轮轨接触力学3-2017
轮轨接触力学PPT精选文档

21
不同滚动半径导致纵向蠕滑
FS
滑动
FJ
实际最终状态
滑动
FJ
理想状态
v
FS
y
初始状态
两轮发生反向蠕动
22
4.2 纵向蠕滑与速度、驱动/制动载荷关系
Δv =v-ωR : the relative speed of body 1 with respect to body 2 at o ξ= Δv/v
轮轨接触力学
温泽峰,赵鑫 西南交通大学 牵引动力国家重点实验室
1
内容
一 轮轨接触动力力学的研究内容与对象 二 轮轨接触几何关系和滚动接触蠕滑率 三 Hertz接触理论(法向解开创工作) 四 Carter二维滚动接触理论(切向解开创工作) 五 Vermeulen-Johnson无自旋三维滚动接触理论 六 Kalker线性蠕滑理论 七 Kalker简化理论 八 沈氏理论 九 Kalker三维弹性体非Hertz滚动接触理论 十 轮轨黏着问题研究简介
轮轨接触是工业中使用的典型滚动接触副之一; 齿轮、轴承、汽车等相关文献亦可用。
3
2、轮轨接触——低阻力
1) Why and how?
◦ 2001年6月澳大利亚重载世 界记录,列车长7353m,总 重99734t,682车辆,8台 机车。
◦ 坚硬的钢—钢接触。
2) 滚动Vs滑动摩擦
◦ 滚动摩擦系数<10-4。 ◦ 滑动摩擦系数0.3-0.6。
28
b) 横向蠕化率
sin r(sin) r
c o s y& v
基于有限元理论的轮轨接触力学特性仿真研究

基于有限元理论的轮轨接触力学特性仿真研究郭伟杰;王旭东;刘邱祖【摘要】轮轨接触的力学特性研究对保障列车的安全运行至关重要.选择动车组车轮LMa踏面与标准CHN60钢轨,借助有限元理论,分别计算两种轮径在不同轴重以及不同横移量下的轮轨接触应力变化情况.计算结果表明:随着轴重的增加,轮轨接触应力会增大;当车轮有横移时,发现靠近轮缘侧的轮轨接触应力大于远离轮缘侧的;同种工况下,增大轮径可以适当改善轮轨受力状态.【期刊名称】《制造业自动化》【年(卷),期】2015(037)021【总页数】4页(P58-61)【关键词】轮轨接触;力学特性;轴重;横移;有限元理论【作者】郭伟杰;王旭东;刘邱祖【作者单位】太原理工大学机械工程学院,太原 030024;太原理工大学机械工程学院,太原 030024;太原理工大学机械工程学院,太原 030024【正文语种】中文【中图分类】U2110 引言近年来,中国铁路运输业朝着高速重载的方向发展,对其传动部件的力学性能提出了更高的要求。
传统的Hertz[1]接触理论在计算轮轨接触压力时便于操作,简单易懂,但是该理论是在接触表面光滑,弹性变形等前提下推导的,而实际的轮轨接触过程中会有塑性变形,接触表面有摩擦,Hertz接触理论与实际工况相差较大Cater[2]。
在Hertz接触理论的基础上,推导出轮轨接触的切向应力,但是轮轨接触问题是一种高度非线性行为,传统理论所得结果总会存在偏差。
如今许多学者借助有限元理论来分析轮轨接触问题,张军[3]用有限元参数二次规划法,对多种工况进行弹塑性分析;陶功权[4]利用数值程序CONTACT和有限元模型进行了对比,说明有限元理论适用性更广泛;孙明昌[5]用有限元分析软件ANSYS对弹性轮对进行了应力、变形和模态计算分析。
本文借助有限元理论,分析两种轮径分别在不同轴重和不同横移量下的轮轨接触应力变化。
1 建立有限元模型高速动车组车轮踏面选取LMa型,车轮宽度是135mm,轮径分别取Φ860mm,Φ920mm;钢轨选用CHN60。
U75V焊接接头三维轮轨滚动接触有限元分析
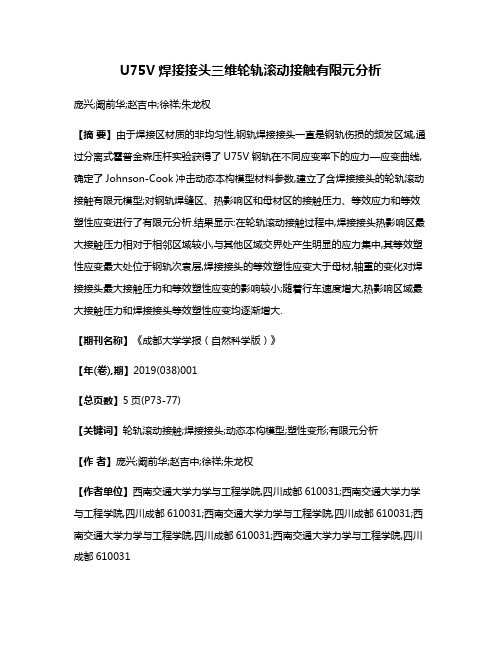
U75V焊接接头三维轮轨滚动接触有限元分析庞兴;阚前华;赵吉中;徐祥;朱龙权【摘要】由于焊接区材质的非均匀性,钢轨焊接接头一直是钢轨伤损的频发区域,通过分离式霍普金森压杆实验获得了U75V钢轨在不同应变率下的应力—应变曲线,确定了Johnson-Cook冲击动态本构模型材料参数,建立了含焊接接头的轮轨滚动接触有限元模型;对钢轨焊缝区、热影响区和母材区的接触压力、等效应力和等效塑性应变进行了有限元分析.结果显示:在轮轨滚动接触过程中,焊接接头热影响区最大接触压力相对于相邻区域较小,与其他区域交界处产生明显的应力集中,其等效塑性应变最大处位于钢轨次袁层,焊接接头的等效塑性应变大于母材,轴重的变化对焊接接头最大接触压力和等效塑性应变的影响较小;随着行车速度增大,热影响区域最大接触压力和焊接接头等效塑性应变均逐渐增大.【期刊名称】《成都大学学报(自然科学版)》【年(卷),期】2019(038)001【总页数】5页(P73-77)【关键词】轮轨滚动接触;焊接接头;动态本构模型;塑性变形;有限元分析【作者】庞兴;阚前华;赵吉中;徐祥;朱龙权【作者单位】西南交通大学力学与工程学院,四川成都610031;西南交通大学力学与工程学院,四川成都610031;西南交通大学力学与工程学院,四川成都610031;西南交通大学力学与工程学院,四川成都610031;西南交通大学力学与工程学院,四川成都610031【正文语种】中文【中图分类】U211.5;O344.30 引言随着我国高速铁路建设的快速发展,钢轨的焊接工艺取得了极大的进步.研究表明,由于钢轨焊接接头处材质的非均匀性,无论是铝热焊接钢轨还是闪光焊接钢轨,在其焊接接缝两端均存在明显的热影响区域,该区域的硬度较低,容易发生损伤与破坏[1].因此,有必要通过实验和数值模拟相结合的方法来研究轮轨滚动接触过程中钢轨焊接接头区域的力学性能表现.目前,有限元方法作为轮轨滚动接触研究的重要工具,科研人员利用其对轮轨滚动接触疲劳、轮轨间蠕滑力、钢轨轨缝接触—冲击行为以及轮轨滚动接触蠕滑特性等问题进行了研究,取得了系列成果[2-5].同时,已有一些研究开始关注钢轨焊接接头的有限元分析,例如,焊接接头冷却过程的应力分布规律及原因,钢轨焊缝内弹塑性应力分布状态,以及铝热焊焊接接头疲劳裂纹萌生的位置和损伤程度的影响因素等[6-8].由于上述研究未考虑轮轨材料在动态荷载过程中的率相关性,无法合理预测动态滚动接触过程中钢轨的应力—应变响应,故本研究拟采用Johnson-Cook冲击动态本构模型,探讨动态冲击荷载下应变率对钢轨动态流动应力的影响以及钢轨焊接接头轮轨三维滚动接触动力学有限元分析,以揭示钢轨焊接接头材质非均匀性对钢轨在滚动接触下的应力和应变影响.1 有限元模型本研究采用有限元软件ABAQUS建立轮轨三维滚动接触分析模型,对滚动过程中钢轨焊接接头区域力学特性进行分析.1.1 几何模型及网格划分研究模型由车轮和钢轨两部分组成,其中车轮直径为915 mm,钢轨长500 mm,根据U75V闪光焊接接头试样单轴拉伸实验过程中不同位置的应变分布(见图1),将焊接接头拉伸过程中应变较大的区域作为热影响区(HAZ1和HAZ2),两热影响区之间区域为焊缝区(WZ),热影响区和焊缝区宽度分别为20 mm和40 mm.图1 应变分布及区域划分示意图在所建立的模型中,车轮采用LMA型廓形,钢轨采用60 kg/m钢轨外形,单元类型为C3D8三维实体单元.本研究对轮轨接触区域进行了网格精细剖分,具体如图2所示.图2 轮轨三维有限元模型示意图1.2 材料模型和参数通常,在列车行进中,由于钢轨表面的不平顺和车轮多边形化,使列车车轮与钢轨时刻处于冲击荷载作用之下.因此,在轮轨动态滚动接触有限元分析中,必须考虑动态载荷作用下应变率对材料力学性能的影响,并选取合理的材料动态本构模型.对此,本研究拟利用有限元软件ABAQUS材料库中包含的Johnson-Cook动态本构模型[9].Johnson-Cook动态本构模型主要用于描述金属材料在冲击荷载下的力学响应,其考虑了大变形和高温条件的影响,描述了材料应变、应变率以及温度与动态流应力之间存在的乘法效应,表达形式为,σ=(A+Bεn)(1+Clnε*)[1-(T*)m](1)(2)T*=(T-Tr)/(Tm-Tr)(3)式中,σ为材料动态流应力;ε为材料的塑性应变;和分别为参考应变率和动态荷载塑性应变率;T为材料变形时的温度;Tr为霍普金森压杆实验参考温度;Tm为材料的熔点;A、B、C、n、m为模型中的参数,分别为材料的屈服强度、应变相关系数、应变率相关系数、应变相关的指数系数和温度相关系数.本研究通过霍普金森压杆对U75V轨钢开展动态压缩实验,获取了不同应变率下的应力—应变曲线,具体如图3所示.同时,通过最小二乘法确定了Johnson-Cook本构模型的相关参数(见表1).对比图3中的实验和模拟结果可知,Johnson-Cook本构模型可较好地模拟U75V钢轨的动态冲击应力—应变曲线.为研究钢轨焊接接头附近材质非均匀性对钢轨滚动接触下应力与应变的影响,焊缝区和热影响区的材料参数除屈服强度外均与母材区保持一致.而由图1可知,热影响区材料强度较低,故将热影响区的屈服强度假定为母材区0.7倍,焊缝区屈服强度假定为母材区0.9倍,即二者的屈服强度分别为母材的70%和90%.车轮材料考虑为弹性,其弹性模量为208.5 GPa[10],轮轨间摩擦系数为0.3.图3 不同应变率下U75V钢轨的应力—应变曲线及验证表1 U75V钢轨材料参数材料参数数值弹性模量E/GPa205泊松比μ0.3参考应变率ε·0/s-1454A/MPa620B/MPa738C0.15n0.22密度ρ/(kg/m3)7 7901.3 边界条件与荷载有限元模型中,钢轨底部采取全固定约束;将车轮轴部节点耦合至车轮中心,并施加不同轴重和纯滚动速度荷载.2 结果与讨论2.1 接触压力变化由于钢轨焊接接头材质的非均匀性,在车轮滚过钢轨焊接接头的过程中,轮轨之间的接触压力不断变化.钢轨焊接接头不同位置的最大接触压力如图4所示,结果显示,热影响区的最大接触压力明显小于其相邻区域.由图1可知,在单轴拉伸过程中,钢轨焊接接头热影响区应变相对于母材区与焊缝区较大,表明热影响区的强度较该两个区域低,从而造成了热影响区接触斑面积较大.不同轴重下钢轨焊接接头不同位置的钢轨最大接触压力如图5所示,结果显示,轴重的小幅变化对钢轨焊接接头接触压力影响不大.行车速度不同时,HAZ1的最大接触压力变化不明显(见图6),但HAZ2的最大接触压力会随行车速度增大逐渐增大(见图7).图4 不同位置最大接触压力分布曲线图5 不同轴重下焊接接头不同位置最大接触压力图6 不同行车速度下HAZ1最大接触压力图7 不同行车速度下HAZ2最大接触压力2.2 等效应力分布当车轮轴重为17 t、速度为300 km/h时,车轮滚过钢轨焊接接头后,两个热影响区等效应力分布如图8所示.为更好地显示钢轨顶面和内部的等效应力分布,本研究沿轮轨接触中心对钢轨进行了剖分显示.通过与无焊接钢轨等效应力对比发现,车轮经过热影响区时,热影响区与其他区交界处均会发生应力集中现象.车轮滚过钢轨焊接接头后,残余等效应力较大位置位于热影响区与其他区交界处(见图9).图8 钢轨的等效应力分布图9 残余等效应力分布图不同轴重和行车速度下,钢轨焊接接头残余等效应力较大位置均位于热影响区与其他区交界处,最大残余等效应力如表2、表3所示.表中数据显示,不同轴重下钢轨焊接接头最大等效残余应力水平相似,表明轴重对等效残余应力影响不大.而在不同行车速度下,钢轨焊接接头等效残余应力存在较大差异,当速度为300 km/h 时其值最大,当速度为250 km/h时其值最小.表2 不同轴重下焊接接头最大残余等效应力轴重/t161718最大残余等效应力/MPa489.8491.1485.8表3 不同行车速度下焊接接头最大残余等效应力行车速度/(km/h)250300350最大残余等效应力/MPa464.9491.1480.82.3 等效塑性应变分布当车轮轴重为17 t,以速度为300 km/h滚过钢轨焊接接头后,其等效塑性应变分布与钢轨无焊接接头对比如图10所示.数据显示,车轮滚过后,钢轨焊接接头与无焊接钢轨的等效塑性应变较大的位置都位于钢轨次表层,且位于轮轨接触位置下方,钢轨焊接接头的等效塑性应变较大,最大处位于热影响区域.图10 有焊接接头与无焊接钢轨等效塑性应变对比有焊接接头钢轨与无焊接钢轨不同深度的等效塑性应变进行对比如图11和图12所示.结果表明,两者等效塑性应变最大处位于距钢轨表面约2.4 mm处.焊接钢轨母材区等效塑性应变水平与无焊接钢轨相似,但焊接接头区域等效塑性应变明显高于无焊接钢轨,尤其是在热影响区域(见图13).数据显示,钢轨焊接接头两侧热影响区等效塑性应变分布存在差异,HAZ2等效塑性应变较大(见图14),这是因为车轮在滚动过程中对钢轨产生的挤压作用引起的.图11 钢轨焊接接头不同深度等效塑性应变图12 无焊接钢轨不同深度等效塑性应变图13 焊接接头与无焊接钢轨内部等效塑性应变对比图14 焊接接头两侧塑性变形差异考虑轴重影响,当轴重分别取16 t、17 t和18 t时,钢轨焊接接头等效塑性应变分布规律变化不大,其内部等效塑性应变随轴重增大稍有增大,具体如图15所示.表4为不同轴重下钢轨焊接接头最大等效塑性应变,可见轴重对等效塑性应变的影响较小.图15 不同轴重下焊接接头内部等效塑性应变表4 不同轴重下焊接接头最大等效塑性应变轴重/t161718最大等效塑性应变/%1.671.701.73考虑行车速度影响,当行车速度分别为250 km/h、300 km/h和350 km/h时,钢轨焊接接头等效塑性应变分布规律不变,但数值有较大差异,具体如图16所示.表5给出了不同行车速度下钢轨焊接接头最大等效塑性应变. 数据显示,随着行车速度增大,最大等效塑性明显增大.结合图16可知,其等效塑性明显增大区域位于HAZ2区.图16 不同行车速度下焊接接头内部等效塑性应变表5 不同行车速度下焊接接头最大等效塑性应变行车速度/(km/h)250300350最大等效塑性应变/%1.401.701.873 结论本研究认为,在轮轨滚动接触过程中,钢轨焊接接头热影响区域最大接触压力较相邻区域小,轴重对热影响区域最大接触压力影响较小,随着行车速度增大,钢轨焊接接头热影响区域HAZ2最大接触压力逐渐增大.在车轮经过钢轨焊接接头热影响区域时,热影响区域与其他区域交界处均会发生应力集中.等效塑性应变最大处位于钢轨次表层,有焊接接头钢轨等效塑性应变大于无焊接钢轨.由于挤压作用,钢轨焊接接头热影响区域HAZ2等效塑性应变大于热影响区域HAZ1.轴重对钢轨焊接接头等效塑性应变影响较小,但等效塑性应变随着行车速度增大逐渐增大.参考文献:【相关文献】[1]李金华.重载线钢轨焊接接头磨损研究[D].北京:中国铁道科学研究院,2012.[2]金学松,沈志云.轮轨滚动接触疲劳问题研究的最新进展[J].铁道学报,2001,23(2):92-108.[3]温泽峰,金学松,张卫华.钢轨轨缝接触冲击的有限元分析[J].摩擦学学报,2003,23(3):240-244.[4]肖乾,周新建,王成国,等.考虑摩擦因数与滑动速度相关时的轮轨滚动接触有限元分析[J].润滑与密封,2012,37(1):1-5.[5]曹世豪,江晓禹,文良华.轴重和摩擦力对轮轨接触疲劳的影响[J].表面技术,2013,42(6):10-14.[6]张天笑.U75V钢轨闪光焊接工艺的数值模拟研究[D].北京:北京交通大学,2017.[7]石建奎.钢轨焊接接头应力的有限元分析[D].杭州:浙江工业大学,2010.[8]叶渊,潘文彬,杨韬,等.钢轨铝热焊接接头力学性能的有限元分析[J].机电工程,2013,30(1):26-30.[9]Johnson G R,Cook W H.Fracture characteristics of three metals subjected to various strains,strains rates,temperature and pressure[J].Eng Fract Mech,1985,21(1):31-48. [10]方涛.轮轨钢材料刺轮——疲劳交互作用实验和理论模型研究[D].成都:西南交通大学,2017.。
轮轨关系 ppt课件

ppt课件
22
轮轨接触几何关系
数值迭代法可适于能以离散数据表达的任意轮轨外形的几何学计算, 应用较广,其精度主要取决于迭代步长等控制参数:
• 将轮对向上移动一定距离,与轨道分离
1
• 给轮对一定的横移量,即将左右车轮踏面移动一距离
2
• 计算左右轮轨的最小垂向间隙点
3
• 比较左右最小间隙,若差异值的绝对值小于设定的精度,就判定左右轮在
4
最小间隙处与轨道接触,求得左右接触点,否则按差值调整轮对的侧滚角
• 按差值计算的侧滚角进行调整使左右最小间隙接近相等,并输出接触位置
5
的有关信息
• 重复第(3)(4)步
6
可确定任意踏面与轨头外形在轮对横移后的轮轨几何接触点位置,
以
ppt课件
23
及该位置的实际滚动圆半径、接触角、接触点曲率半径等几何参数
正常钢轨与磨耗钢轨
ppt课件
槽型钢轨 13
刚性轮对导向原理
为保证轮对在钢轨上的正常滚动,车轮轮缘与钢轨工作边之间需留有 一定的间隙,称为游间
通过曲线时,轮对将偏离线路中心向外移动,外侧车轮的滚动圆半径 大于内侧车轮滚动圆半径,从而自动实现轮对通过曲线的自动导向
直线运动时,若轮对偏离线路中心线,偏离中心一侧的车轮滚动圆半 径将大于名义滚动圆半径,另一侧反之,在相同的角速度情况下,偏 离一侧的车轮将滚过更长的距离,从而使偏离中心的车轮返回中心
何参数只在二阶以上产Th影响,一般可忽略
轮对相对轨道横移量yw将决定轮对侧滚角
轮轨接触几何pp参t课数件
20
影响轮轨接触几何关系的参数
ppt课件
21
轮轨接触几何关系
轮轨接触几何关系及滚动理论

第三节轮轨接触几何关系及滚动理论轨道车辆沿钢轨运行,其运行性能与轮轨接触几何关系和轮轨之间的相互作用有着密切的关系。
同时,由于轮轨的原始外形不同和运用中形状的变化,轮轨之间的接触几何关系和接触状态也是不同和变化的。
米用车轮轴承、滚动是车辆获取导向、驱动或制动力的主要方式,轨道车辆中地铁、轻轨常采用钢轮钢轨方式,而独轨、新交通系统及部分地铁则采用充气轮胎走行在硬质导向路面上。
车轮与导轨间的滚动接触关系决定了它们间的作用力、变形和相对运动。
因此滚动接触直接影响城市轨道车辆的性能、安全、磨耗与使用寿命。
一轮轨接触参数和接触状态当车辆沿轨道运行时,为了避免车轮轮缘与钢轨侧面经常接触和便于车辆通过曲线,左右车轮的轮缘外侧距离小于轨距,因此轮对可以相对轨道作横向位移和摇头角位移。
在不同的横向位移和摇头角位移的条件下,左右轮轨之间的接触点有不同位置。
于是轮轨之间的接触参数也出现变化。
对车辆运行中动力学性能影响较大的轮轨接触几何参数如下(图5一8): 1左轮和右轮实际滚动半径r L ,r R。
当轮对为刚性轮对,轮对绕其中心线转动时,各部分的转速是一致的,车轮滚动半径大,在同样的转角下行走距离长。
同一轮对左右车轮滚动半径越大,左右车轮滚动时走行距离差就加大,车轮滚动半径的大小也影响轮轨接触力。
2左轮和右轮在轮轨接触点处的踏面曲率半径和3左轨相石轨在稚轨接触点处的矶头截曲曲率半径和轮轨接触点处的曲率半径大小将会影响轮轨实际接触斑的大小、形状和轮轨的接触应力。
4左轮和右轮在接触点处的接触角s:和6R,即轮轨接触点处的轮轨公切面与轮对中心。
线之间的夹角。
轮轨接触角的大小影响轮轨之间的法向力和切向力在垂向和水平方向分量的大小。
5轮对侧滚角小w。
轮对侧滚角会引起转向架的侧滚和车体侧滚。
6.轮对中心上下位移Z w。
该量的变化会引起转向架和车体的垂向位移。
研究轮轨接触关系时应特别注意轮轨间的接触状态。
车轮与钢轨之间的接触状态可能有两种,即一点接触和两点接触(图5一9),轮对相对轨道的移动量不大时,一般出现车轮踏面与钢轨顶面相接触,通常为“一点接触”;当轮对相对轨道的横移和摇头角位移量超过一定范围,根据不同轮轨形状特点可能引起车轮踏面和轮缘同时与钢轨顶面和侧面接触,即所谓“两点接触”。
高速列车轮轨接触力研究

高速列车轮轨接触力研究在现代交通运输领域,高速列车技术一直是备受关注的研究领域。
而在高速列车技术中,轮轨接触力的研究是一个至关重要的方面。
轮轨接触力的研究涉及列车运行的稳定性、行驶速度的提升以及轨道设备的使用寿命等诸多方面。
本文将以高速列车轮轨接触力的研究为主题,探讨该领域的一些关键问题和研究成果。
在高速列车行驶过程中,轮轨接触力是指列车轮轨之间发生的力的交互作用。
它既受到列车自身重力的影响,也受到列车加速度、速度等因素的影响。
研究轮轨接触力首先需要了解这种力的产生机制。
传统的轮轨接触力研究主要基于力矩平衡原理,即轮胎力矩平衡方程。
该方程考虑了轮轨垂向力、侧向力和纵向力之间的平衡关系,通过求解该方程可以获得轮轨接触力的大小和方向。
然而,由于高速列车运行过程中各种因素的复杂性,传统的轮轨接触力研究方法已经不能满足实际需求,因此需要进一步深入研究。
近年来,随着各类高速列车的研发和投入使用,轮轨接触力的研究逐渐得到了加强。
研究者们通过建立更精确的数学模型,结合实际的运行数据,对列车轮轨接触力进行了深入的分析。
据研究者的观察和实验结果表明,轮轨接触力的大小和方向与列车运行速度、轮胎和轨道的材料特性有关。
其中,轮胎的摩擦系数和轮胎与轨道之间的摩擦特性是影响轮轨接触力的重要因素。
目前,研究者们主要通过仿真计算和实验方法来研究高速列车轮轨接触力。
其中,仿真计算方法主要基于有限元分析和多体动力学模拟等技术,可以模拟列车在不同运行状态下的轮轨接触力变化规律。
而实验方法则通过实际的列车试验和采集数据,对轮轨接触力进行测量和分析。
这两种方法各具优势,在综合应用中可以更准确地研究轮轨接触力的特性和变化规律。
除了轮轨接触力的研究方法,高速列车轮轨接触力的研究还需要关注其对列车行驶安全和轨道设备寿命的影响。
轮轨接触力过大或不稳定会导致列车不稳定、脱轨等安全问题,而过大的接触力也会加速轨道的磨损和疲劳,缩短轨道使用寿命。
因此,研究者们还需要探索轮轨接触力与列车运行速度、加速度等因素之间的关系,以及在不同轨道条件下接触力的变化规律。
高速铁路钢轨的轮轨间力学相互作用研究

高速铁路钢轨的轮轨间力学相互作用研究随着高速铁路的飞速发展,对于轨道和钢轨的性能和安全性提出了越来越高的要求。
而轮轨间的力学相互作用是决定铁路运行稳定性和安全性的重要因素之一。
因此,对高速铁路钢轨的轮轨间力学相互作用进行深入研究具有重要的理论意义和实际应用价值。
高速铁路钢轨的轮轨间力学相互作用主要包括轮轨接触力、轨道弯曲和轮轨磨损等方面的研究。
首先,轮轨接触力是指车轮与钢轨接触而产生的力。
将车轮当作一个圆形,钢轨当作一个无限长的直线,车轮和钢轨接触处的力学模型可以简化为Hertz接触理论。
根据该理论,可以计算出车轮和钢轨的接触应力分布和接触面形状。
在实际应用中,还需要考虑车体上的垂荷、横荷和弯矩等因素,以获得更为真实的轮轨接触力。
其次,轨道弯曲是指钢轨在列车通过时发生的弯曲现象。
高速列车的高速运行会带来巨大的动载荷,导致钢轨产生弯曲变形。
钢轨的弯曲变形会对列车的稳定性和车体悬挂系统产生影响。
因此,对钢轨弯曲的研究非常重要。
通过建立钢轨的弯曲模型,可以分析列车在不同速度下的振动特性,以指导钢轨设计和铺轨施工。
此外,轮轨磨损也是轮轨间力学相互作用中的一个重要研究方向。
随着高速列车的频繁运行,轮轨间的摩擦和磨损会导致钢轨的表面磨耗和疲劳,进而影响轨道的几何形状和列车的运行平稳性。
因此,研究轮轨磨损规律和机理,开展相关的耐磨材料和防止磨损措施的研究,对于提高轨道使用寿命和降低维护成本具有重要意义。
同时,轮轨间力学相互作用的研究也需要考虑列车的运行速度、列车轴重等因素对轨道和钢轨的影响。
高速铁路的列车运行速度和轴重较大,使得力学相互作用更加复杂。
从列车动力学角度出发,对轮轨间的动态响应进行研究,可以解读轮轨之间的复杂力学过程。
综上所述,高速铁路钢轨的轮轨间力学相互作用研究是一项相当复杂、关键的研究课题。
它不仅涉及到力学学科的多个领域,也涉及到材料科学、结构工程和交通运输等方面的知识。
只有深入研究高速铁路钢轨的轮轨间力学相互作用,才能更好地保障高速铁路的安全性、稳定性和使用寿命,为人民群众提供更加便捷和快速的出行方式。
轮轨接触力学3-2017

xi
判断接触点
三向蠕滑率
接触力学、 理论
三向接触力
接触斑及应 力分布
蠕滑力、率 之间关系
振动、噪声
磨耗、疲劳
塑性流动
引言2:法、切向接触(Normal and tangential contact)
1). 法向接触问题:接触斑形状、大小及法向应力分布 2). 切向接触问题:在法向解基础上,求解摩擦力的分布(大小、方向)
v0 t v t lL , S R BB LR 0 lR Rt Rt
S L AA LL
内外轨弧长(轮径)差导致的纵向蠕滑率 c S L, R lL , R xL , R
v0 t Rt
1
曲线通过 相关的纵 向蠕滑率 分量
轮对相对曲线曲率中心转动产生的 纵向蠕滑率 2
比较式两边同 次幂的系数
e 2 1 (b / a) 2
K ( e) E ( e) D ( e)
/2
0
(1 e 2 sin 2 1 ) 1/ 2 d1 (1 e 2 sin 2 1 )1/ 2 d1
G bp0 K (e)
A G * p0 b a
r r ri v (1 i ) cos ( 0 ) cos cos 半径变化贡献。速度取:与名义半径相比 r0 r0 v0 的速度差在滚动方向分量
sin
& y v
& r0 1 i i (1) l0 cos ri sin ( ) r0 v
摇头贡献。轮对摇头(转动)的自旋分量
xL , R yL , R
rL , R 1 r0
nL , R
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
p p
Ax12
2 Bx 2
1 1 1 2 [ ] 2G1 2G 2
C
2 2 1/ 2 x1 x2 dx 2 p 0 [1 ( ) ( ) ] dx1 a b ) 2 ( x2 x2 ) 2 ]1 / 2 [( x1 x1
x C x C
u 23
刀切无限半 空间弹性体
1 2 2G2
, x2 )dx1 dx 2 p( x1 C [( x x ) 2 ( x x ) 2 ]1 / 2 1 1 2 2 , x2 )dx1 dx 2 p ( x1
C
) 2 ( x2 x2 ) 2 ]1 / 2 [( x1 x1
锥度 横向间隙 轮缘 经验推进
2 轮轨蠕滑率与接触几何的关系
1)直线轨道情形,拖车
& & 1 ri r0 y i i (1) l0 cos ri sin ( ) a) 纵向蠕化率 xi (1 ) cos sin r0 v r0 v
6
2)曲线轨道情形,拖车
对比直线工况,曲线通过时, 横向蠕滑率表达式相同
c xL , R c yL , R c nL , R
xL , R
yL , R c nL , R nL , R
c xL , R
曲线通过 相关的纵 向蠕滑率 分量
2
/2
0
D(e)
G * p0 b a e
2 2
1 [ K (e) E (e)] e2
[ K (e) E (e)]
G * p0 G * p0 2 B [ K (e) D(e)] [ E ( e ) ( 1 e ) K (e)] 2 b be
在已知接触载荷P、物体接触点处曲面的曲率半径 Rij、主曲率平面的夹角和材料物理参数G下:
r r ri v (1 i ) cos ( 0 ) cos cos 半径变化贡献。速度取:与名义半径相比 r0 r0 v0 的速度差在滚动方向分量
sin
& y v
& r0 1 i i (1) l0 cos ri sin ( ) r0 v
温泽峰,赵鑫 牵引动力国家重点实验室
西南交通大学
一 二 三 四 五 六 七 八 九 十 十一 十二 十三 十四 十五
轮轨接触动力力学的研究内容与对象 轮轨接触几何关系和滚动接触蠕滑率 Hertz接触理论(法向解开创工作) Carter二维滚动接触理论(切向解开创工作) Vermeulen-Johnson无自旋三维滚动接触理论 Kalker线性蠕滑理论 Kalker简化理论 沈氏理论 Kalker三维弹性体非Hertz滚动接触理论 轮轨黏着问题研究简介 三维弹塑性滚动接触有限元建模简介 轮轨接触载荷与伤损研究简介 快速接触算法开发 接触问题杂谈 轮轨试验台简介
v0 t v t lL , S R BB LR 0 lR Rt Rt
S L AA LL
内外轨弧长(轮径)差导致的纵向蠕滑率 c S L, R lL , R xL , R
v0 t Rt
1
曲线通过 相关的纵 向蠕滑率 分量
轮对相对曲线曲率中心转动产生的 纵向蠕滑率 2
1 1 1 2 p0 b a 2 2 Ax Bx [ ] {abK(e) D(e) x1 [ K (e) D(e)]x2 } 2G1 2G2 a a b
2 1 2 2
2 2 1 1 1 2 1 1 1 2 G 2G1 2G2 E1 E2
xi
判断接触点
三向蠕滑率
接触力学、 理论
三向接触力
接触斑及应 力分布
蠕滑力、率 之间关系
振动、噪声
磨耗、疲劳
塑性流动
引言2:法、切向接触(Normal and tangential contact)
1). 法向接触问题:接触斑形状、大小及法向应力分布 2). 切向接触问题:在法向解基础上,求解摩擦力的分布(大小、方向)
假设,Δt内轮对有AB位移移动到A’B’,三角形Ot AA’, Ot BB’ 和Ot GWGW’相似
AA Gw GW G G v0 t ( Rt l L ), BB w W ( Rt l R ), Gw GW Rt Rt
左右轮理论上滚过距离应为 左右轮轨的滑动量为
LL LR v0 t
两个局部坐标系,主轴夹角α 整体坐标系
显然,等高线是椭圆
2)平面接触斑,椭球形压力分布
p p0[1 ( x1 / a)2 ( x2 / b)2 ]1 2
1/ 2
x1 2 x2 2 接触总力: P p( x1 , x2 )dx1dx2 p0 1 ( ) ( ) dx1dx2 a b C C
v
i cos ( 1) i
& i cos i v
& r0 cos i v
i
l0 (1) i v sin i
&
侧滚贡献。速度取:侧滚角速度纵向分量导致的横向速度 径向速度贡献。速度取:轮对径向速度沿横向分量
( 1)i
& r i sin i v
3)Linear elastic, half-space contact bodies
3P p0 2ab
这里 g 就是前面的 h, 接触间隙
1 2 u13 u 23 g 0 1 2 u13 u 23 g 0
u13 1 1 2G1
sin
cos
r ( sin ) r & y
自旋贡献。速度取:轮对自旋在横向分量×滚动半径
横移贡献。速度取:横移速度在横向上分量 接触公切面与与水平方向的夹角,(接触角定义为 公切面与轴线的夹角,故应加、减侧滚角)
接触点位置变化贡献。速度取:接触点位置变化速度的横 向分量 侧滚贡献。速度取:侧滚角速度横向分量导致的横向速度
以文章1882年才发表。
我们今天认为的接触力学鼻祖
4)现在,很多人在使用时,却忘了Hertz理论的应用前提。
常有迷信,有时失了怀疑精神!
研究透镜(玻璃)接触的干涉条纹时,基于试验 提出椭圆接触斑假设,以此为始,创立了其理论。
1)contact surfaces
◦ Concentrated contact in oxyz ◦ Smooth (无微观粗糙度,宏 观二阶导数连续) ◦ Second-order polynomial ◦ Constant radius
5
c) 自旋蠕化率
sin i sin i z sin i r0 r0 & r0 1 i cos[ i (1) ] r0 v
& sin i 1 r0 i ni (1) cos[ i (1) ] r0 r0 v
i
自旋贡献。轮对转动的自旋分量
Contact at an area due to elasticity
引言3:赫兹接触理论的争议
1). “天才”赫兹,21岁在柏林跟Helmholtz和Kirchhoff学习自然科学, 研究透镜接触的干涉条纹时碰到了接触问题。 2). 基尔霍夫(电路)定律(Kirchhoff laws); 三维弹性体力学 Kirchhoff 假定;Kirchhoff应力张量 3). 1881年赫兹展示了他的赫兹理论,但Kirchhoff 有几个反对理由,所
比较式两边同 次幂的系数
e 2 1 (b / a) 2
K ( e) E ( e) D ( e)
/2
0
(1 e 2 sin 2 1 ) 1/ 2 d1 (1 e 2 sin 2 1 )1/ 2 d1
G bp0 K (e)
A G * p0 b a
横移贡献。速度取:横移速度在滚动方 向分量
轮轨摇头贡献的纵向蠕化率。速度取 =
接触点到轨道中心的水平距离×摇头角速度
注意:采用局部坐标系,y沿车轮轴线方向,x 与其垂直, 故计算中,需转化到依轨道建Hale Waihona Puke 的整体坐标系。b) 横向蠕化率
& & r & y i i 0 yi ( sin cos ) cos (1) i ( ) cos i v v v & & i i r i l ( 1) ( 1) 0 sin i i v v
c xL ,R
cL, R sin L, R cos L, R vcL, R rL, R cL, R rL, R
v0 sin L, R cos L, R Rt
v0 sin L, R cos L, R Rt
rL, R Rt
sin L, R cos L, R cos
sin L , R cos L , R cos
曲线通过相关的自旋蠕滑率分量
轮对曲线运动角速度导致轮轨之间的 自旋蠕滑率:
c nL , R
v0 cos L, R cos L, R Rt cos L , R c nL , R
Rt
c xL , R c yL , R c nL , R
ˆ
c L, R
vcL, R cos v0
rL, R Rt
sin L, R cos L,R cos