机械原理 第2章 作业
机械原理 课后习题答案
⎛ ⎜ ⎝
m / s2 mm
⎞ ⎟ ⎠
作加速度图
C
2
3
D
B
p(d) 4
(c3)
b2 (b1) (b3)
题3-8 c) 解(续2)
[解]
(3)加速度分析 aB 2 (= aB1) → aB3 → aC 3
1) 求aB2
A 1 ω1
2) 求aB3
aB3
=
an B3D
+
at B3D
=
aB
2
+
ak B3B2
得d点
p(c3)
E
vD = μv pd = 0.005 × 44.6 = 0.223 (m / s)
作 de ⊥ bc2
并使
de = DE = lDE = 40 bd BD lBD 50
得e点
vE = μv pe = 0.005 × 32.0 = 0.16 (m / s)
3) 求ω2
ω2
=
vC 2B lBC
p' = 2p'l + p'h − 3n' = 2 × 3 + 0 − 3× 2 = 0
p' = 2p'l + p'h − 3n' = 2 ×10 + 0 − 3×6 = 2
F = 3n − (2pl + ph − p') − F' = 3 × 11 − (2 × 17 + 0 − 2) − 0 =1
P24
B P23
3
2A
P12
1
4
D
P14
vE
=
vB
P13 E P13B
中南大学 专升本 机械原理 在线作业二及答案

一. 单选题(共20题,共80分)1. 设计凸轮机构时,()运动规律存在刚性冲击。
(4分)A.简谐B.等速C.正弦加速度★标准答案:B☆考生答案:★考生得分:0 分评语:2. 若铰链四杆机构满足杆长条件,使机构成为双摇杆机构,则()。
(4分)A.固定最短杆B.固定最长杆C.固定最短杆的对边★标准答案:C☆考生答案:★考生得分:0 分评语:3. 在尖顶推杆盘型凸轮机构中,若将原来的尖顶推杆换成滚子推杆,则()。
(4分)A.推杆的运动发生改变B.推杆的运动不变C.凸轮磨损加剧★标准答案:B☆考生答案:★考生得分:0 分评语:4. 曲柄为原动件的偏置曲柄滑块机构,当滑块的传动角最小时,则()。
(4分)A.曲柄与导路平行B.曲柄与导路垂直C.曲柄与连杆垂直★标准答案:B☆考生答案:★考生得分:0 分评语:5. 曲柄滑块机构的行程速比系数为()。
(4分)A.B.或C.★标准答案:B☆考生答案:★考生得分:0 分评语:6. 偏心轮机构是这样由铰链四杆机构演化而来的()。
(4分)A.扩大转动副B.取不同的构件为机架C.化转动副为移动副★标准答案:A☆考生答案:★考生得分:0 分评语:7. 以对心曲柄滑块机构的曲柄为机架时,得到的是()。
(4分)A.导杆机构B.摇块机构C.直动滑杆机构★标准答案:A☆考生答案:★考生得分:0 分评语:8. 下面那种情况下,存在死点()。
(4分)A.对心曲柄滑块机构,曲柄主动B.曲柄摇杆机构,曲柄主动C.曲柄摇杆机构,摇杆主动★标准答案:C☆考生答案:★考生得分:0 分评语:9. 机构的最小传动角可能发生在()位置之处。
(4分)A.主动曲柄与连杆二次共线B.主动曲柄与机架二次共线C.主动曲柄与摇杆二次共线★标准答案:B☆考生答案:★考生得分:0 分评语:10. 四杆机构处于死点时,其传动角为()。
(4分)A.B.★标准答案:A☆考生答案:★考生得分:0 分评语:11. 平面连杆机构的行程速比系数K可能的取值范围()。
中南大学 机械原理 第二章作业题答案

G
H
ED = FC=GH EF = DC 只有这样才能使得GH保持平行于机架移动, EG = HC 而不会引起倾斜 (3)作用: 使EFG部分与DCH部分相连接,并使 EFG部分重复DCH部分的运动
17B 7
6 H I 5 7 J 0
E 4
3 C F 7 B 2
A
7
1
1'
5' D 4 5
A
2
1
G
B
F 3n 2 PL PH P F
3 11 2 17 2 1
BL
1、6为原动件
F=2
+
+
Ⅱ级机构
+
2、6为原动件
Ⅲ级机构
BL
2
1 4
D
5
E
பைடு நூலகம்
B
C
3
2、折叠 F 3n 2 PL PH 3 4 2 5 1 运动过 1 程
3、折叠 状态
A
1' 2
D4
5'
E
B3 C BL
19、在如图所示的机构中,在铰链B、C、D处,被连接的两构件 上连接点的轨迹都是重合的,那么能说该机构有三个约束吗(5)?
C B A
分析: (1)、运动简图
(2)、自由度:
F 3 3 2 4 1 0
该方案的机构不能运动
(3)、修改方案:
BL
21、图示为一内燃机的机构简图,试计算其自由度,并分析组 成此机构的基本干组。如果在该机构中改选EG为原动件,试问 组成此机构的基本干组是否与前有所不同。
+ + + +
机械原理作业册答案
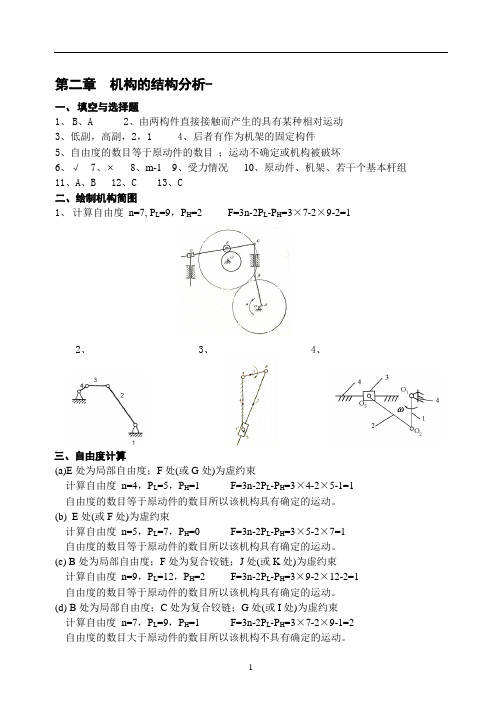
第二章机构的结构分析-一、填空与选择题1、B、A2、由两构件直接接触而产生的具有某种相对运动3、低副,高副,2,14、后者有作为机架的固定构件5、自由度的数目等于原动件的数目;运动不确定或机构被破坏6、√7、8、m-19、受力情况10、原动件、机架、若干个基本杆组11、A、B 12、C 13、C二、绘制机构简图1、计算自由度n=7, P L=9,P H=2 F=3n-2P L-P H=3×7-2×9-2=12、3、 4、三、自由度计算(a)E处为局部自由度;F处(或G处)为虚约束计算自由度n=4,P L=5,P H=1 F=3n-2P L-P H=3×4-2×5-1=1自由度的数目等于原动件的数目所以该机构具有确定的运动。
(b)E处(或F处)为虚约束计算自由度n=5,P L=7,P H=0 F=3n-2P L-P H=3×5-2×7=1自由度的数目等于原动件的数目所以该机构具有确定的运动。
(c) B处为局部自由度;F处为复合铰链;J处(或K处)为虚约束计算自由度n=9,P L=12,P H=2 F=3n-2P L-P H=3×9-2×12-2=1自由度的数目等于原动件的数目所以该机构具有确定的运动。
(d) B处为局部自由度;C处为复合铰链;G处(或I处)为虚约束计算自由度n=7,P L=9,P H=1 F=3n-2P L-P H=3×7-2×9-1=2自由度的数目大于原动件的数目所以该机构不具有确定的运动。
(e) 构件CD(或EF)及其两端的转动副引入一个虚约束计算自由度n=3,P L=4,P H=0 F=3n-2P L-P H=3×3-2×4=1自由度的数目等于原动件的数目所以该机构具有确定的运动。
(f) C处为复合铰链;计算自由度n=7,P L=10,P H=0 F=3n-2P L-P H=3×7-2×10=1自由度的数目等于原动件的数目所以该机构具有确定的运动。
奥鹏作业大工《机械原理》在线作业2
大工20秋《机械原理》在线作业2齿轮机构是由()组成的一种高副机构。
选项【A】:主动齿轮
选项【B】:从动齿轮
选项【C】:机架
选项【D】:以上选项均不正确
正确选项:A,B,C
圆形平面齿轮机构按齿形分可分为()。
选项【A】:直齿
选项【B】:斜齿
选项【C】:人字齿
选项【D】:曲齿
正确选项:A,B,C
圆形空间齿轮机构按齿形分可分为()。
选项【A】:直齿
选项【B】:斜齿
选项【C】:人字齿
选项【D】:曲齿
正确选项:A,B,D
按照轮齿在圆柱体上排列方向的不同,平面齿轮机构可分为()。
选项【A】:直齿圆柱齿轮机构
选项【B】:平行轴斜齿圆柱齿轮机构
选项【C】:人字齿齿轮机构
选项【D】:曲线齿圆柱齿轮机构
正确选项:A,B,C,D
产生根切的齿轮的特点是()。
机械原理作业

机械原理习题2013.02第2章平面机构的结构分析2-1 绘制图示机构的运动简图。
(a) (b)题2-1图2-2 计算图示机构的自由度,并指出复合铰链、局部自由度和虚约束。
ABCDE(a)ABDCE(b)ABCDE(c)(e)(f)题2-2图2-3 计算刹车机构在刹车过程中的自由度。
H(g)题2-3图2-4计算图示机构的自由度,并判断机构运动是否确定。
若存在复合铰链、局部自由度或虚约束,请指出。
(a) (b)题2-4图2-5 判断图示机构设计是否正确。
若不正确,提出修改方案。
题2-5图2-6 填空题1)在平面机构中具有一个约束的运动副是 副。
2)使两构件直接接触并能产生一定相对运动的连接称为 。
3)平面机构中的低副有 副和 副两种。
4)机构中的构件可分为三类:固定构件(机架)、原动件(主动件)、 件。
5)在平面机构中若引入一个高副将引入 个约束。
6)在平面机构中若引入一个低副将引入 个约束。
7)在平面机构中具有两个约束的运动副是 副和 副。
2-7 判断题1)具有局部自由度的机构,在计算机构的自由度时,应当首先除去局部自由度。
( )2)具有虚约束的机构,在计算机构的自由度时,应当首先除去虚约束。
()3)虚约束对运动不起作用,因此是多余的。
()4)若两构件之间组成两个导路平行的移动副,在计算自由度时应算作两个移动副。
()5)若两构件之间组成两个轴线重合的转动副,在计算自由度时应算作两个转动副。
()6)六个构件组成同一回转轴线的转动副,则该处共有五个转动副。
()7)当机构的自由度F>0,且等于原动件数,则该机构具有确定的相对运动。
()8)虚约束对机构的运动有限制作用。
()2-8 选择题1)机构中的构件是由一个或多个零件所组成,这些零件间()产生相对运动。
A. 可以B. 不能C. 不一定能2)原动件的自由度应为()。
A. 0B. 1C. 23)在机构中原动件数目()机构的自由度数且大于0时,该机构具有确定的运动。
机械原理作业集第2版参考答案
机械原理作业集(第2版)参考答案(注:由于作图误差,图解法的答案仅供参考)第一章绪论1-1~1-2略第二章平面机构的结构分析2-12-22-3 F=1 2-4 F=1 2-5 F=1 2-6 F=12-7 F=0机构不能运动。
2-8 F=1 2-9 F=1 2-10 F=1 2-11 F=22-12 F=12-13 F=1 2为原动件,为II级机构。
8为原动件,为III级机构。
2-14 F=1,III级机构。
2-15 F=1,II级机构。
2-16 F=1,II级机构。
F=1,II级机构。
第三章平面机构的运动分析3-13-2(1)转动中心、垂直导路方向的无穷远处、通过接触点的公法线上(2)P ad(3)铰链,矢量方程可解;作组成组成移动副的两活动构件上重合点的运动分析时,如果铰链点不在导路上(4) 、 (5)相等(6) 同一构件上任意三点构成的图形与速度图(或加速度图)中代表该三点绝对速度(或加速度)的矢量端点构成的图形, 一致 ;已知某构件上两点的速度,可方便求出第三点的速度。
(7)由于牵连构件的运动为转动,使得相对速度的方向不断变化。
3-31613361331P P P P=ωω 3-4 略3-5(1)040m /s C v .=(2)0.36m /s E v = (3) ϕ=26°、227° 3-6~3-9 略3-10(a )、(b )存在, (c )、(d )不存在。
3-11~3-16 略 3-17第四章 平面机构的力分析、摩擦及机械的效率4-14-24-3 )sin )((211212l l ll l l f f V +++=θ4-4 F =1430N 4-5~4-9略232/95.110s m v -==ωB v JI v4-10 )2()2(ρρη+-=b a a b4-11 5667.0 31.110==≤ηϕα 4-12 8462.0=η 4-13 605.0=η4-14 2185.0=η N Q 3.10297= 4-15 7848.0113.637==ηN F4-16 KW P 026.88224.0==η 4-17 KW P 53.96296.0==η4-18 ϕα2≤ 4-19 F =140N4-20 ϕαϕ-<<O 90第五章 平面连杆机构及其设计5-15-2(1) 摇杆(尺寸),曲柄(曲柄与连杆组成的转动副尺寸),机架(连杆作为机架) (2) 有,AB ,曲柄摇杆机构 ;AB ;CD 为机架(3) 曲柄 与 机架 (4) 曲柄摇杆机构、曲柄滑块机构、摆动导杆机构 (5) 曲柄摇杆机构、摆动导杆机构;曲柄滑块机构 (6) 等速,为主动件 (7) 7 (8) 往复 ,且 连杆与从动件 (9) 选取新机架、刚化搬移、作垂直平分线;包含待求铰链 且 位置已知 (10) 9 ; 5 5-3 70 < l AD <670 5-4~5-18 略5-19 l AC =150mm l CD =3000mm h =279.9 mm5-20 a =63.923mm b =101.197mm c =101.094mm d =80mm第六章 凸轮机构及其设计6-16-26-3(1)等加速等减速、余弦加速度(2)刚性、柔性(3)理论廓线(4)互为法向等距曲线(5)增大基圆半径、采用正偏置 (6)增大基圆半径、减小滚子半径(7)提高凸轮机构运动的轻巧性和效率、避免加速度过大造成冲击 6-4略 6-56-6 ~ 6-13略 6-146-15 6-16略第七章 齿轮机构及其设计7-1︒==6858.70822rad πδ︒='=︒≡====1803064.3432.1700min max 0δδαααmmh mm r 6332.343776.51240-='='-=δy x6395.185947.4060='-='=δy x7-27-3(1) (2)7-4 z = 41.45 7-5略7-6 (1) (2) 7-7 7-8略 7-9 7-10 7-11略7-12 (1) (2) (3) 7-13(1) (2) (3) 7-14略7-15 7-16略7-17 共有7种方案 7-18~7-19 略 7-20302021==z z mmr mms mm s a b a 0923.1052816.178173.6===634.1=εαmmj mmc mma t 77.269.494.15523.23='='='=α'smm v mm L /490==刀294-==x z 8.04.88==x z 0399.02='x 9899.482234117229.1142444153.44='''=='==K K Kρθα mmr K K 3433.702444='= α8879.22α='mm r mm r 2.618.4021='='mmd z mmm 120304===5.0-=x mms 827.4=058.1-=x7-21 7-22 略7-23正传动, 7-24~7-25 略 7-26(1)正传动(2) 7-27 略 7-287-29 略第八章 齿轮系及其设计8—18—28—3(1)从动轮齿数的连乘积除以主动轮齿数的连乘积、数外啮合次数或用画箭头的 (2)用画箭头的(3)有无使行星轮产生复合运动的转臂(系杆) (4)相对运动原理(5)一个或几个中心轮、一个转臂(系杆)、一个或几个行星轮(6)转化轮系中A 轮到B 轮的传动比、周转轮系中A 轮到B 轮的传动比、AB i 可以通过H ABi 求解(7)找出周转轮系中的行星轮、转臂及其中心轮 (8)传动比条件、同心条件、均布装配条件、邻接条件(9)传动比很大结构紧凑效率较低、要求传动比大的传递运动的场合、传动比较小效率较高、传递动力和要求效率较高的场合mm a 5892.90='mm r a 93.581=13.7291β=116.36v z = 2.6934γε=2222(1)175(2)185163(3) 5.7106(4)112.5a f d mm d mm d mma mmβ=====(10)差动轮系 8-4 8-58-6 8-7 8-8 8-98-10 8-11 8-12(a ) (b ) 8-13(1) (2) 8-14 z 2≈68 8-15 8-168-17 (1) (2) 8-188-198-20 m in /28.154r n B -=8-21只行星轮满足邻接条件件,只行星轮不满足邻接条34144803mml z H ==8-22 162/108/5463/42/2136/24/12321===z z z第九章 其他常用机构9-1 9-2 9-3 9-4mms 075.0=232==n k mml B 3=8.658=ϕm in/84r n =mm R 975.23=32143211''-=z z z z z z i H m in/3r n H =NF 64.308=5.141-=i 072.016-=i m in /600r n H -=m in/385.15r n H =31=H i 8.11=H i 0=H n min /667.653197min /2min /340042r n r n r n A ≈===m in /47.26r n c =m in/1350r n c -=min /6349.063407r n ≈=4286.0731-≈-=H i .1533.433=i第十章 机械的运转及其速度波动的调节10-110-210-3 2 05.050kgm J Nm M e er =-=10-4222212334111()()e e z z J J J J m m e M M Qe z z =++++=- 10-520.14.20J kg m M Nm ==-10-6 2334.()cos cos ABr G l h J M F G gφφ==- 10-7332.18221857e e J kgm MNm ==10-811100/50/rad s rad s αω==10-9maxmax minmin 30.048140.962/2 39.038/0,2rad s rad s δωφπωφπ=====10-102280.4730.388F FJ kgm J kgm '== 10-1102max max 623.1/min104.1654 2.11329F n r J kgm φ===10-12max max minmin 0.06381031.916/min 968.08/mine bn r nr δφφφφ===== 10-1326maxmin 302F eb f Nm J kgm ωφωφ==→→第十一章 机械的平衡11-111-211-3 2.109252.66o b b r cm θ==11-412.31068.5273bA bB m kg m kg==11-511-611-711-8)(2)(2 , )b )( )( , )a ⅡⅡ ⅠⅠ ⅡⅡ ⅠⅠ 上下动不平衡静平衡上下动不平衡静平衡mrr m mr r m mr r m mr r m b b b b b b b b ====oⅡb Ⅱo b Ⅰgm W W W 90 84.08419 gm 0628.1Ⅱb 3Ⅰb ==='==θθ0B 0A 120 285.0 8584.260 285.0 8584.2======bA bB bA bA kg m kgmm W kg m kgmm W θθ0Ⅱb 0Ⅰb 147 725.0 290316 65.1 660======b Ⅱb Ⅱb Ⅰb Ⅰkg m kgmm W kg m kgmm W θθ。
机械原理典型例题(第二章机构分析)10-13
ω
1 2 3
解: 机构的自由度, 机构的自由度, n = 4, pl = 6, ph = 0 F = 3n - 2 pl - ph = 3×4-2×6-0 × - × - =0 F<机构原动件数 < 不能运动。 不能运动。 修改: 修改: 增加机构自由度的 方法是: 方法是:在机构的 适当位置添加一个 活动构件和一个低 副或者用一个高副 代替原来机构中的 一个低副。 一个低副。
例9:图示牛头刨机构设计方案图。设计者的意图是动力由曲 :图示牛头刨机构设计方案图。 输入, 使摆动导杆3做往复摆动 柄1输入,通过滑块 使摆动导杆 做往复摆动,并带动滑枕 输入 通过滑块2使摆动导杆 做往复摆动,并带动滑枕4 往返移动以达到刨削的目的。 往返移动以达到刨削的目的。试分析此方案有无结构组成原理 上的错误,若有,请说明原因并修改。 作业:补充修改方案) 上的错误,若有,请说明原因并修改。(作业:补充修改方案)
计算图示机构的自由度,并进行机构组成分析, 例8: 计算图示机构的自由度,并进行机构组成分析, 确定杆组和机构的级别。 确定杆组和机构的级别。
2
1 1 3 33 4 4
7
4
5 5
6
2 1
不同的原动件, 不同的原动件,组成机构的杆 组与级别不相同。 组与级别不相同。
解: 计算机构的自由度 A处为复合铰链,则 处为复合铰链, 处为复合铰链 n = 6, pl = 8, ph = 0 F = 3n - 2 pl - ph = 3×6-2×8-0 =2 × - × - 机构的组成 ① 以构件1、2为原动件: 以构件 、 为原动件: 为原动件 6-5为Ⅱ级杆组;3-4为Ⅱ级杆组 为 级杆组; 为 机构为Ⅱ级机构。 机构为Ⅱ级机构。 以构件2、 为原动件 为原动件: 以构件 、6为原动件: 1-3-4-5为Ⅲ级杆组,机构为Ⅲ 为 级杆组,机构为Ⅲ 级机构。 级机构。 以构件1、 为原动件 为原动件: 以构件 、6为原动件: 4-5为Ⅱ级杆组;2-3为Ⅱ级杆组 为 级杆组; 为 机构为Ⅱ级机构。 机构为Ⅱ级机构。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
30
A
D
(3)若此机构为双摇杆机构,lAB又应为多
少(1?) AB为最短
(2) AD为最短
lAB
lAB 50
30 35
30
lAB
15
(lAB )max 15mm
503030lABl
AB
50 3545lAB源自50或lAB
lAB 30
50 50
35
50
lAB
55
(lAB )min 45mm
♪ 2-2 ♪ 2-4 ♪ 2-8 ♪ 2-9
第2章 作业
2-2 图所示铰链四杆机构中,已知
lBC=50mm, lCD=35mm, lAD=30mm。 试问:
C 50
(1) 若此机构为曲柄摇杆机构,且AB杆 B
为曲柄,lAB的最大值为多少?
35
(2) 若此机构为双曲柄机构,lAB的最小 值为多少?
? (3)只能考虑不满足杆长和条件下的机构
AB为最短
l AB
l AB 50
30 35
30
15
l AB
30
AB为最长
l AB
lAB 30
50 50
35
55
lAB
115
lAB 50 35 30
30 lAB 50
AB既不最长也不最短 50 30 lAB 35 30 lAB 45
AB杆转过的角度大于C向
B1
B
A
e
θ B2
左移时转过的角度,也即
:极位夹角θ≠0,K ≠1。
因此机构有急回特性。
C
C2
(2) 急回特性:C向右移动时 转过角度180°+θ,空回行
C1
程转过角度180°-θ,具有
急回特性,所以工作行程
向右正确。
压力角:同时滑块右移时 的压力角小于左移时的压
2-8 试用几何法设计图所示的曲柄摇杆机构。已知摇杆的行
程速度变化系数k=1,机架长lAD = 120mm,曲柄长lAB = 2的0夹mm角;φ1且=4当5º曲。柄运动到与连杆拉直共线时,曲柄AB2与机架
确定比例尺μl ,作AD杆;
由于k=1,所以A,C1,C2共 线
A B2 B1
C1
E
以AD为边作45度线。以A为圆
C2 心,半径20mm画圆,与该线
50 lAB 35 30
C
50
B
15 lAB 45
或 55 lAB 115
35
30
A
D
2-4 如图所示为偏置曲柄滑块机构。
(1)判定该机构是否具有急回特性,并说明其依据;
(2)若滑块的工作行程朝右,试从急回特性和压力角两个方
面判定图示曲柄的转向是否正确,并说明理由。 (1) 因为当滑块C向右移动时
曲柄和连杆的长度
确定比例尺μl
C1
e
A
C2
180 • k 1 16.36
k 1
作图过程(略)
B1
B2
AC1=BC-AB AC2=BC+AB
AB=(AC2-AC1)/2
BC=(AC1+AC2)/2
lAB AB • l 24mm,
lBC BC • l 49mm
O
min
arccos
lAB lBC
相交于B1、B2;
过D作AB的垂线交AB延长线于
E,过E点作半径为20mm的圆
,与AB相交于C1、C2。 D 图中B1、B2、C1、C2即为极限
位置;
lBC =BC1* μl ≈ 85mm
2-9 设计一曲柄滑块机构。已知滑块的行程H=50mm, 偏距
e=10mm,行程速度系数K=1.2,试按1∶1的比例用几何法求
e
46.4