第08章 数字摄影测量基础
第八章 全数字摄影测量基础

三. 基于灰度的数字影像相关方法
协方差法
搜索同名像点的过程与相关系数法基本相同,不 同点在于采用的相关性判据不同,前者采用协方 差值作为相似性判据。
σ gg '
1 n n 1 = ∑ g i g 'i + k − gg ' 或 σgg' = 2 ∑∑gij g'i+k, j+h −gg' n i=1 j=1 n i =1
二. 基于灰度的数字影像相关
2.一维相关 一维相关
目标区
搜索区
三. 基于灰度的数字影像相关方法
相关系数法
设g代表目标区点组的灰度值, ' 代表搜索区内 g 相应点组的灰度值,则每个点组共取n个点的灰 度值的均值 两个点组的方差 σ gg、σ g 'g '
1 g = n
∑
i =1
n
1 gi , g '= n
二. 数字影像及获取方法
数字影像表达形式
g0,0 g0,1 ⋯ g0,n−1 g g1,1 ⋯ g1,n−1 1,0 g = ⋮ ⋮ ⋮ gm−1,0 gm−1,1 ⋯ gm−1,n−1
x = x0 + i ⋅ ∆ y = y0 + j ⋅ ∆ (i = 0,1,⋯n −1) ( j = 0,1,⋯m −1)
l n l n i = i0 − + , ⋅ ⋅ ⋅, i 0 + − 2 2 2 2 = max ρ ij k m k m j = j0 − + , ⋅ ⋅ ⋅, i 0 + − 2 2 2 2
则认为(c, 为同名点 此处, , 。 为同名点。 则认为 ,r)为同名点。此处,i=4,j=4。
数字摄影测量学备课教案

数字摄影测量学备课教案第一章:数字摄影测量学概述教学目标:1. 了解数字摄影测量学的定义和发展历程。
2. 掌握数字摄影测量学的基本原理和应用领域。
教学内容:1. 数字摄影测量学的定义和发展历程。
2. 数字摄影测量学的基本原理。
3. 数字摄影测量学的应用领域。
教学方法:1. 讲授法:讲解数字摄影测量学的定义、发展历程、基本原理和应用领域。
2. 案例分析法:分析数字摄影测量学在实际工程中的应用案例。
教学资源:1. 教材:数字摄影测量学教程。
2. 课件:数字摄影测量学概述。
3. 案例图片:数字摄影测量学在实际工程中的应用案例。
教学过程:1. 引入话题:介绍数字摄影测量学的定义和发展历程。
2. 讲解基本原理:讲解数字摄影测量学的基本原理。
3. 讲解应用领域:讲解数字摄影测量学在实际工程中的应用领域。
4. 案例分析:分析数字摄影测量学在实际工程中的应用案例。
5. 总结:总结本节课的重点内容。
教学评价:1. 课堂讲解:评价学生对数字摄影测量学的基本原理和应用领域的掌握情况。
2. 案例分析:评价学生对数字摄影测量学在实际工程中的应用能力的掌握情况。
第二章:数字摄影测量学的基本原理教学目标:1. 掌握数字摄影测量学的基本原理。
2. 了解数字摄影测量学的基本方法。
教学内容:1. 数字摄影测量学的基本原理。
2. 数字摄影测量学的基本方法。
教学方法:1. 讲授法:讲解数字摄影测量学的基本原理和方法。
2. 互动教学法:引导学生参与讨论和提问。
教学资源:1. 教材:数字摄影测量学教程。
2. 课件:数字摄影测量学的基本原理。
3. 案例图片:数字摄影测量学的基本方法在实际工程中的应用案例。
教学过程:1. 复习上节课的内容:回顾数字摄影测量学的定义和发展历程。
2. 讲解基本原理:讲解数字摄影测量学的基本原理。
3. 讲解基本方法:讲解数字摄影测量学的基本方法。
4. 案例分析:分析数字摄影测量学的基本方法在实际工程中的应用案例。
5. 总结:总结本节课的重点内容。
第八章 数字摄影测量基础PDF

灰度: D = log O = log 1
T
二、数字影像及获取方法
数字影像是一个灰度矩阵g:
⎡ g0,0
g0,1
"
g
=
⎢ ⎢
g1,0
⎢#
g1,1
"
#
⎢
⎢⎣ gm−1,0 gm−1,1
"
g0,n-1 ⎤
g1,n−1
⎥ ⎥
#⎥ ⎥
gm−1,n−1 ⎥⎦
每个像元素 g j,i 是一个灰度值 每个元素称为一个像元素(对应着实体的一个微小区域)
字 化
x = h0 + h1 x + h2 y
的 步
进
y = k0 + k1x + k2 y
方 向
h0,h1,h2,k 0,k1,k 2
y
o
x
内定向参数,利用四个框标
点平差解算
O
数字化的扫描方向
x
影像重采样理论 非
采
样
•••••
点
• • •• • •
的
••••• •••••
灰 度 ?
•••••
五、数字影像重采样
39 40 66 159 251 252 159 127
数字影像的获取:
9采样 9 量化 采样:每隔一个间隔 Δ 获取一个 点的灰度值 。 对实际连续函数模型离散化的量测 过程 样点 被量测的“点”是小的区域,通常是矩 形或正方形的的微小影块----像素
采样间隔 Δ
矩形的长与宽通常称为像素的大小 9 精度要求 9 影像分辨率 9 数据量
Δx=Δy : 采样间隔
0 39 127 251 251
摄影测量学 8 数字摄影测量68页PPT

1、纪律是管理关系的形式。——阿法 纳西耶 夫 2、改革如果不讲纪律,就难以成功。
3、道德行为训练,不是通过语言影响 ,而是 让儿童 练习良 好道德 行为, 克服懒 惰、轻 率、不 守纪律 、颓废 等不良 行为。 4、学校没有纪律便如磨房里没有水。 ——夸 美纽斯
5、教导儿童服从真理、服从集体,养 成儿童 自觉的 纪律性 ,这是 儿童道 德教育 最重要 的部分 。—自命不凡。——邓拓 12、越是无能的人,越喜欢挑剔别人的错儿。——爱尔兰 13、知人者智,自知者明。胜人者有力,自胜者强。——老子 14、意志坚强的人能把世界放在手中像泥块一样任意揉捏。——歌德 15、最具挑战性的挑战莫过于提升自我。——迈克尔·F·斯特利
全数字摄影测量基础
0
V1
( g1i,1 g1i1,1 ) 2
i 1
0
V2
( g1i,1i g1i 1,1i1 ) 2
i 1
0Leabharlann V3 ( g1,1i g1,1i1 ) 2
i 1
V4
0
( g1i,1i
g1i 1,1i 1 ) 2
i 1
IV=0 IV=50
* Harris算子
M
I Ix
2 x
• 数字量与模拟量的本质区别在于模拟量是连续变量而数字 量是离散变量。
• 影像数字化 1、空间采样
o( x0 , y0 )
y x
x x0 i x(i 0,1..., n 1) y y0 j y( j 0,1,...m 1)
像元(pixel)
2、量化
• 影像的灰度又称为光学密度,在摄影底片上,影像的灰度值 反映了它透明的程度,即透光的能力。设投射在底片上的光通 量为F0,而透过底片后的光通量为F。则透过率T为:T=F/F0
y
B
x f (x, y)
f (i 1, y)
y
f (i, j 1)
在x方向,以f (i, y)和f (i 1, y)为边组成的梯形来内插f (x, y) : f (x, y) x f (i 1, y) (1 x) f (i, y) f (x, y) (1 x)(1 y) f (i, j) (1 x)y f (i, j 1) x(1 y) f (i 1, j) xy f (i 1, j 1)
“灰度差的平方和最小”
S 2 X Y 2 ( x1 y1 )2 ( x2 y2 )2 .... ( xN yN )2 min
vv min
仅仅认为影像灰度只存在偶然误差
数字摄影测量系统
第八章 数字摄影测量系统
§2.8.1 数字摄影测量系统
数字摄影测量系统的任务是利用数字影像或数字化影像完 成摄影测量作业。
根据所处理的影像是部分数字化还是全部数字化可分为混 合型( hybrid)数字摄影测量系统与全数字型数字摄影测量 系统。
在全数字型数字摄影测量系统中,若从影像获取到影像处 理获取目标的三维信息是在一个视频周期(1/30s)内完成, 则属于实时型数字摄影测量系统。
§2.8.1 数字摄影测量系统 四、软件
数字摄影测量系统的软件实际上是解析摄影测量软件与数字 图像处理软件的集合,其主要部分为: 1.定向参数的计算
10
第八章 数字摄影测量系统
§2.8.1 数字摄影测量系统
三、硬件
一般情况下,一台实用数字摄影测量系统的计算机应具有 不低于33MIPS与6MFLOPS的处理速度,配备32MB以上 的内存与1GB以上的硬盘及海量外存贮器(磁带机或光 盘),24bit彩色图像处理板(若希望有动画功能还应带有 Z-buffer)。
8
第八章 数字摄影测量系统
§2.8.1 数字摄影测量系统 三、硬件
9
第八章 数字摄影测量系统
§2.8.1 数字摄影测量系统 三、硬件
数字摄影测量系统主要由两部分构成:一部分是数字影像 获取装置与成果输出设备;另一部分(也是其核心部分) 是一台计算机及其他外设。实际上,数字影像获取与输出 设备也是计算机的外设。
6
第八章 数字摄影测量系统
§2.8.1 数字摄影测量系统
二、作业方式
1.自动化与人工干预
在自动化作业状态下“作业”,应无须任何人工干预。系统无 法处理的问题应自动记录下来留给人工进行后处理,而不能因 此使整个系统停止工作去等待人工干预,系统应能继续正常地 运行下去。人工干预应是自动化处理的“预处理”与“后处 理”。这就意味着:自动化的作业过程与人工干预不是一个交 互的过程,而是分开来的两个部分。人工干预作为自动化系统 的“预处理”与“后处理”以交互方式为自动化作业作准备, 如必要的数据准备、必要的辅助量测工作等及处理自动化过程 所残留的尚无法解决的问题。按此策略设计的数字摄影测量系 统,虽还需要“人工干预”,但它采用批处理方式,能充分发 挥系统的效率。
数字摄影测量学备课教案

数字摄影测量学备课教案第一章:数字摄影测量学概述1.1 摄影测量的定义与发展历程1.2 数字摄影测量的基本原理1.3 数字摄影测量学的应用领域1.4 数字摄影测量学的基本概念第二章:数字图像处理基础2.1 数字图像的获取与表示2.2 数字图像处理的基本算法2.3 图像增强与复原2.4 图像分割与特征提取第三章:数字摄影测量数据处理3.1 摄影测量数据的类型与结构3.2 数据预处理方法3.3 摄影测量模型与参数估计3.4 误差分析与数据平差第四章:数字摄影测量软件与应用4.1 数字摄影测量软件的分类与功能4.2 常见数字摄影测量软件介绍4.3 数字摄影测量软件的操作与应用实例4.4 数字摄影测量软件的发展趋势第五章:数字摄影测量在地理信息系统中的应用5.1 地理信息系统概述5.2 数字摄影测量在地理信息系统中的作用5.3 数字摄影测量在地图制图与更新中的应用5.4 数字摄影测量在土地管理与规划中的应用第六章:数字摄影测量中的光学与几何学基础6.1 光学基础6.2 摄影几何学6.3 相机标定6.4 立体像对的匹配与重建第七章:数字摄影测量中的数值计算方法7.1 数值计算方法概述7.2 最小二乘法7.3 非线性优化算法7.4 数值稳定性与误差分析第八章:数字摄影测量中的模型与参数估计8.1 摄影测量模型8.2 参数估计方法8.3 最大似然估计与最小二乘估计8.4 模型不确定性分析第九章:数字摄影测量中的数据采集与处理9.1 数据采集设备与技术9.2 数据预处理方法9.3 数据融合与信息提取9.4 数据质量控制第十章:数字摄影测量在工程测量中的应用10.1 工程测量概述10.2 数字摄影测量在建筑工程测量中的应用10.3 数字摄影测量在地形测量中的应用10.4 数字摄影测量在矿山测量中的应用第十一章:数字摄影测量在环境监测中的应用11.1 环境监测概述11.2 数字摄影测量在植被监测中的应用11.3 数字摄影测量在水体监测中的应用11.4 数字摄影测量在滑坡与地质灾害监测中的应用第十二章:数字摄影测量在文化遗产保护中的应用12.1 文化遗产保护概述12.2 数字摄影测量在古建筑测量中的应用12.3 数字摄影测量在考古发掘中的应用12.4 数字摄影测量在数字化展示中的应用第十三章:数字摄影测量在军事与安全领域的应用13.1 军事与安全领域概述13.2 数字摄影测量在目标识别与监视中的应用13.3 数字摄影测量在战场环境模拟中的应用13.4 数字摄影测量在安全监控与环境监测中的应用第十四章:数字摄影测量的发展趋势与展望14.1 数字摄影测量技术的发展趋势14.2 数字摄影测量与其他技术的融合14.3 数字摄影测量在新型领域的应用前景14.4 数字摄影测量学的挑战与机遇第十五章:实验与实践15.1 数字摄影测量实验概述15.2 摄影测量数据的采集与处理实验15.3 数字摄影测量软件操作实验15.4 数字摄影测量在实际项目中的应用案例分析重点和难点解析重点:1. 数字摄影测量学的基本原理和概念。
8第八章 数字摄影测量基础
v
问题的提出:数字影像只记录采样点的灰度级值,当所求像 点不落在原始像片上像元素的中心(非采样点),要获取非 采样点的灰度值,就要在原采样的基础上再一次采样,即重 采样(resampling) (内插) 方法:最邻近像元法、双线性插值法、双三次卷积法 2
n最邻近像元法:直接取与非采样点位置最近像元的灰度值 1 I ( P ) = I ( N ) 非采样点P ( x, y ) 的灰度 x N = INT ( x + 0.5) N为最近点,其像素坐标值为: y N = INT ( y + 0.5) 缺点:最大误差可达±0.5像元 ,几何精度较差 3 优点:最简单,计算速度快且不破坏原始影像的灰度信息
线 性 化
△x
& 2 ( x) • ∆x − [ g1 ( x) − g 2 ( x)] g & 2 ( x) = v( x) = g ∆为采样间隔,令g1 ( x) − g 2 ( x)=∆g
按最小二乘原则: ∑ vv = ∑ (n1 ( xi ) −n2 ( xi )) 2 = min
g2 ( x + ∆) − g2 ( x − ∆) 2∆ & 2 • ∆x − ∆g 误差方程:v = g
4
n双线性插值法 设非采样点P邻近的4个原始像元的灰度为 I 11、I 12、I 21、I 22
y1 y212源自△xyx111
△y
P
x2
x
21
22
特点:计算较费时, 精度较好
P点的灰度重采样值为:
I ( P ) = (1 − ∆ x )(1 − ∆ y ) I 11 + (1 − ∆ x ) ∆ yI 12 + ∆ x (1 − ∆ y ) I 21 + ∆ x∆ yI 22
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
地物:全部人工交互;道路、房屋:半自动
§8-2 数字影像与影像重采样
数字摄影测量基本特点:用数字影像替代光学-胶片 的影像
数字图像的表示
一个数字影像可用一个函数表示: g(x,y)
y
y
g y
x
x
x
灰度是坐标的函数
像元素的点位坐标(扫描坐标)
0 40 127 255 255
x = x0 + i x (i = 0,1, 2, , n 1) 40 66 127 255 255
y = y0 + j y ( j = 0,1, 2 , m 1) 39 40 127 255 251
数字影像的获取:
灰度值如果用实数表示,一幅数字影像的存储空间将非常 大,为解决这一问题,实际应用时需要进行量化处理
量化:将各点的灰度值转换为整数 ,将透明底片有可能出现 的最大灰度变化范围进行等分,分为若干灰度等级,一般都 取为 2m ,m = 8 时得到256个灰度级,其级数是介于0到255 之间的一个整数,0为黑,255为白,每个像元素的灰度值占 8bit,即一个字节
发展历程:
1950年由美国工程兵研究发展实验室与Gausch and omb 光学仪器 公司合作研制了第一台自动测图仪,利用电子相关技术实现自动量测
60年代初开始利用数字相关技术,80年代数字相关占统治地位
88年,数字摄影测量系统处概念阶段
92年,数字摄影测量系统步入生产阶段
目前,已成为主流的摄影测量作业方法(半自动化)
最邻近像元法:直接取与非采样点位置最近像元的灰度值
非采样点P ( x, y) 的灰度 I ( P) = I ( N )
1
2
N为最近点,其像素坐标值为: x N = INT ( x + 0.5) y N = INT ( y + 0.5)
缺点:最大误差可达±0.5像元 ,几何精度较差 3
4
优点:最简单,计算速度快且不破坏原始影像的灰度信息
彩色图像的分波段直方图
三、数字影像的内定向:
问题的提出:经典的摄影测量已经建立了一整套像点坐 标与对应的物点坐标间的关系,只要确定扫描坐标系与 像平面坐标系之间的关系(内定向)就能利用原有理论
y
内定向的目的:确定扫描坐标 系和像片坐标系之间的关系
两种坐标之间存在仿射变换
数 字
化
x = h0 + h1 x + h2 y
x=y : 采样间隔
0 39 127 251 251
数字图像一些知识:直方图的意义
灰度直方图是灰度级的函数 其横坐标是灰度级,纵坐标是该灰度出现的频率(像素个数)。
举例:大小为196×210,灰度级为28=256的一幅bmp图像。
举例:大小为640×480,灰度级为28=256的一幅bmp图像
灰度图像的直方图
g0,0
g0,1
g = g1,0
g1,1
gm 1,0 gm 1,1
g0,n-1
g1,n 1
gm 1,n 1
每个像元素 g j ,i 是一个灰度值 每个元素称为一个像元素(对应着实体的一个微小区域)
A= imread('e:\matlab test\gray','bmp')
39 0 40 127 255 255 159 98 40 40 66 127 255 255 158 94 39 39 40 127 255 251 127 95
数字影像?
一、影像灰度
灰度:光学密度,影像的灰度值反映了像片的透光能力
透过率: T = F
F0
不透过率
F0
(阻光率): O = F
F0 投射在底片上的光通量 F 透过底片的光通量
人眼对明暗程度的感觉是按阻光率的对数关系变化的
灰度: D = log O = log 1
T
二、数字影像及获取方法 数字影像是一个灰度矩阵g:
y ) I 21 +
§8-3 基于灰度的影像相关
x1 y1 x2 y2 观测量
?
X Y Z 未知量
机器代替人眼 识别同名点
的
步
y = k 0 + k1 x + k 2 y
进 方
h0,h1,h2,k 0,k1,k 2
向
y
o
x
内定向参数,利用四个框标
点平差解算
x
O 数字化的扫描方向
影像重采样理论
非
采
样
点
的 灰 度
?
五、数字影像重采样
问题的提出:数字影像只记录采样点的灰度级值,当所求像 点不落在原始像片上像元素的中心(非采样点),要获取非 采样点的灰度值,就要在原采样的基础上再一次采样,即重 采样(resampling) (内插) 方法:最邻近像元法、双线性插值法、双三次卷积法
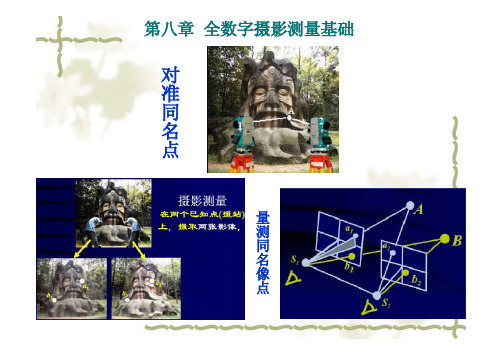
像点坐标观测:在人眼的立体观察下,对准同名像点进行量测
自动观测?
第八章 全数字摄影测量基础
§8-1 概述
模拟、解析:在人眼的立体观察下,对准同名像点进行量 测,目视判别属性
摄影测量自动化?
数字摄影测量:自动识别同名像点,自动量测,自动提 取与识别属性
数字摄影测量:利用数字灰度信号(数字影像),采用数字 相关技术量测同名像点,在此基础上通过解析计算,进行相 对定向和绝对定向,建立数字立体模型,从而建立数字地面 模型、绘制等高线、制作正射影像图以及为地理信息系统提 供基础信息等。是摄影测量自动化的必然产物
0 0 39 127 251 127 94
39 0 40 159 251 212 158 127
39 40 66 159 251 252 159 127
数字影像的获取:
采样 量化 采样:每隔一个间隔 Δ获取一个 点的灰度值 。 对实际连续函数模型离散化的量测 过程 样点 被量测的“点”是小的区域,通常是矩 形或正方形的的微小影块----像素 采样间隔 Δ 矩形的长与宽通常称为像素的大小 精度要求 影像分辨率 数据量
双线性插值法
设非采样点P邻近的4个原始像元的灰度为 I11、I12、I 21、I 22
y1
y2
y
x1
11
12
△x
△y
P
x2
x
21
P点的灰度重采样值为:
特点:计算较费时, 精度较好
22
I ( P ) = (1 x )(1 y ) I 11 + (1 x ) yI 12 + x (1
双三次卷积法(三次样条函数) 特点:算法最严密,最费时