最优二次型控制器参考文献
《最优控制》第4章线性系统二次型性能指标的最优控制问题

1 T 1 T e ( t ) Q ( t ) e ( t ) X (t )Q(t ) x(t ) 以零状态为平衡状态 2 2 1 T 1 T ②输出调节器 e (t )Q(t )e(t ) y (t )Q(t ) y (t ) 2 2
<输出调节器可转化为状态调节器> y(t ) c(t ) x(t )
第4章——线性系统二次型性能指标的最优控制问题
(t ) (22 F12 )1( F11 21) x(t )
可以证明 (22 F12 )1 存在 因此, (t )与X (t ) 呈线性关系,可表示为 (t ) P(t ) x(t ) 则
u * (t ) R 1(t ) BT (t ) P(t ) x(t )
(微分方程解的存在性和唯一性定理)
* * * * x1 x2 即x1 x2
16
第4章——线性系统二次型性能指标的最优控制问题
5.总结 状态调节器控制规律 u * (t ) R 1 (t ) BT (t ) P(t ) x(t ) 其中P(t)满足下面的矩阵黎卡提微分方程及边界条件
⑤状态方程
x Qx AT
1 T 1 T x x Ax BR B A BR B x T T Qx A Q A
x(t0 ) x(t ) (t ) (t , t0 ) (t ) 0
3 Q(t ), R(t ) 加权矩阵 Q(t )半正定,R(t )正定且均为时变 1 T 4 e (t f ) Fe(t f ) 突出对终端的误差的要求 2 特别要求终端固定,即e(t f ) 0时,F
5
二次型最优控制问题中的权矩阵与最优控制律
为 u* = - Kx = - B- 1 Px, 其中 P 是如下 R iccat i 方程
的唯一对称正定解:
PA + AT P - PBB T P + Q = 0.
记系统的能控性指数集为{ v1
vm } , 根据
该能控性指数集, 将 P 矩阵按列记为
P = [ p11
p1v1 |
则有如下结论:
| pm1
1引 言
二次型最优问题的权矩阵选择始终是人们研究 的热点问题. 虽然研究的角度和方法不同, 但这些研 究都提出一个用来约束权矩阵的指标函数, 将问题 相应转化为求二次型最优控制律, 使得该约束权矩 阵的指标函数 达到极值[ 1 5] . 二次型最 优的逆问 题 是: 给定系统的一组期望闭环极点, 求解二次型最优 的权矩阵及相应的最优反馈控制律, 使得系统闭环 极点配置在期望的闭环极点上[ 6, 7] .
若权矩阵不为零的两个对角线元素不是相邻 的, 设非零的两对角线元素为 qll 和 qkk , 则取
第 8期
王进华: 二次型最优控制问题中的权矩阵与最优控制律
945
P = P-
0ll 0
. 0
0kk
因 P > 0, 则存在足够小的 , 使得 P > 0. 此时有 Q= Q+
0ll 0 02 0
02
. 20 02 0
控制与决策
Contr ol and Deci sion
2007 年 8 月
Aug . 2007
文章编号: 1001 0920( 2007) 08 0943 03
二次型最优控制问题中的权矩阵与最优控制律
王进华
( 福州大学 电气工程与自 动化学院, 福州 350008)
基于线性二次型及内部稳定的最优线性控制

2 — 2
4l 一 1 A2 G + 1=0
从 两 方 ,以 个 入 新 G 表 这 个 程可 霜 两 引 的 变 T 的 达 得 到 量 、
维普资讯
学 术 论 坛
SIC &TCNL YNOMT: CNE EH 0 FRAI E O 0 IQ O : N
基于线性二次型及内部稳定的最优线性控制
安伟国 ( 南京航 空航天大学 2 0 1 ) 1 0 6
摘 要:线性_次型内部稳定最优线性控制是_种内部稳定与最优二次型控制相结合的控制算法,该方法考虑了可能引起系统不稳 - 定的 外部信号 ,主要是 系统参考输入及干扰信号 ,并将其建立为 系统状态 ,排除不可镇 定部分 对系统的影响 ,产生了一个确保系统
式。
磁悬浮系统线性二次型最优控制的研究
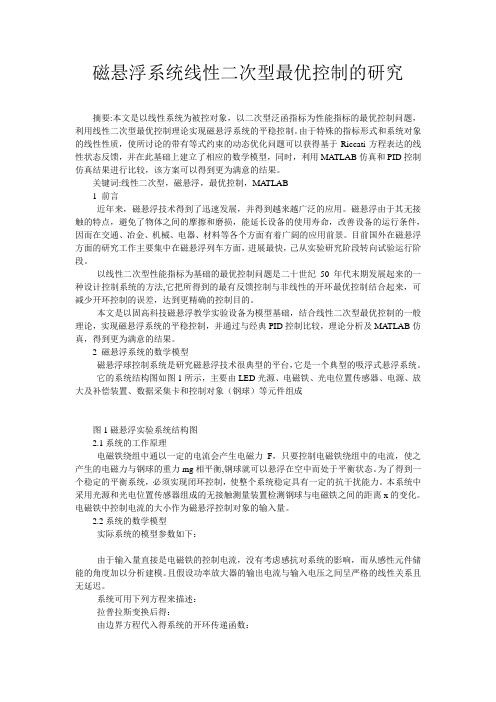
磁悬浮系统线性二次型最优控制的研究摘要:本文是以线性系统为被控对象,以二次型泛函指标为性能指标的最优控制问题,利用线性二次型最优控制理论实现磁悬浮系统的平稳控制。
由于特殊的指标形式和系统对象的线性性质,使所讨论的带有等式约束的动态优化问题可以获得基于Riccati方程表达的线性状态反馈,并在此基础上建立了相应的数学模型,同时,利用MATLAB仿真和PID控制仿真结果进行比较,该方案可以得到更为满意的结果。
关键词:线性二次型,磁悬浮,最优控制,MA TLAB1 前言近年来,磁悬浮技术得到了迅速发展,并得到越来越广泛的应用。
磁悬浮由于其无接触的特点,避免了物体之间的摩擦和磨损,能延长设备的使用寿命,改善设备的运行条件,因而在交通、冶金、机械、电器、材料等各个方面有着广阔的应用前景。
目前国外在磁悬浮方面的研究工作主要集中在磁悬浮列车方面,进展最快,己从实验研究阶段转向试验运行阶段。
以线性二次型性能指标为基础的最优控制问题是二十世纪50年代末期发展起来的一种设计控制系统的方法,它把所得到的最有反馈控制与非线性的开环最优控制结合起来,可减少开环控制的误差,达到更精确的控制目的。
本文是以固高科技磁悬浮教学实验设备为模型基础,结合线性二次型最优控制的一般理论,实现磁悬浮系统的平稳控制,并通过与经典PID控制比较,理论分析及MA TLAB仿真,得到更为满意的结果。
2 磁悬浮系统的数学模型磁悬浮球控制系统是研究磁悬浮技术很典型的平台,它是一个典型的吸浮式悬浮系统。
它的系统结构图如图1所示,主要由LED光源、电磁铁、光电位置传感器、电源、放大及补偿装置、数据采集卡和控制对象(钢球)等元件组成图1磁悬浮实验系统结构图2.1系统的工作原理电磁铁绕组中通以一定的电流会产生电磁力F,只要控制电磁铁绕组中的电流,使之产生的电磁力与钢球的重力mg相平衡,钢球就可以悬浮在空中而处于平衡状态。
为了得到一个稳定的平衡系统,必须实现闭环控制,使整个系统稳定具有一定的抗干扰能力。
线性二次型最优控制器的设计
99
线性二次型最优控制器的设计
u
B
﹢ ∑ x ﹢
.
∫
A
x
C ﹢ ∑ ﹣∧ C
y
B
﹢ ∑ x ﹢﹢
. ∧
∫
A G
x
∧
y
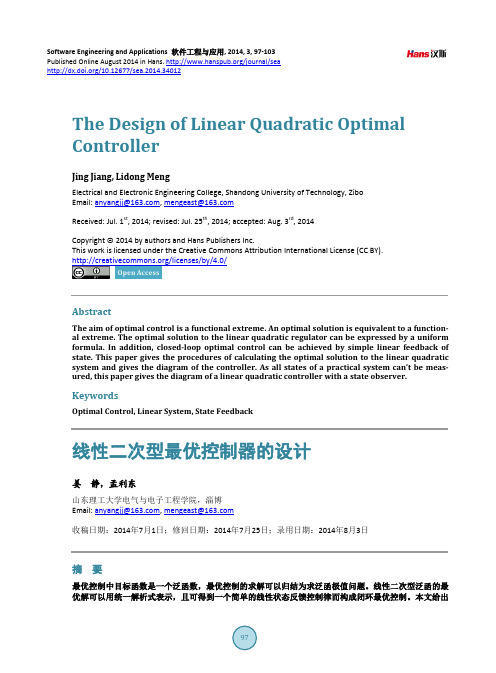
Figure 2. Reconstruction of state x ( t ) 图 2. 状态 x ( t ) 的重构示意图
u u u
系统
y
控制器
x
∧
u
观测器
y
Figure 3. An optimal controller with a state observer 图 3. 带有观测器的最优控制器
根据以上步骤,得出线性二次型最优控制器结构图如图 1 所示。 线性二次型最优控制器的特点如下所示: 1) 最优控制式 u ∗ ( t ) 是线性状态反馈控制律,便于实现闭环最优控制;
2) 黎卡提方程是非线性矩阵微分方程,通常只能采用计算机逆时间方向求数值解。由于黎卡提方程 与状态及控制变量无关,因而在定常系统情况下可以离线算出 P ( t ) ; 3) 只要时间区间 黎卡提矩阵微分方程的解 P ( t ) 就是时变的, 最优反馈系统将成为 t0 , t f 是有限的, 线性时变系统,即使对于线性定常系统,加权阵为常阵,求出的 P ( t ) 也是时变的。
关键词
最优控制,线性系统,状态反馈
1. 引言
线性二次型最优控制问题属于线性系统综合理论中简单而又应用广泛的一类优化型综合问题,是现 代控制理论中的最重要的成果之一。优化型综合问题的特点是通过使全面表征系统性能好坏程度的性能 指标函数取极大或极小值来确定系统的控制规律。如果系统是线性的,性能指标是状态变量和控制变量 的二次型函数的积分,则这样的最优控制问题称为二次型最优控制问题。二次型性能指标具有明显物理 意义,代表了大量工程实际问题中提出的性能指标要求。 线性二次型调节器(Linear Quadratic Regulator, LQR)的最优解可以用统一的解析式表示,且可得到一 个简单的线性状态反馈控制律而构成闭环最优控制,这对最优控制在工程应用中的实现具有十分重要的 意义。同时,线性二次型问题还可以兼顾系统性能指标如快速性、准确性、稳定性和灵敏度等多方面因 素。线性二次型问题是最优控制问题中简单而且应用广泛的一类优化问题。线性二次型最优控制器的实 现是先计算出使性能指标泛函取极小值的输入量 u ∗ ( t ) , 而 u ∗ ( t ) 的作用是通过状态的线性反馈来实现的, 即通过确定状态的最优反馈系数来实现最优控制。在 20 世纪 60 年代之前,控制系统的设计风格为:手 算,利用作图,反复试凑;而在 20 世纪 60 年代之后,控制系统的设计风格为:提出目标函数,采用优 化方法,使用数字计算机,重视算法。LQR 控制器的研究具有普遍意义,易于获得解析解,最为可贵的 是能获得线性反馈的结构[1] [2]。 LQR 控制即线性二次型调节器,其对象是现代控制理论中以状态空间形式给出的线性系统,而目标函
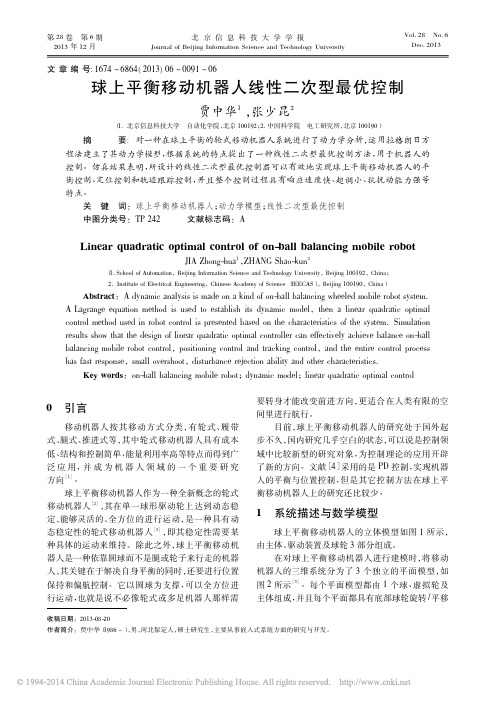
球上平衡移动机器人线性二次型最优控制_贾中华
Q = 「φ x, θ x ? , X =[ 其中, φx , θx , φ, θ]
· φ x · · θx Q = = ¨ ¨ φ Q x ¨ θ x
T
·
· x x
T
将式( 18 ) 写成状态空间的形式, 可得:
[ ]
式中
[M
Q
-1 x
·
( F NP - ( C x + G x ) )
}
( 2)
+
( 6) ( 7) ( 8) ( 9) ( 10 ) ( 11 )
r B 为球轮的半径; r W 为全向轮的半径; l 为主 式中, yW 、 y C 分别为球轮、 体重心高度; y B 、 虚拟驱动轮、 主 体在 y 轴方向移动的位移; θ x 、 φx 、 x 分别为 yz 平面 上主体的旋转角度、 球轮的旋转角度以及虚拟驱动 轮的旋转角度。 由于球与虚拟驱动轮接触点处的速度相等, 即 B 点与 C 点的速度相等, 可得到虚拟驱动轮的旋转 角度与极小坐标系的关系为
[5 ]
作者简介: 贾中华( 1986 - ) , 男, 河北保定人, 硕士研究生, 主要从事嵌入式系统方面的研究与开发。
92
北京信息科技大学学报
第 28 卷
图1
球上平衡移动机器人立体模型
图3
机器人 yz 平面模型
rB · · · ( φ - θx ) - θx rW x rB · · · · = ( - ) - y φy θy θy rW r · · · B z = sin α( φ z - θ z ) rW x =
( 14 ) ( 15 ) ( 16 ) ( 17 )
Cx = Gx =
基于MATLAB的线性二次型最优控制算法及应用研究
基于MATLAB的线性二次型最优控制算法及应用研究摘要早在上世纪50年代,世界上就出现了对于线性二次型最优控制LQ(Linear Quadratic)的研究。
随着对LQ的不断深入研究,如今它已经成为了现代控制理论中最经典的最优控制之一。
在各种关于对LQ的研究中,基于状态反馈控制器的研究是最为系统且完整的。
而直线一级倒立摆系统作为研究控制理论的一种实验平台,它不但结构简单,价格低廉,而且可以反映出控制中的许多典型问题,从而使它在很多领域都得到了应用。
MATLAB作为数字仿真领域中所使用的系统软件的代表,且又具有功能强大的函数库,能使研究者们便捷地实现现代控制理论的目标。
本文针对一阶线性系统,以状态变量x和控制输入变量u构成的二次型函数为目标函数,研究了线性二次型最优控制算法中的三个主要研究方向,具体为状态调节器问题、输出调节器问题以及跟踪器问题,并分别给出数值算例进行了MATLAB仿真。
最后以直线一级倒立摆系统作为具体的例子,研究了如何利用线性二次型最优控制实现倒立摆控制器设计,并给出系统模型及MATLAB仿真波形。
该论文有图14幅,表2个,参考文献32篇。
关键词:线性二次型最优控制状态调节器输出调节器跟踪器MATLAB 倒立摆系统The Algorithm and Application Research of Linear Quadratic Optimal Control based on MATLABAbstractIn early 1950, there appeared for the research of the linear quadratic optimal control LQ (Linear Quadratic) , with the deepening study of LQ, LQ has now become one of the most classical optimal control of the modern control theory. In many of research on LQ, one of them which based on state feedback controller is the most systematic and complete. And the linear inverted pendulum system as an experimental platform which research the control theory, it not only has the advantages of simple structure, low price, but also can reflect many typical control problem, so it has been applied in many fields.MATLAB, as the representative of the system software used in the field of digital simulation, and has a powerful function library, so it can make the researchers easily achieve the goals of modern control theory.In this paper, for the first-order linear system, the quadratic function formed by the state variable x and the control input variable U is the objective function,and studies three major issues in the linear quadratic optimal control algorithm,which are the state regulator problem, the output regulator problem and tracker problem, and gives the specific numerical examples and simulates these problems by MATLAB. Then this paper studies the application of linear quadratic optimal control in the inverted pendulum controller design, gives system model and the MATLAB simulation waveform.Key Words:Linear quadratic optimal control state regulator output regulator tracker MATLAB inverted pendulum system目录摘要 (I)Abstract ........................................................................................................................ I I 目录 . (III)图清单 (V)表清单 (V)1 绪论 (1)1.1 课题的研究背景及意义 (1)1.2 课题的研究现状 (2)1.3 本文研究工作与内容安排 (3)2 MATLAB基础 (4)2.1 简述 (4)2.2 MATLAB基本功能及特点 (4)2.3 M文件的使用 (5)2.4 本章小结 (7)3 线性二次型理论研究及MATLAB仿真 (8)3.1 线性二次型基本理论 (8)3.2 状态调节器问题研究 (9)3.3 输出调节器问题研究 (14)3.4 跟踪器问题研究 (17)3.5 本章小结 (22)4 线性二次型最优控制在倒立摆系统中的实现 (23)4.1 问题简述 (23)4.2 倒立摆系统的数学模型 (23)4.3 二次型最优控制器 (25)4.4 Simulink仿真 (27)4.5 本章小结 (31)5 总结与展望 (32)参考文献 (33)致谢 (35)附录 (36)图清单表清单1 绪论早在1950年,就有人开始对于线性二次型最优控制LQ 进行研究,到了现在LQ 的研究理论不断成熟,已经成为现代控制理论中最经典的最优控制之一。
基于二次型最优调节器的倒立摆系统

Computer Knowledge and Technology电脑知识与技术人工智能及识别技术本栏目责任编辑:唐一东第6卷第24期(2010年8月)基于二次型最优调节器的倒立摆系统于铁利1,于涛2(1.辽宁工业大学电气工程学院锦州121000;2.北京邮电大学自动化学院,北京100876)摘要:该文根据一级直线型倒立摆的系统组成及其工作原理,建立了其状态空间方程。
基于该状态空间模型,利用MATLAB求解、设计了一级倒立摆系统的二次型最佳调节器。
仿真结果表明了该二次型最佳调节器的有效性。
关键词:倒立摆;二次型最优调节器;状态空间中图分类号:TP18文献标识码:A文章编号:1009-3044(2010)24-6847-03Inverted Pendulum Systems Based on the Quadratic Optimal RegulatorYU Tie-li1,YU Tao2(1.College of Electrical Engineering,Liaoning University of Technology,Jinzhou121000,China;2.School of Automation,Beijing Univer-sity of Posts and Telecommunications,Beijing100876,China)Abstract:In this paper,the state space equations of a single linear inverted pendulum system are built according to its constitution and working principle.Based on this state space model MATLAB is used in solving and designing the linear quadratic optimal regulator of this system.The simulation results show that the regulator for this inverted pendulum system is effective.Key words:inverted pendulum systems;linear quadratic optimal regulator;state space倒立摆系统是一种绝对不稳定、高阶次、多变量、强耦合的非线性系统,是控制理论研究中理想的实验对象,它为控制理论的教学、实验和科研构建了一个良好的实验平台,促进了控制新理论和新思想的发展。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
参考文献
[1]金龙国,王娟.线性二次型最优控制器的MATLAB实现[J].青岛人学学报,2004,(01).
[2]张锋.线性二次型最优控制问题的研究[D].天津:天津大学电气与自动化学院硕士学位论文,2009.5.
[3]卢伯英,于海勋,译.现代控制工程(第四版)[M].北京:电子工业出版社,2003.
[4]刘豹,唐万生.现代控制理论[M].北京:机械工业出版社,2008:293-303.
[5]段光仁.鲁棒输出反馈控制系统设计[J].自动化学报,1992,18(6):742-747.
[6]薛定宇.反馈控制系统设计与分析——MA TLAB语言应用[M].北京:清华大学出版社,2000.
[7]周雪琴,张洪才,等.控制工程导论[M].西安:西北工业大学出版社,1995.
[8]刘金琨.先进PID控制机器MATLAB仿真[M].北京:电子工业出版社,2003.1.
[9]刘红军.电流变技术在结构振动控制中的应用[D].西安:西北工业大学,1999.
[10]张阿舟,姚起航,等.振动控制工程[M].北京:航空工业出版社,1989.
[11]李新飞,朱齐丹.基于极点配置的二级倒立摆最优控制器设计[J].控制工程,2005,12(增刊):74-77.
[12]段广仁.线性系统理论(第2版)[M].沈阳:哈尔滨工业大学出版社,2004.
[13]王晓燕,冯江.自动控制理论实验与仿真[M].广州:华南理工大学出版社,2006:161-162.
[14]张志涌.精通MATLAB5.3版[M].北京:北京航空航天大学出版社,2000.
[15]马树萍,程兆林.奇异系统的不确定号二次型指标最优控制问题[J].自动化
学报,2006,32(6):271-278.。