传感器课程设计列车测速测距系统
基于多传感器数据融合的列车距离和速度估计
基于多传感器数据融合的列车距离和速度估计摘要列车和单节车厢的准确距离和速度估计是高速列车系统平安运行的必要条件。
通常,列车系统的距离和速度测量不依赖于单个传感器,因为传感器易受各种运行条件的影响,如雪、雨、雾、隧道、丘陵地区、滑动、滑动等。
因此,来自传感器组合的信息在一定的操作条件下可以进行补充,而且需要相互进行正确的估计。
对于距离测量,通常使用全球导航卫星系统(GNSS)和应答器。
速度传感采用车轮传感器、雷达和GNSS相结合的方式。
传感器具有采样率和噪声特性等方面的多样性。
如果直接使用测量值,将大大影响整体估计的准确性和可靠性。
因此,本文提出了一种基于非线性纵向列车动力学模型的概率加权融合算法。
融合算法结合了分布式和经过扩展的传感器专用的卡尔曼滤波器的状态估计。
该融合算法在模拟传感器测量、大范围噪声、杂散测量、列车运行状况和轨道环境干扰等方面的有效性得到了验证。
1介绍随着快速机动的开展,高速列车在一段时间内成为人们的根本需求。
在这种情况下,列车运行防护系统(ATP)是必要的,其保障在列车运行异常情况下安全地紧急制动,并使列车沿着期望的轨道行驶。
及时准确的信息使ATP系统能够监控和管理高速列车系统的平安和效率最大化的运行。
为满足平安目标,ATP要求距离测量精度为±5m[l]。
当运行速度小于30km/h时,要求速度测量精度为±2km/h,当行驶速度大于500km/h时,速度测量精度线性增加至±12km/h[l]。
此外,ATP系统必须知道最后一辆车和其他车辆的位置,以便在列车上合理应用制动信号。
另外,单个传感器可能无法在不同的列车运行条件下提供测量,如雪、雨、雾、隧道、丘陵地区、滑动、滑动等。
因此,需要一个以上的传感器来全面、持续地监测轨道车辆的距离和速度。
为了满足这一需求,多年来已经使用了几种传感器来测量列车距离和速度。
这些传感器的测量精度很低,通常会受到随机噪声、随机游动噪声、闪烁噪声等多种噪声的影响。
课程设计霍尔传感器测量车速系统设计

霍尔传感器测量车速系统设计摘要本文介绍了霍尔传感器测速的原理,设计了基于单片机AT89C51的测量车速系统。
完成了车速测量系统的硬件电路设计、霍尔传感器测量电路的设计、显示电路的设计。
测量转速的霍尔传感器和车轴同轴连接,车轴每转一周,产生一定量的脉冲个数,由霍尔器件电路部分输出幅度为12V的脉冲。
经光电隔离器后成为输出幅度为5V转数计数器的计数脉冲。
控制定时器计数时间,即可实现对车速的测量。
在显示电路设计中,通过1602实现在LCD上直观地显示车轮的转速值。
与软件配合,实现了显示、报警功能。
关键词:车速测量;霍尔传感器;单片机;89C51;LCDAbstractThis paper introduces the principle of the hall sensors, speed, the design based on single chip microcomputer AT89C51 measurement speed system. Completed the speed of the measurement system hardware circuit design, hall sensor measurement circuit design, display circuit design. Measurement speed hall-effect sensor and axle coaxial connected, every turn a week axle, produce a certain amount of the number of the pulse, the hall device circuit of the output amplitude for 12 V of the pulse. By photoelectric isolated after the output amplitude for 5 V become number of turn counter pulse count. Control the timer counting time, to speed measurement can be realized. The display circuit design, through the 1602 to realize in LCD display directly on the wheel speed value. And with the software to display and alarm function. Key Words: Speed Measurement; Hall Sensor; Microcomputer; 89C51;LCD目录一、内容及要求.............................................. 错误!未定义书签。
最新光电传感器课程设计汽车测速系统精品版
2020年光电传感器课程设计汽车测速系统精品版光电信息技术研究性教学报告题目:汽车测速系统目录No table of contents entries found.一、摘要社会时代的快速发展,汽车在人们日常生活中越来越重要,随着汽车的日益普及,由于碰撞而引起的事故也越来越多,其中倒车碰撞、超速碰撞占碰撞事故的大部分。
为了尽量防止超速等问题、提高安全性。
本文设计了一种测速器系统,方便司机根据车速安全行车。
转速测量方法转速是指作圆周运动的物体在单位时间内所转过的圈数 ,其大小及变化往往意味着机器设备运转的正常与否 ,因此 ,转速测量一直是工业领域的一个重要问题。
按照不同的理论方法 ,先后产生过模拟测速法 (如离心式转速表 )、同步测速法 (如机械式或闪光式频闪测速仪 )以及计数测速法。
计数测速法又可分为机械式定时计数法和电子式定时计数法。
对转速的测量实际上是对转子旋转引起的周期脉冲信号的频率进行测量。
在频率的工程测量中 ,电子式定时计数测量频率的方法一般有三种 :①测频率法 :在一定时间间隔t内 ,计数被测信号的重复变化次数N ,则被测信号的频率fx可表示为fx =Nt(1);②测周期法 :在被测信号的一个周期内 ,计数时钟脉冲数m0 ,则被测信号频率fx=fc/m0 ,其中 ,fc为时钟脉冲信号频率;③多周期测频法 :在被测信号m1个周期内 ,计数时钟脉冲数m2 ,从而得到被测信号频率fx,则fx可以表示为fx=m1fcm2,m1由测量准确度确定。
二、系统整体方案设计1、系统框图各部分模块的功能:①传感器:用来对信号的采样。
②放大、整形电路:对传感器送过来的信号进行放大和整形,在送入单片机进行数据的处理转换。
④片机:对处理过的信号进行转换成转速的实际值,送入LED⑤LED显示:用来对所测量到的转速进行显示。
2光电式转速传感器:光电式传感器是将被测量的变化转换成光信号的变化,再通过光电器件把光信号的变化转换成电信号的一种传感器。
基于加速度传感器的速度及路程测量系统
Sk
h ( f ( xk ) 4 f ( x 1 ) f ( xk 1 )) k 6 2
Simpson 公式中每一个小微段用到三个点积分,所以我们积分时对每三个点进行积分从 而得到如下的公式
其中
h
是采样周期的二倍,
n
a 为采集到的加速度,n 为信息处理的周期。
n/ 2 n/ 2 h Vt Vk (a0 4 a2 k 2 a2 k 1 an ) 6 k 0 k 1 k 1
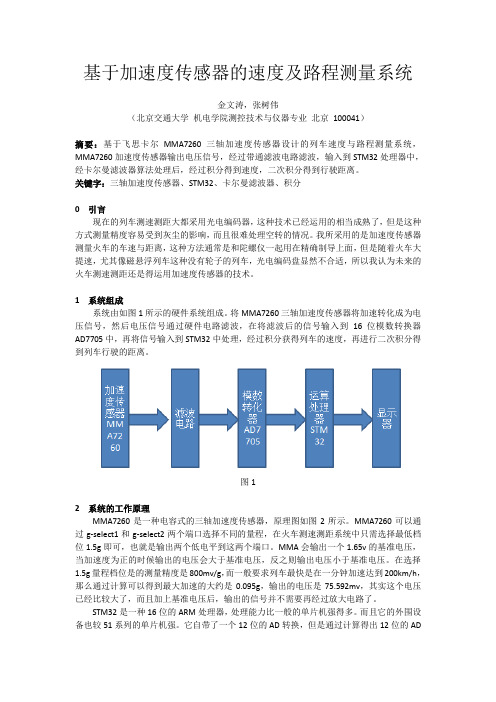
图1 2 系统的工作原理 MMA7260 是一种电容式的三轴加速度传感器,原理图如图 2 所示。MMA7260 可以通 过 g-select1 和 g-select2 两个端口选择不同的量程,在火车测速测距系统中只需选择最低档 位 1.5g 即可,也就是输出两个低电平到这两个端口。MMA 会输出一个 1.65v 的基准电压, 当加速度为正的时候输出的电压会大于基准电压,反之则输出电压小于基准电压。在选择 1.5g 量程档位是的测量精度是 800mv/g, 而一般要求列车最快是在一分钟加速达到 200km/h, 那么通过计算可以得到最大加速的大约是 0.095g,输出的电压是 75.592mv,其实这个电压 已经比较大了,而且加上基准电压后,输出的信号并不需要再经过放大电路了。 STM32 是一种 16 位的 ARM 处理器, 处理能力比一般的单片机强得多。 而且它的外围设 备也较 51 系列的单片机强。它自带了一个 12 位的 AD 转换,但是通过计算得出 12 位的 AD
图2
图3 系统软件流程图 软件系统采取的是卡尔曼滤波器对数据进行软件滤波,然后再利用辛普森公式进行积 分,软件流程图如图 4 所示。卡尔曼滤波器(Kalman Filter)是一个最优化自回归数据处理 算法(optimal recursive data processing algorithm) 。对于解决很大部分的问题,他是最优, 效率最高甚至是最有用的。他的广泛应用已经超过 30 年,包括机器人导航,控制,传感器 数据融合甚至在军事方面的雷达系统以及导弹追踪等等。近年来更被应用于计算机图像处 理,例如头脸识别,图像分割,图像边缘检测等等。 现设线性时变系统的离散状态防城和观测方程为: X(k) = F(k,k-1)· X(k-1)+T(k,k-1)· U(k-1) Y(k) = H(k)· X(k)+N(k) 3 其中 X(k)和 Y(k)分别是 k 时刻的状态矢量和观测矢量 F(k,k-1)为状态转移矩阵 U(k)为 k 时刻动态噪声 T(k,k-1)为系统控制矩阵 H(k)为 k 时刻观测矩阵 N(k)为 k 时刻观测噪声 则卡尔曼滤波的算法流程为: 预估计 X(k)^= F(k,k-1)· X(k-1) 计算预估计协方差矩阵 C(k)^=F(k,k-1)×C(k)×F(k,k-1)'+T(k,k-1)×Q(k)×T(k,k-1)' Q(k) = U(k)×U(k)' 计算卡尔曼增益矩阵 K(k) = C(k)^×H(k)'×[H(k)×C(k)^×H(k)'+R(k)]^(-1) R(k) = N(k)×N(k)' 更新估计 X(k)~=X(k)^+K(k)×[Y(k)-H(k)×X(k)^] 计算更新后估计协防差矩阵 C(k)~ = [I-K(k)×H(k)]×C(k)^×[I-K(k)×H(k)]'+K(k)×R(k)×K(k)' X(k+1) = X(k)~ C(k+1) = C(k)~ 重复以上步骤 在对加速度信号进行处理之后我们得到了一组可以积分的加速度信号。 为了获得比较 高的积分精度,我们采用了 Simpson 公式进积分 在每个小区间 xk , xk 1 使用 Simpson 公式
火车车速监控系统设计

EPC和RFID技术课程设计(论文)火车车速监控系统设计院(系)名称电子与信息工程学院专业班级物联网121班学号120402007学生姓名薛红见指导教师贾旭副教授起止时间:2015.12.21—2016.1.1课程设计(论文)任务及评语院(系):电子与信息工程学院教研室:物联网工程本科生课程设计(论文)目录第1章绪论 (1)1.1我国铁路的发展史 (1)1.2系统设计思想 (2)1.3方案的提出 (3)第2章需求分析 (4)2.1系统的设计分析 (4)2.2 系统组成 (5)2.3 系统网络连接 (5)2.4 系统器件分析 (6)第3章ZigBee技术 (8)3.1ZigBee技术 (8)3.2 ZigBee技术特点 (8)3.3 ZigBee的应用 (9)3.4 标准限定 (9)第4章系统详细设计与编码 (11)4.1系统设计模块 (11)4.2程序代码 (12)第5章系统的维护 (17)第6章总结 (18)参考文献 (19)第1章绪论1.1我国铁路的发展史中国铁路迄今已有100多年的历史:从其第一条营业铁路——上海吴淞铁路——1876年通车之时算起,是123年;从其自办的第一条铁路——唐胥铁路——1881年通车之时算起,也有118年了。
百余年来,中国的铁路事业经历了新旧两个根本性质不同的社会。
无论从政治上还是从经济上,这都决定了它在其发展历程中必然会遭遇到两种迥然不同的命运和前途。
旧中国的铁路事业,虽是史无前例的产业,但却带有半封建半殖民地的性质。
它的建设、发展和经营都被控制在帝国主义、封建主义和官僚资本主义的手里,其发展之缓慢和经营之惨淡,自不待言。
新中国的铁路事业虽以旧中国的铁路设备为其物质基础,但由于在共产党和人民政府领导下,一贯坚持自力更生、艰苦奋斗、勤俭建国的方针,70年代后期以来又贯彻执行改革开放的政策,不仅迅速而彻底地改变了旧铁路的半封建半殖民地性质,而且取得了前所未有的辉煌成就。
传感器课程设计列车测速测距系统
传感器原理及应用课题研究课题名称:列车测速测距系统院系:机械与电子控制工程学院专业:测控技术与仪器目录一、各种检测方式与比较..................................................................................... - 2 -(一)测速电机....................................................................................... - 2 -(二)光电式........................................................................................... - 2 -(三)GPS ............................................................................................... - 2 -(四)航位推算系统............................................................................... - 2 -(五)雷达测速....................................................................................... - 3 -(六)未来的方向................................................................................... - 3 -二、传感器的选择及安装..................................................................................... - 3 -三、光电转速传感器的系统设计......................................................................... - 4 -(一)光电传感器.......................................................................................... - 4 - (二)调理电路.............................................................................................. - 5 - (三)测量系统主机部分设计...................................................................... - 8 -①单片机................................................................................................... - 8 -②程序模块设计..................................................................................... - 10 -③主程序流程图程序流程图................................................................. - 11 -④动态显示仿真..................................................................................... - 12 - 四、雷达部分....................................................................................................... - 13 -(一)雷达测速系统.................................................................................... - 13 -①雷达测速原理及安装......................................................................... - 13 -②系统框图............................................................................................. - 14 -③环节选型............................................................................................. - 14 - 五、修正部分....................................................................................................... - 15 -(一)定位技术背景.................................................................................... - 15 - (二)多传感器融合测速方法及问题........................................................ - 16 - (三)修正方法............................................................................................ - 17 - (四)列车打滑实验的传感器速度曲线.................................................... - 18 -六、无线传输....................................................................................................... - 19 -七、电源............................................................................................................... - 20 -八、参考文献....................................................................................................... - 20 - 附录A 光电传感系统总程序清单....................................................................... - 21 -摘要:目前, 安全问题日益受到重视, 使得对各种列车运行控制系统的研究不断加强, 列车速度和位置的检测, 作为实现系统功能的先决条件也就显得越来越重要。
动车组测速测距系统设计传感器研究性作业
如果投射的光线因检测物体不同而被遮掩
或反射,到达受光部的量将会发生变化。受光
信 号 采 集 模 块
部将检测出这种变化,并转换为电信号,进行 输出,这样就实现了光—电的转换。大多使用 可视光(主要为红色,也用绿色、蓝色来判断 颜色)和红外光。
系统方案
CRH5 型动车组传动系统
为测量动车速度,我们打算测量万向轴的转速来换算成动车 运行速度。本次课程设计使用点光源激光器发出激光束,在对 侧感光二极管接收激光,通过周期性的遮光和挡光,将光信号 的变化转化为点信号的变化,再对电信号处理及计算,实现对 动车模型速度的测量。
系统方案
我们小组设计将一个多孔光圈盘(测速齿轮)安装 在万向轴上,随着万向轴的转动,光源发出的光线 不断的通过和被阻挡,使光电式传感器产生周期变 化的电信号(即电脉冲),然后将光电传感器采集 信号,经滤波、放大、整形后,传输到计数器(可 用单片机的定时器T0/T1中断实现),得到脉冲信号 的频率f,(假定设计的多孔光圈盘的小孔数目是 a),于是万向轴的转速可通过式(单位:r/min)。 这样,万向轴的转速变为测单位时间脉冲数。
当投射光线照射到光敏元件时,光敏元件 受到光照后产生电流,CE导通,光敏三极管饱 和导通,输出为高电平“1”;当投射光线被遮
挡时,光敏三极管截止,CE不通,光敏三极管
截止,输出为低电平“0”。
低频滤波器 信号隔离
调理模块 各
个 环 节
运算放大器 施密特整形
调理电路
施密特整形
13
信号隔离
A
作用
原理
设计中,我们采用的是光电隔离,也叫光耦隔离。光电 耦合器件将发光元件和受光元件组合在一起,通过电光-电这种转换,利用“光”这一环节完成隔离功能, 使输入和输出在电气上是完全隔离的。
测速系统课程设计

测速系统课程设计一、课程目标知识目标:1. 学生能够理解测速系统的基本原理,掌握速度的计算公式。
2. 学生能够识别并描述不同类型的测速仪器,了解其工作原理及应用场景。
3. 学生能够掌握物理中速度、加速度等基本概念,并运用相关知识解决实际问题。
技能目标:1. 学生能够运用所学知识,设计简单的测速实验,并正确操作仪器进行数据采集。
2. 学生能够运用数据处理软件,对测速数据进行处理和分析,得出准确的结果。
3. 学生能够通过小组合作,共同探讨测速问题,提高沟通与协作能力。
情感态度价值观目标:1. 学生能够对物理学产生兴趣,认识到科学知识在实际生活中的重要性。
2. 学生能够培养勇于探究、积极思考的科学精神,形成良好的学习习惯。
3. 学生能够关注交通安全,提高遵守交通规则的意识,树立正确的价值观。
本课程针对中学生设计,结合学生好奇心强、求知欲旺盛的特点,以实际生活中的测速问题为切入点,激发学生的学习兴趣。
课程注重理论与实践相结合,通过实验、数据处理和小组讨论等形式,提高学生的动手操作能力和团队合作能力。
课程目标旨在培养学生掌握测速相关知识,提高科学素养,同时关注交通安全,树立正确的价值观。
为实现课程目标,后续教学设计和评估将围绕具体学习成果展开。
二、教学内容1. 测速系统的基本原理- 速度、加速度的定义与计算公式- 速度与加速度的关系2. 常见测速仪器的认识- 轮速传感器- 雷达测速仪- 激光测速仪- GPS测速仪3. 测速实验与数据处理- 实验设计:设计简单的测速实验,如小车加速直线运动测速- 数据采集:使用轮速传感器等仪器收集数据- 数据处理:运用Excel等软件进行数据处理,计算速度、加速度等4. 实际应用与案例分析- 交通测速:介绍交通测速仪器的应用场景,分析实际案例- 运动测速:如体育比赛中速度测量,了解运动速度分析5. 小组讨论与展示- 分组讨论:针对测速问题进行小组讨论,分析不同测速方法的优缺点- 展示成果:各小组展示实验过程和结论,交流学习心得教学内容根据课程目标进行选择和组织,注重科学性和系统性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
单片机
数据处理核 心(进行数 据处理运算)
列车监控系 统
环节选型
1.雷达微波部分:选用NJR4211的微波模块,发射频率为24.15GHz,输 出功率为4mW。 2.信号处理电路:放大滤波
3.A/D转换Leabharlann 路:选择ADI公司的AD644。可输出带宽250MHz。
4.单片机:选择AT89C51,与光电转速传感器频率输出接口兼容。
多传感器融合测速方法
列车定位过程
1.当遇到信标时,系统先检查信标的位置坐标是否在当前计算 的列车位置误差范围之内。 2.系统根据上一个信标的位置,不断计算从上一个信标开始的 位移和位置误差,并以此来计算列车当前位置(包括列车前端 和后端的位置误差)。
列车打滑实验的传感器速度曲线
无线传输
数据的传输流程
LM134
光电式转速传感器的调理电路
光电式转速传感器的调理电路
整形电路设计的是一种滞回电压比较器,它具有惯性,起到抗干扰的 作用。从而向输入端输入的滞回比较器。在整形电路的输入端接一个 电容C5(103),起到的作用是阻止其他信号的干扰,并且将放大的 信号进行滤波,解耦。 形后的信号基本上为±5V的电平的脉冲信号,在脉冲计数时,常用的 是+5V的脉冲信号。如果直接采用-5V的脉冲计数,会增加电路的复 杂性,故一般不直接使用,而是先进行二次整形。
快捷方便、
GPRS/G 实验室, 本、异地 单片机采 SM无线 手持设备 等终端(读, 集数据 实时 网络 存数据)
数据采集
无线传输
DTP_S05C DTP_S05Ci传输模块
◆ ◆ ◆ ◆ ◆ ◆ ◆ ◆ ◆ ◆ ◆ ◆ 针对GPRS数据业务, 嵌入了TCP/IP协议栈 标准RS-232串口,简单的AT+i指令操作 SerialNet透明模式,简化了二次开发过程 支持域名解析,可以不用固定IP 提供单片机和计算机编程源代码 频段为双频900MHz和1800MHz 最大发射功率:2W 工作温度:-25 — +60℃ 工业标准设计,能工作于各种恶劣环境 天线接口 50Ω /SMA(阴头) 直流5~12V供电,电流待机40mA,发射时300mA 铝合金外壳体积为:53×97×27mm
选型
各种检测方式与比较
未来的发展方向: 综合化; 采用智能化、数 字化的处理方法; 各种方法如何提 升测量精度;整 合化系统。
传感器的安装方式
光电转速传感器 此检测装臵根据实际安装情 况位臵进行安装。如右图,将信号 盘固定在车轮转轴上,光电转速传 感器正对着信号盘。
雷达
如图
光电式转速传感器
问题
1.以车轮转动作为采集对象间接获取列车速度:车轮磨损产生的轮径变 化、运行过程中的空转和滑行会产生较大的误差。 2.雷达和航位推算系统是直接测量列车速度和距离的方式,不存在车轮 磨损、空转、滑行等造成的误差。但是,多普勒雷达测速方法比较复 杂,需要考虑雷达校正、不同地面反射系数等问题 3.航位推算系统受到传感器本身温漂、敏感度等的影响,在短时间内测 量具有较高的精度,但长时间使用会导致较大的累积误差。
各种检测方式与比较
各种检测方式与比较
GPS 不足: ①当线路平行股道十分接近 或有多个列车进出站时, 难以 识别列车占用的是哪一股道; ②在地形复杂地段, 例如在山 区和隧道内, 由于无线电波传 播特性的影响会产生信号盲 区。
各种检测方式与比较
测速电机 从应用情况看, 测速电机方式虽 然比较简单, 但在低速时感生电动 势较低, 造成测量精度降低, 车速低 于一定值时甚至不能推动测速单元 工作, 并且系统可靠性较差。
列车测速测距系统
小组分工
word版研究报告制作
雷达部分; 光电转速传感器 传感器的选型 修正系统 的系统设计 供电,传输方式, 组员: PPT制作
摘要
随着铁路大提速,列车运行速 度越来越快,传统的测速方法 存在一些不足之处。为此本文 提出了一种适合列车运行中实 时监测的多传感器融合的测速 测距系统。论文重点研究了多 传感器的优劣以及信息融合在 城市轨道交通列车测速定位的 应用。以信息融合技术为基础, 研究以速度传感器为核心的多 传感器融合列车测速定位系统, 并且有效地防止空转等故障现 象的发生。
修正部分
一.定位技术背景 1) 脉冲转速传感器是通过列车车轮转动产生数字脉冲,输出脉冲信号通 过信号处理后,可直接输入微处理器进行计算,得到高测量精度的速 度、距离信息。 2) 多普勒雷达依靠雷达向地面发射信号,检查雷达回波频率与发射信号 频率的不同,根据多普勒效应计算列车的运行方向和速度,再对列车 的速度进行积分,得到列车的运行距离。 3) 航位推算系统一般使用惯性传感器作为航向传感器和位移传感器,具 有不与外界发生光电联系和不受气候条件限制的特点。
SZGB-3型传感器主要性能介绍如下:
(2)输出信号幅值:50r/min时30mV
(3)测速范围:50---5000r/min (4)使用时间:可连续使用,使用中勿需加润滑油 5)工作环境:温度-10~40℃,相对湿度≤85%无腐蚀性气体
光电式转速传感器的调理电路
因为SZGB-3型传感器 50r/min时30mV,单片 机输入电压0~5伏左右, 调理电路放大倍数在100 倍左右。 采用两级放大电路,每一 级都采用反响比例运算电 路如图4.4.设计的电压放 大倍数为100倍。其中第 一级放大倍数为10,第 二级放大倍数为10.放大 后电压变化范围为0~ 4.8V。
各种检测方式与比较
光电式转速传感器 由于车轴的转动直接反映列车的 运动, 因此可以利用车轴转动信息 获得列车的运行速度,所以我们可以 采用光电式转速传感器。不足:由 于利用轮轴旋转信息进行测速测距, 不可避免地受到车轮走行状态的影 响。
各种检测方式与比较
航位推算系统 受到传感器本身温漂、敏感度等 的影响,航位推算系统在短时间内 测量具有较高的精度,但长时间使 用会导致较大的累积误差,因此在 使用航位推算系统进行列车测速定 位时,需要解决累积误差的补偿问 题。所以单独使用航位推算系统是 不可行的。
软件设计
主程序流程图 子程序流程图 定时计数子程序流程图
动态显示仿真
雷达测速原理及安装
测速公式: 雷达测速频段:3MHZ~300MHZ fo为发射波段,选用24.15GHZ
喇叭天线
为了使机车测速的探测距离达到5~10米,需要外加喇叭天线。
雷达部分系统框图
雷达微波 部分 信号调 理电路 A/D转换
仿真
程序模块设计
软件部分由数据处理程序、按键程序设计、中断服务子程序、 LED显示程序等几个部分组成。 数据处理完成对各种测量数据的处理,如各种数据的计算、数 据格式的转换等。 按键程序包括按键防抖动处理、判键及修改项目等。定时器1完 成定时功能,定时2Oms,并每隔20ms进行一次显示,每隔1秒读一 次计数结果。单片机对在1秒内计数的值进行处理,转换成每分钟的 速度送显存以便显示。
光电式传感器是将被测量的变化转换成光信号的变化,再通过 光电器件把光信号的变化转换成电信号的一种传感器。传感器的输出 信号易于数字化处理,满足列车运行控制系统智能化、小型化的发展 趋势。另外,它具有频谱宽、不易受电磁干扰的影响、非接触式测量、 响应快、可靠性高等优点。
光电式转速传感器
选用的传感器型号为SZGB-3
光电式转速传感器
SZGB-3, 20电源电压为12V DC SZGB-3型传感器主要性能介绍如下: 1)供单向计数器使用,测量转速和线速度.
2)采用密封结构性能稳定.
3)光源用红外发光管,功耗小,寿命长. 4) SZGB-3, 20电源电压为12V DC SZGB-3.型光电转速传感器,使用时通过连轴节与被测转轴连接,当转 轴旋转时,将转角位移转换成电脉冲信号,供二次仪表计数使用。 (1)输出脉冲数:60脉冲(每一转)
各种检测方式与比较
雷达测速 雷达测速是一种直接测量速 度的方法,可以直接得到列车 实际的运行速度,不需要通过 车轮转动的信息来间接测量。 在机车上安装雷达, 始终向轨面 发射电磁波, 由于机车和轨面之 间有相对运动, 根据多普勒频移 效应原理, 在发射波和反射波之 间产生频差,通过测量频差可以 计算出机车的运行速度, 并累积 求出走行距离。有效地防止空 转、滑行外, 也推动了定位停车 装臵的开发。不足:由于信号 传输波段有时会受到干扰。
电源
我们的电源方案设计
可调输出三端稳压器
单片机与 微波模块
直接供电
型号:24V6AH (铅酸免维护蓄电池)
谢
谢!