第8章 前馈-反馈复合控制系统分析与设计 [兼容模式]
换热器前馈—反馈控制系统的研究

引言前馈控制系统和反馈控制系统都属于单回路控制系统,它们有各自的优缺点。
诸如前馈控制能根据干扰值的大小在被调参数偏离给定值之前进行控制,使被调量始终保持在给定值上,但这种控制方式也存在局限,首先表现在前馈控制系统中不存在被调量的反馈,即对于补偿的结果没有检验手段。
反馈控制是根据被调量与给定值的偏差值来控制的,反馈系统的特点是在干扰作用下,必须形成偏差才能进行调节(或偏差即将形成),如果干扰已经发生,而被调参数还没变化时,调节器是不会动作的,即反馈控制总是落后于干扰动作,因此称之为不及时控制。
因此把它们结合起来就产生了前馈—反馈复合控制系统,这种系统能把前馈与反馈的优点结合起来,既能发挥前馈调节控制及时的优点,又能保持反馈控制对各种扰动因素都有抑制作用的长处,较好地解决了控制过程中的问题,通过仿真可以得出这种系统既能获得较好的稳定性,又有较好的抗扰性能。
本设计首先根据设计要求和原始数据补偿传函,然后利用衰减曲线法整定调节器参数,最后在系统动态Simulink结构图和MATLAB软件中进行仿真,得出曲线和相应的结论。
第一章概述1.1自动控制系统的简介1.1.1绪论生产过程中必须保证产品满足一定的数量和质量的要求,同时也要保证生产的安全和经济,这就要求生产过程在预期的工况下进行。
但是,生产过程往往受到各种扰动而偏离正常工况,必须通过自动控制随时消除各种干扰,保证正常运行。
更为严重的是有时自动控制系统本身也要发生故障,这就要求在设计自动控制系统时,考虑各种可能发生的故障,并加以保护。
因此,现代的自动控制系统往往包含自动保护、自动检测、自动报警、顺序控制等内容。
有时,它们有机的组合成一个不可分割的整体,以确保控制系统的安全可靠。
1.1.2 自动控制系统的分类(1)反馈控制系统这种控制系统的基本工作原理是根据被调量与其给定值之间的偏差进行调节,最后达到减小或消除偏差,简单说就是“按偏差调节”。
为了取得偏差信号,必须要有被调量测量值的反馈信号,因而将系统构成一个闭合回路,如图1-1所示。
前馈—反馈复合控制系统
目录课程设计任务书一、前馈—反馈复合控制系统1.1、前馈—反馈复合控制系统的基本概念 (3)1.2、概念的理解 (3)1.3、前馈—反馈系统的组成.........................................3—4 1.4、前馈—反馈复合控制系统的特点.. (4)1.5、前馈—反馈复合控制系统中前馈前馈控制器的设计 (4)二、控制系统的硬件设计2.1、S7—300系统组成 (4)2.2、CPU315—2DP (4)2.3、模式选择开关…………………………………..…….4—52.4、状态及故障显示 (5)三、控制系统的软件设计3.1、硬件组态 (5)3.2、工程管理器的使用 (6)3.3、新建工程....................................................6—9 3.4、组态监控画面. (9)3.5、组态变量……………………………………………9—10 3.6、软件编程…………………………………………..10—153.7、实验结果分析……………………………………….15—17四、控制系统的调试五、实验总结一、前馈—反馈复合控制系统1.1、前馈—反馈复合控制系统的基本概念前馈—反馈复合控制系统:系统中既有针对主要扰动信号进行补偿的前馈控制,又存在对被调量采用反馈控制以克服其他的干扰信号,这样的系统就是前馈—反馈复合控制系统。
1.2、概念的理解:(1)复合控制系统是指系统中存在两种不同的控制方式,即前馈、反馈(2)前馈控制系统的作用是对主要的干扰信号进行补偿,可以针对主要干扰信号,设置相应的前馈控制器(3)引入反馈控制,是为了是系统能够克服所有的干扰信号对被调量产生的影响,除了已知的干扰信号以外,系统中还存在其他的干扰信号,这些扰动信号对系统的影响比较小,有的是我们能够考虑到的,有的我们肯本就考虑不到或是无法测量,都通过反馈控制来克服。
(4)系统中需要测量的信号既有被调量又有扰动信号。
第8-6章前馈控制系统

+ Y=T2
例:加热炉出口温度前馈-串级控制系统
原油
燃料
8.6.3 前馈控制系统的应用场合
1)干扰幅值大而频繁、对被控变量影响剧烈,仅采用反馈 控制达不到要求的对象。 2)主要干扰是可测而不可控的变量。 3)当对象的控制通道的惯性和滞后大,反馈控制不及时, 控制质量差时,可引入前馈控制。
4)当工艺上要求实现变量间的某种特殊的关系,而需要通 过建立数学模型来实现控制时,可以引入前馈控制。
过程控制
8. 6 前馈控制系统
6.2前馈控制
8.6.1 概述 8.6.2 前馈控制系统的结构 8.6.3 前馈控制系统的应用场合
8.6.1 概述
反馈控制特点(例:换热器温度控制系统)
蒸汽
Q1:冷物料流量 pD :蒸汽压力
TC
pD , Q2 Q1,T1 T2 给定值 偏差
T1:冷物料温度 T2:热物料温度
换热器温度前馈-反馈控制系统
前馈控制器的传递函数:
W
ff
(S )
W PD ( S ) W PC ( S )
前馈反馈控制系统实现完 全补偿与开环前馈比较前 馈控制器传函相同。
Q1 前馈-反馈控制原理方块图
Wff(S)
+
WPD(S) WPC(S)
+ T 2
T1i
-
WC(S)
前馈-反馈控制方框图
前馈-反馈控制系统优点: 1、只需对主要的干扰进行前馈补偿,其它 干扰可由反馈控制予以校正; 2、反馈回路的存在,降低了前馈控制模型 的精度要求,为工程上实现比较简单的通用 模型创造了条件; 3、负荷变化时,模型特性也要变化,可由 反馈控制加以补偿,因此具有一定自适应能 力。
第8章 前馈控制系统
第 8 章 前 馈 控 制 系 统
过 程 控 制 工 程 及 仿 真 - - 基 于 【原则5】: 原则 【原则4】: 原则 【原则3】: 控系统 MATLAB/Simulink MATLAB/Simulink MATLAB/Simulink
8.2 前馈控制系统设计
8.2.1前馈控制系统选用原则
【原则1】:扰动量可测不可控原则
过 程 控 制 工 程 及 仿 真 - - 基 于 MATLAB/Simulink MATLAB/Simulink MATLAB/Simulink
8.3 综合仿真实例
8.3.2 动态前馈系统仿真
(
)
第 8 章 前 馈 控 制 系 统
过 程 控 制 工 程 及 仿 真 - - 基 于 MATLAB/Simulink MATLAB/Simulink MATLAB/Simulink
8.3 综合仿真实例
8.3.3 前馈-反馈复合系统仿真
(
)
(
)
第 8 章 前 馈 控 制 系 统
MATLAB/Simulink MATLAB/Simulink MATLAB/Simulink
(
)
第 8 章 前 馈 控 制 系 统
过 程 控 制 工 程 及 仿 真 - - 基 于
k
8.1 前馈控制系统基础知识 8.1.3 系统分类
3.前馈-反馈复合控制系统 由前述分析知,反馈控制是针对系统全部干扰进行补偿,是在被控制量“变化了”的 基础上的“滞后补偿”;而前馈控制则是针对系统的某种特定干扰而进行的补偿,是在被 控制量“未变化前”提前进行的“超前补偿”。 而实际系统的干扰情况往往非常复杂,对所有干扰因素采用前馈控制是不可能的,在 要求精度较高时,完全采用反馈控制又难以实现系统的控制要求。 此时,常利用前馈和反馈的优点组成控制系统——前馈-反馈复合控制系统实现控制过 的高精度控制要求。 前馈-反馈复合控制系统 有 种 。
前馈控制系统共80页

T
检测变送
检测变送
31
前馈控制的选用与稳定性
实现前馈控制的必要条件是扰动量的可测及 不可控性
(1)可测:扰动量可以通过测量变送器,在 线地将其转换为前馈补偿器所能接受的信号。
(2)不可控:扰动量与控制量之间的相互独 立性,即控制通道的传递函数与扰动通道的 传递函数无关联,从而控制量无法改变扰动 量的大小。
8
(1)可测:扰动量可以通过测量变送器,在 线地将其转换为前馈补偿器所能接受的信号。
(2)不可控:扰动量与控制量之间的相互独 立性,即控制通道的传递函数与扰动通道的 传递函数无关联,从而控制量无法改变扰动 量的大小。
9
前馈控制的局限性 完全补偿难以实现:扰动通道和 控制通道的数学模型很难准确求 出;即使求出,工程上难以实现。 只能克服可测不可控的扰动
1
具有滞后特性,适合 于控制通道滞后小于 干扰通道滞后
1
Kf
t
38
实现办法
G ff
(s)
GPD (s) GPC (s)
-K f
T1s 1 1 T2s 1 1
1 s
2
1 s
2
上式中的各环节可以用 标准仪表(标准模块)
实现;也可以用比值器 、加法器和一阶惯性环
节或一阶微分环节实现 ;也可以用计算机程序
GC (s)
GP (s)
e s
Y (s)
经过预估补偿,闭环传递函数特征方 程消去了es,消去了纯滞后对系统控 制品质的影响,系统品质与无纯滞后 完全相同。至于分子中的es仅仅将控
制过程曲线在时间轴上推迟一个。 49
Smith补偿的实现
用近似数学模型模拟纯滞后环节—帕德 一阶和二阶近似式
MATLAB的毕业设计:前馈—反馈复合控制系统

前馈—反馈复合控制系统第一节前馈控制系统的组成在热工控制系统中,由于被控对象通常存在一定的纯滞后和容积滞后,因而从干扰产生到被调量发生变化需要一定的时间。
从偏差产生到调节器产生控制作用以及操纵量改变到被控量发生变化又要经过一定的时间,可见,这种反馈控制方案的本身决定了无法将干扰对被控量的影响克服在被控量偏离设定植之前,从而限制了这类控制系统控制质量的进一步提高。
考虑到偏差产生的直接原因是干扰作用的结果,如果直接按扰动而不是按偏差进行控制,也就是说,当干扰一出现调节器就直接根据检测到的干扰大小和方法按一定规律去控制。
由于干扰发生后被控量还未显示出变化之前,调节器就产生了控制作用,这在理论上就可以把偏差彻底消除。
按照这种理论构成的控制系统称为前馈控制系统,显然,前馈控制对于干扰的克服要比反馈控制系统及时的多。
从以上分析我们可以得出如下结论:若系统中的调节器能根据干扰作用的大小和方向就对被调介质进行控制来补偿干扰对被调量的影响,则这种控制就叫做前馈控制或扰动补偿。
前馈控制系统的工作原理可结合下面图1所示的换热器前馈控制进一步说明,图中虚线部分表示反馈控制系统。
一定。
当被加换热器是用蒸汽的热量加热排管中的料液,工艺上要求料液出口温度1热水流量发生变化时,若蒸汽两不发生变化,而要使出口温度保持不变,就必须在被加热水量发生变化的同时改变蒸汽量。
这就是一个前馈控制系统。
图中虚线所示是反馈控制的方法,这种方法没有前馈控制及时。
图1前馈控制系统的原理框图于图2所示。
图中,B k :测量变送器的变送系数;DZ W (s):干扰通道对象传递函数;D W (s):控制通道对象传递函数;B W (s):前馈控制装置或前馈调节器的传递函数。
第二节 前馈控制系统的特点理想的情况下,针对某种扰动的前馈控制系统能够完全补偿因扰动而引起的对被调量的影响。
实现对干扰完全补偿的关键是确定前馈控制器(前馈调节器)的控制作用,显然B W (s)取决于对象控制通道和干扰通道的特性。
前馈及复合控制
前馈及复合控制一、前馈及复合控制的基本概念在前面讨论的控制系统中,控制器都是按被控参数或其反馈值与给定值的偏差大小进行控制的,这种控制系统称为反馈控制系统.对于反馈控制系统无论是什么干扰引起被控参数的变化,控制器均可根据偏差进行调节,这是其优点;但从干扰产生到被控量发生变化以及偏差产生到控制作用产生,再由控制量改变到被控量发生变化,都需要一定的时间,所以控制总是落后于干扰作用。
由于反馈控制的作用机理决定了无法将干扰克服在被控量偏离设定值之前.因此,对一些滞后较大的对象来说,控制作用总是不及时,从而限制了控制质量的提高.为了解决上述问题,可以采用按扰动直接进行控制,即当扰动一出现,控制器就直接按扰动的性质和大小,以一定规律进行控制,可使被控量还未变化之前,就克服干扰对系统的影响,从而使控制作用提前和控制精度进一步提高。
这种按干扰进行控制的方式称为前馈控制。
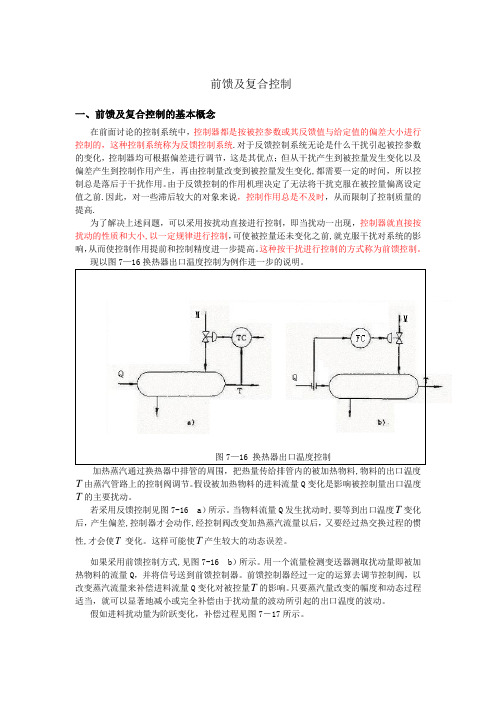
图7—16 换热器出口温度控制加热蒸汽通过换热器中排管的周围,把热量传给排管内的被加热物料,物料的出口温度T由蒸汽管路上的控制阀调节。
假设被加热物料的进料流量Q变化是影响被控制量出口温度T的主要扰动。
若采用反馈控制见图7-16 a)所示。
当物料流量Q发生扰动时,要等到出口温度T变化后,产生偏差,控制器才会动作,经控制阀改变加热蒸汽流量以后,又要经过热交换过程的惯性,才会使T变化。
这样可能使T产生较大的动态误差。
如果采用前馈控制方式,见图7-16 b)所示。
用一个流量检测变送器测取扰动量即被加热物料的流量Q,并将信号送到前馈控制器。
前馈控制器经过一定的运算去调节控制阀,以改变蒸汽流量来补偿进料流量Q变化对被控量T的影响。
只要蒸汽量改变的幅度和动态过程适当,就可以显著地减小或完全补偿由于扰动量的波动所引起的出口温度的波动。
假如进料扰动量为阶跃变化,补偿过程见图7-17所示。
图7—17 前馈控制系统的补偿过程化曲线。
若曲线b与曲线a大小相同,方向相反,则可能实现对扰动量的完全补偿,从而使被控量T与扰动量Q完全无关。
过程控制课程设计--前馈-反馈控制系统的设计与整定
过程控制课程设计--前馈-反馈控制系统的设计与整定北华航天工业学院课程设计报告(论文)设计课题:过程控制专业班级:学生姓名:指导教师:设计时间:201311.25-2013.12.06北华航天工业学院电子工程系过程控制课程设计任务书指导教师:教研室主任:2013年12月6日内容摘要自本世纪30年代以来,自动化技术获得了惊人的成就,已在工业和国民经济各行各业起着关键的作用。
自动化水平已成为衡量各行各业现代化水平的一个重要标志。
自动控制按输入量的变化规律分类,可分恒值控制系统(Fixed Set-Point Control System)、随动控制系统(Follow-up Control System)、过程控制系统(Process Control System)。
前馈-反馈控制系统的设计与整定,采用自动控制技术,实现对水箱液位的过程控制。
首先对被控对象的模型进行分析。
然后,根据被控对象模型和被控过程特性并加入PID调节器设计流量控制系统,采用动态仿真技术对控制系统的性能进行分析。
关键词:自动化过程控制PID目录一概述 (1)二方案设计与论证 (2)2.1 前馈控制 (2)2.2 反馈控制 (2)2.3 前馈-反馈控制 (3)2.4前馈-反馈控制系统PID算法 (4)2.5 控制方案的论证 (5)2.5.1控制方案的可靠性 (5)2.5.2控制方案的安全性 (5)2.5.3控制方案的经济性 (5)三仪表的选择与参数的设定………………………………………………………6 3.1 设备型号 (6)3.2 调节器及其参数的设置 (7)3.3 仪器仪表的组合安装 (8)3.4 计算机的参数设置 (9)四实验步骤…………………………………………………………………………9 五实验结果………………………………………………………………………10 六结论 (11)七心得体会………………………………………………………………………12 八参考文献………………………………………………………………………13一、概述PCT—I型过程控制实验装置是基于工业过程物理模拟对象,它集自动化仪表技术,计算机技术,通讯技术,自动控制技术为一体的多功能实验装置。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
前馈控制(Feed-Forward 前馈控制(Feed Forward Control)
完全补偿条件
Gd (s ) G ff (s )= ) K z (s )
Y (s) [G ff ( s ) K z ( s ) - Gd ( s )]G p ( s ) D( s)
1 给水流量W 扰动下的水位变化特性 1.
H(s) T W(s) s 1 Ts s(1 Ts)
其中:ε 为飞升速度
非沸腾式省煤器 T2 沸腾式省煤器
T1
2014/4/21
T2=30~100s T1=100~200s
H ( s ) s e W ( s) s
21
1.为什么说前馈作用的加入对系统的稳定性
没有影响?
2014/4/21
18
§8.3 三冲量给水控制系统
2014/4/21
19
给水控制的任务
1 维持汽包水位 1.
过高:蒸汽带水管壁和叶片结垢汽机叶片损坏 过低:爆管干锅
2. 保持给水量稳定 2
给水量的剧烈波动对省煤器和给水管道不利。
2014/4/21 20
第八章 前馈-反馈复合控制系统 分析与设计
《热工自动控制系统》
2014/4/21
1
第八章 前馈-反馈复合控制系统分析与设计 前馈 反馈复合控制系统分析与设计
8.1 8 1 前馈控制系统的组成及特点 8.2 8 2 前馈-反馈复合控制系统特性分析 前馈 反馈复合控制系统特性分析 8.3 三冲量给水控制系统
2014/4/21
2
§8.1 前馈控制系统的组成及特点
2014/4/21
3
反馈控制的“两段时间”
Gd Gc Kz H
D
Y0
Gp
Y
☆第一段时间:干扰产生 第 时间 产生被控量变化 被控 变 ☆第二段时间: 第二段时间:被控量变化 被控量变化执行器动作
2014/4/21 4
反馈控制的特点
1. 反馈控制是 反馈控制是一种具有很强鲁棒性的控制策略. 种具有很强鲁棒性的控制策略. •过程的性质决定了控制的效果 •调整参数( , TI , TD)均是过程动态特性的函数 2. 反馈控制本质上是一种误差驱动的控制系统 •控制策略是根据可测误差来产生控制作用 •没有动态误差的控制不是反馈控制 3. 反馈控制是一种闭环控制 4. 反馈控制的原则是尝试法, 无需数学模型 •控制器不能事先计算出准确的控制输出 •是一种初级的控制算法 是 种初级的控制算法
2014/4/21 44
(三)
串级三冲量给水控制系统
结构图和方框图 工作原理 及 冲量 调节器参数整定步骤
2014/4/21
45
串级三冲量给水控制系统
2014/4/21
46
1 结构图和方框图 1.
2014/4/21
47
2. 工作原理及冲量
2014/4/21
48
3 调节器参数整定步骤 3.
2014/4/21 41
4. 参数整定----外回路的整定
等效比例带:w
w
* 外 w w
被控对象:Wh(s)
外
w w
外 w w
* 外
从内外回路比例带看,w 对内外回路影响相反,若w 增大, 外回路稳定性增强,内回路减弱。故应使 和w 相应变化, 保持两者比值不变,以保证内回路的稳定性。
26
双冲量给水控制系统
2014/4/21
27
双冲量给水控制系统
前馈作用快速补偿了由于蒸汽流量变化引起的 虚假水位 现象。 “虚假水位”现象。
2014/4/21 28
2014/4/21
第七章 前馈-反馈控制系统分析与设计
28
三冲量给水控制系统
2014/4/21
29
三冲量给水控制系统 (单级)
2014/4/21
7
特点比较:
前馈基于干扰控制,反馈基于偏差控制 抑制干扰,前馈控制比反馈控制及时有效 前馈控制属于开环控制系统,反馈控制是闭环控 制系统 前馈控制使用的是与实施对象特性而定的专用控 制器,反馈控制采用通用PID控制器 一种前馈控制只能克服一种干扰,反馈控制只用 个控制器就可克服多个干扰 一个控制器就可克服多个干扰
2014/4/21 32
单级和串级三冲量给水控制系统
2014/4/21
单级
串级
33
(二) 单级三冲量给水控制系统
结构图和方框图 工作原理 及 冲量 静态配合 参数整定 调节器参数整定步骤
2014/4/21 34
单级三冲量给水控制系统
2014/4/21
35
1. 结构图和方框图
PID控制器接受三个信号:H 、 D 、 W
2014/4/21
36
2 工作原理 2.
PID 控制器接受三个信号:H 、 D 、 W D 信号主要作用:前馈信号 直接克服虚假水位的影响。
W 信号主要作用:反馈信号 信号主要作用 反馈信号
克服因给水阀自发扰动对 H(t)的影响,并保持稳定 可以增强调节过程的稳定性(使阀门动作不过调)
D D
2014/4/21
39
4 参数整定 4.
内回路整定 外回路的整定 αD 值的整定
2014/4/21
40
4 参数整定----内回路整定 4.
(1) 把调节器、分流系数除外的环节视为广义调节 对象W内,则 则W内为近似比例环节,故 为近似比例环节 故 和Ti可取得 很小。 一般 Ti ≤ 10s 。可试凑 。 (2) 先设定w ,找合适的 (3) 再改变w时,使 w / 不变,保证内回路开环放 大系数不变
2014/4/21 42
4 参数整定---- αD 值的整定 4.
按无静差要求,整定 αD 值
w w WD ( s ) D D Wh ( s )
2014/4/21 43
5 调节器参数整定步骤 5.
(1)按照迅速消除内扰、稳定给水量的要求, )按照迅速消除内扰、稳定给水量的要求 用试凑法整定内回路PI调节器的比例带值 δ/αw和积分时间Ti。 (2)根据水位在内扰时的动态特性Wh(s), ) 整定外回路等效调节器的比例带δ外,即确定αw, 此时,要保证已整定好的δ/αw比值不变。 (3)根据无静差要求,整定αD值,使 αwγW=αDγD(忽略排污)。
2014/4/21 10
思考题8-1:
1.若前馈控制系统的结构为:
想要完全消除扰动影响 前馈控制器应如何 想要完全消除扰动影响,前馈控制器应如何 选取?前提是什么?
2014/4/21 11
§8.2 前馈-反馈复合控制系统 特性分析
2014/4/21
12
前馈—反馈控制系统 前馈 反馈控制系统 要保证控制系统的控制品质、抗干扰 能力,有必要把前馈控制和反馈控制结合 起来,通过优势互补,提高控制系统的整 起来,通过优势 补,提高控制系统的整 体性能。
“虚假水位 虚假水位” ”现象 燃烧率先于蒸汽量变化
2014/4/21 23
二 给水控制的基本方案 二、给水控制的基本方案
(一)单冲量、双冲量、三冲量 )单冲 双冲 冲 (二)单级三冲量给水控制系统 (三)串级三冲量给水控制系统
2014/4/21
24
单冲量给水控制系统
2014/4/21
2014/4/21 13
前馈—反馈复合控制的特点 前馈 反馈复合控制的特点 1 引入反馈控制后,前馈控制的补偿条件不变 1. 引入反馈控制后 前馈控制的补偿条件不变
Gd (s ) G ff (s )= K z (s )
2014/4/21
14
前馈—反馈复合控制的特点 前馈 反馈复合控制的特点 2 前馈控制器的形式与前馈作用的位置有关 2.
忽略排污,则D = W
γh H -Kg Hg = α γ D - αw γw W
D D
γh H–Kg Hg = (α γ –αw γw )D
D D
设定 Kg 使在额定负荷 D=D0时
H=Hg γh Hg–Kg Hg =(α γ –αw γw )D0
D D
H - Hg = (α γ –αw γw )(D – D0)/ γh
=0
2014/4/21 6
前馈控制的特点 干扰一旦出现,调节器直接根据检测到 的干扰的大小和方向按 定规律进行控制 的干扰的大小和方向按一定规律进行控制。 显然,干扰发生后,被控制量发生变化 干扰发生后,被控制量发生变化 前 控制作用就产生了 节省了反馈控制的 前,控制作用就产生了,节省了反馈控制的 前,控制作用就产生了 “两段时间”,控制作用及时。
2014/4/21 8
前馈控制的局限性
Hale Waihona Puke 前馈控制属于开环控制,抗干扰能力差; 工业对象扰动多,无法一一设计前馈控制器; 控制通道迟延过大时无法实现完全补偿; 扰动作用很难精确测量。 扰动作用很难精确测量 完全补偿条件往往无法得到满足!
2014/4/21 9
前馈控制的应用场合
系统中存在着可测但不可控的变化幅度大,且频繁的
干扰 这些干扰对被控参数影响显著 单用反馈控制 干扰,这些干扰对被控参数影响显著,单用反馈控制 达不到质量要求时。
当控制系统的控制通道滞后时间较长 由于反馈控制 当控制系统的控制通道滞后时间较长,由于反馈控制
不及时影响控制质量时,可采用前馈或前馈 反馈控 不及时影响控制质量时,可采用前馈或前馈-反馈控 制系统 。
2014/4/21
25
第七章 前馈-反馈控制系统分析与设计
25
单冲量给水控制系统
优点:结构简单,运行可靠 适用:蒸汽量、给水量测不准时(低负荷);负 适用:蒸汽量 给水量测不准时(低负荷);负 荷变化不大、控制质量要求不高的小容量机组。