免棱镜全站仪主要技术参数
隧道施工测量中全站仪免棱镜测距技术应用分析
隧道施工测量中全站仪免棱镜测距技术应用分析摘要:目前我国工程测量常用的测量仪器就是全站仪,因为它能实现自动化、快捷化、准确化的定位测量。
在隧道施工测量中,大多以全站仪进行控制测量,很少会实施隧道施工测量。
本文以某高速工程隧道为依托,探讨隧道施工测量中全站仪免棱镜测距技术的应用,分析其优越性。
关键词:隧道施工;测量;全站仪;免棱镜测距技术Abstract: at present our country engineering measurement common measuring instrument is tachometer, because it can realize the automation, high-speeding, accurate positioning measurement. In the measurement of the tunnel construction, mostly with is introduced.the control measurement, and rarely implement tunnel construction survey. Taking a high-speed project based on tunnel, this paper discusses measurement of the tunnel construction tachometer prism ranging from the use of technology, analyzes its advantage.Keywords: tunnel construction; The survey; Tachometer; Avoid prism location technology全站仪全称全站型电子速测仪,集机、光、电等为一体的高技术测量仪器,结合光学经纬仪,能实现垂直角、水平角、平距、斜距和高差测量,因此在各个行业的测量工作中被广泛应用。
宾得R202NE进口免棱镜全站仪

PENTAX R-200系列全站仪R-202NE/R-202NE(POWER)高性能普及型中文数字全站仪为满足国内市场需求,普及全站仪的使用,日本宾得推出牢固可靠、高性能、更方便,价格适中的新一代R-200 系列全站仪。
现为国内唯一普及价位、免棱镜、全中文进口品牌全站仪。
性能特点PENTAX光学系统:超级多层镀膜镜头,保证了清晰和精确的照准免棱镜测量:除具有棱镜、反射片测量模式外,还具有免棱镜测距350米数字输入键盘:快速输入数字、字母及其它特殊字符可视激光指示:使照准目标更快、更容易,也方便在隧道、夜晚等光线微弱环境中工作激光对中:可调节激光强度,使仪器架设对中更加方便绝对编码度盘:开机无需初始化,重新开机角度保持不变标准化电池:采用性价比高的标准化电池设计,增配方便大容量存储器:内存能存储20,000个测量点(XYZ),使用户可以有效的完成任何测量和检测作业内置功能强大的PowerTopolite软件最新加载道路软件模块(R-200NE机型)功能介绍绝对编码器采用绝对编码度盘操作更加方便由于具有绝对编码度盘,在开机后无需再上下转动测距部及仪器进行垂直度盘和水平盘初始化。
在作业中即使意外关机,开机后再观测,也无需再寻找基准方向。
大显示屏和键盘大幅面显示图形和文字十分便于操作本机装备了输入角度、坐标值、点号、高度、代码等所不可少的输入键。
尤其对于输入带文字字母的点名更加方便了。
大容量存储器仪器内存有20,000个测量点( XYZ),使用户可以有效地处理任何测量和检测任务。
每个测量项目(job)可以记录2,000 个点位(XYZ)。
用户可以建立多达20个项目文件。
激光对中由于激光对中的光点是可见的,并具有十阶两度调节,对中作业就变得十分简单。
发射垂直向下的激光,就可方便地进行对中作业。
在购买仪器时,可以要求改变为可选的光学对中器。
新照准器新型的十字丝型照准器为了尽快而较准确地寻找到目标,设计了新型的照准器(粗瞄方式)。
浅析免棱镜全站仪测距精度分析_余兵
INTELLIGENCE 科 技 天 地56浅析免棱镜全站仪测距精度分析深圳市长勘勘察设计有限公司 余兵摘 要:免棱镜全站仪在测量工程应用十分广泛,本文就免棱镜全站仪测距相关问题进行分析,重点详细分析了免棱镜全站仪测距实测精度分析,分别就材质、色彩、绝对精度、反射面透明度,以及激光束对网孔的穿透试验进行分析。
关键词:全站仪 免棱镜全站仪 测距原理 测距精度全站仪是一种集光电、计算机、微电子通讯、精密机械加工等高精尖技术于一体的先进测量仪器。
免棱镜全站仪是其中典型的代表。
免棱镜全站仪测距方法有两种:脉冲法和相位法。
免棱镜全站仪的种类繁多,但测距结构基本相似,这里以徕卡TCR 系列仪器为例,介绍免棱镜全站仪的测距结构。
TCR 系列的测距仪中有两个发射管,一个是用于测量反射棱镜或反射板的红外激光发射管,它发射的波长为780nm,用单棱镜可测3km,精度达到±(2mm+2 ×10-6D);另一个是用于免棱镜测量的红色激光发射管,它发射的波长为670nm,不用棱镜可测80m,精度达到± (3mm+2×10-6D )。
这两种测量模式的转换可通过仪器键盘上的操作控制内部光路来实现。
而且,两种测距方式的不同的常数改正会自动修正到测量结果上。
免棱镜测距(Reflectorless ),又称作无接触(Noncontact )测距,指的是全站仪发射的光束经自然表面反射后,直接测距。
测距误差可分为两部分:一部分是与距离D 成正比的误差,即光速值误差,大气折射率误差和测距频率误差;另外一部分是与距离无关的误差,即测相误差、加常数误差和对中误差。
周期误差有其特殊性,它与距离有关但不成比例,仪器设计和调试时可严格控制其数值,实用中如发现较大而且稳定,可以对测距成果进行改正,这里暂不顾及。
故一般测距精度表达式为:()D m A B D =±+⋅式中A 为固定误差;B 为比例误差系数;D 为被测距离。
建筑工程竣工测量中的免棱镜测量技术分析

建筑工程竣工测量中的免棱镜测量技术分析一般来说,一个建筑工程的竣工是需要进行测量验收的,在这个验收的过程中要按照原有的规划审批要求进行测量,其中建筑物之间的距离、建筑物的面积和高度的测量是不可缺少的。
随着时间的发展,现如今的建筑物相比之前的要更加的复杂,而审批的过程也更加的严格。
从测量人员的角度来看,测量的工作量更加的繁杂庞大,不仅仅要采集更多的数据,还要用专业的方法进行测量。
很显然,常规的测量方法已经满足不了现代建筑物测量的要求。
而全站仪的免棱镜测量技术的运用对于建筑物的测量无疑是一大帮助。
本文将对免棱镜进行详细的分析,并进一步探讨在建筑物测量中的运用。
标签:工程测量免棱镜技术分析0前言严格来说,建筑工程竣工规划验收的测量对于城市的规划管理具有重大的意义,是城市规划管理工作的一个重要的环节。
一个可靠地竣工测量成果需要的不仅仅是数据的采集,更重要的是测量部门在建设项目现场的实地考察,以确保验证的正确性。
随着时代的发展,建筑物的构造越来越复杂,相关部门的审批也日益严格。
对于那些需要精准的测量数据,如浇筑物的面积、高度与距离等都需要用全站仪的免棱镜测量技术进项测量,因为常规的测量方法已经满足不了新的技术要求。
1免棱镜全站仪测量原理我们可以发现,在常规的测量中,常用的全站仪是SET250RX,而免棱镜模式的仪器测距范围是零点三到四百米,测距的精度是零点三至二百米范围为三加二乘十的负六次方D毫米,200~350米范围是五加十乘以十的负六次方D毫米,350~400米范围为十加十乘以十的负六次方毫米,这些数据表明,免棱镜模式下的测量可以满足建筑物测量的新要求。
对边测量是免棱镜全站仪常用的方法之一,所谓对边测量也可以成为间接测量,也就是当建筑物的两点不能够进行直接测量的时候,就可以运用免棱镜进行间接测量。
具体来讲,就是将测量仪器放在两点之间,然后借用全站仪测量仪器与镜站之间的各个角度与距离,然后再计算两镜站之间的距离与高差。
索佳Sokkia_SET30R系列(230R_530R_630R)免棱镜全站仪使用说明书

测量仪器SET230RSET230R3SET530RSET530R3SET630R无协作目标电子全站仪V2.0-0412-500使用说明书承蒙购买索佳本系列电子全站仪, 对此甚感荣幸。
仪器使用前请详细阅读本使用说明书,并参阅“28.1标准配置”以确认所有附件是否齐全。
为便于阅读, 说明书中部分插图和显示内容做了简化处理。
为改进产品的性能和精度, 仪器的技术指标和外观 随时可能变化,恕不另行通知, 敬请谅解。
仪器软件会 定期更新,恕不另行通知。
具体事宜,可与各地经销商 或索佳测绘仪器贸易(上海)有限公司联系。
此说明书的编写,由于时间仓促,必有疏漏之处。
如发现疑问, 请与索佳测绘仪器贸易(上海)有限公司 联系。
Class 3Class Ⅲ激光产品Class 2Class Ⅱ激光产品iii10. 角度测量.........................................................................................27 10.1 两点间角度测量.....................................................................27 10.2 已知方向的设置.....................................................................28 10.3 水平角重复测量.....................................................................28 10.4 角度测量数据输出.................................................................30 11. 距离测量.........................................................................................31 11.1 返回信号强弱检测步骤.........................................................32 11.2 距离和角度测量 ...................................................................33 11.3 调阅测量数据.........................................................................34 11.4 距离测量数据输出.................................................................35 11.5 悬高测量..................................................................................36 12. 坐标测量.........................................................................................38 12.1 输入测站数据.........................................................................38 12.2 设置后视坐标方位角.............................................................40 12.3 三维坐标测量.........................................................................41 13. 后方交会测量 (42)1. 安全操作注意事项 ...........................................................................1 2. 注意事项 ............................................................................................5 3. 激光安全信息......................................................................................7 4. 仪器功能简介 ....................................................................................9 4.1 仪器部件名称.............................................................................9 4.2 模式图 ......................................................................................12 5. 基本操作 ..........................................................................................13 5.1 键基本操作 ................................................................................13 5.2 显示功能 ....................................................................................17 6. 电池的使用 ......................................................................................19 6.1 电池充电 ..................................................................................19 6.2 电池的装卸................................................................................20 7. 架设仪器............................................................................................21 7.1 对中............................................................................................21 7.2 整平............................................................................................22 8. 调焦与照准.......................................................................................25 9. 开机 .. (26)iii13.1 坐标后方交会测量.................................................................42 13.2 高程后方交会测量.................................................................45 14. 放样测量.........................................................................................48 14.1 角度和距离放样测量.............................................................48 14.2 坐标放样测量.........................................................................50 14.3 悬高放样测量.........................................................................52 15. 直线放样.........................................................................................53 15.1 定义基线 ................................................................................53 15.2 直线放样点 ...........................................................................55 15.3 直线放样线..............................................................................56 16. 点投影..............................................................................................58 16.1 定义基线..................................................................................58 16.2 点投影......................................................................................59 17. 偏心测量.........................................................................................60 17.1 单距偏心测量.........................................................................60 17.2 角度偏心测量.........................................................................62 17.3 双距偏心测量.........................................................................63 18. 对边测量.........................................................................................65 18.1 多点间距离测量.....................................................................65 18.2 改变起始点..............................................................................66 19. 面积计算.........................................................................................67 20. 存储数据.........................................................................................70 20.1 存储测站数据.........................................................................70 20.2 存储距离测量数据.................................................................71 20.3 存储角度测量数据.................................................................72 20.4 存储坐标测量数据.................................................................73 20.5 存储距离和坐标数据.............................................................74 20.6 存储注记数据.........................................................................74 20.7 调阅工作文件数据.................................................................75 21. 工作文件的选取与删除................................................................76 21.1 选取工作文件.........................................................................76 21.2 删除工作文件.........................................................................78 22. 已知数据的输入与删除................................................................79 22.1 已知坐标的输入与删除.........................................................79 22.2 调阅已知坐标.........................................................................82 22.3 属性码的输入与删除.............................................................82 22.4 调阅属性码..............................................................................83 23. 输出工作文件数据. (84)24仪器参数设置 (85)24.1 改变仪器参数 (85)24.2 键功能定义 (89)24.3 更改密码 (93)24.4 初始化 (94)25 双向数据通讯 (95)25.1 与计算机连接 (95)25.2 双向通讯指令及其数据格式 (96)26. 错误信息············································································10827. 检验与校正 (110)27.1 照准部水准器检校 (110)27.2 圆水准器检校 (111)27.3 倾斜传感器零点误差检校 (111)27.4 视准差检测 (114)27.5 分划板检校 (115)27.6 光学对中器检校 (116)27.7 距离加常数检测 (119)27.8 导向光 (120)28. 标准配置和选购附件 (122)28.1 标准配置 (122)28.2 选购附件 (124)28.3 棱镜系统 (126)28.4 电源系统 (128)29. 技术指标 (130)29.1 技术指标 (130)29.2 说明 (132)30. 规范 (133)31. 附加说明 (135)31.1 双盘照准设置垂直度盘指标位 (135)31.2 高精度测距气象改正 (136)31.3 电池使用说明 (137)31.4 保修条例 (139)iv1为确保安全操作,避免造成人员伤害或财产损失,本说明书使用“警告”和“注意”来提示应遵循的条款。
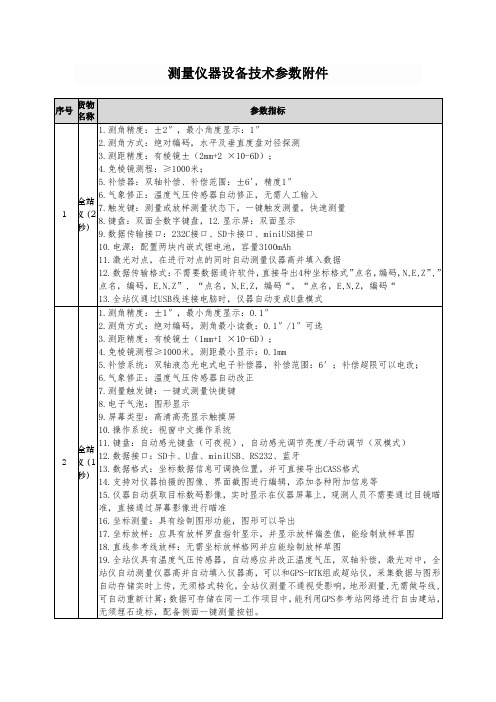
测量仪器设备技术参数
通讯和数据存储
蜂窝移动:WCDMA 3G网络通讯模块,兼容GPRS/EDGE;可定制CDMA2000/EVDO 3G通讯;蓝牙:BLEBluetooth 4.0蓝牙标准,支持android系统手机连接,Bluetooth 2.1 + EDR标准;支持NFC通信:采用NFC无线通信技术,平板与主机触碰即可实现蓝牙自动配对;外部通信:可选配外接GPRS/CDMA双模通讯模块,自由切换,适应各种工作环境;差分数据格式:CMR+、CMRx、RTCM 2.1、RTCM 2.3、RTCM 3.0、RTCM 3.1、RTCM 3.2输入和输出;语音:人性化语音提示
7.触发键:测量或放样测量状态下,一键触发测量,快速测量
8.键盘:双面全数字键盘,12.显示屏:双面显示
9.数据传输接口:232C接口、SD卡接口、miniUSB接口
10.电源:配置两块内嵌式锂电池,容量3100mAh
11.激光对点,在进行对点的同时自动测量仪器高并填入数据
12.数据传输格式:不需要数据通许软件,直接导出4种坐标格式”点名,编码,N,E,Z”,” 点名,编码,E,N,Z”, “点名,N,E,Z,编码“,“点名,E,N,Z,编码“
惯性传感系统
倾斜测量:内置倾斜补偿器,根据对中杆倾斜方向和角度自动校正坐标;电子气泡:内置感应器,软件可显示电子气泡,实时检查对中杆整平情况
★手簿内置软件部分:(提供软件截图证明)
1、手簿自带USB接口,内置软件能共享坐标系统、数据字典、轨迹文件、放样对象等功能的属性,达到统一标准化作业;能导入导出shp、dxf、svg、gcp、csv、dat、txt等各种矢量文件格式,支持img、tiff等影像数据格式;软件可以采集文本数据,支持多级菜单、单选框、多选框、图片、语音标注等属性数据的采集;可进行点、线、面的坐标和属性数据的编辑;具备地物查询、统计分析功能;具备图层管理功能,可以对图层进行上移下移,并能设置图层是否可见;软件在使用放样功能时,可以调用雷达模式、电子罗盘模式等,用户能更方便快捷地进行工程放样;提供数据模板编辑软件及说明书,具备完整的不动产数据采集功能。
免棱镜全站仪测量定位栈桥钢管桩

免棱镜全站仪测量定位栈桥钢管桩余国元一、引言免棱镜全站仪相对普通型全站仪而言,是指不照准反射棱镜、反射片等专用反射工具,直接照准测量目标即可测距的全站仪。
测绘行业很多厂家也称为无协作目标全站仪、无棱镜全站仪、免棱镜激光全站仪等。
免棱镜全站仪的主要优点:可免棱镜测距,适宜无法或不宜放置反射棱镜或者反射片的目标测量。
免棱镜测距再配以全站仪的其他固有功能,可以在工程测量中得到广泛的应用,如:测量危险及危害点、不可及目标、岩石表面、建筑物内部的顶部和墙面等对象。
广深沿江高速公路机场特大桥主线桥位于海中公沙水道,距机场三期防波堤600~750m,其中一段栈桥钢管桩的测量定位,使用的测量仪器是徕卡TCR1201+R1000型全站仪。
仪器标称的角度测量精度为1″,全站仪免棱镜测距主要参数见表1。
表1徕卡TCR1201+R1000型全站仪免棱镜测距参数表事实上免棱镜测距往往达不到标称的距离,主要原因是由于不同颜色的材质对无棱镜测距所反射信号的不同所产生的,如颜色越浅则反射越强。
在强光下或炽热气流下,也影响到测距距离。
在现场测量中发现,此型号全站仪对钢管桩定位测量能免棱镜测距的最远距离仅为400米左右。
如果放样距离超出这个范围,钢管桩放射回来的信号较弱,那么无法形成测量结果;所以要注意测站距离目标点不要超出最远测距距离。
二、免棱镜全站仪测量定位栈桥钢管桩的施工方法栈桥作为建设运输材料、设备、人员而修建的临时桥梁设施,是海上主桥施工物资供应及交通出入的主要通道,也是整座跨海大桥施工的基础性工程和控制性工程。
栈桥一般由桥墩、桥台、钢梁及桥面板等组成,上部结构主要由贝雷梁片结构及桥面板等组成,其下部结构基础桥墩一般采用钢管桩支承。
栈桥钢管桩施工主要有两种方法:⑴采用打桩船和浮吊配合作业的水上施工方法;⑵采用吊机与打桩锤配合作业,采用“钓鱼法”由岸边开始逐孔向前推进施工。
其中,用打桩船定位钢管桩相对容易、效率高,但成本较大。
全站仪参数
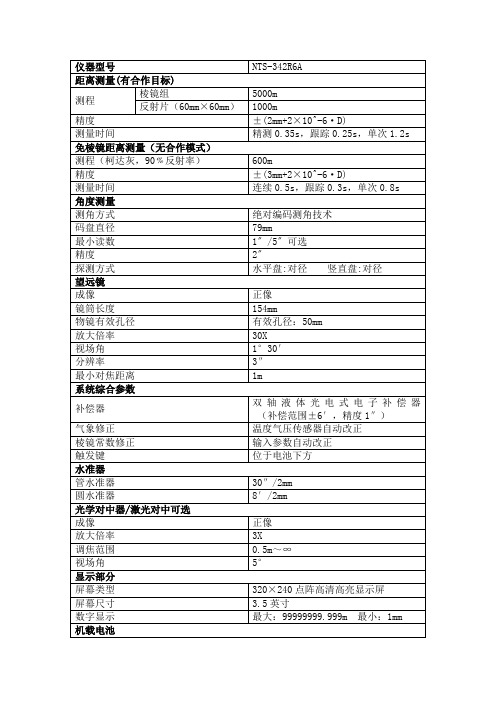
仪器型号NTS-342R6A 距离测量(有合作目标)
测程棱镜组5000m 反射片(60mm³60mm)1000m
精度±(2mm+2³10^-6²D)
测量时间精测0.35s,跟踪0.25s,单次1.2s 免棱镜距离测量(无合作模式)
测程(柯达灰,90﹪反射率)600m
精度±(3mm+2³10^-6²D)
测量时间连续0.5s,跟踪0.3s,单次0.8s 角度测量
测角方式绝对编码测角技术
码盘直径79mm
最小读数1〞/5〞可选
精度2〞
探测方式水平盘:对径竖直盘:对径
望远镜
成像正像
镜筒长度154mm
物镜有效孔径有效孔径:50mm
放大倍率30X
视场角1°30′
分辨率3″
最小对焦距离1m
系统综合参数
补偿器双轴液体光电式电子补偿器(补偿范围±6′,精度1″)
气象修正温度气压传感器自动改正
棱镜常数修正输入参数自动改正
触发键位于电池下方
水准器
管水准器30″/2mm
圆水准器8′/2mm
光学对中器/激光对中可选
成像正像
放大倍率3X
调焦范围0.5m~∞
视场角5°
显示部分
屏幕类型320³240点阵高清高亮显示屏
屏幕尺寸 3.5英寸
数字显示最大:99999999.999m 最小:1mm 机载电池
电源锂电池
电压直流7.2V
连续工作时间8小时
尺寸及重量
尺寸200mm³180mm³350mm 重量 6.0kg。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
机载电池
可充电锂电池
电池工作时间
8小时
屏幕显示
双面、中文显示
防水等级
IP55级
仪器配件
按常规控制测量标准配置
服务要求:
1、本地供应商或在本地有销售或服务网点的外地供应商均可参与。
2、供货商须提供设备17个月质保,终身维修的服务。
3、获得IS0质量认证体系或军标认技术参数
测量精度
有棱静:2+2ppm 免棱镜:5+3ppm
测量距离
单棱镜:5 Km免棱镜:300M
测量时间
测量1秒、跟踪测量0.5秒
测角原理
绝对编码盘测角,一块盘,采用CCD作为接收器。
测距电路性能
发光管功率:3mw ;电路放大倍数:1万倍;双马达二级减光;
测相方式
正弦波多点采样
自动补偿器
双轴光电式电子补偿器,补偿稳定时间:5秒
存储方式与存储量
内存:1万个点;SD卡:2G(至少1000万个点)
数据传输方式
SD卡和USB数据传输
测量程序
三维坐标测量和放样,对边测量,悬高测量,复测法角度测量,后方交会,偏心测量,道路设计程序,面积测量
气象修正
必须满足温度气压传感器自动修改
棱镜常数修正
4、合同签订后三个工作日完成交货、验收和培训工作。