工业机器人行业规范条件
工信部公布首批15家符合《工业机器人行业规范条件》的企业名单
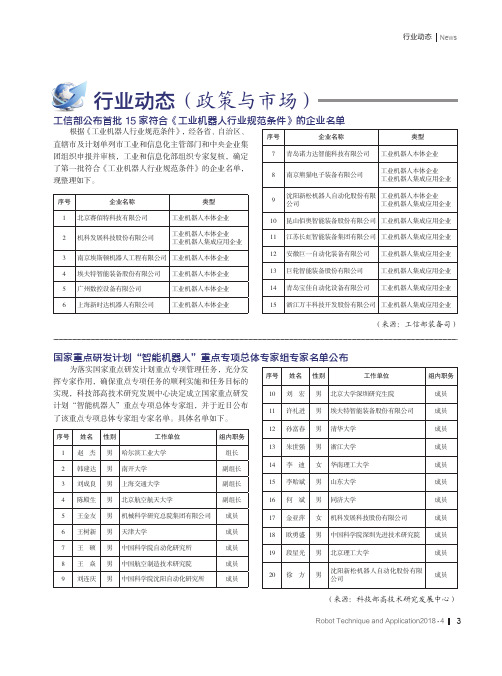
行业动态News3Robot Technique and Application20184行业动态(政策与市场)根据《工业机器人行业规范条件》,经各省、自治区、直辖市及计划单列市工业和信息化主管部门和中央企业集团组织申报并审核,工业和信息化部组织专家复核,确定了第一批符合《工业机器人行业规范条件》的企业名单,现整理如下。
工信部公布首批15家符合《工业机器人行业规范条件》的企业名单为落实国家重点研发计划重点专项管理任务,充分发挥专家作用,确保重点专项任务的顺利实施和任务目标的实现,科技部高技术研究发展中心决定成立国家重点研发计划“智能机器人”重点专项总体专家组,并于近日公布了该重点专项总体专家组专家名单。
具体名单如下。
国家重点研发计划“智能机器人”重点专项总体专家组专家名单公布序号企业名称类型1北京赛佰特科技有限公司工业机器人本体企业2机科发展科技股份有限公司工业机器人本体企业工业机器人集成应用企业3南京埃斯顿机器人工程有限公司工业机器人本体企业4埃夫特智能装备股份有限公司工业机器人本体企业5广州数控设备有限公司工业机器人本体企业6上海新时达机器人有限公司工业机器人本体企业序号企业名称类型7青岛诺力达智能科技有限公司工业机器人本体企业8南京熊猫电子装备有限公司工业机器人本体企业工业机器人集成应用企业9沈阳新松机器人自动化股份有限公司工业机器人本体企业工业机器人集成应用企业10昆山佰奥智能装备股份有限公司工业机器人集成应用企业11江苏长虹智能装备集团有限公司工业机器人集成应用企业12安徽巨一自动化装备有限公司工业机器人集成应用企业13巨轮智能装备股份有限公司工业机器人集成应用企业14青岛宝佳自动化设备有限公司工业机器人集成应用企业15浙江万丰科技开发股份有限公司工业机器人集成应用企业(来源:工信部装备司)(来源:科技部高技术研究发展中心)序号姓名性别工作单位组内职务1赵 杰男哈尔滨工业大学组长2韩建达男南开大学副组长3刘成良男上海交通大学副组长4陈殿生男北京航空航天大学副组长5王金友男机械科学研究总院集团有限公司成员6王树新男天津大学成员7王 硕男中国科学院自动化研究所成员8王 焱男中国航空制造技术研究院成员9刘连庆男中国科学院沈阳自动化研究所成员序号姓名性别工作单位组内职务10刘 宏男北京大学深圳研究生院成员11许礼进男埃夫特智能装备股份有限公司成员12孙富春男清华大学成员13朱世强男浙江大学成员14李 迪女华南理工大学成员15李贻斌男山东大学成员16何 斌男同济大学成员17金亚萍女机科发展科技股份有限公司成员18欧勇盛男中国科学院深圳先进技术研究院成员19段星光男北京理工大学成员20徐 方男沈阳新松机器人自动化股份有限公司成员。
机器人安全操作规范

机器人安全操作规范1.编制目的为规范各类机器人操作,防止在调试、操作工业机器人过程中发生意外事件,规避各类不安全因素,使操作者及周围人员处于安全的工作环境中,制定本指导书。
2.编制依据《工业环境用机器人安全要求第1部分:机器人》GB11291.1—2011《工业机器人安全实施规范》GB/T20867—20073.适用范围适用于各类机器人的使用、操作、调试、示教等人员及其相关的管理、操作人员。
4.管理规定4.1示教前安全规定(1)检查机器人的本体、控制柜等设备设施的完整程度,如发现任何异常请立即联系相关专业人员处理。
(2)示教人员应目检机器人系统和安全防护空间,确保不存在产生危险的外界条件。
示教盒的运动控制和急停控制应进行功能测试,以保证正常操作。
示教操作开始前,应排除故障和失效。
编程时,应关断机器人驱动器不需要的动力。
(3)示教人员进入工作区域前,所有的安全防护装置应确保在位,且在预期的示教方式下能起作用。
进入工作区域前,应要求示教人员进行编程操作,但应不能进行自动运行操作。
(4)将控制柜上的钥匙开关选择到本地,防止操作过程中外围信号的输入,引起机器人在操作者不知道的情况下进行误操作。
(5)确认急停键是否正常。
(6)在示教前,为安全起见,应该设立示教锁。
(7)在安全围栏内示教操作必须在机器人慢速并保证人员安全前提下才允许操作。
(8)所有相关操作需进行专业的培训并考核合格后才允许操作。
(9)为了防止示教者之外的其他人员误操作各按钮,示教人员应挂出警示牌以防止误启动。
(10)确认在安全围栏内没有任何其他人。
(11)机器人系统有异常或故障时,禁止带病作业,应将故障排除后再进行操作。
(12)确认安全保护装置能够正确运行。
(13)如出现任何异常情况,均应停止操作。
4.2示教安全规定(1)示教期间仅允许示教编程人员在防护空间内,其他人员禁止入内。
(2)示教时,操作者要确保自己有足够的空间后退,并且后退空间没有障碍物,禁止依靠示教。
工业和信息化部办公厅关于开展2024年工业机器人行业规范公告申报工作的通知

工业和信息化部办公厅关于开展2024年工业机器人行业规范公告申报工作的通知文章属性•【制定机关】工业和信息化部•【公布日期】2024.10.14•【文号】工信厅通装函〔2024〕379号•【施行日期】2024.10.14•【效力等级】部门规范性文件•【时效性】现行有效•【主题分类】通信业,装备工业正文工业和信息化部办公厅关于开展2024年工业机器人行业规范公告申报工作的通知工信厅通装函〔2024〕379号各省、自治区、直辖市及计划单列市、新疆生产建设兵团工业和信息化主管部门,有关中央企业:为贯彻落实《“十四五”机器人产业发展规划》,根据《工业机器人行业规范条件(2024版)》和《工业机器人行业规范条件管理实施办法(2024版)》(工业和信息化部公告2024年第20号)(以下分别简称《规范条件》《实施办法》)有关要求,现组织开展2024年工业机器人行业规范公告申报工作。
有关事项通知如下:一、各省、自治区、直辖市及计划单列市、新疆生产建设兵团工业和信息化主管部门(以下统称省级工业和信息化主管部门)、有关中央企业集团负责组织本地区(本集团)企业申报工作。
二、工业机器人相关企业自愿申请,如实填报《工业机器人行业规范企业申请报告》(附件1,以下简称《申请报告》),并提供相关证明材料。
申请材料报送至所在地省级工业和信息化主管部门或所属中央企业。
三、省级工业和信息化主管部门、中央企业严格按照《规范条件》《实施办法》要求,对企业申请材料进行初审,在《申请报告》中填写审核意见并加盖公章。
四、省级工业和信息化主管部门、中央企业将经初审符合《规范条件》的企业申请材料和推荐汇总表(附件2)(一式两份),于2024年11月15日前报送至工业和信息化部装备工业一司(北京市西城区西长安街13号),相关材料电子版(PDF)刻录光盘随纸质材料寄送。
附件:1.工业机器人行业规范企业申请报告2.工业机器人行业规范企业推荐汇总表工业和信息化部办公厅2024年10月14日(联系人及电话:李梦玮010-68205199雷蕾158****6922)。
智能工业机器人标准

智能工业机器人标准一、引言随着科技的快速发展,智能工业机器人广泛应用于制造业,极大地提高了生产效率和降低了生产成本。
为了规范智能工业机器人的研发、应用和维护,本文提出了以下标准。
二、机器人硬件标准1. 机器人本体:应符合结构紧凑、刚度大、承载能力强、运动精度高等要求,根据实际应用场景选择合适的类型和尺寸。
2. 传感器:包括视觉、触觉、力觉、距离等传感器,应具备高精度、高可靠性、抗干扰能力强等特点。
3. 驱动器:应选用性能稳定、易于控制的驱动器,确保机器人的运动性能和定位精度。
4. 控制器:应具备强大的运算能力和数据处理能力,能够实现复杂的运动控制和数据处理。
三、机器人软件标准1. 操作系统:应选用成熟的操作系统,如ROS(Robot Operating System)等,确保系统的稳定性和安全性。
2. 编程语言:推荐使用Python或C++等编程语言,实现机器人的运动控制和数据处理。
3. 软件架构:应采用模块化、层次化的软件架构,方便维护和升级。
4. 软件开发工具:应提供易用的软件开发工具,如IDE等,方便开发人员进行开发和调试。
四、机器人安全标准1. 防电击:机器人应具备防电击功能,确保操作人员安全。
2. 防碰撞:机器人应具备防碰撞功能,避免机器人与其他设备或人员发生碰撞。
3. 紧急停止:机器人应配备紧急停止按钮,能够在紧急情况下迅速停止机器人的运动。
4. 防护措施:机器人周围应设置防护栏、安全门等防护措施,确保操作人员和机器人安全。
五、机器人应用标准1. 应用领域:智能工业机器人应适用于汽车制造、电子设备制造、塑料制品制造等制造业领域。
2. 应用流程:应明确机器人的操作流程和注意事项,确保操作人员能够正确使用机器人。
3. 应用案例:应有典型的应用案例,以便其他企业或机构借鉴和参考。
六、机器人可靠性标准1. 环境适应性:智能工业机器人应能够在不同的环境条件下稳定运行,包括温度、湿度、气压等。
2. 耐久性:机器人应具备较长的使用寿命,确保长期稳定运行。
首批15家符合《工业机器人行业规范条件》企业名单公布

全 、航 运安 全 和生 态安 全 。
6月26 E1,《江苏 省超 低能 耗 被 动式 建 筑 技 术导
6 8 墙材革新与建筑节能 2018.7
信 息博 采
0
lnform ation Collection
国家机器人创新中心启动
广东实施固废污染防治三年行动计划
6月19日,国家 机 器人创 新 中心启动 会在 沈 阳举
广 东省环境保 护厅 Et前 印发 《固体废 物 污染
行 。该 中心 由中科 院沈 阳 自动化 研 究 所 和 哈尔 滨 工 防治 三 年 行 动 计 划 (2018—2020年 )》,提 出 ̄1J2020
装 备股份有限公司、广州数控设备有限公司、上海 征因地制宜 选用好 氧发 酵 、工业 制砖 、水 泥窑协 同焚
新 时达 机 器人 有 限公 司 、青 岛诺 力达 智 能 科 技 有 限 烧 、热电厂及热 力厂掺烧 等方式进 行资源化处理 。 公司 、南京熊猫 电子装备有限公司、沈 阳新松机 器
人 自动化股份有限公司、昆山佰奥智能装备股份有 行业标准《建筑垃圾再生砂粉》征求意见
限公 司、江苏长虹智能装备集团有 限公司、安徽巨
近 日,中国建筑材料联合会标准质量部公示了
一 自动化装备有 限公司、巨轮智能装备股份有限公 《建筑垃圾再 生砂粉》(2016—1372T-JC)征求意见
司、青岛宝佳 自动化设备有 限公司 、浙江万丰科 技 稿 。该 标 准 由建筑 材 料工业技 术情 报研 究 所 等 单位
开发股 份有 限公 司。
负责起 草 。征 求意见 截 至 2018年8月1 1日。
水利部启动全国河湖采砂专项整治
建卫陶绿色工厂评价导则征求意见
工业机器人 性能试验应用规范-最新国标

工业机器人 性能试验应用规范1 范围本文件提供了制造商和用户等使用GB/T 12642-2013时,对工业机器人进行性能试验时的实施细则和操作步骤。
本文件供工业机器人制造厂商、试验部门、机器人用户使用。
2 规范性引用文件下列文件中的内容通过文中的规范性引用而构成本文件必不可少的条款。
其中,注日期的引用文件,仅该日期对应的版本适用于本文件;不注日期的引用文件,其最新版本(包括所有的修改单)适用于本文件。
GB/T 12642-2013 工业机器人性能规范及其试验方法3GB/T 12643GB/T 12643-2013 机器人与机器人装备词汇术语和定义界定的以及下列术语和定义适用于本文件。
静态柔顺性static compliance作用于机械机接口的每单位负载下机械接口的最大位移量。
最小定位时间 minimum posing time机械接口或移动平台从静止状态开始,运行一预定距离,到达静止状态所经历的最少时间(包括稳定时间)。
4 一般要求制造商、用户和独立的试验部门均可按本文件所述的试验项目对某个机器人或样机进行研究和检验,但定型试验和验收试验应在经过批准的有认证资质的实验室或制造商、用户以外的具有符合标准要求的试验设备的实验室进行。
应用规范对GB/T 12642的规定做了进一步陈述和解释,以便于操作。
5 试验前的准备工作为保证试验的顺利进行,制造商和试验部门在试验前应做好以下准备。
制造商的准备工作制造商在试验前应做好以下准备:a)制造商进行全部功能检查,并检查机器人控制器中的所有可设置参数。
在试验过程中,如果不得不重新调整机器人或设置参数,需重新开始试验。
b)制造商应通过压板或紧固件稳固地安装于试验环境,避免试验过程中机器人高速运动时因基础不稳造成的振动对性能指标的影响。
c)选定需要测量的性能指标。
针对被试机器人的应用场合,可按GB/T 12642-2013附录B选择所要测量的性能指标。
d)按GB/T 12642 -2013的6.3的要求,规定试验的环境条件和正常操作条件。
工业机器人、机械手国家标准

标准号标准名称标准分类GB 11291.2-2013机器人与机器人装备工业机器人的安全要求第2部分:机器人系统与集成强制性国家标准GB 11291.1-2011工业环境用机器人安全要求第1部分:机器人强制性国家标准GB/T 33262-2016工业机器人模块化设计规范推荐性国家标准GB/T 33265-2016教育机器人安全要求推荐性国家标准GB/T 33264-2016面向多核处理器的机器人实时操作系统应用框架推荐性国家标准GB/T 33266-2016模块化机器人高速通用通信总线性能推荐性国家标准GB/T 33267-2016机器人仿真开发环境接口推荐性国家标准GB/T 32197-2015机器人控制器开放式通信接口规范推荐性国家标准GB/T 29824-2013工业机器人用户编程指令推荐性国家标准GB/T 29825-2013机器人通信总线协议推荐性国家标准GB/T 20867-2007工业机器人安全实施规范推荐性国家标准GB/T 20868-2007工业机器人性能试验实施规范推荐性国家标准GB/T 12642-2013工业机器人性能规范及其试验方法推荐性国家标准GB/T 12643-2013机器人与机器人装备词汇推荐性国家标准GB/T 12644-2001工业机器人特性表示推荐性国家标准GB/T 14468.1-2006工业机器人机械接口第1部分:板类推荐性国家标准GB/T 14468.2-2006工业机器人机械接口第2部分:轴类推荐性国家标准GB/T 16977-2005工业机器人坐标系和运动命名原则推荐性国家标准GB/T 17887-1999工业机器人末端执行器自动更换系统词汇和特性表示推荐性国家标准GB/T 19400-2003工业机器人抓握型夹持器物体搬运词汇和特性表示推荐性国家标准GB/T 19659.1-2005工业自动化系统与集成开放系统应用集成框架第1部分:通用的参考描述推荐性国家标准GB/T 19659.2-2006工业自动化系统与集成开放系统应用集成框架第2部分:基于ISO 11898的控制系统的参考描述推荐性国家标准GB/T 19659.3-2006工业自动化系统与集成开放系统应用集成框架第3部分:基于IEC 61158控制系统的参考描述推荐性国家标准GB/T 19659.4-2006工业自动化系统与集成开放系统应用集成框架第4部分:基于以太网控制系统的参考描述推荐性国家标准GB/T 33263-2016机器人软件功能组件设计规范推荐性国家标准GB/T 34667-2017电动平衡车通用技术条件推荐性国家标准GB/T 34668-2017电动平衡车安全要求及测试方法推荐性国家标准GB/T 26153.3-2015离线编程式机器人柔性加工系统第3部分:喷涂系统推荐性国家标准GB/T 18220-2012信息技术手持式信息处理设备通用规范推荐性国家标准GB/T 26799-2011点胶机通用技术条件推荐性国家标准GB/T 26153.1-2010离线编程式机器人柔性加工系统第1部分:通用要求推荐性国家标准GB/T 26153.2-2010离线编程式机器人柔性加工系统第2部分:砂带磨削加工系统推荐性国家标准GB/T 26154-2010装配机器人通用技术条件推荐性国家标准GB/T 14283-2008点焊机器人通用技术条件推荐性国家标准GB/T 35144-2017机器人机构的模块化功能构件规范推荐性国家标准GB/T 36008-2018机器人与机器人装备协作机器人推荐性国家标准GB/T 36007-2018锄草机器人通用技术条件推荐性国家标准GB/T 36013-2018锄草机器人安全要求推荐性国家标准GB/T 36012-2018锄草机器人性能规范及其试验方法推荐性国家标准GB/T 36530-2018机器人与机器人装备个人助理机器人的安全要求推荐性国家标准。
工业机器人安全规范(国家标准)

4 总则
4 基本要求 门 机器人的运行特性与其他设备不同 机器人以高能运动掠过比其机座大的空间, 机器人手臂的运动 形式和启动很难预料, 且可能随生产和环境条件而改变。 在机器人驱动器通电情况下, 维修及编程人员有时需要进入其限定空间。 且机器人限定空间之间或
3 定义
本标准除采用G / 163 97 B T 4-19 中已定义的术语外, 2 还采用下列定义。
31 使 置 e bn d i . 能装 n lg c ai e e v
一 , 种手动操作装置 仅当其保持在预定位置时才允许机器人运动。 32 防护装置 gad , ur 通过物理遮挡方式专用于提供防护的机械部件, 按其结构可称为防护罩、 防护屏、 壳、 栅栏、 封闭 门、 式防护装置、 隔栏等。
组织、 政府和民间团体可与 I S O联系, 也可参加该项工作。有关电气标准化的各项工作, O与国际电 I S 工委员会( C 紧密合作。 I ) E 技术委员会采纳的国际标准草案由 全体成员体投票表决, 要求至少 7%的成员体表决赞成方能作 5 为国际标准发布。 国际标准I 01 由I T 1 ( S 128 S /C 4工业自 O O 8 动化系统和集成) 的分委会S 2制造环境用的机器 C(
一 对于考虑到的( 包括估计需要出、 入或接近危险区) 应用, 确定所要求的任务; - 识别( 包括与每项任务有关的故障和失效方式等) 一 危险源( .. 见421; )
一评价风险( 22; ..) 见4 - 考虑把风险降低到可接受程度的安全对策( ..) 一 见423; 一 选择与所要求的任务及可接受的危险程度相一致的安全防护措施( . 4 75; 见737 和 .) , . -一 达到的整体安全水平, 评价已 并保证可接受( .. 见423 )
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
工业机器人行业规范条件
工业机器人行业属于高技术领域,它的发展对于制造业的现代化起
着重要的推动作用。
为了确保工业机器人的安全性、性能和可靠性,
规范条件的制定变得尤为重要。
本文将从安全规范、性能规范和可靠
性规范三个方面来探讨工业机器人行业的规范条件。
一、安全规范
安全是工业机器人应遵循的首要规范条件。
在使用工业机器人的过
程中,必须严格遵守以下安全规范:
1. 作业人员安全:操作人员应接受相关培训,熟悉机器人的操作原
理和安全规范,避免操作失误,确保人员的安全。
2. 设备安全:机器人应具备防护罩、传感器和急停装置等安全设备,以减少事故发生的可能性。
3. 人机协同安全:工业机器人应具备人机协同能力,能够与作业人
员实现安全合作,避免意外伤害的发生。
4. 环境安全:机器人应适应各种工作环境,并能在恶劣的工况中正
常运行,确保机器人及周围环境的安全。
二、性能规范
工业机器人的性能规范是其能够满足工业生产需求的基本要求。
以
下是工业机器人的性能规范:
1. 动作精度:工业机器人应具备较高的动作精度和重复定位精度,
以保证生产过程的准确性和稳定性。
2. 运动速度:工业机器人应具备较高的运动速度,以提高生产效率
和响应速度。
3. 负载能力:机器人应具备足够的负载能力,能够承担各种工件以
及工序中的重量。
4. 灵活性和多功能性:工业机器人应具备较高的自由度和灵活性,
能够适应不同的生产需求和加工工艺。
三、可靠性规范
工业机器人的可靠性规范是其能够长期稳定工作的重要保证。
以下
是工业机器人的可靠性规范:
1. 寿命要求:工业机器人应具备较长的使用寿命,能够在长时间运
行下保持良好的性能。
2. 故障率:机器人的故障率应尽可能低,能够确保生产过程的连续
性和稳定性。
3. 维护要求:简化机器人的维护过程,减少维护所需的时间和成本,提高机器人的可靠性和可维护性。
4. 耐久性:机器人应具备良好的耐久性,能够在各种恶劣的工作条
件下正常运行。
结论
工业机器人行业的规范条件包括安全规范、性能规范和可靠性规范。
遵守这些规范条件对于确保工业机器人的安全、性能和可靠性至关重要。
通过规范条件的制定,工业机器人行业将能够持续稳定地发展,
为制造业的升级和现代化做出更大的贡献。