键词:振动控制;振动试验;进展;展望中图分类号:TB534+.2文献标识码:A自从在二次世界大战中战斗机等多种军用设备因受振动而造成损坏的现象引起重视后,为了更好地模拟产品的真实振动环境、对产品可靠性进行检验,20世纪40年代开始人们引入了振动试验。
随着现代科学技术的进步,振动试验在产品的生产、设计以及可靠性、耐久性试验方面起到了越来越重要的作用。
振动试验系统主要由激振器、控制器、试件以及夹具所组成。
在这几十年来的发展中,为了更真实地模拟实际的振动环境,激振器越来越复杂,同时也带来了问题就是如何精确地控制激振器使得激振器产生的振动信号能够与试验要求产生的信号一致,也即需要进一步提高控制器的性能。
由此本文从三方面对振动控制技术进行综述,一是当前振动试验激振设备的发展;二是当前振动控制算法的发展以及在当前的振动试验产品中普遍采用的控制算法:三是当前控制器的发展,在此基础上提出了振动控制技术今后的研究方向和重点。
1国内外进展1.1振动试验激振设备进展用于振动试验的振动试验激振设备从其激振方式上主要可分为三类:机械式振动台、电液式振动台和电动式振动台¨“1。
1.1.1机械式振动台进展机械式振动台主要有不平衡重块式和凸轮式两类。
不平衡重块式是以不平衡重块旋转时产生的离心力来激振振动台台面,激振力与不平衡力矩和转速的平方成正比。
这种振动台可以产生正弦振动,其结构简单,成本低,但只能在约5Hz一100Hz的频率范围工作,最大位移为6mm峰-峰值,最大加速度约10g,不能进行随机振动。
凸轮式振动台运动部分的位移取决于凸轮的偏心收稿日期:2008-01-03第一作者陈章位男,教授,1965年生量和曲轴的臂长,激振力随运动部分的质量而变化。
这种振动台在低频域内,激振力大时,可以实现很大的位移,如100mm。
但这种振动台工作频率仅限于低频,上限频率为20Hz左右。
最大加速度为3g左右,加速度波形失真很大。
机械式振动台由于其性能的局限,主要应用于要求不高的领域。
1.1.2电动振动台进展电动式振动台是目前使用较广泛的一种振动试验激振设备。
它的工作原理是:根据电磁感应原理设计的,当通电导体处在恒定磁场中将受到力的作用,当导体中通以交变电流时将产生振动。
振动台的激励线圈正是处在一个高磁感应强度的空隙中,需要的振动信号从信号发生器或振动控制器产生并经功率放大器放大后通到激励线圈上,使得振动台产生需要的振动波形。
电动式振动台的频率范围宽,小型振动台频率范围为0Hz一10kHz,大型振动台频率范围为0Hz~2kHz;动态范围宽,易于实现自动或手动控制;加速度波形良好,适合产生随机波形。
因此目前主要应用于高频率范围、推力较小、波形失真要求较高的试验领域。
虽然目前电动振动台在推力方面已经做得越来越大,已经可以达到35t的推力,但是当它的推力超过10t以后,前述的电动振动台优势不是很明屁,各种因素的干扰也越来越大,而且成本增加很多。
同时由电动式振动台的工作原理所决定,在振动试验的过程中,它的台面上不可避免会产生漏磁现象,这对于某些军用产品的试验是不可行的。
因此,在这些情况下需要用电液振动台来进行试验。
1.1.3电液振动台进展电液式振动台作为振动试验的常用设备之一。
它的工作方式是采用电液伺服阀,通过液压控制传动装置产生振动激励。
输入的电控信号经放大器放大进入伺服阀,伺服阀把与输入信号成比例的液压油输入液压缸,以驱动活塞并带动台面运动。
万方数据74振动与冲击2009年第28卷电液振动台能产生很大的激振力和速度,如对较小的试件激振力可高达36287kg,速度可达9m/s,而且在低频的时候以可以得到很大的激振力。
大激振力的电液式振动台比相同推力的电动式振动台价格便宜,尤其在激振力大于4536kg后,电液振动台和电动式振动台的价格会相差很多。
在位移方面,电液式振动台可以从25mm到6m,而普通的电液振动台的行程范围是51mm到152mm。
电液式振动台的使用频率范围可达到0Hz~l000Hz,推力可达数百吨或T.吨以上。
电液振动台的这些优势使得它在振动试验中发挥着重要作用,尤其是在汽车行业、工程机械、装甲车以及船舶等行业具有广泛的应用前景。
同时由于近年来更多的振动试验要求对结构或建筑物进行足尺试验,这也离不开电液振动台。
但电液振动台和电动振动台相比,高频性能较差、上限]二作频率低、波形失真较大,不过近年来,随着控制技术的发展。
液压伺服阀等关键器件的发展,电液式振动台的频率范嗣有了很大的提高,同时波形失真减小。
如美国TEAM公司的电液式振动台的频率范围可达1000Hz,失真度几乎与电动式振动台一样。
同电动式振动台一样,近年来电液振动台也大力发展多轴多自由度的振动台,在国外建立了很多的三向六自由度电液振动台,其中部分是经过对单向电液振动台进行改造而建成的。
而国内在电液振动台建造上目前还有一些关键技术没解决,如频率范围,国内做到100Hz就相当困难。
而且在控制方式上,国内还基本采用模拟控制,国际上已采用全数字式控制方式。
因此国内高性能电液振动台全部依靠进口。
1.1.4多轴振动试验激振设备进展多轴振动激励装置主要有两大类,一类是多点激励装置,一类是多轴振动台。
到目前为止已研制成功的多轴振动激振设备均是由多个单轴振动台(或作动器)组装而成的,这样做的一个显著优点是可以充分利用单轴振动台的成熟技术,从而降低系统造价"J。
根据所用单轴振动台的类型不同,多轴振动激励装置可以划分为电液式和电动式两类,前者主要用于低频振动试验,频率范围大多在100Hz以下,后者则用于中高频振动环境试验,频率范同一般为5Hz~2000Hz。
电液式多轴振动台的实现相比电动式容易,造价相对较低,同时它也具有电液式单轴振动台的优点。
其结构形式有两轴平移、i轴平移和i向六自由度等几种类型。
电动式多轴振动台的种类较少,目前只有三向平移和三向六自由度两种类型。
1.2振动控制进展为了实现较高精度的振动控制,在保证振动激振设备的性能的同时,控制器性能的好坏起了很重要的作用。
1.2.1振动控制算法进展目前振动试验主要有正弦振动试验、正弦加随机振动试验、随机振动试验、冲击响应谱振动试验、典型冲击试验、以及时问历程复现试验。
其中正弦定频试验,用于检验某些零部件及设备等工作在某个或几个激励频率下时其抗振以及耐振的能力。
针对正弦振动试验,通常采用如图1所示的控制方式16J。
图1台面幅频特性实验结果随机振动试验实际上是一种宽带随机振动试验。
它的目的是检验产品、设备和工程等的耐随机振动的能力,考核试验对象在振动环境应力下的性能及表现。
发现它们的设计缺陷,从而改进设计,提高性能和质量。
在试验过程中连续地输出随机的激励信号来控制振动台的T作,振动台在激励信号的激励作用下,其响应的功率谱密度必须符合目标谱的定义。
目前广泛采用的是频谱均衡的控制方式。
该方法是一种闭环振动控制方式同时也是一种频域复现控制方式。
它在试验台架上施加随机载倚,使所加载荷的功率谱与真实载荷的功率谱相同。
试验台由计算机控制,计算机按给定的功率谱,并按随机相位产牛随机信号,通过数字均衡实现频域的模拟。
其实现原理如图2所示¨J。
图2台面幅频特性实验结果该方法计算简单,能保证实时性,因而得到了广泛的应用,但是它对于所实现的随机信号有一定的限制,通常是服从高斯分布的平稳随机信号。
美国DP公司提出了一种基于连续卷积的新型随机振动试验控制算法‘引,该方法通过对每次闭环控制万方数据第3期陈章位等:振动控制技术现状与进展75所获得的单帧激励信号与不断更新的系统逆传递函数进行连续卷积运算产生平滑连续的驱动信号。
该方法与频谱均衡法的主要不同是不需要进行随机相位调制和时域随机化。
应用于DP和MP公司的振动控制器中,得到了很好的控制效果。
除了在目前振动试验控制器中广泛采用的上述两种算法外,国内外很多学者都为进一步改进随机振动控制的控制效果进行了广泛和深入的研究一。
1¨。
随着对随机振动试验研究的深入,研究人员发现随机振动试验在某些试验的情况下试验结果的有效性存在问题,因为它是建立在复现随机信号的功率谱密度的原则上。
因此近年来,研究人员逐渐认识到了随机振动试验的局限性,同时随着振动试验的广泛应用对控制系统提出了更高的要求,因此提出了时间历程复现振动试验∞’12J。
它常被用于模拟汽车、船舶等交通工具在行驶过程中所受到的振动激励以及飞机在着陆时受到的振动激励,通常它的目标信号是通过数学模型产生或者是通过实际采集得到的振动信号,它的试验目的是复现目标信号的时域波形。
早期的时间历程复现试验采用迭代控制方式013,14j,即用人工产生或实际激励记录到的信号通过电液振动台对被试验对象进行激励,以识别整个试验系统的响应与激励之间的频率响应关系,即系统的传递函数。
然后根据期望的响应信号和系统的传递函数,计算初始驱动信号。
用该驱动信号激振,同时回收期望响应点的响应信号,根据系统的传递函数和误差信号进行迭代,修正驱动信号。
利用迭代获得的满足精度要求的激励信号直接驱动电液振动台,开始正式的振动试验。
在试验过程中,仅仅将驱动信号重放出来即可。
以迭代控制方法为基础,为提高控制性能,进一步提出了改进的迭代控制方法L15'16J。
但是这些控制方式都是一种开环控制,在试验的过程中,对系统特性的变化不能进行实时修正,因此试验精度低,同时对于长时间历程的复现,在预试验阶段计算振动台的驱动信号时所花费的时间较多,提高了试验成本。
近年来DACTRON、DP和MP公司都开发出了闭环控制的方式进行长时间历程复现,提高了试验精度‘肛191。
正弦加随机振动试验,用于在规定的频率范围内,在宽带随机振动的基础上叠加若干规定量值的频率可变的正弦振动,如对直升飞机的振动环境以及火炮发射时所产生的振动。
目前国内外通用的正弦加随机振动试验控制算法是旧。
加1:首先,把通过加速度传感器获得的正弦加随机振动试验信号分离出正弦信号的幅值以及随机信号;其次,分别根据正弦振动试验以及随机振动试验控制算法进行均衡控制;均衡后获得的激励信号根据线性叠加原理重叠输出,通过功率放大器驱动振动台工作:如此往复,进行闭环控制。
在这个控制算法中,正弦信号和随机信号通常采用跟踪滤波的方法进行分离。