maxwell软件- 调速永磁同步电机
Ansoft软件Maxwell2D中表贴式永磁同步电机激磁方向的快速设置

Ansoft软件Maxwell2D中表贴式永磁同步电机激磁方向的快速设置作者:tobeno321引言:Maxwell作为一款电磁仿真软件,给电机设计师们带来了极大的便利,但不少新手掌握起来还存在一些问题,本人针对这些问题,相应的做出了一些教程,仅供大家学习使用。
本期我们讲解表贴式永磁同步电机激磁方向的便捷设置。
RM模块能够根据用户输入电机的参数,自动生成电机的结构,永磁体的形状以及能够满足电机仿真的其他必要条件,但由于软件的局限性,往往不能完全满足用户的需求,这时候用户会选择自己导入电机结构来满足自己的需求,在这个过程中,会遇到各种问题,这里我们针对设置永磁体激磁方向问题来进行讨论。
一.内置式(插入式)永磁电机永磁体激磁方向设置此类永磁体形状(如图1所示)为规则的正方体结构,激磁方向设置方法相对简单,操作起来很快。
图1操作步骤:1.建立相对坐标系。
首先,为了避免混淆,删除RM生成的所有相对坐标系。
如图2所示,点击,开始建立相对坐标系。
选择永磁体的一角为相对坐标系坐标原点(点1),选择永磁体实际激磁方向上的另外一点为系的终点(点2)。
这样就建立起该块永磁体的激磁方向的相对坐标系。
图22.按照同样的方法设置其他几块永磁体激磁方向的相对坐标系,这里要注意,两块相邻的永磁体激磁方向要相反。
3.全部建完后,需要对永磁体的激磁方向进行选择。
选中永磁体,打开属性对话框,在选择相对坐标系,具体如图3所示,各个永磁体按设置顺序选择12345五个相对坐标系。
图3二.表贴式永磁电机永磁体激磁方向设置(平行充磁)与内置式(插入式)永磁电机永磁体形状不同,表贴式永磁电机的永磁体的形状为弧形,不能够采用那种直接在永磁体上建立坐标系的方法,需要做出辅助线来帮助建立。
这里以一台40极48槽电机为例进行说明。
这里展示该电机的1/8模型(如图4)。
图4具体步骤如下:1.以原点为定点,沿着X轴取任意长度,画一条直线,依此直线进行下一步操作。
maxwell软件- 调速永磁同步电机
13调速永磁同步电机在用户已经掌握RMxprt 基本使用的前提下,我们将一些过程简化,以便介绍一些更高级的使用。
有关RMxprt 的详细介绍请参考第一部分的章节。
13.1基本原理调速永磁同步电机的转子转速是通过调节输入电压的频率来控制的。
与标准的直流无刷电机不同,这种电机不需要位置传感器。
永磁同步电机的转子上安装永磁体(有内转子与外转子之分),定子上嵌有多相电枢绕组,其极数与转子相同。
永磁同步电机既可用作发电机,也可用作电动机。
当电机工作在电动状态时,定子多相绕组可由正弦交流电源供电或由直流电源经DC/AC 变换来供电。
当电机工作在发电状态时,定子多相绕组为负载提供交流电源。
13.1.1 定子绕组正弦交流电源供电永磁同步电机分析方法与三相凸极同步电机相同,电机既可工作在发电状态也可工作在电动状态,通常采用频域矢量图来分析电机的特性。
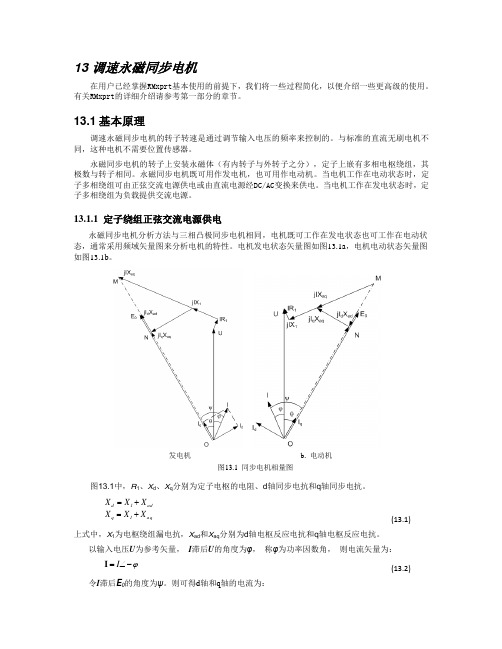
电机发电状态矢量图如图13.1a ,电机电动状态矢量图如图13.1b 。
发电机b. 电动机图13.1 同步电机相量图图13.1中,R 1、X d 、X q 分别为定子电枢的电阻、d 轴同步电抗和q 轴同步电抗。
aq1q ad 1d X X X X X X +=+=(13.1)上式中,X 1为电枢绕组漏电抗,X ad 和X aq 分别为d 轴电枢反应电抗和q 轴电枢反应电抗。
以输入电压U 为参考矢量, I 滞后U 的角度为φ, 称φ为功率因数角, 则电流矢量为:ϕ-∠=I I(13.2)令I 滞后E 0的角度为ψ。
则可得d 轴和q 轴的电流为:⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡=ψψcos sin I I I q d I (13.3)所以:qd 1I I -=tan ψ (13.4)13.1.1.1 发电机模型在图13.1a ,OM 所代表的矢量可表示为:)j j (aq 11X X R OM +++=I U (13.5)OM 所代表的矢量可用来确定E 0的位置。
令U 滞后E 0的角度为θ,对于发电机称θ为功角,则角度ψ为θϕψ+=(13.6)对于给定的功角θ,我们有;⎥⎦⎤⎢⎣⎡--=⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡-θθsin cos U U E I I X R R X 0q d q 11d (13.7)求得I d 和I q 为:⎥⎦⎤⎢⎣⎡--+-+=⎥⎦⎤⎢⎣⎡θθθθsin )cos (sin )cos (U X U E R U R U E X X X R 1I I d 0110q qd 21q d(17.8)功率角φ:θψϕ-=(13.9)输出电功率:ϕcos UI 3P 2=(13.10)输入机械功率:)(Fe Cua fw 21P P P P P +++= (13.11)式中P fw 、P Cua 、P Fe 分别为风摩损耗、电枢铜损和铁心损耗输入机械转矩:ω11P T =(13.12)ω为同步角速度rad/s13.1.1.2 电动机模型在图13.1, OM 所代表的矢量可表示为:)j j (aq 11X X R OM ++-=I U (13.5’)OM 所代表的矢量可用来确定E 0的位置。
基于Maxwell软件的车用永磁有刷直流电机效率的优化

基于Maxwell软件的车用永磁有刷直流电机效率的优化基于Maxwell软件的车用永磁有刷直流电机效率的优化摘要:车用永磁有刷直流电机是目前广泛应用于电动汽车和混合动力汽车等交通工具的关键驱动装置。
其高效率和可靠性对电动汽车的性能和续航能力起着重要作用。
本文以Maxwell软件为工具,对车用永磁有刷直流电机的效率进行优化研究,通过分析永磁有刷直流电机的原理和特性,结合Maxwell软件的建模与仿真功能,探究了提高电机效率的关键因素和优化方法。
实验结果表明,在保持电机输出功率不变的情况下,通过优化磁路设计、改进绕组结构以及合理选择电机控制策略等手段,可以显著提高车用永磁有刷直流电机的效率。
关键词:车用永磁有刷直流电机;效率优化;Maxwell软件;磁路设计;绕组结构;电机控制策略一、引言随着全球能源危机和环境污染问题的日益突出,电动汽车作为一种清洁能源驱动的交通工具,受到了越来越多的关注和重视。
而其中的关键部件之一就是车用永磁有刷直流电机,它具有高效率、低噪音、大转矩密度等优点,是目前广泛应用于电动汽车和混合动力汽车等交通工具的关键驱动装置。
在电动汽车的性能和续航能力方面,电机的效率起着至关重要的作用。
提高车用永磁有刷直流电机的效率,可以有效降低能量损耗,提高汽车的续航能力,延长电池的寿命。
因此,对车用永磁有刷直流电机的效率进行优化研究,对于电动汽车的发展具有重要意义。
二、车用永磁有刷直流电机的效率优化方法1. 优化磁路设计车用永磁有刷直流电机的效率受到磁路设计的影响。
在Maxwell软件中,可以通过建立电机的磁路模型,对磁通分布进行仿真分析。
通过调整磁路结构,优化轴向磁通密度和径向磁通密度的分布,可以减小磁通漏磁、铁心损耗和旋转风阻,提高电机的效率。
2. 改进绕组结构绕组结构是影响车用永磁有刷直流电机效率的另一个重要因素。
合理设计绕组,减小电阻和铜损耗,优化电机的电磁特性,可以提高电机的效率。
在Maxwell软件中,可以通过建立绕组模型,对电机的电磁特性进行仿真分析,找到最佳的绕组结构。
(完整word版)maxwell软件- 永磁直流电机

16 永磁直流电动机在用户已经掌握RMxprt 的基本使用的基础上,我们将一些过程简化,以便介绍一些更高级的使用。
有关RMxprt 的详细介绍请参考第一部分的章节。
16.1 基本原理对于永磁直流电动机,定子上安装了P 对永磁体磁极,N 、S 极交错排列,产生固定的定子磁场。
转子上装有分布绕组,与换向片相连,换向片随着转子一同旋转。
电刷组件与换向片始终保持接触,直流电经电刷和换向片流入旋转的电枢绕组时,电枢电流和定子磁场相互作用产生转矩。
由于换向器的机械整流作用,电枢绕组产生的转子磁场始终与定子磁场垂直。
永磁直流电动机的电压方程为:E I R U U 1b ++=(16.1)式中U b 为电刷压降,R 1电枢绕组电阻反电势方程为ωe K E =(16.2)式中K e 为反电势系数,单位是Vs/rad ,ω是转子角速度,单位是rad/s 。
当ω为常值时,电枢电流按下式确定:1e b R K U U I ω--=(16.3)由于换向器的机械整流的作用,由电枢电流产生的转子磁场始终与定子磁场垂直。
因此,在定子磁场和转子磁场的相互作用下产生了电磁转矩:I K T t m =(16.4)式中K t 是转矩系数,单位是Nm/A , 数值上与K e 相等。
输出转矩为:fwm 2T T T -= (16.5)式中的T fw 为风摩转矩。
输出机械功率为:ω22T P =(16.6)输入电功率为:Feb Cua fw 21P P P P P P ++++= (16.7)式中的P fw 、P Cua 、P b 、P Fe 分别表示风摩损耗、电枢铜损耗、电刷压降损耗和铁心损耗。
电机效率为:%100P P 12⨯=η(16.8)16.2 主要特点16.2.1支持单叠绕组和复叠绕组设计RMxprt 支持叠绕组设计,并能通过下式自动计算并联支路对数。
mp a =(16.9)式中的p 为极对数,m 为复倍系数。
16.2.2支持单波绕组和复波绕组设计RMxprt 支持波绕组设计,并能通过下式自动计算并联支路对数。
(完整)调速永磁同步电动机的电磁设计与磁场分析
调速永磁同步电动机的电磁设计与磁场分析1 引言与传统的电励磁电机相比,永磁同步电动机具有结构简单,运行稳定;功率密度大;损耗小,效率高;电机形状和尺寸灵活多变等显著优点,因此在航空航天、国防、工农业生产和日常生活等各个领域得到了越来越广泛的应用。
随着电力电子技术的迅速发展以及器件价格的不断下降,越来越多的直流电动机调速系统被由变频电源和交流电动机组成的交流调速系统所取代,变频调速永磁同步电动机也应运而生。
变频调速永磁同步电动机可分为两类,一类是反电动势波形和供电电流波形都是理想矩形波(实际为梯形波)的无刷直流电动机,另一类是两种波形都是正弦波的一般意义上的永磁同步电动机。
这类电机通常由变频器频率的逐步升高来起动,在转子上可以不用设置起动绕组。
本文使用Ansoft Maxwell 软件中的RMxprt 模块进行了一种调速永磁同步电动机的电磁设计,并对电机进行了性能和参数的计算,然后将其导入到Maxwell 2D 中建立了二维有限元仿真模型,并在此模型的基础上对电机的基本特性进行了瞬态特性分析。
2 调速永磁同步电动机的电磁设计2.1 额定数据和技术要求调速永磁同步电动机的电磁设计主要包括主要尺寸和气隙长度的确定、定子冲片设计、定子绕组的设计、永磁体的设计等.通过改变电机的各个参数来提高永磁同步电动机的效率η、功率因数cos ϕ、起动转矩st T 和最大转矩max T .本例所设计永磁同步电动机的额定数据及其性能指标如下:计算额定数据:(1) 额定相电压:N 220V U U ==(2) 额定相电流:3N N N N N1050.9A cos P I mU ηϕ⨯== (3) 同步转速:160=1000r /min f n p= (4) 额定转矩:3N N 19.5510286.5N m P T n ⨯== 2.2 主要尺寸和气隙长度的确定永磁电机的主要尺寸包括定子内径和定子铁心有效长度,它们可由如下公式估算得到:2i11P D L C n '= N N N cos E K P P ηϕ'=, 6.1p Nm dp C K K AB δα=' 式中,i1D 为定子内径,L 为定子铁心长度,P '为计算功率,C 为电机常数。
Maxwell仿真永磁同步电机步骤资料
Ansoft Maxwell 14 永磁同步电机仿真步骤总结
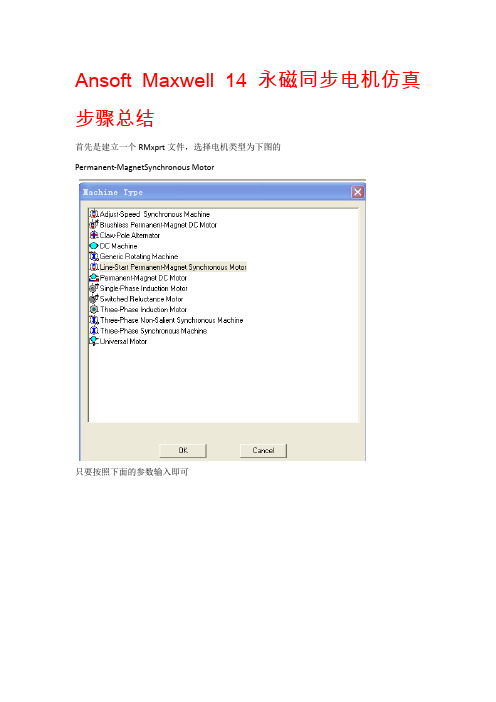
首先是建立一个RMxprt文件,选择电机类型为下图的
Permanent-MagnetSynchronous Motor
只要按照下面的参数输入即可
磁钢材料NTP264H要自己定义
Danper是怎么出来的?要右键”Rotor’ ,选择Insert Danper,就可以了
所有参数输入完毕,现在要定义个求解设置,右键“Analysis”添加一个setup,
模型
绕组的连接如下
求解结果
一键导入到maxwell14 2D瞬态场里去分析即可,右键Analysis setup 的creat Maxwell design ,auto setup 要打勾
导入模型如图,是1/4模型(导入整个模型的方法?加注fragnet 1)
因为是1/4模型,所以要设置一个Symmetry Multiplier ,右键”model”,就可以看到,设置如
下
电机在零负载转矩的起动:点击“model”的树,将其展开,双击Motion setup 作如下设置
为了得到,更好的仿真图像,设置一下仿真时间,双击Solve setup 作如下设置
以下就是在零负载转矩的情况下的得出的各种起动时间图,横轴的时间单位是毫秒(ms)
做完了以上的仿真,再做一个电机在额定负载下的起动过程,把上面的文件复制一下,然
后改一下名称,结果如图然后双击负载的那个,改一个参数就可以,要改的参数,在motion setup里(上面有提到过的)将load Torque 设置成如下就可以,然后开始让电脑开始仿真(Analys all)
结果的图如下。
同步电机永磁电机maxwell分析
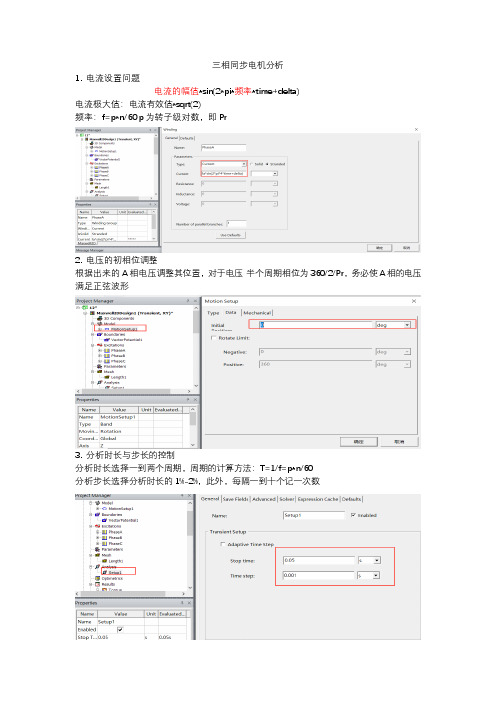
三相同步电机分析1. 电流设置问题电流的幅值*sin(2*pi*频率*time+delta)电流极大值:电流有效值*sqrt(2)频率:f=p*n/60 p为转子级对数,即Pr2. 电压的初相位调整根据出来的A相电压调整其位置,对于电压半个周期相位为360/2/Pr,务必使A相的电压满足正弦波形3. 分析时长与步长的控制分析时长选择一到两个周期,周期的计算方法:T=1/f=p*n/60分析步长选择分析时长的1%-2%,此外,每隔一到十个记一次数4. 基于坐标变换的交流磁场磁通密度的调整(-Moving1.Position -初始相位 * PI/180) * 极对数 + PI注意前面要加个负号5. 空载情况下的三个校核要点电流要为零+A相电压从零开始起步+Flux_q=0(磁通变化后)Flux-d是沿磁极正向的磁场强度,Flux-q是垂直于磁场方向的磁场强度,正常情况下,垂直于磁场方向应该为06. 删除现有的结果7. 负载要将电流初相位delta改为零,然后给电流的大小赋值8. 气隙磁密分布情况使用气隙中间的圆线作为参考面,使用场计算器计算B在中心面上的径向与切向分量在result中添加曲线可以在此处更改对应的时间9. 对气隙磁密进行傅里叶分解首先要进行坐标变化,把横坐标变成1,并且注意要用标准单位可以用鼠标划分局部显示傅里叶结果的横坐标是谐波极对数(频率),纵坐标是谐波幅值10. 网格划分问题可以通过画圆圈线手动加密气隙网格密度,画圈之后,将coverlines删除,将自动保留线画完曲线之后再画网格,并通过plotmesh查看11. 矢量场向量曲面积分计算问题在指定的曲线上,当需要插入函数的时候,先将变量以及加减乘除运算符先加上,然后使用积分函数integ 函数,需要注意的是,此处为矢量的线积分,要注意公式的转换·1,一般,极坐标积分可以提出一个r 出来,即:()r f d θθ∫在线积分时就变成了:()l f d θ∫。
Maxwell仿真永磁同步电机步骤

Ansoft Maxwell 14 永磁同步电机仿真步骤总结
首先是建立一个RMxprt文件,选择电机类型为下图的
Permanent-MagnetSynchronous Motor
只要按照下面的参数输入即可
磁钢材料NTP264H要自己定义
Danper是怎么出来的?要右键”Rotor’ ,选择 Insert Danper,就可以了
所有参数输入完毕,现在要定义个求解设置,右键“Analysis”添加一个setup,
模型
绕组的连接如下
求解结果
一键导入到maxwell14 2D瞬态场里去分析即可,右键Analysis setup 的creat Maxwell design ,auto setup 要打勾
导入模型如图,是1/4模型(导入整个模型的方法?加注fragnet 1)
因为是1/4模型,所以要设置一个 Symmetry Multiplier ,右键”model”,就可以看到,
设置如下
电机在零负载转矩的起动:点击“model”的树,将其展开,双击Motion setup 作如下设置
为了得到,更好的仿真图像,设置一下仿真时间,双击Solve setup 作如下设置
以下就是在零负载转矩的情况下的得出的各种起动时间图,横轴的时间单位是毫秒(ms)
做完了以上的仿真,再做一个电机在额定负载下的起动过程,把上面的文件复制一下,然
后改一下名称,结果如图然后双击负载的那个,改一个参数就可以,要改的参数,在motion setup里(上面有提到过的)将load Torque 设置成如下就可以,然后开始让电脑开始仿真(Analys all)
结果的图如下。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
13调速永磁同步电机在用户已经掌握RMxprt 基本使用的前提下,我们将一些过程简化,以便介绍一些更高级的使用。
有关RMxprt 的详细介绍请参考第一部分的章节。
13.1基本原理调速永磁同步电机的转子转速是通过调节输入电压的频率来控制的。
与标准的直流无刷电机不同,这种电机不需要位置传感器。
永磁同步电机的转子上安装永磁体(有内转子与外转子之分),定子上嵌有多相电枢绕组,其极数与转子相同。
永磁同步电机既可用作发电机,也可用作电动机。
当电机工作在电动状态时,定子多相绕组可由正弦交流电源供电或由直流电源经DC/AC 变换来供电。
当电机工作在发电状态时,定子多相绕组为负载提供交流电源。
13.1.1 定子绕组正弦交流电源供电永磁同步电机分析方法与三相凸极同步电机相同,电机既可工作在发电状态也可工作在电动状态,通常采用频域矢量图来分析电机的特性。
电机发电状态矢量图如图13.1a ,电机电动状态矢量图如图13.1b 。
发电机b. 电动机图13.1 同步电机相量图图13.1中,R 1、X d 、X q 分别为定子电枢的电阻、d 轴同步电抗和q 轴同步电抗。
aq1q ad 1d X X X X X X +=+=(13.1)上式中,X 1为电枢绕组漏电抗,X ad 和X aq 分别为d 轴电枢反应电抗和q 轴电枢反应电抗。
以输入电压U 为参考矢量, I 滞后U 的角度为φ, 称φ为功率因数角, 则电流矢量为:ϕ-∠=I I(13.2)令I 滞后E 0的角度为ψ。
则可得d 轴和q 轴的电流为:⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡=ψψcos sin I I I q d I (13.3)所以:qd 1I I -=tan ψ (13.4)13.1.1.1 发电机模型在图13.1a ,OM 所代表的矢量可表示为:)j j (aq 11X X R OM +++=I U (13.5)OM 所代表的矢量可用来确定E 0的位置。
令U 滞后E 0的角度为θ,对于发电机称θ为功角,则角度ψ为θϕψ+=(13.6)对于给定的功角θ,我们有;⎥⎦⎤⎢⎣⎡--=⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡-θθsin cos U U E I I X R R X 0q d q 11d (13.7)求得I d 和I q 为:⎥⎦⎤⎢⎣⎡--+-+=⎥⎦⎤⎢⎣⎡θθθθsin )cos (sin )cos (U X U E R U R U E X X X R 1I I d 0110q qd 21q d(17.8)功率角φ:θψϕ-=(13.9)输出电功率:ϕcos UI 3P 2=(13.10)输入机械功率:)(Fe Cua fw 21P P P P P +++= (13.11)式中P fw 、P Cua 、P Fe 分别为风摩损耗、电枢铜损和铁心损耗输入机械转矩:ω11P T =(13.12)ω为同步角速度rad/s13.1.1.2 电动机模型在图13.1, OM 所代表的矢量可表示为:)j j (aq 11X X R OM ++-=I U (13.5’)OM 所代表的矢量可用来确定E 0的位置。
令E 0滞后U 的角度为θ,对于电动机称θ为转矩角,则角度ψ为θϕψ-=(13.6’)对于给定的转矩角θ, 我们有;⎥⎦⎤⎢⎣⎡--=⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡-θθsin cos U E U I I X R R X 0q d q 11d (13.7’)求得I d 和I q 为:⎥⎦⎤⎢⎣⎡--+-+=⎥⎦⎤⎢⎣⎡θθθθsin )cos (sin )cos (U X E U R U R E U X X X R 1I I d 0110q qd 21q d(13.8’)功率因数角φ:θψϕ+=(13.9’)输入电功率:ϕcos UI 3P 1=(13.10’)输出机械功率:)(Fe Cua fw 12P P P P P ++-= (13.11’)式中P fw 、P Cua 、P Fe 分别为风摩损耗、电枢铜损和铁心损耗输出机械转矩: ω22P T =(13.12’)ω为同步角速度rad/s电机效率:%100P P 12⨯=η(13.13’)13.1.2 定子绕组由DC/AC 逆变器供电这种情况下,调速永磁同步电机工作在电动机状态,其分析方法与直流无刷电动机相似。
为了在气隙中产生旋转磁场,定子多相绕组被联结在DC/AC 逆变器上。
调速永磁同步电机与直流无刷电动机的主要区别如下:在无刷永磁直流电动机中, 触发时间完全由转子位置决定,但是在永磁同步电机中,触发时间完全与转子位置无关。
对于无刷永磁直流电动机,如果机械负载增加,则转速和感应电压下降,引起电枢电流和转矩的增加以平衡增加的机械负载。
然而,对于调速永磁同步电机, 如果机械负载增加, 则转速短时下降,这将引起转矩角(等同与无刷永磁直流电动机中的触发导通角)增加,从而使转矩增加来保持转速不变。
因此,无刷永磁直流电动机的转速随输入电压和机械负载变化,而永磁同步电机的转速则不是这样。
调速永磁同步电机的转速可以通过改变控制信号的频率来实现,这就是我们称其为调速永磁同步电机的原因。
采用时域数学模型来分析电机的特性。
派克电压方程如下:⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡++-+=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡0q d 01q 1e d e q d 10q d 0q d i i i L R 000L R L 0L L R e e e u u u p p pωω (13.14)其中R 1电枢绕组电阻,L d ,、L q 和L 0分别是d 轴,q 轴和0轴电感,ωe 是电角速度,其单位为rad/s ,微分算子是t d d p =(13.15)端电压、感应电势、电枢绕组电流的坐标变换方程如下:⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡0q d b a b a T 0q d b a T 0q d i i i i i e e e e e u u u u u C C C :,:,: (13.16)两相,三相和四相的变换矩阵C 2,C 3和C 4分别为⎥⎦⎤⎢⎣⎡=002θθθθcos sin sin cos C(13.17a)⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎣⎡----=21222121323)sin()cos()sin()cos(sin cos αθαθαθαθθθC (13.17b)⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡----=00004θθθθθθθθcos sin sin cos cos sin sin cos C(13.17c)其中:πα32= (13.18)输入电功率功率:⎰++=T00q q d d 1ti u i u i u T 1P 0d )( (13.10″)输出机械功率:)(t Fe Cua fw 12P P P P P P +++-= (13.11″)式中P fw 、P Cua 、P Fe 和P t 分别为风摩损耗、电枢铜损、铁心损耗和开关损耗。
输出机械转矩和效率可由公式(13.12)和(13.13)计算得到。
13.2 主要特点13.2.1 对同步电动机和同步发电机均适用永磁同步电动机和永磁同步发电机结构基本相同,但相量关系和计算方法有些差别,输出性能数据也有所不同,这些将在设计中详细说明。
13.2.2 适用于内转子结构和外转子结构永磁同步电机的永久磁钢安装在转子上,内转子为常见结构。
当用于车辆驱动时,则多为外转子结构。
RMxprt 能适用于这两类转子结构的永磁同步电机设计。
13.2.3 五种常用的转子结构适用于五种常用的转子结构。
13.2.4 适用于六种绕组连接和开关电路的组合永磁同步电机的定子为多相绕组,最常用的是两相、三相和四相。
绕组联结有Y、X、△、◇等多种方式。
开关电路一般为桥式或星形。
RMxprt 可对六种最常用的绕组和开关电路组合进行设计。
13.2.5 适用于常见的三种外接电源对于永磁同步电动机常用的三种开关电源类型(DC、PWM、Sine Wave),RMxprt 都予以支持。
13.2.6线圈和绕组的排布优化设计当设计者采用全极式单层绕组时,RMxprt将自动对绕组按链式或交叉式进行排布,以减少绕组端部长度13.2.7支持任何单、双层绕组设计的绕组编辑器对于具有交流多相绕组的电机,除常用的链式、叠式、同心式和交叉式单、双层绕组外,RMxprt 提供一种非常灵活的绕组编辑器,使用户可以根据自己的需要,设计出各种特殊绕组。
如单双层混合式绕组、大小相带变极多速绕组、三相正弦绕组等。
在绕组编辑器中,通过改变每个线圈的相属、匝数、入边槽号和出边槽号,可排布出任意所需的单、双层绕组分布形式。
13.2.8 分析气隙磁场分布对于均匀气隙和非均匀气隙(磁极偏心),都能通过许克变换求解气隙磁场的分布。
13.3 设计调速永磁同步电机这一节, 我们将演示永磁同步电机设计的一般流程。
点击Start>Programs>Ansoft>Maxwell 12>Maxwell 12从桌面进入Maxwell界面。
从RMxprt主菜单条中点击File>New新建一个空白的Maxwell工程文件Project1。
从RMxprt主菜单栏中点击Project>Insert RMxprt Design。
在Select Machine Type 会话框中选择Adjust-Speed Synchronous Machine,然后点击OK返回RMxprt主窗口。
这样就添加一个新的RMxprt设计。
从RMxprt菜单栏中点击File>Save。
如果想把项目另存为PMSG_4p50Hz550W.mxwl,可从下拉菜单选择Save As然后点击Save返回RMxprt 主窗口。
(参见3.2.6设置默认的项目路径)分析这个算例,需要做以下几项设置:1. 设置模型单位(参考章节2.3.2.7设置模型单位):2. 配置RMxprt 材料库(参考章节3.4.1配置材料库):3. 编辑线规库(参考章节3.3.2 到3.3.6):当选择Adjust-Speed Synchronous Machine做为电机模型时,必须输入如下几项:1. General data. (基本性能数据)2. Stator data. (定子数据)3. Rotor data. (转子数据)4. Solution data. (解算数据)13.3.1 主要性能数据在项目树中双击Machine图标,显示Properties对话框,如图13.2。
图13.2主要性能数据1. Machine Type:调速永磁同步电机.2. Number of Poles:极数3. Rotor Position:转子位置。