最新《机械原理》(于靖军版)第2章习题答案
机械原理 课后习题答案
⎛ ⎜ ⎝
m / s2 mm
⎞ ⎟ ⎠
作加速度图
C
2
3
D
B
p(d) 4
(c3)
b2 (b1) (b3)
题3-8 c) 解(续2)
[解]
(3)加速度分析 aB 2 (= aB1) → aB3 → aC 3
1) 求aB2
A 1 ω1
2) 求aB3
aB3
=
an B3D
+
at B3D
=
aB
2
+
ak B3B2
得d点
p(c3)
E
vD = μv pd = 0.005 × 44.6 = 0.223 (m / s)
作 de ⊥ bc2
并使
de = DE = lDE = 40 bd BD lBD 50
得e点
vE = μv pe = 0.005 × 32.0 = 0.16 (m / s)
3) 求ω2
ω2
=
vC 2B lBC
p' = 2p'l + p'h − 3n' = 2 × 3 + 0 − 3× 2 = 0
p' = 2p'l + p'h − 3n' = 2 ×10 + 0 − 3×6 = 2
F = 3n − (2pl + ph − p') − F' = 3 × 11 − (2 × 17 + 0 − 2) − 0 =1
P24
B P23
3
2A
P12
1
4
D
P14
vE
=
vB
P13 E P13B
机械原理练习及答案

第二章 平面机构的结构分析2-1 绘制图示机构的运动简图。
B解:大腿 小腿213456(b)ACB FEDB解:ABC DE FGH解:2-3 计算图示机构的自由度,并指出复合铰链、局部自由度和虚约束。
ABCDE(a)ABDCE(b)ABCDE(c)(e)(f)(g)解:(a) C 处为复合铰链。
7,n =p h =0,p l =10。
自由度 323721001W l h F n p p =--=⨯-⨯-=。
(b) B 处为局部自由度,应消除。
3n =, p h =2,p l =2自由度 323323121W l h F n p p =--=⨯-⨯-⨯=。
(c) B 、D 处为局部自由度,应消除。
3n =, p h =2,p l =2。
自由度 323323121W l h F n p p =--=⨯-⨯-⨯=。
(d) CH 或DG 、J 处为虚约束,B 处为局部自由度,应消除。
6n =,p h =1,p l =8。
自由度 32362811W l h F n p p =--=⨯-⨯-=。
(e) 由于采用对称结构,其中一边的双联齿轮构成虚约束,在连接的轴颈处,外壳与支架处的连接构成一个虚约束转动副,双联齿轮与外壳一边构成虚约束。
其中的一边为复合铰链。
其中4n =,p h =2,p l =4。
自由度 32342422W l h F n p p =--=⨯-⨯-=。
(f) 其中,8n =,p h =0,p l =11。
自由度 323821102W l h F n p p =--=⨯-⨯-=。
(g) ① 当未刹车时,6n =,p h =0,p l =8,刹车机构自由度为 32362802W l h F n p p =--=⨯-⨯-=② 当闸瓦之一刹紧车轮时,5n =,p h =0,p l =7,刹车机构自由度为 32352701W l h F n p p =--=⨯-⨯-=③ 当两个闸瓦同时刹紧车轮时,4n =,p h =0,p l =6,刹车机构自由度为32342602W l h F n p p =--=⨯-⨯-=知识青年22:53:08当闸瓦之一刹紧车轮时,n=5,ph=0,pl=7,刹车机构自由度为2知识青年22:53:36自由度为1知识青年22:54:22那么左边算虚约束吗左边是机架知识青年22:54:46当两个闸瓦同时刹紧车轮时,n=4,ph=0,pl=6,刹车机构自由度为0知识青年22:55:33四个活动构件是哪些呢?1、2、3、5知识青年22:56:23HD杆就不算活动构件吗?算知识青年22:59:53四个活动构件是BA\CBD\EC\还有EFGOJHI此时算一个构件吗,而HD不算活动构件?2-3 判断图示机构是否有确定的运动,若否,提出修改方案。
机械原理课后答案——第二章 机构的结构分析

Ⅱ级组
Ⅱ级组
解:3)EG为原动件,拆组
Ⅲ 级组
Ⅱ级组
2-24 试计算如图所示平面高副机构的自由度
解:1)计算自由度 F = 3n - ( 2Pl + Ph – p’ )-F’ =3×5 - (2×6+1 -0)-1 =1
2-21 试计算如图所示平面高副机构的自由度 解:2)从结构上去除局部自由度、 虚约束、多余的移动副、转动副
2-16 计算如图所示各机构的自由度。
F = 3n - ( 2Pl + Ph – p’ )-F’ =3×7 - (2×8+2 -0)-2 =1 (2、4处存在局部自由度)
F = 3n - ( 2Pl + Ph – p’ )-F’ p’ = ( 2Pl ’ + Ph ’)- 3n’ =3×11 - (2×17+0 -2)-0 =2×10 +0 -3 × 6 =1 =2 (C、F、K 处存在复合铰链) (重复部分引入虚约束)
2-14
解:1)绘制机构运动简图
F = 3n - ( 2Pl + Ph – p’ )-F’ =3×5 - (2×7+0 -0)-0 =1
2)弯曲90º 时的机由度。
F = 3n - ( 2Pl + Ph – p’ )-F’ =3×4 - (2×5+1 -0)-0 =1 (A处为复合铰链)
2-21 试计算如图所示平面高副机构的自由度 解:2)从结构上去除局部自由度、 虚约束、多余的移动副、转动副
2-21 试计算如图所示平面高副机构的自由度 解:3)高副低代
2-21 试计算如图所示平面高副机构的自由度 解:4)拆组
Ⅲ 级组
Ⅱ级组
2-21 试计算如图所示平面高副机构的自由度 解:3)高副低代
(完整版)机械原理课后全部习题答案

机械原理课后全部习题答案目录第1章绪论 (1)第2章平面机构的结构分析 (3)第3章平面连杆机构 (8)第4章凸轮机构及其设计 (15)第5章齿轮机构 (19)第6章轮系及其设计 (26)第8章机械运动力学方程 (32)第9章平面机构的平衡 (39)第一章绪论一、补充题1、复习思考题1)、机器应具有什么特征?机器通常由哪三部分组成?各部分的功能是什么?2)、机器与机构有什么异同点?3)、什么叫构件?什么叫零件?什么叫通用零件和专用零件?试各举二个实例。
4)、设计机器时应满足哪些基本要求?试选取一台机器,分析设计时应满足的基本要求。
2、填空题1)、机器或机构,都是由组合而成的。
2)、机器或机构的之间,具有确定的相对运动。
3)、机器可以用来人的劳动,完成有用的。
4)、组成机构、并且相互间能作的物体,叫做构件。
5)、从运动的角度看,机构的主要功用在于运动或运动的形式。
6)、构件是机器的单元。
零件是机器的单元。
7)、机器的工作部分须完成机器的动作,且处于整个传动的。
8)、机器的传动部分是把原动部分的运动和功率传递给工作部分的。
9)、构件之间具有的相对运动,并能完成的机械功或实现能量转换的的组合,叫机器。
3、判断题1)、构件都是可动的。
()2)、机器的传动部分都是机构。
()3)、互相之间能作相对运动的物件是构件。
()4)、只从运动方面讲,机构是具有确定相对运动构件的组合。
()5)、机构的作用,只是传递或转换运动的形式。
()6)、机器是构件之间具有确定的相对运动,并能完成有用的机械功或实现能量转换的构件的组合。
()7)、机构中的主动件和被动件,都是构件。
()2 填空题答案1)、构件2)、构件3)、代替机械功4)、相对运动5)、传递转换6)、运动制造7)、预定终端8)、中间环节9)、确定有用构件3判断题答案1)、√2)、√3)、√4)、√5)、×6)、√7)、√第二章 机构的结构分析2-7 是试指出图2-26中直接接触的构件所构成的运动副的名称。
机械原理第二章练习题答案
机械原理第二章练习题答案一、选择题1. 机械原理中,下列哪个不是机构的基本要素?A. 构件B. 运动副C. 力D. 运动链答案:C2. 机械原理中,平面机构自由度的计算公式是:A. F = 3(n-1) - 2pB. F = 3n - 2pC. F = 3(n-1) + 2pD. F = 3n + 2p答案:B3. 以下哪个不属于平面四杆机构的基本类型?A. 双曲柄机构B. 双摇杆机构C. 曲柄摇杆机构D. 曲柄滑块机构答案:D二、填空题1. 机械原理中,平面机构的自由度是指机构具有的独立运动参数的数目,其计算公式为 \( F = 3n - 2p \),其中 \( n \) 代表构件数,\( p \) 代表运动副数。
2. 平面四杆机构按照其运动特点可以分为双曲柄机构、双摇杆机构和曲柄摇杆机构,其中曲柄摇杆机构具有一个曲柄和一个摇杆。
三、简答题1. 简述平面机构的自由度对机械运动的影响。
答:平面机构的自由度决定了机构的运动能力。
自由度越高,机构的运动可能性越大,但同时也可能导致机构的控制更加复杂。
自由度为零时,机构处于完全约束状态,无法运动;自由度为1时,机构具有一个独立运动;自由度大于1时,机构具有多个独立运动。
2. 说明平面四杆机构的类型及其特点。
答:平面四杆机构分为三种基本类型:- 双曲柄机构:两个曲柄,无摇杆,运动平稳,但结构复杂。
- 双摇杆机构:两个摇杆,无曲柄,运动不平稳,结构简单。
- 曲柄摇杆机构:一个曲柄和一个摇杆,运动平稳,应用广泛。
四、计算题1. 已知一个平面机构由5个构件组成,其中转动副3个,滑动副2个,请计算该机构的自由度。
解:根据自由度计算公式 \( F = 3n - 2p \),代入 \( n = 5 \) 和 \( p = 5 \)(转动副和滑动副总数),得到 \( F = 3 \times 5- 2 \times 5 = 7.5 \)。
由于自由度必须是整数,这里需要重新检查题目数据或假设条件。
机械原理课后习题集 第二章 连杆机构
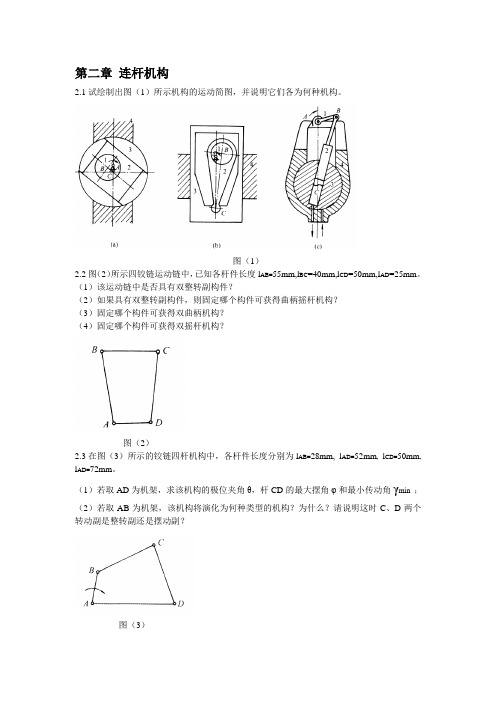
第二章连杆机构2.1试绘制出图(1)所示机构的运动简图,并说明它们各为何种机构。
图(1)2.2图(2)所示四铰链运动链中,已知各杆件长度l AB=55mm,l BC=40mm,l CD=50mm,l AD=25mm。
(1)该运动链中是否具有双整转副构件?(2)如果具有双整转副构件,则固定哪个构件可获得曲柄摇杆机构?(3)固定哪个构件可获得双曲柄机构?(4)固定哪个构件可获得双摇杆机构?图(2)2.3在图(3)所示的铰链四杆机构中,各杆件长度分别为l AB=28mm, l AD=52mm,l CD=50mm, l AD=72mm。
(1)若取AD为机架,求该机构的极位夹角θ,杆CD的最大摆角φ和最小传动角γmin ;(2)若取AB为机架,该机构将演化为何种类型的机构?为什么?请说明这时C、D两个转动副是整转副还是摆动副?图(3)2.4对于一偏置曲柄滑块机构,试求:(1)当曲柄为源动件时机构传动角的表达式;(2)试说明曲柄r,连杆l和偏距e对传动角的影响;(3)说明出现最小传动角时的机构位置;(4)若令e=0(即对心曲柄滑块机构),其传动角在何处最大?何处最小?2.5图(5)所示为六杆机构。
已知l AB=200mm, l AC=585mm, l CD=300mm, l DE=700mm,A C⊥EC,ω1为常数。
试求:(1)机构的行程速度变化系数;(2)机构5的冲程H;(3)机构最大压力角αmax发生的位置及大小;(4)在其它尺寸不变的情况下,欲使冲程为原冲程的2倍,问曲柄长度应为多少?图(5)2.6试求图(6)所示连杆机构中构件4与构件2的角速度比ω4/ω2。
图(6)2.7在图(7)所示的机构中,已知曲柄2顺时针方向匀速转动,角速度ω2=100rad/s,试求在图示位置导杆4的角速度ω4的大小和方向。
2.8图(8)所示为加热炉炉门的启闭状态,试设计一机构,使炉门能占有图示的两个位置。
图(8)2.9 欲设计一个如图(9)所示的铰链四杆机构.设已知其摇杆CD的长度l CD=75mm,行程速比系数K=1.5,机架AD的长度l AD=80mm,又知摇杆的一个极限位置与机架见的夹角φ=45°,试求其曲柄的长度l AB和连杆的长度l BC.图(9)2.10试设计如图(10)所示的六杆机构。
机械原理第二章练习题答案

机械原理第二章练习题答案机械原理第二章练习题答案第一题:一个质量为10kg的物体以2m/s的速度向上运动,经过2s后速度变为4m/s,请问这个物体所受到的力是多少?解析:根据牛顿第二定律,力等于质量乘以加速度。
首先计算加速度,加速度等于速度变化量除以时间,即(4m/s - 2m/s) / 2s = 1m/s²。
然后将加速度代入公式,力等于质量乘以加速度,即10kg * 1m/s² = 10N。
所以这个物体所受到的力是10N。
第二题:一个力为20N的物体受到一个与其运动方向相反的恒力作用,物体的加速度为4m/s²,请问物体的质量是多少?解析:根据牛顿第二定律,力等于质量乘以加速度。
将已知数据代入公式,20N = 质量* 4m/s²。
解方程可得质量= 20N / 4m/s² = 5kg。
所以物体的质量是5kg。
第三题:一个质量为2kg的物体受到一个力为10N的作用,物体的加速度是多少?解析:根据牛顿第二定律,力等于质量乘以加速度。
将已知数据代入公式,10N = 2kg * 加速度。
解方程可得加速度 = 10N / 2kg = 5m/s²。
所以物体的加速度是5m/s²。
第四题:一个质量为5kg的物体受到一个力为30N的作用,物体的加速度是多少?解析:根据牛顿第二定律,力等于质量乘以加速度。
将已知数据代入公式,30N = 5kg * 加速度。
解方程可得加速度= 30N / 5kg = 6m/s²。
所以物体的加速度是6m/s²。
第五题:一个质量为10kg的物体受到一个力为50N的作用,物体的加速度是多少?解析:根据牛顿第二定律,力等于质量乘以加速度。
将已知数据代入公式,50N = 10kg * 加速度。
解方程可得加速度= 50N / 10kg = 5m/s²。
所以物体的加速度是5m/s²。
通过以上练习题,我们可以看到牛顿第二定律在解决物体运动问题中的应用。
机械原理习题参考答案
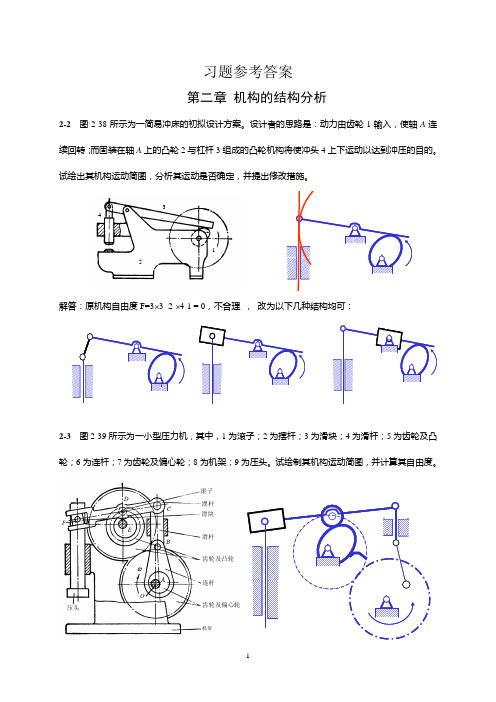
习题参考答案第二章 机构的结构分析2-2 图2-38所示为一简易冲床的初拟设计方案。
设计者的思路是:动力由齿轮1输入,使轴A 连续回转;而固装在轴A 上的凸轮2与杠杆3组成的凸轮机构将使冲头4上下运动以达到冲压的目的。
43512解答:原机构自由度F=3⨯3- 2 ⨯4-1 = 0,不合理 ,2-3 图2-39所示为一小型压力机,其中,1为滚子;2为摆杆;3为滑块;4为滑杆;5为齿轮及凸轮;6为连杆;7为齿轮及偏心轮;8为机架;9为压头。
试绘制其机构运动简图,并计算其自由度。
O齿轮及偏心轮ωA齿轮及凸轮BEFDC压头机架连杆滑杆滑块摆杆滚子解答:n=7; P l =9; P h =2,F=3⨯7-2 ⨯9-2 = 12-6 试计算图2-42所示凸轮—连杆组合机构的自由度。
解答:a) n=7; P l =9; P h =2,F=3⨯7-2 ⨯9-2 =1 L 处存在局部自由度,D 处存在虚约束 b) n=5; P l =6; P h =2,F=3⨯5-2 ⨯6-2 =1 E 、B 处存在局部自由度,F 、C 处存在虚约束b)a)A EMDFELKJIFBCCDBA2-7 试计算图2-43所示齿轮—连杆组合机构的自由度。
BDCA(a)CDBA(b)解答:a) n=4; P l =5; P h =1,F=3⨯4-2 ⨯5-1=1 A 处存在复合铰链b) n=6; P l =7; P h =3,F=3⨯6-2 ⨯7-3=1 B 、C 、D 处存在复合铰链2-8 试计算图2-44所示刹车机构的自由度。
并就刹车过程说明此机构自由度的变化情况。
解答:① 当未刹车时,F=3⨯6-2 ⨯8=2② 在刹车瞬时,F=3⨯5-2⨯7=1,此时构件EFG 和车轮接触成为一体,位置保持不变,可看作为机架。
③ 完全刹死以后,F=3⨯4-2⨯6=0,此时构件EFG 、HIJ 和车轮接触成为一体,位置保持不变,可看I F EHJOGCAB D作为机架。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2-1 绘制题图2-1所示各个平面机械实体的机构运动示意图(无精确尺寸的比例要求)。
手摇打气筒汽车发动机罩壳泵手动冲孔机
1
颚式破碎机偏心轮传动机构水泵
折叠椅
开关窗机构夹钳剪刀式千斤顶
题图2-1
解:
2-4 在题图2-4所示的铰链四杆机构中,已知l AB =50mm,l BO1=35mm,l O1O3=30mm,取O1O3为机架。
(1)如果该机构能成为曲柄摇杆机构,且O1A是曲柄,求l AO1的取值范围;
(2)如果该机构能成为双曲柄机构,求l AO1的取值范围;
(3)如果该机构能成为双摇杆机构,求l AO1的取值范围。
B
答:(1) l AO1≤15mm
(2) 45mm≤ l AO1≤55mm
(3) 15mm< l AO1<45mm或55< l AO1<115
2-5 在题图2-5所示的铰链四杆机构中,各杆件长度分别为l AB =28mm,l BC=70mm,l CD=50mm,l AD=72mm。
若取AB为机架,该机构将演化为何种类型的机构?为什么?请说明这时C、D 两个转动副是周转副还是摆转副?
题图2-5
答:由于28+72 < 70+50,因此存在曲柄,又因为AB为最短杆,故若取AB为机架,该机构将演化为为双曲柄机构。
这时C、D均为摆转副。
2-6 试推导有无偏置条件下,曲柄滑块机构中的曲柄存在条件。
已知曲柄长为a,连杆长为b,偏置为e。
答:无偏置时,曲柄存在的条件是a ≤ b;有偏置时,曲柄存在的条件是a +e ≤ b。