一种多功能搜救机器人的设计
特种机器人分类

特种机器人分类一、介绍特种机器人是指用于执行特殊任务的机器人系统。
随着科技的发展,特种机器人在军事、安全、救援、医疗等领域发挥着越来越重要的作用。
本文将对特种机器人进行分类,以便更好地了解不同类型的特种机器人及其应用领域。
二、地面特种机器人地面特种机器人是指用于在地面上执行任务的机器人系统。
根据功能和应用领域的不同,地面特种机器人可以分为以下几类:1. 探索与侦察机器人探索与侦察机器人主要用于在未知或危险环境中进行侦察和探测任务。
这类机器人通常配备有高清摄像头、红外相机、激光雷达等传感器,可以用于勘测地质环境、搜索灾害现场、监测危险区域等。
常见的探索与侦察机器人包括:•无人机:用于进行航拍、巡逻和侦察任务。
•陆地巡逻机器人:具备自主导航能力,可在复杂地形中执行巡逻任务。
•隧道侦察机器人:用于侦查和勘测隧道内部环境。
•搜索救援机器人:可在灾害现场搜寻幸存者或遇险人员。
2. 清障与拆弹机器人清障与拆弹机器人主要用于处理危险物品、炸弹和爆炸品等。
这类机器人通常配备有机械手臂、爪子、夹钳等装置,可以进行精确的操作和物体处理。
常见的清障与拆弹机器人包括:•安全拆弹机器人:用于处理危险爆炸物品,具备远程操作和精确操作能力。
•化学品处理机器人:用于处理化学品泄漏、清理污染物。
•无人地雷探测机器人:可在危险区域探测和清理地雷。
救援与医疗机器人主要用于灾害救援和医疗救治等任务。
这类机器人通常具备远程操作和医疗救护能力,可以在灾难现场提供迅速的救援和医疗服务。
常见的救援与医疗机器人包括:•救援机器人:用于在灾难现场搜救被困人员、搬运重物等。
•手术机器人:用于进行精确的手术操作,提高手术成功率。
•康复机器人:用于康复训练和物理治疗,帮助患者恢复功能。
三、水下特种机器人水下特种机器人是指用于在水下环境中执行任务的机器人系统。
根据功能和应用领域的不同,水下特种机器人可以分为以下几类:1. 海底探索机器人海底探索机器人用于深海勘探、海底地质调查和资源开发等任务。
机器人设计方案博创

机器人设计方案博创机器人设计方案——博创一、设计目标博创机器人设计的目标是开发一款可编程、功能多样的机器人,能够在家庭和办公场景下提供多种服务,如智能家居控制、语音助手、娱乐伴侣等,满足用户的多样化需求。
二、设计特点1. 多功能性:博创机器人集成了多种功能,包括但不限于智能家居控制、语音助手、娱乐伴侣等,能够满足用户不同领域的需求。
2. 可编程性:博创机器人允许用户进行编程,用户可以通过编程给机器人添加新功能,定制机器人的行为和表现,并与其他智能设备进行连接和控制。
3. 人机交互友好:博创机器人采用自然语言识别和语音交互技术,可以与用户进行智能对话,并根据用户的需求提供相应的服务,让用户感受到与机器人的交流和沟通。
4. 智能感知能力:博创机器人配备了各种传感器,能够感知周围环境,如声音、光线等,从而能够根据环境变化进行智能反应和行动,提高机器人的适应性和智能性。
三、主要功能及应用场景1. 智能家居控制:博创机器人可以与家中的各类智能设备连接,如智能灯、智能窗帘、智能门锁等,通过语音识别和控制技术,实现对智能家居的远程控制,提高生活的便利性和舒适度。
2. 语音助手:博创机器人搭载了语音助手系统,用户可以通过与机器人进行语音对话,获取各类信息和服务,如天气查询、新闻播报、日程安排等,并可以实现语音控制其他智能设备。
3. 娱乐伴侣:博创机器人内置了多种娱乐功能,如音乐播放、故事讲解、智能游戏等,可以与用户进行互动娱乐,提供精神放松和娱乐体验。
4. 个性化定制:博创机器人支持用户进行编程,用户可以根据自己的需求和喜好,为机器人添加新功能,定制机器人的行为和表现,实现个性化定制。
四、技术实现1. 语音识别与合成技术:博创机器人采用先进的语音识别和合成技术,能够准确识别用户的语音指令,并能够以自然流畅的方式进行语音交互。
2. 视觉感知技术:博创机器人配备了摄像头和图像识别技术,能够对环境进行感知和识别,实现图像、人脸等的识别功能,并能够根据识别结果进行相应的行动和反应。
全国大学生机械创新设计大赛决赛作品选集
录
参赛者 庞曾、王皓、李翔、 赵飞龙、 滕 吉柘 徐少兵、苟亚凤、秦衡、王亚 陈江艳、程晓、和毅、吴洋子、谈 云勇 李光发、张 廖萍 川、张平才、刘双龙、 指导教师 何世平、高霄汉 李海涛、魏文军 高全杰 王兴东 周建钊、程建辉 吴新跃、郭文勇 程志红 文晓希、卢耀晖 罗庆生、韩宝玲 林梅、仝崇楼 朱育权、万宏强 白国振、钱炜 孙学雁、刘杰 吴昌林、周世权
师忠秀、刘丹
王晨、应申舜 司慧、钱桦 王淑坤、李晓舟 姜锐、孙莉 包钢、焦映厚
多功能救援担架
自动触发式地震救生床 安全拱形自动呼救式防震床
武汉理工大学
浙江工业大学 山东大学
王志海、舒敬萍
应申舜、谭大鹏
彭衍科、王泓晖、苏常伟、郑志同、 张勤河、陈言俊 郑一豪
作品名称 高楼往复逃生器 高楼救援逃生装置 地震中的文物自动保护装置 燃气泄漏安全保护系统 家用燃气安全卫士 多功能变支点自支撑可组装式撬杠 破障钳 新型液压剪扩器 抗震救灾多功能组合铁锹
所在学校 福州大学 西南交通大学 长春理工大学 河南农业大学 长安大学 海军工程大学 华中科技大学 成都大学 太原理工大学 北京理工大学 国防科学技术大学 中国地质大学(武汉) 三峡大学
参赛者 沈贺文、王根发、王双超、苏 翔、 蔡英杰 卢学梁
指导教师
周国豪、刘华森、赵春霞、徐萍、 高宏力、谢进 赵卫、 房梁、李先鹏、陈露、訾惠宇、 郑龙 黄建行、张关华、翟玉虎、卢伊 凡、张广伟 刘仁、高燕雯、王泽龙、严瑞、 郭宝余 刘树衎、卢劲涛、李泓成、黄磊 明、连阿民 李晓舟、高艺 李燕、李祥付 宋绪丁、魏立基 江汉红、郭尚芬
作品名称 地震搜救机械蛇 东大红太阳救援机器人 多功能液压救援机器人
所在学校 北京理工大学 东南大学 东北大学
地震救援机器人设计说明书
地震救援机器人设计说明书所在学校:昆明理工大学所在学院:机电工程学院项目成员:黄青青杨正利李超杨帆指导教师: 吴海涛地震救援机器人设计说明书目录一.作品简介 (1)二.主要功能指标 (2)三.工作原理 (3)四.运动分析 (4)五.实现的可能性 (6)六.创新点 (6)七.应用前景 (6)八.作品部分片 (7)九.参考文献 (9)一.作品简介地震救援机器人是基于地震救灾为背景而设计研发的,是一种能够起清障作用、探索救援道路的先进设备。
该作品具有灵活、操作简便、适用性强、拓展功能多的特点,非常适用于救灾抢险工作。
高度智能化和自动化是本作品的又一大特点,也是具备强势竞争力的一大优势。
同时,采用了先进的控制系统和算法,是系统的通用性和适用性进一步增强,能够出色完成各项任务。
本作品由中心搭载平台,六条安装在平台左右两侧的机械腿,以及构建在平台上的挖掘机械手组成。
机械腿由关节电机带动实现腿部移动,由安装在左右两侧的齿轮和连杆机构实现腿部伸缩,左右两侧各三条腿依次移动后,机器人的整体也完成一次前移。
达到预定位置后由平台上的气泵带动整个挖掘装置的完成挖掘动作,起到了除障清路的作用。
同时腿部结构设计比较先进,使机械体具有一定的越障能力,摆脱了传统救灾设备在灾后道路上行动能力不足的缺陷,对灾区环境有很强的适应能力。
二.主要功能指标该机器人是着眼于地震灾区的各类救援任务而开发的,其独树一帜的外形设计和结构设计使其能够遂行地震灾区的各种搜救、援助、运输、支承等任务。
首先,机器人的中心搭载平台采用模块化设计,可以根据实际任务需要即时更换设备进行搜救工作。
机器人腿部结构设计比较先进,使机械体具有一定的越障能力,能够更好地适应灾后的地形地貌以及道路情况,能够在一定程度上避免救援人员在危险区域受到潜在威胁,可以在最短时间开辟救援通道,最大限度的提高灾区被困者的解救及存活概率。
其次,在执行援助任务时,通过对机器人的中心搭载平台进行面积优化工作,令其携带不同的人物模块组件,以执行不同情况下的援助任务。
沈飞的雪鸮方案
1. 引言雪鸮是一种雪地迷航救援机器人,可以在恶劣的天气条件下执行检查、搜救和定位任务。
它由沈飞公司设计和制造,采用先进的机器视觉和自主导航技术。
本文将介绍沈飞的雪鸮方案,包括机器人的设计、功能和性能特点。
2. 设计概述雪鸮的设计理念是能够快速适应各种高海拔、寒冷和险恶环境条件。
它采用轻量级复合材料结构,具有良好的机动性和耐用性。
机器人的外部覆盖物采用防水和防冰处理,以确保在极低温度下仍能正常工作。
雪鸮的形状和尺寸类似于一只猫头鹰,具有优秀的视觉感知能力。
它配备了高清摄像头、红外线传感器和激光雷达,能够实时获取周围环境信息。
机器人还采用了先进的图像处理算法,可以识别并追踪目标物体。
3. 功能特点3.1 自主导航雪鸮配备了全球定位系统(GPS)和惯性测量单元(IMU),能够实现高精度的自主导航。
机器人使用先进的导航算法来规划路径和避开障碍物。
在恶劣的天气条件下,它可以通过图像处理和激光雷达来实时感知环境,并做出相应的导航决策。
3.2 通信和数据传输雪鸮可以通过无线网络与基地站进行通信,实现数据传输和指令交互。
它还配备了可调节功率的无线电发射器,能够扩大通信范围。
3.3 任务执行雪鸮可以执行多种任务,包括检查设备状态、搜寻失踪人员和定位目标物体。
机器人搭载的摄像头和传感器可以实时监测和记录任务执行过程中的关键信息。
3.4 智能决策雪鸮具备一定的智能决策能力,可以根据任务需求和环境条件做出相应的决策。
例如,在搜寻救援任务中,它可以通过机器视觉技术迅速确定潜在的目标区域,并选择最佳的路径进行搜索。
4. 性能参数以下是雪鸮的一些性能参数:•最大行驶速度:10 km/h•最大爬坡能力:30°•巡航时间:2小时•最大通信距离:5公里•工作温度范围:-20°C至40°C5. 应用领域雪鸮可以广泛应用于以下领域:•雪地迷航救援:在雪地迷航救援中,雪鸮可以通过自主导航和图像识别技术,帮助救援人员定位和搜寻失踪者。
多功能救援机器人

多功能救援机器人作者:汪航超李凯乐沈远航来源:《科学与财富》2016年第16期中国在十一五期间,已经将“废墟搜索与辅助救援机器人”项目列入国家863重点项目,由中科院沈阳自动化所机器人学国家重点实验室与中国地震应急搜救中心联合承担研制,并成功研制出“废墟可形变搜救机器人、机器人化生命探测仪、旋翼无人机”三款机器人。
这三款机器人曾经被国家地震局评为十一五以来最具应用实效的10项科技成果之一。
日本一些科学家研制出一种可以在废墟中爬行的机器人,他们可以承担营救被困于地震废墟中的幸存者重任。
但是目前市场上救援机器人适用性单一,造价不菲。
本文将提出一种多功能救援机器人,可应用于火灾,地震,森林搜救等场景,采用自动控制和手动控制两种方式,实现无线数据传输,生命信息定位等功能。
多功能救援机器人以履带作为骨架,兼以80c51单片机的主控系统,结合无线视频传输、生命信息及时定位等技术,实现对事故现场环境的检测。
同时,多功能救援机器人利用各种传感器,如温度传感器、气体浓度传感器、超声波传感器、红外传感器等,经过数据采集数据处理和数据输出,完成对事故现场环境检测如温度、湿度二氧化碳浓度的采集。
可通过无线技术与移动设备连接,实现手动控制和自动控制,更加具有实用性、灵活性,更加人性化、智能化。
多功能机器人应用范围广,可广泛用于火灾、地震、森林搜救等多种场景。
系统整体设计包括以下结构1、MCU芯片采用加强型51单片机STC12C5A60S2单片机,除了具有52单片机的全部功能外,还有丰富的外设,包括3个时钟输出口,外部中断I/O口7路,传统的下降沿中断或电平触发中断,并新增支持上升沿中断的PCA模块,power down模式可由外部中断唤醒,有两路PWM,A/D转换。
2、循迹模块采用四只TRCT红外对管,分别置于小车车身前轨道的两侧,根据两只光电开关接受到白线与黑线的情况来控制小车转向来调整车向。
3、由于进入障碍区之后,只要判断小车的前方和偏左方向有无障碍即可,所以障碍物的检测采用反射式光电传感器。
救援机器人毕业设计

救援机器人毕业设计
随着自然灾害和人为事故的频繁发生,救援机器人逐渐成为重要的援助工具。
本篇毕业设计旨在设计一种多功能的救援机器人,以便在各种紧急情况下提供必要的援助。
设计思路:
1. 结构设计:
救援机器人的结构需要面对各种不同的环境,包括火灾、地震、洪水等。
因此,它的结构需要具有耐高温、防水、防震等特性。
机器人装备有多个机械臂,能够在不同的场景下进行有效的操作,例如搜寻被困者、拯救伤员等。
2. 传感器设计:
救援机器人装配有多种传感器,包括温度传感器、气体传感器、声音传感器等。
这些传感器能够帮助机器人辨识出各种环境中的问题,并提供相关的信息。
例如,在火灾中,机器人可以利用传感器来检测房屋内的温度和任何潜在的危险。
3. 程序设计:
机器人需要具有一定的智能,能够根据环境的变化做出正确的反应。
机器人配备了多个算法,例如对象检测、运动规划等,能够在不同的场景下做出正确的决策。
4. 发电机:
机器人配备了太阳能发电机,以保证在没有电力供应的情况下,机器人仍能正常运作。
此外,机器人还配备了备用电池,以提供额外的能量储备。
结论:
在救援工作中,救援机器人可以发挥重要作用。
设计一种多功能的救援机器人,能够帮助消防员、医生等工作人员有效地解决紧急情况下的问题。
在未来,随着技术的发展,救援机器人将会变得更加先进和智能化。
地震多功能救援机器人设计
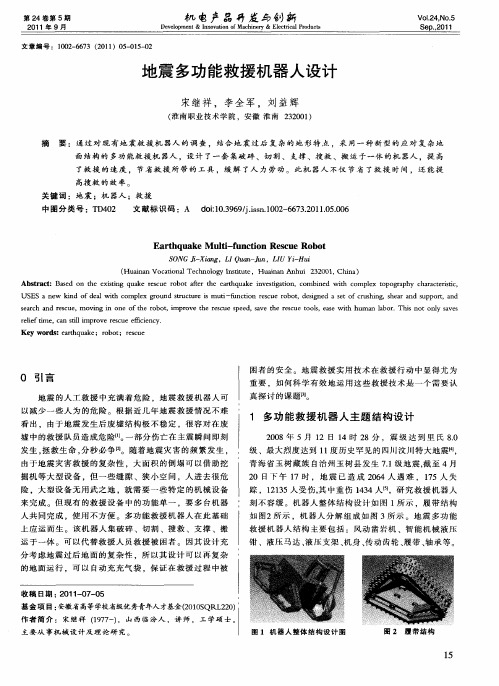
人共 同完成 ,使 用 不方 便 。多 功能 救 援机 器人 在 此基 础 如 图 2所 示 ,机 器 人 分 解 组 成 如 图 3所 示 。地 震 多 功 能
上 应运 而 生 。该机 器 人集 破 碎 、切割 、搜 救 、支 撑 、搬 救 援 机 器 人 结 构 主 要 包 括 :风 动 凿 岩 机 、智 能 机 械 液 压
关 键 词 :地 震 ;机 器人 ;救 援 中 图 分 类 号 :TD402 文 献 标 识 码 :A doi:10.3969/i.issn.1002—6lti-function Rescue Robot SONG Ji-Xiang,LI Q —Jun,L1U Yi—Hui
第 24卷 第 5期 2011年 9月
机 电 产 品 开 发 与 新
Development& Innovation of M achinery & Electrical Products
文 章 编 号 :1002—6673 (2011)05—015—02
地震 多功能救援机 器人设计
VOI.24,NO.5 Sep.,201 1
由于地 震灾 害救 援 的 复杂性 ,大面 积 的倒 塌 可 以借助 挖 青 海 省玉 树藏 族 自治州 玉树 县 发生 7.1级 地震 ,截 至 4月
掘机 等 大 型设 备 ,但一 些 缝 隙 、狭 小 空 间 ,人 进 去很 危 20 日 下 午 17时 ,地 震 已 造 成 2064 人 遇 难 , 175人 失
0 引 言
困者 的 安全 。地 震救 援 实用 技 术在 救援 行 动 中显 得尤 为 重要 .如何 科学 有 效地 运 用这 些 救援 技术 是 一个 需要 认
地 震 的 人 工 救 援 中 充 满 着 危 险 .地 震 救 援 机 器 人 可 真探 讨 的课题[31。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2013 届本科毕业设计(论文)文献综述
题目一种多功能搜救机器人的设计
学院电气与自动化工程学院
3.研究内容
本课题设计研究一种多功能搜救机器人,研究了机器人的机械结构、外围电路,软件时序研究及基于单片机的多路舵机控制方法研究,具体包括:
(1)机器人机械结构设计:包括机械装置设计,机械强度测验等,保证搜救机器人有较好的越野性和抗震能力;
(2)外围电路设计:包括电源供应,光检测电路,热释电红外人体检测电路及烟雾报警电路等;
(3)软件时序研究:涉及到舵机的控制信号周期,温度检测元件,电机启动惯性导致的迟滞效应等,这些在调试中出现不少困难,需单独研究;
(4)多路舵机控制算法:讨论算法的选择及具体设计思路。
4.算法选择
FPGA、模拟电路、单片机都可以产生舵机的控制信号,但FPGA成本高且电路复杂。
对于脉宽调制信号的脉宽变换,常用的一种方法是采用调制信号获取有源滤波后的直流电压,但是需要50Hz信号,这对运放器件的选择有较高要求,从电路体积和功耗考虑也不应采用。
5mV以上的控制电压的变化就会引起舵机的抖动,对于机载的测控系统而言,电源和其他器件的信号噪声都远大于5mV,所以滤波电路的精度难以。