永磁同步电动机调速控制系统仿真研究
永磁同步电动机运动系统控制方案研究
。 d d i 以 通 过 对 i、 、 可 ^i i B c的 嵌 入 式 转 子 则 是 将 永 磁 铁 嵌 入 在 转 子 轴 的 内 部 , 图 1( ) 因 此 定 子 电 流 矢 量 i在 O q坐 标 系 上 的 投 影 i、 如 b,
流量 。
lre变 换 ( 1 3 2变 换 ) P r 和 ak变 换 ( / 变 换 ) 得 , 此 i i是 直 交 直 求 因 d 、 交 轴 的 电 感 大 于 直 轴 的 电 感 。并 且 , 了 电 磁 转 矩 外 , 有 磁 阻 转 矩 C ak 除 还
布 ; 子 电 枢 绕 组 采 用 短 距 分 布 式 绕 组 , 最 大 限 度 地 消 除 谐 波 磁 活 有 效 地 利 用 这 个 磁 阻 转 矩 , 过 调 整 和 控 制 B 角 , 最 小 的 电 流 定 能 通 用 动势 。 永 磁 体 转 子 产 生 恒 定 的 电 磁 场 。 当 定 子 通 以 三 相 对 称 的 正 弦
p — 转 子 的磁 极 对数 ; — k 、 — — 永 磁 同 步 电 动 机 d、 q轴 的 主 电 感 。
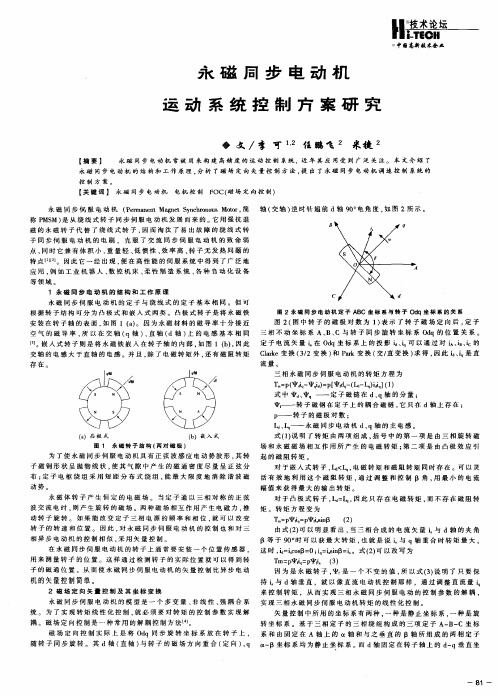
() 凸 极 式 a () 嵌 入 式 b
式 ( ) 明 了 转 矩 由 两 项 组 成 , 号 中 的 第 一 项 是 由 三 相 旋 转 磁 1说 括
场 和永 磁 磁 场 相互 作 用 所 产生 的 电磁 转矩 ; 二 项 是 由 凸极 效 应 引 第 为 了 使 永 磁 同 步 伺 服 电 动 机 具 有 正 弦 波 感 应 电 动 势 波 形 , 转 起 的 磁 阻 转 矩 其 子 磁 钢 形 状 里 抛 物 线 状 , 其 气 隙 中 产 生 的 磁 通 密 度 尽 量 呈 正 弦 分 使 对 于 嵌 入 式 转 子 , k , 磁 转 矩 和 磁 阻 转 矩 同 时 存 在 。可 以 灵 k< 电
基于matlab的永磁同步电机调速系统的仿真
摘要本文首先介绍了永磁同步电机的国内外发展状况,然后介绍了永磁同步电机的结构及原理,接着建立了永磁同步电机的数学模型,并在此基础上用MATLAB 进行了仿真,最后进行了仿真及仿真结果的分析。
永磁同步电机是具有非线性、强耦合性、时变性的系统,在运行过程中会受到负载扰动等多因素影响。
以往研究永磁同步电机的做法是在硬件上搭建一个平台进行模拟,但是这样在做实验中难免会造成一些损失,而且硬件上的反馈会比较长研究周期长。
目前在国内外关于永磁同步电机调速系统的研究现状上来讲,基于MATLAB环境下仿真模型的构建下进行研究,这可极大的缩短研究周期和研究成本。
在利用MATLAB仿真模型研究永磁同步电机时,我们可以把那些扰动因数做成模拟信号给予模型,这样可以准确的定性分析实验得出结论。
关键字:永磁同步电机,空间矢量调制,MATLAB仿真,数学模型。
ABSTRACTIn the first, this paper introduces the domestic and international development status of Permanent Magnet Synchronous Motor(PMSM), gives a explanation about its basictheory, structure. Then it builds a mathematical model, and uses MATLAB to simulate that model.The PMSM is a nonlinear, strong-coupling and time-varying system, so in the operation process, it will be influenced by many factors such asload disturbance. Therere, it is necessary to take action when researching the control method of PMSM. The former research method is setting up a platform on hardware to perform experimensbut it is undesirable, because it often cause some loss, and the feedback cycle is longer than research cycle. As fordomestic and international current situation on the research of PMSM, it is obvious that researching under the simulation model created by MATLAB could greatly reduce the cost and cycle of researchment. When using MATLAB to build simulation model on the research of PMSM, we can transform these disturbance factors into analog signal, making a qualitative analysis to draw conclusions from them.Keywords:PMSM, SVPWM, MATLAB simulation, mathmatical model目录摘要 (I)ABSTRACT .............................................. I I 目录............................................... I II 第一章绪论 (1)1.1 研究背景及意义 (1)1.1.1 研究背景 (1)1.1.2 研究的目的及意义 (1)1.2 国内外研究现状 (2)1.2.1 国内研究历史及现状 (2)1.2.2 国外研究现状及趋势 (2)1.3 本文的主要内容 (3)第二章永磁同步电机调速系统的结构和数学模型 (5)2.1 引言 (5)2.2 永磁同步电机调速系统的结构 (5)2.3 永磁同步电机调速系统的数学模型 (6)2.3.1 PMSM在ABC坐标系下的磁链和电压方程 (6)坐标系下的磁链和电压方程 (8)2.3.2 PMSM在02.3.3 PMSM在dq0坐标系下的磁链和电压方程 (9)2.4 永磁同步电机的控制策略 (11)2.5 本章小节 (12)第三章永磁同步电机矢量控制及空间矢量脉宽调制 (14)3.1 引言 (14)3.2 永磁同步电动机的矢量控制 (14)3.3 空间矢量脉宽调制概念 (15)3.4 SVPWM模块的建立 (17)3.5 本章小结 (23)第四章基于Matlab的永磁同步调速系统仿真模型的建立 (24)4.1 引言 (24)4.2 MATLAB软件的介绍 (24)4.3永磁同步电机调速系统整体模型的建立 (25)4.4仿真参数调试及结果分析 (28)4.5本章小结 (29)第五章总结与展望 (30)5.1全文总结 (30)参考文献 (31)致谢 (33)第一章绪论1.1 研究背景及意义1.1.1 研究背景随着电力电子技术、微电子技术和现代电机控制理论的发展,交流调速系统逐步具备了宽调速范围、高稳速精度、快速动态响应及四象限运行等良好的技术性能,交流调速系统应用越来越广泛。
永磁同步电动机矢量控制调速系统研究
、
一
置 ,带有绝 对信 息功 能 ,3路 彼 此相 差 10 ,占空 2。 比为 05 .。另 一组 完全 同增量 式光 电编码 器 ,输 出 3
\
|/ //
4
路方波脉冲 A 、B和 z 、B两路脉冲相位差 9。 。A o, 可以用来判断转 向,z脉冲每转一个 ,用于基准点 定位 ,u 、w 信号用于伺服系统转子磁极的初始 、V 定位。在应用中应该保证复合式光电编码器 的极对 数与电机的极对数一致。转子旋转一周 ,编码器 u 、 V 、w 三相中任一相就发出与极对数相同的脉冲个 数。根据 u 、w 相电平高低 的组合就可知转子 、V 的区间范 围。同时根据 u 、w 的 3位信号,可 、V 以将转子的位置确定在6 。 o 电角度的范围里,故由此 可以得出 U、V、w 与转 子 角 位 置 关 系见 表 1 。当 U、V、w 读数在 10时 ,可 以取其 角度 为 0 到 6 。 0 。 o
M a n tS n h o o sM o o g e y c r n u t r
CHEN s n A—a
( ig oY nhn eerhIstt o g e h o g ,Nn b 0 0,C ia N nb u se gR sac ntue f hT c nl y ig o3 5 4 i Hi o 1 hn )
,
/ / 2 9 5 -
2 一
克拉 克 ( L R E) 变换 C A K 反
制框图。该系统可以工作于速度给定和位置给定模式
下 ,并且 P 调制方法采用空 间矢量调制法 。 WM
收 稿 日期 :20 -53 0 60 -0
维普资讯
ne tma n ts n h o o s moo r ic s e n g e y c r n u t ra e d s u s d.
永磁同步电机系统仿真(毕业论文doc)

第 1 章绪论1.1 课题研究的背景1.1.1 永磁同步电机的发展状况永磁同步电机出现于20 世纪50 年代。
其运行原理与普通电激磁同步电机相同,但它以永磁体替代激磁绕组,使电机结构更为简单,提高了电机运行的可靠性。
随着电力电子技术和微型计算机的发展,20 世纪70 年代,永磁同步电机开始应用于交流变频调速系统。
20 世纪80 年代,稀土永磁材料的研制取得了突破性的进展,特别是剩磁高、矫顽力大而价格低廉的第三代新型永磁材料钕铁硼NdFeB的出现,极大地促进了永磁同步电机调速系统的发展。
尤其值得一提的是我国是一个稀土材料的大国,稀土储量和稀土金属的提炼都居世界首位。
随着稀土材料技术的不断发展,永磁材料的磁能积已经做的很高,价格也早就满足工业应用的需要,加上矢量控制水平的不断提高,永磁同步电动机越来越显出效率高、功率密度大、调速范围宽、脉动转矩小等高性能的优势。
使我国在稀土永磁材料和稀土永磁电机的科研水平都达到了国际先进水平。
新型永磁材料在电机上的应用,不仅促进了电机结构、设计方法、制造工艺等方面的改革,而且使永磁同步电机的性能有了质的飞跃,稀土永磁同步电机正向大功率超高速、大转矩微型化、智能化、高性能化的方向发展,成为交流调速领域的一个重要分支12。
由于受到功率开关元件、永磁材料和驱动控制技术发展水平的制约,永磁同步电机最初都采用矩形波波形,在原理和控制方式上基本上与直流电机类似,但这种电机的转矩存在较大的波动。
为了克服这一缺点,人们在此基础上又研制出带有位置传感器、逆变器驱动的正弦波永磁同步电机,这就使得永磁同步电机有了更广阔的前景。
1.1.2 永磁同步电机控制系统的发展随着永磁同步电动机的控制技术的不断发展,各种控制技术的应用也在逐步成熟,比如SVPWM、DTC、SVM-DTC、MRAS 等方法都在实际中得到应用。
然而,在实际应用中,各种控制策略都存在着一定的不足,如低速特性不够理想,过分依赖于电机的参数等等,因此,对控制策略中存在的问题进行研究就有着十分重大的意义。
基于MATLAB永磁同步电动机矢量控制系统的仿真研究

基于MATLAB永磁同步电动机矢量控制系统的仿真研究永磁同步电动机(Permanent Magnet Synchronous Motor,PMSM)是一种应用广泛的高性能电机。
在工业领域,PMSM通常采用矢量控制方法来实现精确的速度和位置控制。
本文基于MATLAB对PMSM矢量控制系统进行仿真研究,探讨其工作原理及性能。
首先,PMSM的矢量控制系统由控制器、电机和传感器三部分组成。
其中,控制器根据电机的反馈信号和期望输出来计算电机的控制信号。
传感器用于测量电机的转速、位置和电流等参数,反馈给控制器。
通过调节控制信号,控制器可以实现电机的速度和位置控制。
在PMSM的矢量控制系统中,通常采用dq轴矢量控制方法,将三相电流转换为直流参考轴和旋转参考轴的dq坐标系,进而对电机进行控制。
其次,本文利用MATLAB软件对PMSM矢量控制系统进行了仿真实验。
首先,建立了PMSM电机的数学模型,包括电机的动态方程、反电动势方程和电流方程。
然后,在MATLAB环境中编写程序,实现电机模型的数值求解和控制算法的计算。
通过调节控制参数,可以对电机的速度和位置进行精确控制,并实时监测电机的工作状态。
在仿真实验中,通过改变电机的负载情况、工作电压和控制参数等条件,分析了PMSM矢量控制系统的性能。
实验结果表明,当负载增加时,电机的转动惯量增大,控制系统的响应时间变长,但依然可以实现精确的速度和位置控制。
当电机的工作电压增加时,电机的输出功率和转速增大,但也会产生更大的电流和损耗。
当控制参数的比例增益和积分时间常数变化时,系统的稳定性和动态性能均会受到影响,需要进行合理的调节。
总结起来,本文基于MATLAB对PMSM矢量控制系统进行了仿真研究,探讨了其控制原理和性能。
通过仿真实验,可以深入理解PMSM矢量控制系统的工作原理,优化系统的参数和性能,并为实际应用提供参考。
现代永磁同步电机控制原理及matlab仿真

现代永磁同步电机控制原理及matlab仿真1.控制原理位置控制:通过测量电机转子位置,采用位置传感器的信息反馈,使得电机的转子角度与目标角度保持一致。
位置控制主要包括两个环节:定子电流控制和电流矢量控制。
定子电流控制根据给定的目标角度计算出合适的电机定子电流矢量,以产生所需的电磁磁势,从而实现转子位置的控制。
转速控制:转速控制是为了使得电机的转速与给定的目标转速保持一致。
转速控制主要包括两个环节:PI调节器和电流矢量控制。
PI调节器根据转速误差计算出合适的电机定子电流矢量值,然后通过电流矢量控制将该矢量投射到静止转子坐标系中,从而实现转速的控制。
控制方法有三种:电流注入法、无转子定位法和定子电流控制法。
其中,定子电流控制法是最常用的控制方法。
该方法通过测量电机的电流和电机转子位置,计算出所需的定子电流矢量,并将其转换为电压值施加到电机的定子绕组上,实现对电机的控制。
2.MATLAB仿真MATLAB是一款常用的工程软件,其仿真功能强大且易于使用,适合用于现代永磁同步电机的控制仿真。
首先,在MATLAB中建立永磁同步电机的模型,包括电机的电路模型和机械模型。
然后,根据需要选择仿真方法,比如欧拉法或龙格库塔法,以及仿真的时间步长。
设置好参数后,就可以进行仿真实验了。
对于位置控制的仿真,可以设置一个给定的目标角度,并根据电机模型和控制原理计算出相应的定子电流,将其作用于电机的定子绕组中,并观察电机转子角度是否能够与给定的角度保持一致。
对于转速控制的仿真,可以设置一个给定的目标转速,并根据电机模型和控制原理计算出相应的定子电流,将其作用于电机的定子绕组中,并观察电机转速是否能够与给定的转速保持一致。
通过进行多次仿真实验,可以调整控制参数,优化控制算法,以获得更好的控制效果。
总结现代永磁同步电机的控制原理主要包括位置控制和转速控制两个方面,其中定子电流控制是最常用的控制方法。
使用MATLAB进行仿真可以有效地验证控制算法的性能,并进行参数调整和优化。
永磁同步电机控制方法建模与仿真研究
永磁同步电机控制方法建模与仿真研究1. 本文概述本文旨在探讨永磁同步电机(Permanent Magnet Synchronous Motor, PMSM)的控制方法建模与仿真研究。
永磁同步电机作为现代电力驱动系统中的重要组成部分,其性能优越、控制精度高等特点使得它在电动汽车、风力发电、工业机器人等领域得到广泛应用。
随着科学技术的不断进步,对永磁同步电机的控制方法提出了更高的要求,对其进行深入研究和优化具有重要意义。
本文首先介绍了永磁同步电机的基本原理和结构特点,为后续的控制方法建模提供理论基础。
接着,文章重点阐述了永磁同步电机的控制方法,包括矢量控制、直接转矩控制等,并分析了各种控制方法的优缺点。
在此基础上,文章提出了一种基于模型预测控制的永磁同步电机控制策略,并通过仿真实验验证了该控制策略的有效性和优越性。
为了更好地理解和分析永磁同步电机的动态性能和控制效果,本文建立了永磁同步电机的数学模型,并利用MATLABSimulink等仿真工具进行了仿真研究。
仿真结果展示了不同控制方法下永磁同步电机的运行状态和性能表现,为实际工程应用提供了有益的参考。
本文通过对永磁同步电机的控制方法建模与仿真研究,深入探讨了永磁同步电机的控制策略和优化方法,为永磁同步电机的进一步应用和发展提供了理论支持和技术指导。
2. 永磁同步电机基本原理永磁同步电机(PMSM)是一种高效、高性能的电机,广泛应用于各种工业控制系统和电动汽车等领域。
其基本原理基于电机内部磁场与电流之间的相互作用,通过控制电机定子电流来实现对电机转速和转矩的精确控制。
PMSM的核心组成部分包括定子、转子和永磁体。
定子通常由多个线圈组成,这些线圈在通电时产生磁场。
转子则装配有永磁体,这些永磁体产生恒定的磁场。
当定子通电产生的磁场与转子永磁体磁场相互作用时,会产生转矩,进而驱动转子旋转。
PMSM的一个重要特性是其同步性,即电机转速与电源频率之间保持严格的同步关系。
永磁同步电动机调速控制系统的设计和研究的开题报告

永磁同步电动机调速控制系统的设计和研究的开题报告
一、选题背景与意义
随着现代智能制造技术的不断进步,电动机已成为广泛应用于工业生产领域的重要设备。
其中,永磁同步电动机凭借其高效、精度高、动态响应快等优势,已逐渐成为电力驱动系统中的重要位置,因此对其调速控制系统进行深入研究,对于提高永磁同步电动机的应用水平,具有十分重要的意义。
二、研究内容和方法
本课题的研究内容主要是永磁同步电动机调速控制系统的设计与研究。
首先,需要对永磁同步电动机的电气特性进行深入分析,并选择合适的控制算法,以实现永磁同步电动机的高效、快速、准确的调速控制。
其次,需要设计电源模块、控制模块及驱动模块,搭建出具有良好性能的永磁同步电动机调速控制系统。
最后,需要通过各种测试和实验验证调速控制系统的性能及可靠性等方面,确保其具有良好的工程应用价值。
三、预期目标及意义
本课题旨在实现永磁同步电动机调速控制系统的设计及研究,重点探究永磁同步电动机的永磁实现方式、调速控制及应用等方面,提高永磁同步电动机的运行效率和系统稳定性。
通过本课题的研究,可为工业自动化及动力系统领域的发展与应用提供依据,具有很强的理论及实践应用性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
111111111 0 前言永磁同步电机调速技术的发展得于微电子技术、电力电子技术、传感器技术、永磁材料技术、自动控制技术、微机应用技术的最新发展成就。
电动机的驱动部分所采用的功率器件经历了几次的更新换代以后,速度更快、控制更容易的全控型功率器件MOSFET和IGBT逐渐成为主流。
脉宽调制方法(PWM和SPWM)、变频技术在直流调速和交流调速系统中得到了广泛应用。
永磁同步电动机调速系统是一个多变量、强耦合的复杂系统,其动态特性极其复杂,它是由一组高阶的非线性微分方程决定的,由于控制系统控制方式的复杂性,使动态特性的变化十分繁琐。
所以,对调速系统特性的分析研究,最好好在着手实际系统之前,先利用计算机仿真,由仿真的各方面结果给实际系统的设计、调试等方面提供借鉴和参考。
利用仿真实验对永磁同步电动机调速系统进行研究,从而为实际系统的设计提供可靠的参数。
本文在仿真过程中,采用MATLAB/SIMULINK软件。
1 永磁同步电动机的数学模型1.1 永磁同步电动机的结构和工作原理永磁同步电动机本体是由定子和转子两大部分组成。
永磁同步电动机的定子指的是电动机在运行时的不动部分,主要是由硅钢冲片、三相对称同分布在它们槽中的绕组、固定铁心用的机壳以及端盖等部分组成。
其定子和异步电动机的定子结构基本相同。
空间上三相对称绕组通入时间上对称的三相电流就会产生一个空间旋转磁场,旋转磁场的同步转速0n 为060fn p,f 为定子电流频率,p 为电动机极对数。
永磁同步电动机的转子是指电动机在运行时可以转动的部分,通常由磁极铁心、永磁磁钢及磁辘等部分组成.永磁体转子产生恒定的电磁场。
当定子通以三相对称的正弦波交流电时,则产生旋转的磁场。
两种磁场相互作用产生电磁力,推动转子旋转。
如果能改变定子三相电源的频率和相位,就可以改变转子的转速和位置。
永磁同步电动机的定子与绕线式的定子基本相同。
但可根据转子结构可分为凸极式和嵌入式两类。
凸极式转子是将永磁铁安装在转子轴的表面,如图1(a )。
因为永磁材料的磁导率十分接近空气的磁导率,所以在交轴(q 轴)、直轴(d 轴)上的电感基本相同。
嵌入式转子则是将永磁铁嵌入在转子轴的内部,如图2-1(b ),因此交轴的电感大于直轴的电感。
并且,除了电磁转矩外,还有磁阻转矩存在。
图2-1 永磁转子结构(两对磁极) Fig.2-1 Permanent magnetism rotor structure为了使永磁同步电动机具有正弦波感应电动势波形,其转子磁钢形状呈抛物线状,使其气隙中产生的磁通密度尽量呈正弦分布;定子电枢绕组采用短距分布式绕组,能最大限度地消除谐波磁动势。
111111111永磁体转子产生恒定的电磁场。
当定子通以三相对称的正弦波交流电时,则产生旋转的磁场。
两种磁场相互作用产生电磁力,推动转子旋转。
如果能改变定子三相电源的频率和相位,就可以改变转子的转速和位置。
因此,对永磁同步电动机的控制也和对三相异步电动机的控制相似,采用矢量控制。
在永磁同步电动机的转子上通常要安装一个位置传感器,用来测量转子的位置。
这样通过检测转子的实际位置就可以得到转子的磁通位置。
从而使永磁同步电动机的矢量控制比异步电动机的矢量控制简单。
1.2 永磁同步电动机的数学模型PMSM 的永磁体和绕组,绕组和绕组之间的相互影响,电磁关系十分复杂,再加上磁路饱和等非线性因素,建立精确的数学模型是很困难的。
为了简化PMSM 的数学模型,我们通常作如下的假设:1)不计磁饱和、磁滞、剩磁、涡流等效应的影响;2)定子绕组电流在气隙中只产生正弦分布的磁势,不记磁势的高次谐波,定子三相绕组完全对称,在空间互成120︒电角度;3)电机定子空载电势是正弦波,即定、转子间互感系数是转子位置角的正弦(或余弦)函数;4)实际电机的多导条阻尼绕组可等效为两个独立的等效阻尼绕组,分别在直轴、交轴方向上各自短路。
满足以上条件的电机称为理想电机。
由于矢量控制系统对被控对象参数变化有一定的适应能力,根据以上假设得到的数学模型可以用来进行矢量控制系统的分析和综合。
对于一般的同步电机,定子ABC 相绕组、励磁绕组f 、以及阻尼绕组d 、q 的电压方程如式(1-1):式中R 、f R 、d R 、q R 为各组绕组电阻,A ψ、B ψ、C ψ、f ψ、d ψ、q ψ为各绕组磁链,它们由A i 、B i 、C i 、f i 、d i 、q i 六个电流共同产生,A u 、B u、C u 为三相绕组电压,f u 为励磁直流电压,阻尼绕组在直轴和交轴上各自短路。
对于A 、B 、C 、f 、d 、q 六个绕组,又可写出六个磁链方程式如式(1-2):00CABA AB BC C fq d f fd dq qd d d u Ri u Ri u Ri dtdt dtd d d u Ri R i R i dtdtdtψψψψψψ=+=+=+=+=+=+ (1-1)000A AA ABAC Af Ad Aq A B BA BB BC Bf Bd Bq B C CACB CC Cf Cd Cq C f fA fB fC ff fD f d dA dB dC df dd d q qAqBqCqq q L M M M M M i M L M M M M i M M L M M M i M M M L M i M M M M L i M M M L i ψψψψψψ⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦(1-2)式中AAL 、BBL 、CCL 、ffL 、ddL 、qqL 为各绕组自感系数,XYM 为绕组X 与绕组Y 之间的互感系数。
对于永磁同步电动机,它有自身的特殊性:不用励磁绕组励磁,而由永磁体充当励磁源。
为了推导方便,我们虚拟认为有励磁绕组励磁,其励磁电流仍用fi 表示,它与每相绕组相链的最大磁链是个常数。
同时再进一步假设PMSM 不带阻尼绕组,或者说忽略阻尼绕组的影响,则PMSM 的ABC 坐标系的数学模型可由式(1-1)得:CABA AB BC C d d d u Ri u Ri u Ri dtdtdtψψψ=+=+=+ (1-3)由式(1-2)又得A AA AB AC A Af B BA BB BC B Bf fC CACBCC C Cf L M M i M M L M i M i MM L i M ψψψ⎡⎤⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥=+⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦⎣⎦ (1-4)如果三相定子绕组对称,在空间互成120︒夹角,则AA BB CCL L LL===,AB BC CABA CB AC M M MM M M M======,再由A B C i i i ++=,以及假定转子在三相定子中所产生的反电动势为,,A B CE E E ,于是由式(1-4)可得:00000A A AB B BC C C L Mi E L M i E L M i E ψψψ-⎡⎤⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥=-+⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦⎣⎦⎣⎦ (1-5) 式中:L 为定子各相自感,11m L L L σ=+;1m L 为与定子一相绕组交链的最大互感磁通所对应的定子互感;1L σ为定子漏感。
111111111将式(1-5)代入式(1-3)得:()()()A A A AB B B B CC C Cdi u L M Ri E dt di u L M Ri E dt di u L M Ri E dt=-++=-++=-++ (1-6)写成状态方程形式为:1A A A AB B B BC C C C di Rdt L M i u Edi Ri u E dt L ML M i u E R di L M dt ⎡⎤⎡⎤⎢⎥⎢⎥--⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥=+-⎢⎥⎢⎥⎢⎥⎢⎥--⎢⎥⎢⎥-⎢⎥⎢⎥⎣⎦⎣⎦⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦ (1-7)ABC 坐标系下PMSM 的电磁转矩表达式为:()d A A B B C C e L J d T E i E i E i T p dtω=++=+(1-8) 其中d T 表示电磁转矩,e ω表示转子电角速度,l T 为负载转矩,J 为机组的转动惯量,p 为极对数。
1.3 电动机统一控制理论1.3.1 调速的关键是转矩控制电动机调速的任务是控制转速,转速通过转矩来改变。
从转矩到转速是一个积分环节—机械惯量,即2375d L GD dnT T dt=- (1-9)式中:2GD 为电机和负载的飞轮力矩; d T ,l T 为电动机的电磁转矩和负载转矩;n 为转速。
从上式看出,除转矩外,再没有其他控制量可影响转速,如果能快速准确的控制转矩,使转矩实际值dT 对其给定值*d T 的影响如图1-1(a )所示,它是一个小惯性环节,传递函数为:*1()()1d d m T s T s sσ=+ (1-10)式中m σ为转矩环等效时间常数。
这样就能很好的控制转矩。
这时速度环的框图示于图1-3,控制对象是一个积分及一个小惯性环节,容易设计速度调节器使系统具有满意的动态品质。
如果dT 对*d T 的影响如图1-2(b )如示,它是一个振荡环节,且阻尼较小,无论怎样设计速度调节器都难获得满意结果。
从上述讨论可以看出,调速的关键是转矩控制。
a )小惯性b )衰减振荡 a)Small inertia b) Decay and shake图1-2 转矩响应波形Fig.1-2 The torque responds the wave form图1-3 速度环框图Fig.1-3 The speed surrounds the block diagram1.3.2 统一的电动机转矩公式欲控制转矩,必须知道电动机转矩与什么有关。
一台电动机,无论是直流还是交流,都由定子和转子两部组成,它们分别产生定子磁通势sF 和转子磁通势rF 如图1-4,将sF 和rF 合成,得合成磁通势cF ,由它产生磁链矢量。
当两个磁能势方向一致时,不产生转矩;若方向不一致,它们将互相吸引,产生转矩,使转子转动。
由电磁场理论知道,转矩为md rs E T θ∂=∂ (1-11)111111111sF rF图1-4 电机磁通势矢量图Fig.1-4 Open vectograph of magnetism of the electrical machinery式中:mE 为磁场能量(几乎全部储存在气隙中);rs θ为从r F 到s F 的夹角磁势能量增量m E B H∂=∂式中:B 为磁感应强度;H 为磁势强度 在气隙中,B ∝H ,而H ∝cF ,所以2()m e c E K F ∂=∂ (1-12)eK 比例系数由余弦定理2222cos c s r s r rsF F F F F θ=+-代入式(1-11)、(1-12)得电机转矩公式 sin d m s r rsT K F F θ= (1-13)式中mK 为比例系数由于sin sin ,sin sin s rs c rc r rs c csF F F F θθθθ==电动机转矩公式还可以写成s i n d m s c c s T K F F θ= (1-14) sin d m r c rsT K F F θ= (1-15)式(1-13)~(1-15)为统一的电动机转矩公式,可以看出,电动机的转矩等于三个磁通矢量中任两矢量的模和它们间夹角的正弦值之积,而与它们的绝对值位置、是否转动无关。