慧鱼模型说明书
慧鱼robo使用说明

1简介----用ROBO PRO软件控制慧鱼模型 (3)1.1ROBO PRO软件的安装 (3)1.2安装ROBO接口板的USB驱动程序 (4)1.3第一步 (7)2编程前的硬件快速测试 (10)2.1接口板与电脑的连接 (10)2.2接口板的设置 (10)2.3错误连接:未与接口板连接? (12)2.4各部分都工作正常吗——接口板的测试- (12)3第一级:第一个控制程序 (14)3.1创建一个新程序 (14)3.2控制程序的模块 (15)3.3插入、移动和修改程序模块 (15)3.4连接各程序模块 (18)3.5对首个控制程序的测试 (19)3.6其他的程序模块 (20)3.6.1时间延迟 (20)3.6.2等待输入 (21)3.6.3脉冲计数 (21)3.6.4循环计数 (22)3.7在线和下载操作的差别 (22)3.8技巧和诀窍 (24)4第二级:运行子程序 (26)4.1第一个子程序 (27)4.2子程序库 (31)4.2.1子程序库的使用- (31)4.2.2你自己的子程序库的使用 (31)4.3编辑子程序代号 (32)5第三级:变量、控制板和指令 (34)5.1变量和指令 (34)5.2变量和多个流程 (35)5.3控制板 (36)5.4计时器 (39)5.5子程序指令输入 (40)5.6列表(阵列) (43)5.7运算器 ............................................... 446扩展接口板和多个接口板的控制 (48)6.1扩展接口板 (48)6.2多个接口板 (48)6.3子程序中的接口板分配 (50)6.4技巧和窍门 (50)6.5改变接口板的序列号或固件版本 (51)7程序模块的概述 (53)7.1基础模块(第一级) (53)7.1.1启动 (53)7.1.2结束 (53)7.1.3数字分支 (53)7.1.4模拟分支 (54)7.1.5时间延迟 (54)7.1.6电动机输出 (55)7.1.7灯输出(第二级) (56)7.1.8输入等待 (57)7.1.9脉冲计数器 (58)7.1.10循环计数器- (58)7.2子程序1/O(第2-3级) (59)7.2.1子程序进入(第二级) (59)7.2.2子程序退出(第二级) (59)7.2.3子程序指令的输入(第三级) (59)7.2.4子程序指令的输出(第三级) (60)7.3变量、序列......(第三级) (60)7.3.1变量(全局) (60)7.3.2局部变量 (61)7.3.3常数- (62)7.3.4定时器变量- (62)7.3.5序列 (63)7.4指令(第三级) (65)7.4.1=(赋值) (65)7.4.2+(加) (66)7.4.3– (减) (66)7.4.4向右 (66)7.4.5向左 (66)7.4.6停止 (66)7.4.7打开 (66)目录17.4.8关闭 (67)7.4.9文本 (67)7.4.10附加值 (67)7.4.11删除值 (67)7.4.12 交换值 (67)7.5比较,等待, ... (Level 3) (67)7.5.1判断(带数据输入) (68)7.5.2固定值的比较 (68)7.5.3比较 (68)7.5.4延时 (69)7.5.5等待.. (69)7.5.6脉冲计数 (70)7.6接口板的输入、输出- (70)7.6.1数字量输入 (70)7.6.2模拟量输入 (71)7.6.3红外输入 (72)7.6.4马达输出 (73)7.6.5灯输出 (73)7.6.6控制板输入 (74)7.6.7控制板输出 (75)7.7运算器 (75)7.7.1算术运算器 (76)7.7.2逻辑运算器 (76)8控制板模块和控制板:概述 (78)8.1显示 (78)8.1.1仪表 (78)8.1.2文本显示 (79)8.1.3指示灯 (80)8.2控制模块 (81)8.2.1按钮 (81)8.2.2滑块 (82)9绘图功能 (83)1简介---用ROBO PRO软件控制慧鱼模型你一定曾经问过自己,机器人是如何执行被分配的任务,看上去就象有一只无形的手在操纵它。
慧鱼机器人课程设计说明书
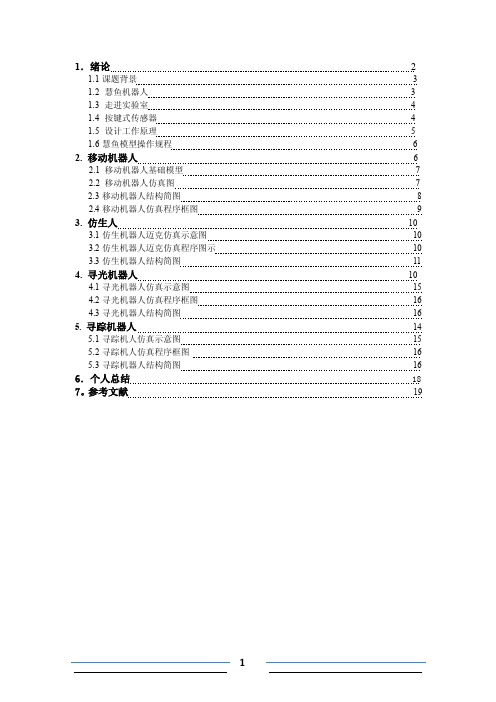
1.绪论 21.1课题背景 31.2 慧鱼机器人 31.3 走进实验室 41.4 按键式传感器 41.5 设计工作原理 51.6慧鱼模型操作规程 62. 移动机器人62.1 移动机器人基础模型72.2 移动机器人仿真图72.3移动机器人结构简图82.4移动机器人仿真程序框图93. 仿生人103.1仿生机器人迈克仿真示意图103.2仿生机器人迈克仿真程序图示103.3仿生机器人结构简图114. 寻光机器人104.1寻光机器人仿真示意图154.2寻光机器人仿真程序框图164.3寻光机器人结构简图165.寻踪机器人145.1寻踪机人仿真示意图155.2寻踪机人仿真程序框图165.3寻踪机器人结构简图16 6.个人总结18 7。
参考文献19摘要1.1课题背景由机器人的发展和快速广泛的被使用,可知科学家对于机器人的功能也相提高,除了超强的逻辑运算、记忆能力及具备类似的自我思考能力,另外在机器人的外表及内部结构,科学家更希望能模仿人类。
对于外在资讯的选集,也透过各种感应器,企图达到类似人类各种触觉的功能,选集了外在环境的资讯,一旦外在环境起了改变,机器人一定要能随着变化,做出该有的反应动作,更新自己的资料库,达到类似人类学习的功能。
移动式机器人形态分为车轮式、特殊车轮式、不限轨道式、不行式等,若是在平坦的地面上移动时,车轮式是最具效率的,不懂机构简单,且具实用性,但其缺点是在凹凸不平的岩地上便不能行走。
此外,因普通车轮无法在阶梯及有段差的地外行走,因此积极研究一种有车轮、三辆以上连结构的特殊形态,及特殊组合的不限轨道式机器人,最近亦努力开发步行机器人,使其能登上阶梯。
本次研究即为移动机器人设计及其在控制器的实现,是说明当移动机器人在轨行动作中若遇到障碍物时会透过微动开关将讯息传回电路板中进行判断,再配合计数器的动作使机器人能避开障碍物并往下个路径前进,知道要到远的目标。
无疑,自动化控制理论本来是要使机器人变聪明。
慧鱼安装使用说明共25页文档

25、学习是劳动,是充满思想的劳动。——乌申斯基
谢谢!
4、基本构件装配方法四
齿轮、蜗杆、轮轴等在 进行安装时注意安装的 先后顺序。
5、基本构件装配方法五
三、模型的配线
• 确定导线的长度
1、参考每个组合包中的操作手册里推荐的导 线长度。
2、根据自己模型的实际位置以及走线的合理 布置选择合适的长度。
• 接线头的连接
1、先确定导线的长度,数量。
2、红外 线发射接收装置、传感器(光 敏、热敏、磁敏、触敏),发 光器件,电磁气阀,接口电路 板,可调直流变压器(9V, 1A,带短路保护功能)。
3。气动元件
气缸、气阀(手动、电磁阀)、 气管、管接头(三通、四通)、 气泵、储气罐等。
利用慧鱼上述工业标准的基本构件(机械元件/电气元件 /气动元件),辅以传感器、控制器、执行器和软件的配合, 运用设计构思和实验分析,可以实现任何技术过程的还原, 更可以实现工业生产和大型机械设备操作的模拟,从而为实 验教学、科研创新和生产流水线可行性论证提供了可能。
图3表示迷你马达的接线安装。慧鱼模 型中含有两种不同的电机:迷你马达 和大功率马达。迷你马达适用于辅助 驱动和小功率要求的场合,而大功率 马达则用于驱动大型器件,如机器人。 迷你马达在正向及两侧向都有接线口, 从任意一侧都可以接通,图中三个图 分别为其俯视,左视及侧视接线图。
图3
2、基本构件装配方法二
3、两头分别剥去塑料护套,露出约4mm左 右的铜线,把铜线向后弯折,插入线头旋紧 螺丝。
4、重复以上步骤,完成接线头
• 规范走线的几种方法
慧鱼模型说明书
2.1 所建模型的主要功能
本次实践中我们组所设计的慧鱼模型三维图如图1,其主要功能是可通过人工控制机械臂的张合,伸长缩短以及方位旋转等,能够灵活实现大型物件的夹持、运输、安型的主要原动件为如图2所示的摇柄,传动机构为如图3所示的一对锥齿轮啮合,执行机构为如图4所示的可转圆台。传动过程为通过摇动手柄,带动手柄末端的锥齿轮旋转,然后通过锥齿轮副带动竖直杆旋转,由于模型中竖直杆与圆台是过盈配合,因此可带动圆台旋转,从而实现机械手臂的旋转操作。
(3)可另设一个控制室,使操作环境更加舒适,使操作人员对机械手的方位观察得更加清晰。
(4)可增设机械手的关节,使其结构更加接近人手,从而提高机械手的灵活度,更加容易夹持物件,并容易控制夹持所需力度。
2.2 结构设计……………………………………………………………………………2
3 性能拓展说明部分…………………………………………………………………… 4
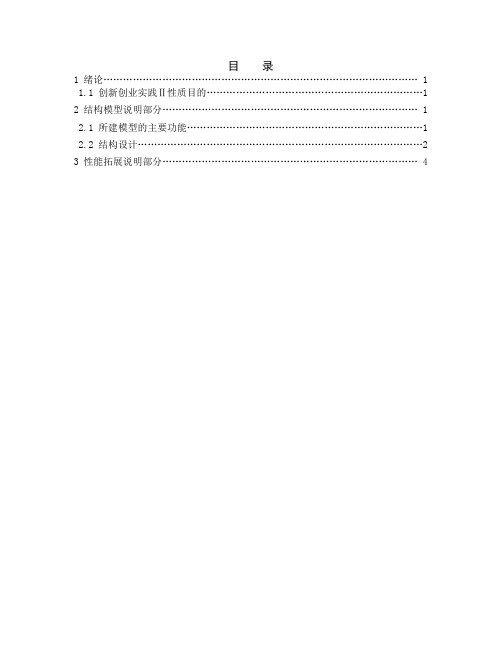
1 绪论
1.1创新创业实践Ⅱ性质目的
《创新创业实践Ⅱ》作为一门实践性必修课程,旨在提高机械设计制造及其自动化专业学生的实践动手能力,同时增进学生对机械以及控制的了解。
图2
图3
图4
另外,如图5所示模型中的机械手臂可以实现上下摆动、伸长缩短、手爪开合的操作。
图5
3 性能拓展说明部分
此模型只是人控机械手臂的雏形,当中还有很多可以改进、拓展的地方,现举例分述如下:
(1)底盘可改成履带式并增设原动机,即可实现模型整体的平面移动,使模型的行进方位更加灵活。
(2)此模型原动件为手柄,但实际应用中可改成步进电动机,通过控制对电动机转速、转数的控制实现机械手旋转快慢、旋转角度的更精确的控制。
1 绪论…………………………………………………………………………………… 1
慧鱼功能模块和编程-文档资料

电机工作时间可 以用延时控制。
电机工作时间 也可以用开关控制。
7
2、开关(接触传感器)
常开:按下按钮=导通;松开=断开 常闭:按下按钮=断开;松开=导通
可以是按 钮作用,也 可以是行程 接触开关。
8
3、灯泡
普通发光灯泡
聚焦灯泡
9V直流,0.1A
头上有透镜以便聚焦
9
4、电阻
5、光电管
电阻为热传感器,可测量温度。
28
2、电动机控制程序
29
1、红绿灯控制程序
设计思路
红绿灯通常情况下为绿灯 亮,有行人按下按钮(E1),2 秒钟后绿灯灭,黄灯亮,4秒钟 后黄灯灭,红灯亮,红灯持续亮 8秒钟,接着红灯、黄灯同时亮 2秒钟,随后红、黄灯灭,绿灯 有亮。
30
31
三、程序设计
32
1、汽车运行控制
按下开关E1发出 汽车模型前进的指令, 在规定脉冲内可以一直 向前走,用记数开关E2 计算脉冲。
在功能块的对话框中以秒作单 位输入想要的延迟时间。
20
16、停止
停止功能块关闭接口的所有 输出 一旦 条件满足。它被置于 工果一个 进程 要结束,你将最后一块功能块的输出 与结束功能块相连。使用结束功能块一个进程可以在不 同的点结束。但也有可能将几个输出与一个结束块相连。
门控制思路: 1、门关闭——开关 2、测试人与车的通过 3、门打开 4、通过时间 5、门关闭
43
44
(构成流程图的单元) 利用功能模块能画出
流程图,并生成控制程 序。
1、开始
创建 新程序的开端。
14
编程过程
15
2、 输入
输入功能块用接口E1-E8。一个数字输入只能 拥有两种状态之一,0 或 1。
慧鱼模型说明书
慧鱼模型说明书1. 引言本文档旨在介绍慧鱼模型的设计原理、功能特点以及使用方法。
慧鱼模型是一种基于人工智能技术的智能鱼类模拟器,能够模拟鱼类的行为和生态系统,为科研人员和教育工作者提供了一个模拟真实水生环境的平台。
本文档将详细介绍慧鱼模型的各个方面,旨在帮助用户了解并正确使用慧鱼模型。
2. 设计原理慧鱼模型的设计基于以下原理:•生物学模型原理:慧鱼模型通过研究真实水生生物的行为和生态系统,构建了一套模拟鱼类行为的数学模型。
这些模型包括鱼类的运动、觅食、繁殖等行为。
•人工智能技术原理:慧鱼模型使用了人工智能技术,包括机器学习和深度学习,来进行鱼类行为的预测和模拟。
通过分析大量真实鱼类行为数据,模型可以学习和推断鱼类的行为规律。
•交互设计原理:慧鱼模型还包含了交互设计的原则,使用户可以通过图形界面与模型进行交互,并观察和控制模拟的水生环境。
3. 功能特点慧鱼模型具有以下功能特点:•真实鱼类模拟:慧鱼模型能够模拟真实鱼类的各种行为,包括游动、觅食、逃避、繁殖等。
模型还考虑了鱼类与环境的相互作用,可以模拟鱼类对水温、光照等环境因素的感知和适应。
•自动学习和预测:慧鱼模型可以根据观察到的真实鱼类行为数据,自动学习和预测鱼类的行为。
模型可以根据当前环境条件和鱼类个体的特征,预测其接下来的行为,并进行模拟。
•灵活的参数设置:慧鱼模型提供了一系列参数供用户进行设置。
用户可以调整参数来模拟不同种类的鱼类,或者模拟不同环境条件下的鱼类行为。
•可视化展示:慧鱼模型通过图形界面向用户展示模拟的水生环境和鱼类行为。
用户可以观察鱼类的运动轨迹、觅食行为等,并对模拟环境进行交互操作。
4. 使用方法使用慧鱼模型的方法如下:1.安装慧鱼模型软件:用户需要下载并安装慧鱼模型软件。
软件提供了版本适用于不同操作系统的安装包,用户可以根据自己的操作系统选择合适的版本。
2.启动软件:安装完成后,用户可以启动慧鱼模型软件。
软件会打开一个图形界面,显示模拟环境和控制面板。
慧鱼零件管理系统说明书

慧鱼零件管理系统说明书作品内容简介在大学慧鱼教室里经常会出现的一个场景就是老师在挠头,想不明白为什么明明整理好的零件却无故少了几个。
出现此种现象的原因在于慧鱼零件种类很多,不易管理,而且很多学生不太注重对零件的爱护,时常掉了也不管。
老师如果每次上完课后都需要对零件进行整理计数,这会消耗大量的时间及人力。
此作品就是针对此种情况而设计的。
在每次课后老师只需要将凌乱的零件倒进管理系统,系统会自动对零件进行分类整理。
并把相应零件的个数记录下来。
这是管理系统的整理部分,接下来是管理部分。
系统在最开始的时候有一个各种零件的初始个数,当上课开始时,根据上个内容输出相应的零件。
在学生创意课时,系统记录学生学号以及学生借走的零件编号以及个数!当学生用完归还时,系统会与之前出借的数据进行对比,作好记录,并发送数据给老师,便于老师了解情况。
【设计背景】慧鱼创意组合模型体现不同学科知识点的各种组合包,不仅可以应用于中小学各个年级学科教学、还可以用于大学不同专业以及研究生工程实验和技术创新活动,现在以清华大学、上海交通大学为代表的一批高校建立的慧鱼创新实验室就是利用慧鱼模型组合包系列建立的工程技术实验室,是创新教育的一个全新平台。
通过慧鱼模型的使用,不仅可以让我们的孩子将多学科多领域的综合知识融会贯通于实践过程中,更重要的是培养了他们的创新意识和创新能力。
创新是一个民族进步的灵魂,而慧鱼创意组合模型就是我们期待的创新教育的理想学具!慧鱼模型就是利用“六面可拼接体”这种开放的零件,来构建或者模拟现实发挥你的创意,来完成机电一体化的工业设计为主的模型组建,现在慧鱼模型在中国有众多的高校以及职业学校在使用,并且越来越受到大家的关注。
相信慧鱼会成为中国创新教育的理想教具~!正是因为慧鱼越来越受欢迎,而且零件种类繁多,所以在每次教学之后零件的管理便成为大问题。
也是因为此种原因,慧鱼实验室的开放程度不是百分之百,也造成学生创新没有积极性,影响到教学授课!因此,此慧鱼管理系统的出现便很好的解决了这一问题,实现了零件的自动化管理,为学生的创新之路扫清了障碍。
慧鱼使用说明
慧鱼教具编程模块简介
9)Terminal——终端模块
①
②
终端模块用于在程序运行时
③
显示及输入特定值。该模块也放
④
置于程序表面,不与其它模块相
⑤ ⑥
连。
⑦
⑧
慧鱼教具编程模块简介
10)Display——显示模块
显示功能模块用来在Terminal 终端 模块的两个显示窗口中显示数据值、变量 或输入端口EX~EY或EA~ED。当插入模 块时,在功能模块的对话框中选择使用窗 口DS1或DS2,及要在其中显示的数据。
马达
灯泡
电磁铁
插入该功能模块时,应从“Type” 对话框中选择显示对应的图标。 在“Action” 中选择希望的输出状态。
慧鱼教具编程模块简介
2)Input——输入模块
按键开关 光电传感器 磁敏感应器
插入该功能模块时,应从“Type” 对话框中选择显示的对应图标。 在“Branch to the right at” 中选择 希望的输出状态。
慧鱼教具编程模块简介
7)Reset——复位模块
复位模块的功能是当满足对话 框的条件时,复位模块将项目的步 骤复位从头开始。该模块放于程序 的表面,不用画线与其它模块相连。 在一个项目中,只可以使用一次复 位模块。
慧鱼教具编程模块简介
8)Emergency Stop——急停模块
急停模块用来关闭接口板 上所有输出端口。该模块放于 程序的表面,也不用画线与其 它模块相连。在一个项目中, 也只可以使用一次急停模块。
慧鱼教具编程模块简介
5)Start——开始模块
每一个流程图都应有一个Start功能模块, 而且不同的流程图同时开始。
其功能模块图标为:
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1.1创新创业实践Ⅱ性质目的…………………………………………………………1
2 结构模型说明部分…………………………………………………………………… 1
2.1 所建模型的主要功能………………………………………………………………1
2 结构模型说明部分
2.1 所建模型的主要功能
本次实践中我们组所设计的慧鱼模型三维图如图1,其主要功能是可通过人工控制机械臂的张合,伸长缩短以及方位旋转等,能够灵活实现大型物件的夹持、运输、安放等操作。
图1
2.2 结构设计
此模型的主要原动件为如图2所示的摇柄,传动机构为如图3所示的一对锥齿轮啮合,执行机构为如图4所示的可转圆台。传动过程为通过摇动手柄,带动手柄末端的锥齿轮旋转,然后通过锥齿轮副带动竖直杆旋转,由于模型中竖直杆与圆台是过盈配合,因此可带动圆台旋转,从而实现机械手臂的旋转操作。
图2
图3
图4
另外,如图5所示模型中的机械手臂可以实现上下摆动、伸长缩短、手爪型只是人控机械手臂的雏形,当中还有很多可以改进、拓展的地方,现举例分述如下:
(1)底盘可改成履带式并增设原动机,即可实现模型整体的平面移动,使模型的行进方位更加灵活。
(2)此模型原动件为手柄,但实际应用中可改成步进电动机,通过控制对电动机转速、转数的控制实现机械手旋转快慢、旋转角度的更精确的控制。
2.2 结构设计……………………………………………………………………………2
3 性能拓展说明部分…………………………………………………………………… 4
1 绪论
1.1创新创业实践Ⅱ性质目的
《创新创业实践Ⅱ》作为一门实践性必修课程,旨在提高机械设计制造及其自动化专业学生的实践动手能力,同时增进学生对机械以及控制的了解。
(3)可另设一个控制室,使操作环境更加舒适,使操作人员对机械手的方位观察得更加清晰。
(4)可增设机械手的关节,使其结构更加接近人手,从而提高机械手的灵活度,更加容易夹持物件,并容易控制夹持所需力度。