车牌照字符倾斜校正方法的研究
车牌倾斜矫正算法的比较研究

= 三 =
观 察 () 可 以发 现R d n 换 的一 个 重 要 性 质 , 8 3式 ao 变 即R D f ) 据 此性 质 , 们 在 做 R d n 换 时 , , 根 我 ao 变 的取 值 范 围 只 需 要
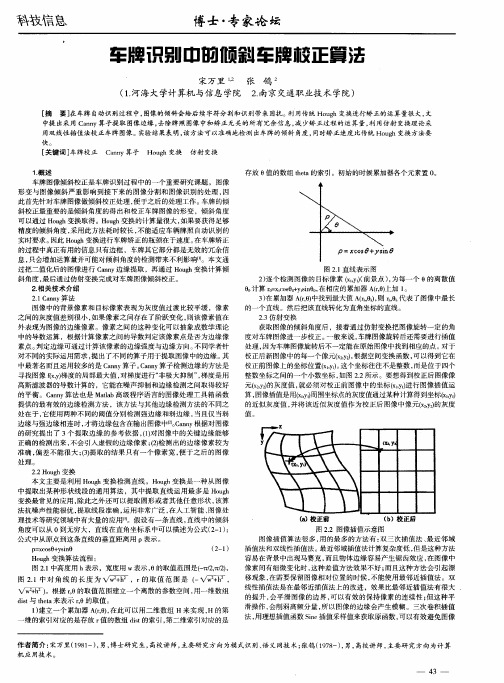
p x o0 y i0 =c s+s n () 2 式 其 中 P表 示 圆 点 到 直 线 的 距 离 . O是 该 直 线 与 x 的 夹 角 。 的 图 像 , 先 确 定 合 适 的0 范 围 , 图像 的倾 斜 角 度 误 差 J 之 轴 事 的 因 度 这 样 直 角 坐 标 系 中 的一 条 直 线 就 对 应 于 极 坐 标 系 中 的 一 个 点 . 内 不会 影 响 到后 续 车 牌 字 符 的 分 割 及 字 符 识 别 的准 确 率 。可 以 日 而 直 角 坐 标 系 中 的一 点 则 对应 于 极 坐 标 系 中 的 一 条 正 弦 曲线 。 J 为 步 长 取 遍 取 值 范 围 内的 所 有 角 度 。 用 R dn 换 后 。 一 度 运 ao 变 每
一
R( = f ’ Yi, i一 sd (式 ’ 』( O O'0Y0 )’ 3 ) x S— s n OO ) C n s y
其中 r [o0 ] cs
li 一n e
Rao d n变 换 的 实 质 是 求 原 始 图 像 在 任 意 角度 0上 的投 影 。
21 0 0年第 6期
福
建 电
脑
6 5
车牌 倾斜矫 正算 法的 比较研 究
李 文 趋
(泉 州 师 范 学 院 数 学 与 计 算 机 学院 福 建 泉 州 3 2 0 ) 60 0 【 摘 要 】 本 文 分 析 目前 车 牌 倾 斜 矫 正 中常 h 的 Hog : l uh变换 和 R dn变换 , 过 实验 对 比发 现 R d n变换 相 对 H uh ao 通 ao o g
车牌识别中的倾斜车牌校正算法

车牌识别中的倾斜车牌校正算法
车牌识别是现代交通管理中不可或缺的技术之一。
然而,在实际应用过程中,会遇到一些车牌倾斜的情况,导致车牌识别率下降。
因此,研究车牌倾斜校正算法对车牌识别具有重要意义。
车牌识别中的倾斜车牌校正算法是针对车牌图像中出现的倾斜问题进行修正的算法。
它是通过对车牌图像进行预处理,将车牌图像进行倾斜校正,使得车牌上的字符垂直排列,以便于后续的字符识别。
在倾斜校正的过程中,常见的算法有基于角度旋转的算法、基于投影的算法、基于边缘的算法等等。
其中,基于角度旋转的算法是较为常见的一种方法。
它通过计算车牌的倾斜角度,然后进行图像的旋转,使得车牌上的字符垂直排列。
而基于投影的算法则是利用车牌上的字符进行投影,通过寻找字符的最小外接矩形,进而对图像进行校正。
基于边缘的算法则是利用车牌的边缘信息,进行边缘检测和霍夫变换,来计算车牌的倾斜角度,从而实现倾斜校正。
总的来说,车牌识别中的倾斜车牌校正算法是车牌识别技术中重要的一环。
通过对车牌图像进行倾斜校正,能够有效提高车牌识别的准确率和稳定性。
基于子区域投影分析的车牌倾斜校正

车牌识别 倾斜校正 错切变换 投影分析 智能交通
T 9 17 T 3 14 N 1 .3 P 9 .1 文献标识码 A
LI CENSE PLATE SLANT CoRRECTI ON BAS ED ON ANALYS NG I
THE PRoJ ECTI oN PRoFI LES oF S UB- REGI oNS பைடு நூலகம்
M a H o g i n xa
( oeeo c neB in oe nvrt, C lg l fSi c, eigF rs U i sy & e j t ei
1 08 C ia 00 3,hn )
A s at bt c r
A l es lt s n or t nme o ae naa s g h rj t npo l f u — g n rp sd i th oi n l cnepa at r ci t db sdo nl i epo ci rfe o sbr i ss o oe .Fr ehr ot i el c e o h yn t e o is e o ip st z a
drco . h r et n nsbrg n r ue o p t t he as r n e i r etno cne lei g ee ieh i tn T epo c os — i s e sdt cm ue h serr fm advrc po co l es a et dt n e ei j i o u eo a o e tn o ta j i f i l p t ma o r m t
针对垂直倾斜校正 的方法 主要有 : 旋转投 影法 ’ 直线拟 、
0 引 言
车牌 识别技术是智能交通 的关键技 术之一 , 泛应用 于高 广 速公 路 自助收费 、 市交通控 制与监视 等领域 。车 牌识别 技术 城
几种车牌图像倾斜角度矫正算法

几种车牌图像倾斜角度矫正算法在车牌识别领域中,图像的倾斜会对识别效果造成一定影响,因此对车牌图像进行倾斜矫正至关重要。
下面将介绍几种常见的车牌图像倾斜角度矫正算法。
1. 直线检测法直线检测法是一种常见的图像倾斜矫正方法,其基本思路是通过Hough变换检测车牌上的直线,然后根据检测到的直线的斜率来计算车牌的倾斜角度,最后对车牌进行旋转矫正。
使用直线检测法进行倾斜角度矫正的优点是算法简单易懂,适用于各种类型的车牌图像。
但是,由于车牌图像中存在干扰线条等因素,因此直线检测的准确性受到限制。
同时,该方法也存在计算量较大的问题。
2. 边缘检测法边缘检测法是一种常见的图像处理方法,在车牌图像倾斜矫正中也有广泛的应用。
该方法的基本思路是,通过边缘检测算法检测车牌图像的边缘,进而计算出车牌的倾斜角度。
最后对车牌进行旋转变换矫正。
与直线检测法相比,边缘检测法计算量较小,因此运行速度较快。
但是,由于车牌图像中存在噪点等因素,因此该方法的准确性也存在一定的局限。
3. 预处理法预处理法是一种非常有效的车牌图像倾斜矫正方法。
该方法的基本思路是,通过图像预处理算法对车牌图像进行处理,得到车牌上的字符或特征信息,进而计算出车牌的倾斜角度。
最后对车牌进行旋转矫正。
相比于直线检测法和边缘检测法,预处理法更加准确有效。
但是,该方法需要对车牌图像进行预处理,因此算法复杂度较高。
4. 模板匹配法模板匹配法是一种基于模板匹配的车牌图像倾斜矫正方法。
该方法的基本思路是,利用车牌模板进行匹配,找出车牌上的特征区域,进而计算出车牌的倾斜角度。
最后对车牌进行旋转矫正。
由于车牌模板具有良好的特征性,因此该方法对车牌图像的倾斜角度矫正具有很好的效果。
但是,由于模板匹配过程中需要对车牌模板进行匹配,因此算法复杂度较高。
同时,该方法也需要预先准备车牌模板,对通用性存在一定的限制。
结论以上介绍了几种常见的车牌图像倾斜角度矫正方法,每种算法都各有优缺点,应根据实际情况选择合适的算法。
车牌识别中的倾斜车牌校正算法
整数坐标之间的一个 小数坐标 , 如图 2 所示。要想得到校正后 图像像 - 2 元(, 的灰度值 , xy 2 就必须 对校 正前图像 中的坐标 xY进 行图像插值 运 ) 算, 图像插值是用(, 周围坐标点 的灰度值通过某种计算得到坐标 ( Y xy D x ) 的近似灰度值 , 将该近似灰度 值作为校正后 图像 中像元 xy 的灰 度 并 :2 ,)
2相 关 技 术 介 绍 .
\
口 XC S ̄+ysn O i
21 a n 算法 .C n y 图像 中的背景像 素和 目标像素表现为灰度值过 渡比较平缓 ,像素 之 间的灰度值 差别很 小 , 如果像 素之间存在 了阶跃变化 , 则该像素值在 外 表现为图像 的边缘像 素。像素之间 的这种变化 可以抽 象成数学理论 中的导数 运算 , 根据计算像 素之间的导数判定该像 素点 是否为边缘像 素点。 判定边缘可通过计算该像素 的边缘强度与边缘方 向。 同学者针 不 对 不同的实际运 用需求 , 出了不 同的算子用 于提取 图像 中的边缘 。 提 其 中最著名 而且运用较 多的是 C n y a n 算子。 a n 算子检测边缘的方法是 Cn y
图 21 .直线表示图 2 逐个检测图像 的 目 ) 标像素 ( Y ( 景点 )为每一个 0 x ) 前 , 的离散值 0 计算 r xcs0y i0, o o l 0+ ln o在相应 的累加器 Ar ) = o s (e上加 1 , 。 3 在累加器 a r ) ) (0 , 中找到最大值 A ro , r (,)则 h 代表 了图像 中最 长 hh , 0 的一个直线。然后把该 直线转化为直角坐标 的直线 。 2 3仿射变换 获取图像的倾斜角度后 ,接着通过仿射变换把图像旋转一定 的角 度对车牌图像 进一步校正。 一般来说 , 车牌 图像旋转后还需要 进行插值 处理 , 因为车牌图像旋转后 不一定 能在原始图像 中找到相应的点。 于 对 校正后新图像中的每一个像元 x,1根据空间变换 函数 , 以得 到它 在 2 v, 可 校正前图像上的坐标 位置(,. 这个坐标往往不是整数 , xy 。 。) 而是位于四个
车牌定位和倾斜校正的关键技术研究
I
Abstract
License plate recognition system is an import part of the Intelligent Transportation Systems and it has a great applications. The license palte recognition system includes three modules: location, character segmentation and recognition. The paper is made a research on the three modules, and the specific contents are as follows: 1. In the license palte location, it is proposed a method based on HSI color model and the color edge to locate the car plate. Firstly, the color image is converted from the RGB color space to the HSI color space, and according to the color characteristics of the license plate to set the threshold value of the HSI components. Removing the region that dose not comply with the conditions, and then it can get the candidate region of the license plate. Then detecting the edges of the image by the features of the character color and the background color in the license plate image, and the pseudo-plate areas are removed through the geometric characteristics of the license plate. Finally, the license plate image is projected to obtain the starting position of the license plate, and thus it could get the final positon of the license plate. The method can locate the license plate accurately in the image with the complex background, and it has strong robustness. 2. In the part of the character segmentation, the paper first corrects the tilt license plate image. According to the feature of the horizontal and vertical projection on the license plate image, it is proposed an improved method that based on rotation projection. The method can reduce the computation time and detect the tilt angle accurately. In the character segmentation, the paper used the feature of the character size on the license plate and the size of the vertical projection to split the characters. The method is also made effective process on the situation as the congutination character, fracture character and so on, and it also improves the accuracy of the character segmentation. 3. In the part of the character recognition, it is used the method of the support vector machine to identify the license plate characters. First, it is used the method that is based on pixel by pixel and counting the blocked features to extract the character features. Then according the characteristics of the character features to constructe the classifiers, and by the bilinear method to determine the best classifier. Finally, the characters are recognized through the features of the arrangement on the characters, and the recognized results are put together to obtain the license plate number. The experimental results show that the method has a high recognition rate and recognition speed. Key words: License plate recognition, Tilt correction, License plate location, Support Vector Machine, Color model, Projection, Character segmentation
车牌识别中倾斜牌照的快速矫正算法概要
车牌矫正是车牌定位和字符分割间的一个重要处理过程。
经过车牌定位后所获取的车牌图像不可避免地存在某种程度的倾斜。
这种倾斜不仅会给下一步字符分割带来困难,最终也将对车牌识别的正确率造成直接地影响。
因此要找到一种方法能够检测车牌图像是否水平以及它倾斜的精确角度。
车辆牌照都有上下边框,因此通过检测车牌边框直线的倾斜角度以获得车牌的倾斜角度是一种可行的方法。
变换在数字图像处理技术中是一种检测直线以Hough 及其他几何形状的有效算法,变换检测几何形状的过Hough 程实际上是一个参数猜想过程,它先把直角坐标系中的目标点映射到一个参数坐标系,即先把直角坐标系平面上几何形状上的所有点积累到极坐标系平面的同一点集中去,然后通过寻找极坐标系中点集的峰值来寻找几何特征。
由于这种点集是通过积累统计得到的,因此它具有较强的鲁棒性。
文献中提出中倾斜矫正的方法,文献中提出[4,5]OCR [6]利用车牌边缘特征进行变换矫正车牌倾斜的方法。
但Hough 变换的计算量很大,如果要获得足够精度的倾斜角Hough 度,采用此方法耗时较长,不能适应车辆牌照自动识别的实时要求。
因此变换进行车牌矫正的瓶颈在于速度。
在Hough 车牌矫正的过程中真正有用的信息只有边框,车牌其它部分都是无效的冗余信息,只会增加运算量并可能对倾斜角度的检测带来不利影响。
为此本文提出采用轮廓跟踪和变Hough 换分级检测两种方法共同来提高车牌矫正的快速性。
车牌边框的轮廓提取1 车牌矫正是在完成车牌定位和车牌图像的二值化后进行的。
为了加快矫正速度,最大程度地减少运算时的冗余数据,本文提出采用轮廓跟踪以获取车牌图像的外围轮廓特征。
要获得车牌完整的轮廓要求车牌边框的外围应当是封闭的,但由于拍摄条件和环境的影响,车牌二值图中边框部分可能出现间断,因此首先要对车牌图像进行处理。
数学形态学处理1.1 数学形态学是由一组形态学的代数运算子组成,其中最基本的是腐蚀算子和膨胀算子,运用这些算子及其组合可以对图像结构和形状进行分析和处理。
车牌倾斜校正的方法

车牌倾斜校正的方法
车牌要是倾斜了,可有点小麻烦呢。
咱得想办法把它校正过来呀。
有一种简单的办法是利用图像编辑软件。
如果是那种不是特别严重的倾斜,像在电脑上用Photoshop。
你打开有车牌图像的文件后,在菜单里找那个“自由变换”的功能,通常是快捷键Ctrl+T(Windows系统哦)。
这时候图片四周就会出现小方块,你就可以用鼠标拖动这些小方块来调整车牌的角度啦。
就像摆弄小玩具一样,把车牌摆到正正的位置。
不过这个得有点耐心,慢慢调整,可别一下子调过头咯。
还有呀,如果是想通过编程来校正车牌倾斜,那对于懂代码的小伙伴来说也不难。
比如说用Python语言和OpenCV库。
先把车牌图像读进去,然后通过一些算法来检测车牌的边缘。
检测到边缘之后呢,就可以根据边缘的角度来计算出车牌倾斜的角度啦。
再用旋转函数把车牌旋转到正确的角度。
这就像是给车牌做了一场精确的手术,让它“站”得笔直。
不过这对编程小白来说可能有点难,得花点时间去学习那些代码和算法呢。
要是不想这么复杂,还有一些专门的车牌识别软件本身就带有校正功能。
你只要把有倾斜车牌的图像或者视频导入到这个软件里,它就能自动把车牌校正过来,然后识别出车牌号码。
这就像是请了个小助手,它特别聪明,一下子就把问题解决了。
不管用哪种方法,校正车牌倾斜都是为了能更好地识别车牌,或者让车牌看起来更规范。
就像我们整理自己的仪容仪表一样,车牌也得整整齐齐的呢。
所以呀,要是遇到车牌倾斜的情况,别发愁,这么多办法总能找到适合你的那个小妙招。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Abstract It p resen t s the m ethod of lean licen se p late character co rrect ion based on Hough and R adon t ran sfo rm. It u t ilizes the Hough t ran sfo rm in detect ing the top and bo t tom edges and co rrect ing ho rizon tal lean, and u t ilizes the R adon t ran sfo rm in co rrect ing vert ical lean of the p late. T he exp erim en t show s that the m ethod m in im izes the difficu lty of character iso lat ion after second co rrect ion and m akes fo r the po sterio r character recogn it ion. Key words L icen se p late L ean co rrect ion Hough t ran sfo rm R adon t ran sfo rm
第 25 卷第 4 期增刊 仪 器 仪 表 学 报 2004 年 8 月
ห้องสมุดไป่ตู้
车牌照字符倾斜校正方法的研究Ξ
杨立刚1 张兴会2 李兰友1
1 (天津工业大学计算机系 天津 300160) 2 (天津技术师范学院 天津 300222)
摘要 提出了一种车牌照字符倾斜的校正方法, 该方法基于 Hough 变换和 R adon 变换。用 Hough 变换检测车牌照上下两边, 并对水平倾斜的牌照进行水平校正, 再用 R adon 变换检测字符垂直倾斜角度并进行垂直校正, 实验结果表明车牌图像经过二 次校正大大减少了字符切分的困难, 有利于后面字符的正确识别。 关键词 车牌照 倾斜校正 Hough 变换 R adon 变换
1 引 言
车牌照识别系统包括图像采集、车牌定位、字符分 割和字符识别四大部分。 图像采集一般由在公路上方 或两侧架设 CCD 摄像机实现。摄像机与汽车牌照成一 定的角度, 所以采集到的牌照图像有一定的倾斜。车牌 照倾斜有两种情况: 水平倾斜和垂直倾斜。水平倾斜指 牌照水平边框偏离水平线; 垂直倾斜指牌照垂直边框 偏离垂线。当倾斜到一定程度时, 需要对其进行校正以 提高识别率。 车牌定位是指从采集到的图像中找出包 含车牌字符的最小区域。文献[ 1 ] [ 2 ] [ 3 ]均采用检测车 牌照四条边框的方法来定位, 但在实际应用中有些车 牌左右边界有断裂如图 1, 此时容易受到伪直线目标 的干扰 (如字符“1”) ; 有些车牌左右边界缺失如图 2, 这些都将导致左右边界直线的检测失败, 这就使得在 定位时应尽量避开对左右边界的检测。
图 1 图 2 鉴于上述情况, 先对牌照粗定位, 再利用 Hough 变 换检测车牌照边框上下两直线来精确定位, 并进行水平 倾斜校正, 然后去掉牌照上下边框及左右噪声, 得到一组 倾斜的字符, 再利用 R adon 变换检测这组字符的倾斜角 度并进行垂直校正, 该方法取得了良好实验效果。
(2) Hough 变换检测上下边界并水平校正: 对粗定 位所得的车牌区域进行 Hough 变换, 求得图像中的两 条平行线, 由直线的斜率可以确定牌照的水平倾斜角 度, 并进行水平倾斜校正。
(3) R adon 变换检测字符倾斜角度并校正: R adon 变 换检测字符倾斜角度的原理是: 对一组倾斜的字符在一 定角度范围内进行投影, 计算每个角度上字符间空隙的
(x′, y′) 为 (x, y) 转过 Η角度后的坐标, f (x, y) 的 R adon
变换公式如下:
∫+ ∞
R Η(x′) = - ∞f (x′co sΗ- y′sinΗ, x′sinΗ+ y′co sΗ) dy′
其中:
x′ y′=
co sΗ sinΗ - sinΗ co sΗ =
x y
投影为 0 的个数, 个数最多的角度为字符倾斜的角度。图 4 是一组倾斜的字符, 图 5 是为该组图像的垂直投影, 由 图可见, 中间连续三个字符(8, 8 和 7) 及第六和第七个字 符 (8 和 3) 投影部分重合在一起, 造成字符的切分困难, 如果不对其进行倾斜校正, 势必影响字符的正确识别率。 用R adon 变换求得该组字符的倾斜角度为11°, 在该角度 下的投影如图 6, 由图可见每个字符的投影孤立出来, 用 R adon 变换校正后如图 7 所示。
4 字符倾斜校正方法实现
5 结束语
车牌的准确定位是直接关系到系统的识别精度, 是整个系统的关键技术。 对车牌照进行定位分割和倾 斜度校正的步骤如下:
(1) 图像预处理: 首先要把彩色图像转换为 256 级 灰度图像, 然后对灰度图像取二邻域微分, 包括横向和 垂直微分灰度图, 并对其进行二值化:
横向微分图采用公式 f ( i, j) = f ( i, j+ 1) - f ( i, j) , 利用横向微分图, 根据车牌的尺寸统计特征, 进行车牌 的粗定位。 垂直微分图采用公式 f ( i, j) = f ( i+ 1, j) - f (i, j) , 对垂直微分图进行 Hough 变换以检测车牌上下 边界直线。
Study on M ethod of Correcting L ean L icen se P la te Characters
Yang L igang1 Zhang X inghu i2 L i L anyou1
1 (C olleg e of C om p u ter T echnology , T ianj in P oly techn ic U n iv ersity , T ianj in 300160, C h ina) 2 (T ianj in U n iv ersity of T echnology and E d uca tion, T ianj in 300222, C h ina)
参考文献
1 郝永杰, 刘文耀, 路烁. 畸变汽车牌照图像的空间校正. 西 南交通大学学报, 2002, 37 (4) : 417~ 420.
2 李小平, 任江兴, 杨德刚. 车牌识别系统中若干问题的探 讨. 北京理工大学学报, 2001, 21 (1) : 116~ 119.
3 汤井田, 黄国祥, 朱德兵. 一种基于 R adon 变换的车牌图像 分割和识别方法. 中南工业大学学报, 2002, 33 (1) : 5~ 7.
图 4 倾斜字符 图 5 Η= 0°时的投影
图 3 R adon 变换
图 6 Η= 11°时的投影 图 7 校正后的字符图像
车牌照的水平倾斜角度 Α和字符的倾斜角度 Β一 般不超过一个范围, 本文在- 25°< Α< 25°和- 30°< Β < 30°范围内进行计算, 给倾角 Α和 Β取一定范围, 来 缩短 Hough 变换和 R adon 变换的计算时间。本方法在 P 667M H z 计算机上平均执行时间为 0123s。
Ξ 天津市高等学校科技发展基金项目 (0120403)
第 4 期增刊
车牌照字符倾斜校正方法的研究
697
里对点的检测问题, 通过在参数空间里进行简单的累 加统计即可完成检测任务。
3 Radon 变换
平面上的函数 f (x, y) 在任意角度 Η直线上的投影
定义为 f 沿垂直该线方向上的线积分。 如图 3 所示,
2 Hough 变换
Hough 变换的基本思想是点—线的对偶性。图像 变换前在图像空间, 变换后在参数空间。 在图像空间 XY 中的一条直线 y= p x + q ( 其中 p 为斜率, q 为截 距) 对应参数空间 PQ 中的一个点 (p , q)。因此, Hough 变换把在图像空间中的直线检测问题转换到参数空间
本文实现了一种基于 Hough 变换和 R adon 变换 的车牌照定位及倾斜校正方法。 实验证明该方法对倾 斜的字符图像有良好的校正效果, 用 Hough 变换检测 车牌上下边框的直线, 避免了检测左右两边的不准确 性; 用 R adon 变换检测倾斜字符的倾斜角度并加以校 正, 该方法也可应用于O RC 图像和二维条码图像的倾 斜校正上。