马铃薯收获机设计毕业设计
振动式马铃薯收获机的设计
摘要马铃薯在16世纪初传入我国,马铃薯的养分丰厚,种植面积很大,人们把它和小麦、稻谷、玉米一同被人称为世界四大粮食作物,拥有着极大的市场潜力。
就国际环境来看的话,大约有超过四成的土豆也就是马铃薯会进行食品加工,加工后的食品将流入各种消费市场针对不同的消费人士。
在国内,很少有人认为马铃薯是一种非常受欢迎的农作物,在这几年也受国外快餐行业的影响,快速的流行了起来。
油炸薯片或从各种渠道进口的膨化食品也来纷至沓来。
在田间收获马铃薯时,必须将土壤中的土豆去除并收集起来。
在我国,尽管马铃薯的机械化开始了急速发展,然而在现如今的块茎收获行业上,马铃薯收获机的作业效率难符人意,最主要的就是挖掘装置的挖掘效率不高,既浪费时间又浪费人力资源。
由于传统的马铃薯收获机作业效率不高,在进行完挖掘工作后很多时候需要人进行二次收获过程,浪费了大量的人力物力,并且容易出现如适应性差、损伤率高及壅土等问题。
受此现实的影响,该项目为小型家用通用便携式振动土豆收获机设计了一套设计方案。
该马铃薯收割机设计小巧,重量轻,结构简单,制作成本也较低,马铃薯采矿效率高。
只需要小型拖拉机来进行牵引,并且马铃薯收获可以很好地进行本课题所设计的振动式马铃薯收获机并非专用的大型联合收获机,而是更加符合国情的家用的常用的机械设备,是针对能够提高马铃薯的挖掘收获作业效率而设计出来的。
可以有效的使原先低下的收获效率得到明显的进步;就可以达到无需人力物力进行二次收获、同时也就达到了节约时间的目的。
本文选题的主要内容是振动土豆收获机。
主要通过对已知数据的计算和分析,示范和比较以及程序的选择,完成了振动土豆收获机的完整设计。
同时利用解析法,分析计算了振动原理,设计计算了分离装置以及选择出一个最佳的传动方案。
在这些步骤后,振动马铃薯收获机选定主题的说明机架尺寸、动力输入轴、振动装置以及传动比等进行了完整的的计算说明。
关键词:振动式;挖掘;马铃薯;根茎收获机AbstractPotatoes into China in the early 16th century, nutrient rich potato, planting area is large, people put it together with wheat, rice, corn, known as the four major food crops, has great market potential. The nutritional value of potatoes is very high. As far as the international environment is concerned, more than 40% of the potatoes are processed by the potato, and processed food will flow into various consumer markets for different consumers. At home, few people see the potato as a very popular food crop, which has been affected by the foreign fast food industry in recent years. In major cities such as Beijing, Shanghai, guangzhou and xi 'an, McDonald's and Kentucky Fried chicken, mainly potato chips and mashed potatoes, account for half of the country's fast food market. Other Fried potato chips or puffed food imported from various sources are also coming. When harvesting potatoes in the field, potatoes must be removed and collected.In our country, although the potato mechanization began rapid development, however, in today's tuber harvest on the industry, the efficiency of potato harvester difficult operators, the main device is mining the mining efficiency is not high, is a waste of time and waste of human resources. Because of the traditional potato harvester working efficiency is not high, after excavation in most of the time needed for second harvest process, waste a great deal of manpower, and prone to such as poor adaptability, high damage rate and heapsoil problem. Influenced by this reality, the project designed a design scheme for small household portable vibrating potato harvester. The potato harvester is small in design, light in weight, simple in structure, low in cost and high in mining efficiency. Only small tractors are needed for traction, and potatoes can be harvested well.This topic designed by vibrating the potato harvester of large combined harvester is notspecial, but is more in line with the national conditions of household of commonly used machinery and equipment, is for designed to improve the efficiency of potato harvest of mining operations. It can effectively make the original low efficiency gains obvious progress; We can achieve the goal of saving time without the need of manpower and material resources. The main content of this paper is vibrating potato harvester. Through the calculation and analysis of the known data, demonstration and comparison and the selection of the program, the complete design of the vibrating potato harvester was completed. At the same time, the analytical method is used to analyze the vibration principle, the separation device is calculated and the optimal transmission scheme is selected. After these steps, a complete calculation description of the frame size, power input shaft, vibration device and transmission ratio of the selected theme of the vibrating potato harvester was carried out.Key words: vibration; Mining; Potato, rhizome harvester.目录引言 (1)第一章绪论 (2)1.1 选题研究的意义 (2)1.2 国内外马铃薯收获机的发展情况 (2)1.3 国内外马铃薯收获机存在的缺点与不足 (4)1.4 研究的内容和方法 (6)1.5 预期目标 (6)1.6 重点研究的关键问题及解决思路 (6)1.7 工作条件及解决方法 (7)第二章振动式马铃薯收获机总体设计 (8)2.1 收获机的典型方法和方案选择 (8)2.2 振动式马铃薯收获机的振动工作原理 (8)2.3 整机主要的技术参数 (8)第三章整机关键部件结构设计 (10)3.1牵引架设计 (10)3.2振动分离筛设计 (10)3.3挖掘铲的结构设计 (10)第四章振动装置运动学分析 (11)4. 1挖掘铲、振动分离筛机构运动学分析 (11)第五章动力装置的设计与选用 (14)5.1 传动系统的确定 (14)5.2 偏心轮和连杆机构设计 (17)5.3 轴的设计与校核 (17)5.4 键的校核 (24)总结 (25)致谢 (26)参考文献 (27)引言本课题所设计的振动式马铃薯收获机并非专用的大型联合收获机,而是更加符合国情的家用的常用的机械设备,是针对能够提高马铃薯的挖掘收获作业效率而设计出来的。
马铃薯联合收获机控制系统设计

马铃薯联合收获机控制系统设计1. 引言1.1 研究背景马铃薯是我国重要的农作物之一,其种植面积和产量均位居世界前列。
传统的人工收获劳动强度大、效率低的问题已经成为制约马铃薯产业发展的瓶颈之一。
研究马铃薯联合收获机控制系统设计具有重要的现实意义和实际价值。
针对当前马铃薯产业的现状和需求,本研究旨在设计一套可靠、高效的马铃薯联合收获机控制系统,通过对系统硬件和软件的设计优化,实现对马铃薯联合收获机的智能化控制和全面监测,提高作业效率和准确性,推动马铃薯产业向着智能化、现代化的方向发展。
1.2 研究目的马铃薯联合收获机控制系统的研究目的是为了提高马铃薯收获的效率和质量,降低劳动力成本,并减少人为操作误差所带来的损失。
通过设计一个高效可靠的控制系统,可以实现对收获机的精确控制,使其在不同地形和环境条件下能够稳定运行,实现更加高效的收获作业。
研究马铃薯联合收获机控制系统也有助于推动农业机械化水平的提升,促进农业生产方式的转变,提高农业生产效益,为农业现代化发展做出贡献。
从长远来看,研究马铃薯联合收获机控制系统的目的是为了推动农业科技的进步,提高农业生产的智能化、信息化水平,推动农业现代化建设,促进农业可持续发展。
1.3 研究意义马铃薯是我国重要的粮食作物之一,其产量不断增加,但是传统的人工收获方式效率低下,费时费力。
研究马铃薯联合收获机控制系统设计具有重要意义。
将现代化技术引入到马铃薯收获中,可以提高收获效率,降低劳动强度,节约人力成本。
通过控制系统实现对收获机械设备的智能化操作,可以提高马铃薯的质量和产量,保障粮食安全。
马铃薯联合收获机控制系统设计的研究对于推动农业机械化、智能化发展具有重要意义,有利于提高农业生产效率,推动农业现代化进程。
研究马铃薯联合收获机控制系统设计具有重要的理论和实践意义,对于推动农业生产方式转变,促进现代农业发展具有重要意义。
2. 正文2.1 控制系统设计方案控制系统设计方案是马铃薯联合收获机控制系统的核心部分,其设计的合理与否直接影响到整个系统的性能与稳定性。
毕业设计--马铃薯收获机的设计

1马铃薯收获机的分析1.1 马铃薯收获机研究的目的和意义马铃薯是我国继小麦、水稻、玉米之后的第四大作物,主要分布在黑龙江、新疆、甘肃、内蒙、山西、陕西、宁夏、云南、贵州、青海、吉林等省区,年产鲜薯近6000多万吨。
我国马铃薯种植面积以10 万hm2/年的增长速度逐年增加,2001 年达到472 万hm2,产量居世界第1 位[1-2]。
我国是马铃薯生产第一大国,但却是马铃薯成果转化比较差的国家。
据联合国粮农组织报告,我国马铃薯平均产量仅为13.9t/hm2,而欧美发达国家平均单产35~43t/hm2。
世界马铃薯中心的研究表明:在世界范围内对马铃薯的需求到2020年将有望增长20%,超过水稻、小麦、玉米的增长。
届时发展中国家对马铃薯的需求将是2000 年的2 倍[3-5]。
随着市场对马铃薯需求的不断增加,国外一些大公司纷纷在中国从事马铃薯生产与加工业务,国内一些生产企业也纷纷加入这一领域,使得马铃薯生产开始向生产基地规模化、标准化迈进[6]。
然而,一个残酷的现实却是,占生产总用工70%以上的马铃薯收获作业至今基本上还是停留在传统的人工割秧、镐头刨薯、人工捡拾的阶段,严重影响了马铃薯的规模生产,使之远远满足不了市场的需求。
伴随种植面积和产量的增长,马铃薯收获成为一个重要的研究课题。
国内外对马铃薯收获机械研究投入了相当大的人力和物力。
我国现阶段的马铃薯收获机还是以简单挖掘人工拣拾为主。
而国外已经实现了机械化与自动化的结合,将液压技术、振动分析、电子技术、传感器技术应用于作业机械中,大大地降低了劳动者的工作强度。
1.2 国外马铃薯收获机的发展现状国外马铃薯收获机械化收获起步早、发展快、技术水平高。
20世记初,欧美国家出现畜力牵引挖掘机来代替手锄挖掘马铃薯、随后改由拖拉机牵引或悬挂。
20年代末出现了升运链式和抛掷轮式马铃薯收获机。
在20世纪40年代初,前苏联、美国就开始研制、推广应用马铃薯收获机械,50年代末即己实现了机械化。
马铃薯联合收获机毕业设计论文
摘要马铃薯是一种世界性经济作物,是继小麦、水稻和玉米之后的第四位重要粮食作物。
随着市场对马铃薯需求的不断增加,马铃薯的产业化,机械化种植、收获、深加工机械已经成为各国的重要课题。
据统计2006年全世界马铃薯种植面积约为2000万hm2,其中我国的种植面积达501.53万hm2,随着我国马铃薯种植面积和总产量均跃升至世界首位,我国家也成为世界上马铃薯消费增长最快的国家之一。
但是在我国大部分地区占生产总用工70%以上的马铃薯收获作业至今基本上还是停留在传统阶段(主要靠人畜力,小面积收获常采用铁锨或锄头人工挖掘,较大面积收获采用畜力挖掘犁)许多地区的机械化收获水平较低严重影响了马铃薯的规模生产,使之远远满足不了市场的需求。
近年来,马铃薯收获机械的研制与推广有了较大发展,但目前国内机型以小型、配套动力小,结构简单、轻便为主,大多属于条铺式,即将薯块翻出地面后人工捡拾,生产效率低,劳动强度仍较大,且总体机械化水平很低,严重制约着马铃薯产业的进一步发展。
研制机具的技术水平也与国外相差甚大,劳动强度还是较大,严重制约了马铃薯产业化的发展。
因此,为了适应发展的要求,本文通过对目前马铃薯收获机械的了解,设计了一种马铃薯联合收获机,集挖掘、分离、输送、分级、清选、为一体的单行马铃薯联合收获机。
这种新型的的马铃薯联合收获机分离装置采用了弧形拨齿式分离装置。
这种装置结构简单,分离效果好,克服了抖动链式和筛式分离装置在小型马铃薯收获机械上和中粘性土壤中使用的限制,提高了土薯分离效率。
大大减小了劳动强度,提高了生产效率。
关键词:马铃薯;联合收获机;分离装置;分级装置;传动系统AbstractWith the market demand for potatoes continuously increased,it’s industrialization and mechanization planting,harvesting,deep processing mechanism become an important subject in different countries.According to statistics,the world’s potatoes planting area is about 20 millionhm2in 2006,in which our countries planting area reached 5.0153 million hm2,with the potatoes planting area and the total yield all jumped to the first place in the world,our country become one of the quickest growing potato’s consumer in the world.But in the most areas of our country, there are more than 70%total work of the potatoes harvesting are basically stopped in the traditional artificial seeding cutting,digging,picking stage,the level of mechanization of harvest in some areas relatively low,it’s seriously influence the potato es scale production and make it far not meet the demand of the market.In recent year,the research and extension of the potato harvest machinery has made a great development,but at present,our machine type mainly in small type,small mating power,simple structure and light.There is a big gap between our country and foreign country about the technology level of the equipment research,the labor intensity is still great,they are seriously hold back the potatoes industrial development.So in order to adaptation the globe and international competition,through the comprehensive research on the present potatoes harvestmachinery at home and abroad,we improved the design of a new type single lined potato’s combine harvest,which integrated the digging,separation,transportation,grading,cleaningselecting,bagging(boxing)in one machine.After improved the design of the potato combine harvester,which separating device used the arc round roller components.This device has simple structure and good separation,overcome the restriction of the jitter chain and screen type separation,that in small type potatoes harvest machine and the use in viscous soil,improve the separationefficiency.The grading device’s improve is mainly used the first order and the second order grading mechanism which composed of cylindrical roller and semi lunar groove had different space,realized the big,medium,small potatoes grading and transportation,greatly reduced the labor intensity and improved the product efficiency.After determined the whole improving design scheme,using the CAXA software built the integral three-dimensional modeling and make the motion simulation to the grading deviceing the ADAMS software,analysis the all level potatoes simulated motion situation,verify the feasibility and reliability of the design and proposed the improving suggestion according to the simulation results.Keywords:potato;combine harvester;separating device;grading device;transmission syste目录摘要 (1)Abstract (2)第1章绪论 (6)第1章绪论 (6)1.1 前言 (6)1.1.1马铃薯种植概况 (6)1.1.2马铃薯机械化收获技术与收获机具 (7)1.2 国内外马铃薯收获机概况及发展现状 (7)1.2.1 国外马铃薯收获机的发展现状 (7)1.2.2 国内马铃薯收获机的发展现状 (9)1.3 本课题研究的意义、内容及方法 (12)1.3.1 研究意义 (12)1.3.2 研究内容 (14)1.3.3 研究方法 (14)第2章马铃薯收获机的总体原理及挖掘部分设计 (15)2.1马铃薯的生长农艺特征及收获要求 (15)2.1.1 马铃薯的生长农业特征 (15)2.1.2 收获要求 (15)2.2马铃薯收获机的整机机构及工作原理 (16)2.3 辊式摘穗器原理及参数................................................................................. 错误!未定义书签。
马铃薯收获机械的设计学士学位论文
1马铃薯收获机的分析1.1马铃薯收获机研究的目的和意义马铃薯是我国继小麦、水稻、玉米之后的第四大作物,主要分布在、、、蒙、、、、、、、等省区,年产鲜薯近 6000多万吨。
我国马铃薯种植面积以 10 万 hm2/年的增长速度逐年增加,2001 年达到 472 万hm2,产量居世界第 1 位[1-2]。
我国是马铃薯生产第一大国,但却是马铃薯成果转化比较差的国家。
据联合国粮农组织报告,我国马铃薯平均产量仅为 13.9t/hm2,而欧美发达国家平均单产 35~43t/hm2。
世界马铃薯中心的研究表明:在世界围对马铃薯的需求到2020年将有望增长 20%,超过水稻、小麦、玉米的增长。
届时发展中国家对马铃薯的需求将是 2000 年的 2 倍[3-5]。
随着市场对马铃薯需求的不断增加,国外一些大公司纷纷在中国从事马铃薯生产与加工业务,国一些生产企业也纷纷加入这一领域,使得马铃薯生产开始向生产基地规模化、标准化迈进[6]。
然而,一个残酷的现实却是,占生产总用工 70%以上的马铃薯收获作业至今基本上还是停留在传统的人工割秧、镐头刨薯、人工捡拾的阶段,严重影响了马铃薯的规模生产,使之远远满足不了市场的需求。
伴随种植面积和产量的增长,马铃薯收获成为一个重要的研究课题。
国外对马铃薯收获机械研究投入了相当大的人力和物力。
我国现阶段的马铃薯收获机还是以简单挖掘人工拣拾为主。
而国外已经实现了机械化与自动化的结合,将液压技术、振动分析、电子技术、传感器技术应用于作业机械中,大降低了劳动者的工作强度。
1.2国外马铃薯收获机的发展现状国外马铃薯收获机械化收获起步早、发展快、技术水平高。
20世记初,欧美国家出现畜力牵引挖掘机来代替手锄挖掘马铃薯、随后改由拖拉机牵引或悬挂。
20年代末出现了升运链式和抛掷轮式马铃薯收获机。
在20世纪40年代初,前联、美国就开始研制、推广应用马铃薯收获机械,50年代末即己实现了机械化。
70~80年代,德、英、法、意大利、瑞士、波兰、匈牙利、日本和国亦相继实现了马铃薯作物生产机械化。
马铃薯联合收获机械原理方案设计
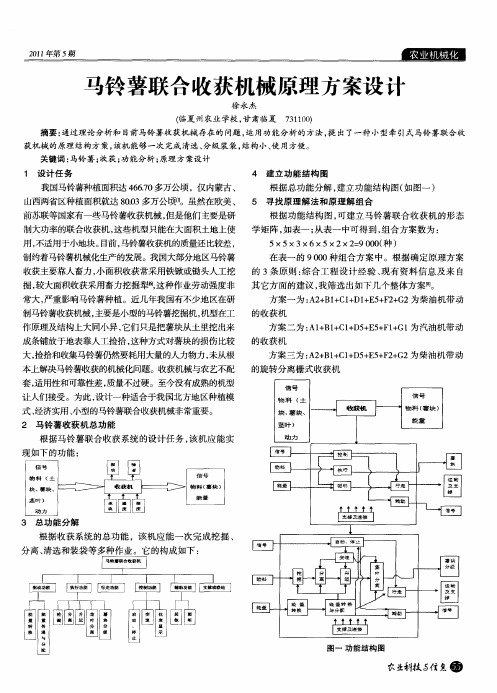
3 总 功 能分 解
根据收获 系统 的总功能 ,该机应能一 次完成挖掘 、 分离、 清选和装袋等 多种作业 。它 的构成 如下 :
图 一 功 能 结构 图
农 射 往是@ 业 技5
2 1 年第 5 01 朝
表~
马铃薯联合收获机形态学矩 阵
保证土垡能沿铲 面顺 利通过 。因此 , 选用 “ 固定 式挖掘
驱动式挖掘器 除有前进运动外 , 还有 回转运 动或往 式等翻 。 6 . 抖动链式输送分离器 .1 2 它 由抖动链 、 抖动轮及 主、 从动链轮组成。抖动链式 行分 离的。夹杂物 、 土块和小石 子等从抖动链 的杆条 中 盘式挖掘器 。 动式挖掘铲工作时 由曲柄这种机构驱动 振
阶段 。 试验表明 , 振动铲与 固定式挖掘器相 比, 它对薯块
关键词 : 马铃 薯 ; 收获 ; 能分析 ; 功 原理 方案 设计
1 设计任务
4 建 立功 能 结 构 图
我国马铃薯种植面积达 4 6 0 6. 多万公顷,仅内蒙古、 7
山西两省 区种植面积就达 8. 多万公顷I 03 0 I I 。虽然在欧美、
根据 总功能分解 , 建立功能结构 图( 图一 ) 如
现如下的功能 :
信 号
在表一的 9 0 种组合方案 中。根据确定原理方案 0 0
的 3条原则 : 合工程设 计经验 、 综 现有 资料信 息及 来 自
方案一为 : 2 B + I D + 5 F + 2为柴油机带动 A + I C + IE + 2 G
的收 获 机
掘, 较大面积收获采用畜力挖掘犁[这种作业劳动强度非 其它方面的建议 , 6 1 , 我筛选 出如下几个整体方案嘲 。
方案二为 : I B + ID + 5 F + 为汽油机带动 A + IC + 5 E + IG1 的收获机 方案三为 : 2 B + ID + 5 F + 2 A + IC + 5 E + 2 G 为柴油机带 动
马铃薯联合收获机控制系统设计

马铃薯联合收获机控制系统设计1. 引言1.1 研究背景马铃薯是世界上最重要的粮食作物之一,其种植面积和产量在全球范围内都居于前列。
随着农业机械化水平的不断提高,马铃薯联合收获机的使用也越来越普遍。
马铃薯联合收获机可以提高收获效率,减少人力成本,缓解人力短缺的问题,是现代农业生产中不可或缺的重要工具。
目前市场上存在的马铃薯联合收获机在控制系统方面还存在许多不足之处,如传感器系统设计不够灵敏、电气控制系统设计不够稳定、机械控制系统设计不够精准等问题。
对马铃薯联合收获机的控制系统进行深入研究和优化设计具有重要意义。
本文旨在通过对马铃薯联合收获机控制系统的设计和改进,提高其生产效率和稳定性,为农业生产提供更好的支持。
通过研究控制系统的优化设计,可以为农业机械化发展提供新思路和方法,具有积极的推动作用。
1.2 研究目的研究目的是为了设计一套高效、精准的马铃薯联合收获机控制系统,以提高收获效率、减少劳动力成本和提升收获品质。
通过引入先进的传感器技术和电气控制系统,实现对马铃薯联合收获机各部分的实时监控和控制,从而提高作业效率和减少浪费。
通过机械控制系统的设计和优化,实现对马铃薯的轻柔收获,减少土壤破坏和损伤率,提高产品的市场竞争力。
数据处理与通讯系统的设计将实现数据的及时传输和分析,为决策提供支持,提高生产管理的效率和精准度。
通过本研究的开展,旨在为农业生产提供先进的技术支持,促进农业现代化进程,为农民增加收入、改善生产条件,推动农业可持续发展。
1.3 研究意义马铃薯联合收获机控制系统的设计与研究意义在于提高农业生产效率,降低劳动强度,减少人力资源消耗,增加农民收入。
随着农业现代化的发展,马铃薯生产规模不断扩大,传统的人工收获方式已无法满足需求。
研究马铃薯联合收获机控制系统,对提高马铃薯的生产效率和质量具有重要意义。
马铃薯联合收获机控制系统的设计可以实现自动化收获、高效能作业,最大限度地减少因人为操作而引起的误差。
马铃薯收获机课程设计
马铃薯收获机课程设计一、课程目标知识目标:1. 学生能理解马铃薯收获机的结构组成及其工作原理;2. 学生能掌握马铃薯收获机的操作步骤和安全注意事项;3. 学生了解马铃薯收获机在农业生产中的应用及其优点。
技能目标:1. 学生能正确操作马铃薯收获机,完成马铃薯的收获作业;2. 学生具备对马铃薯收获机进行简单维护和故障排除的能力;3. 学生能够分析马铃薯收获机在不同作业环境下的适用性。
情感态度价值观目标:1. 培养学生对现代农业机械化的兴趣,激发他们学习农业科技的积极性;2. 增强学生的团队合作意识,培养他们在实际操作中互相协作、共同完成任务的能力;3. 培养学生的安全意识,使他们重视农业生产中的安全问题,养成良好的操作习惯。
课程性质:本课程属于农业机械操作与维护的实践课程,注重理论联系实际,强调学生的动手操作能力。
学生特点:学生为初中年级,具备一定的农业基础知识,好奇心强,动手能力强,但安全意识相对薄弱。
教学要求:结合学生特点,采用讲授、示范、实践相结合的教学方法,注重培养学生的实际操作能力,提高他们的安全意识。
通过本课程的学习,使学生能够掌握马铃薯收获机的操作技能,为今后从事农业工作打下坚实基础。
二、教学内容1. 马铃薯收获机的基本结构- 介绍收获机的各部件名称及功能;- 分析各部件在收获过程中的作用及相互关系。
2. 马铃薯收获机的工作原理- 深入讲解收获机的工作流程;- 探讨收获机如何实现高效、无损收获马铃薯。
3. 马铃薯收获机的操作与维护- 详细讲解收获机的操作步骤,包括启动、调整、操作和停止等;- 介绍收获机的日常维护和保养方法,强调注意事项。
4. 马铃薯收获机的安全操作- 分析收获机操作中可能存在的安全隐患;- 强调安全操作规程,教授学生如何避免事故发生。
5. 实践操作- 安排学生进行收获机的实际操作,包括启动、调整、收获等环节;- 指导学生进行收获机的维护和故障排除。
教材章节关联:本教学内容与教材中“农业机械及其应用”章节相关,着重讲解马铃薯收获机的结构、原理、操作、维护及安全等方面内容。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
题目:马铃薯秧蔓处理及收获联合作业机设计目录摘要 (I)Abstract ........................................................................................................................................... I I 1 绪论 (1)1.1马铃薯联合收获机研究的目的和意义 (1)1.2马铃薯收获机的国内外发展概状 (1)1.2.1国外发展概状 (1)1.2.2国内发展概状 (2)1.3本课题的研究内容及方法 (3)1.3.1研究内容: (3)1.3.2研究方法: (3)2 马铃薯联合收获机整体结构设计 (4)2.1方案论证 (4)2.2方案确定 (5)2.3马铃薯联合收获机的工作原理 (5)3 打秧装置的设计 (7)3.1打秧刀的设计 (7)3.1.1刀片类型的选择 (7)3.1.2刀片数量的确定 (9)3.1.3刀片排列方式的确定 (10)3.2打秧机壳形状的确定 (10)3.3打秧装置工作参数的确定 (11)4 挖掘装置的设计 (12)4.1挖掘铲的设计 (12)4.2铲架的设计 (15)5 分离装置的设计........................................................................................ 错误!未定义书签。
5.1抖动链类型的选择............................................................................ 错误!未定义书签。
5.2链条式抖动链的基本结构................................................................ 错误!未定义书签。
5.3 抖动链基本参数的确定................................................................... 错误!未定义书签。
5.4抖动链速度的确定及抖动轮参数设计............................................ 错误!未定义书签。
5.4.1抖动链的线速度...................................................................... 错误!未定义书签。
5.4.2抖动轮的设计.......................................................................... 错误!未定义书签。
5.5 从动轮的设计................................................................................... 错误!未定义书签。
6 传动系统设计............................................................................................ 错误!未定义书签。
6.1传动系统的确定................................................................................ 错误!未定义书签。
6.2各级轴的转速.................................................................................... 错误!未定义书签。
6.2.1输送链主动轴转速.................................................................. 错误!未定义书签。
6.2.2变速箱动力输出轴的转速...................................................... 错误!未定义书签。
6.2.3打秧刀轴的转速...................................................................... 错误!未定义书签。
6.2.3从打秧刀轴到抖动链主动轮中间链轮轴的转速.................. 错误!未定义书签。
6.3功率需求计算.................................................................................... 错误!未定义书签。
6.3.1挖掘部分功率消耗.................................................................. 错误!未定义书签。
6.3.2升运链功率消耗...................................................................... 错误!未定义书签。
6.3.3行走装置的功率消耗.............................................................. 错误!未定义书签。
6.3.4打秧装置的功率消耗.............................................................. 错误!未定义书签。
6.3.5总功率消耗.............................................................................. 错误!未定义书签。
6.4主要传动部件的设计........................................................................ 错误!未定义书签。
6.4.1打秧刀轴的设计...................................................................... 错误!未定义书签。
6.4.2抖动链主动轴的设计.............................................................. 错误!未定义书签。
6.4.3主动链轮的设计...................................................................... 错误!未定义书签。
7 结论和建议................................................................................................ 错误!未定义书签。
7.1结论:................................................................................................ 错误!未定义书签。
7.2建议:................................................................................................ 错误!未定义书签。
参考文献........................................................................................................ 错误!未定义书签。
致谢............................................................................................................ 错误!未定义书签。
球球:九一二八七九六一五马铃薯秧蔓处理及收获联合作业机设计摘要马铃薯收获需要的工作量大,而且马铃薯的需求量逐年增长,所以马铃薯收获的机械化的实现是现在一个重要课题。
马铃薯在挖掘收获以前,需要对地表的秧蔓进行处理,否则会造成机器的缠绕,增加功率的消耗。
现在常用的方法是提前用打秧机将秧蔓打碎,然后进行挖掘。
这样虽然可以防止缠绕,但是作业的效率低,影响了马铃薯收获的机械化水平。
结合我国马铃薯种植特点,设计了一种打秧挖掘联合作业机,可以一次性实现打秧和挖掘,减少了进地次数,提高了工作效率。
本结构采用普通拖拉机作为动力,结构紧凑,便于小型地块作业。
关键词:马铃薯收获机;秧蔓还田;挖掘;抖动链;球球:九一二八七九六一五Design of Small Sprouts-crashing and Digging Potato HarvesterAbstractPotato harvest is a very heavy work.We need more and more potato in the future.So the machanization of the harvest is an important project now.If the sprouts of the potato are not dealedbefore the harvest,the mechine is easy to be binded which will increase the consumtion of energy.So far,the nomal way we use to solve the problem is crashing the sprouts about ten days before digging work.But it waste a lot of time.So according to the planting way of our country,a sprouts-crashing and digging potato harvester is diseigned.This mechine an do sprouts-crashing and digging work at the same time.So the time we use to harvest the potato become less than before. Powered by a conmen tractor,this new potato harvester is convenient for working on pint-sized farm.Key words: potato harvester;sprouts-crashing,dig;vibrating chain1 绪论1.1马铃薯联合收获机研究的目的和意义我国马铃薯产量现居世界首位,种植面积在2001年已达到472万公顷,而且以每年十万公顷的增长速度逐年增长[1]。