汽车电动助力转向器的控制器研制
汽车转向助力电动机设计和工艺流程

汽车转向助力电动机设计和工艺流程下载温馨提示:该文档是我店铺精心编制而成,希望大家下载以后,能够帮助大家解决实际的问题。
文档下载后可定制随意修改,请根据实际需要进行相应的调整和使用,谢谢!并且,本店铺为大家提供各种各样类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,如想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by the editor. I hope that after you download them, they can help yousolve practical problems. The document can be customized and modified after downloading, please adjust and use it according to actual needs, thank you!In addition, our shop provides you with various types of practical materials, such as educational essays, diary appreciation, sentence excerpts, ancient poems, classic articles, topic composition, work summary, word parsing, copy excerpts,other materials and so on, want to know different data formats and writing methods, please pay attention!汽车转向助力电动机设计和工艺流程在汽车工业中扮演着重要的角色。
电控液压助力转向系统控制器的开发

图 1 ECHPS 系统 收稿日期: 2006- 12- 06
1 两相混合步进电机恒转矩细分原理
两相混合步进电机可以抽象为如图 2 所示模 型, 绕组间的电角度为 90°, 则两相电流的相位差也 为 90°。
1
10.8
8.8
18.2
13.0
1.5
2
13.2
10.8
0.0
13.3
0.8
3
12.3
10.1
6.8
13.2
0.0
4
13.0
10.6
1.5
13.1
0.8
5
14.2
11.6
7.6
13.4
1.5
6
14.5
11.9
9.8
13.3
0.8
7
13.7
11.2
3.8
13.1
0.8
8
13.911.45.313.20.0
可变的电控液压助力系统。通过控制步进电机带动的泄流旁通阀, 改变了系统在不同车速工况下的助力特性。主要
对控制器电路进行了详细设计, 实现了步进电机的细分驱动控制, 能根据车速的不同调节系统液压油流量。最后通
过试验验证了控制器的性能。
关键词: 电控液压助力转向; 步进电机; 细分驱动
中图分类号: U463.44+3
电控液压助力转向系统控制器的开发 / 李 勇, 季学武, 孙凌玉
设 计·研 究
电控液压助力转向系统 控制器的开发
李 勇 1, 季学武 2, 孙凌玉 1
( 1. 北京航空航天大学 汽车工程系, 北京 100083; 2. 清华大学 汽车研究所, 北京 100084)
单片机控制下的汽车电动助力转向系统分析
单片机控制下的汽车电动助力转向系统分析汽车电动助力转向系统是基于单片机控制的系统,通过单片机对电动助力转向器的控制,实现对汽车转向的辅助力。
汽车电动助力转向系统主要由电动助力转向器、电动助力转向控制器、电动助力转向传感器和单片机等组成。
电动助力转向器是汽车转向系统中的核心部件,通过电机的工作来提供辅助力。
而电动助力转向控制器则是对电动助力转向器的工作进行控制,并通过反馈信号实现对转向系统的动态控制。
在电动助力转向系统中,单片机起到了重要的作用。
它负责控制整个系统的运行,包括对电动助力转向器的电机控制、传感器数据的采集和处理等。
单片机可以通过接收传感器反馈的转向角度、车速等信息,来判断汽车当前的转向状态和转向力度需求,从而调整电动助力转向器的工作。
电动助力转向传感器是通过感应汽车转向轴的转动来测量车辆的转向角度的设备。
它将转向角度的信息传递给单片机,单片机根据转向角度的反馈信息来实时判断汽车的转向状态,并根据转向动态调节电动助力转向器的工作。
通过单片机对电动助力转向器的控制,可以实现对汽车的转向的电动助力,提高驾驶的舒适性和操控性。
单片机可以根据不同的驾驶情况,调整电动助力转向器的助力大小,使得驾驶员在车辆转向时感受到合适的辅助力。
除了对电动助力转向器的控制,单片机还可以通过与其他汽车系统的通信,实现对整个汽车系统的综合控制。
例如,单片机可以与ABS系统和ESP系统等进行联动,实现在紧急制动和操控情况下的智能转向控制,提高汽车的安全性能。
综上所述,单片机控制下的汽车电动助力转向系统通过对电动助力转向器的控制,实现对汽车转向的辅助力。
单片机通过接收传感器的反馈信息,根据车辆的转向状态和转向力度需求来调整电动助力转向器的工作。
通过与其他汽车系统的联动,可以实现对整个汽车系统的综合控制,提高汽车的安全性能和操控性能。
基于DSP的汽车电动助力转向系统控制器设计研究

中图分类号:T M 381 文献标识码:A 文章编号:100126848(2006)0920057204基于DSP 的汽车电动助力转向系统控制器设计研究何 军,谢 暄(北京交通大学电子信息工程学院,北京 100044)摘 要:为了使汽车操作性能更优,设计了以16位定点DSP T MS320LF2047A 为核心的电动助力转向系统控制器。
控制系统主要由控制器、传感器和信号处理电路、助力电机及驱动电路等组成。
介绍了系统的工作原理、控制器的硬件结构和软件设计,基本上满足了系统的要求。
关键词:汽车;电动助力转向;电子控制单元;设计;数字信号处理器D eve lopm en t of C on tr oller of the Autom ot ive Electr ic Power Steer i ng Syste m Ba sed on DSPHE Jun,X I E Xuan(B eijing Jiaot ong University,Beijing 100044,China)ABSTRAC T:The EPS contr ol system consists of the contr olle r,sens ors and the signal p r ocessing cir 2cuits,the elec tric mot or and its driving cir cuit,e tc .The contr olle r of e lec tric power stee ring syste m was devel oped based on a 16bit fix DSP na m ed T MS320LF2047A,made by T I Cor p.The working princi 2ple,the hardware structure,s oft wa r e design of the syste m were intr oduced,which ha s achieved the de 2m and of the syste m basically .KEY W O RDS:A utomobile;Electric power steering;Electric contr ol unit;Design;DSP收稿日期6220 引 言随着现代汽车技术的迅猛发展,人们对汽车转向操纵性能的要求也日益提高。
电动液压助力转向系统控制器开发
科技 嚣向导
◇高 教论述◇
电动液压助力转向系统控制器开发
邱 义 宾
( 重庆 交通大 学机 电与汽 车 工程学 院 中国 重庆
4 07 ) 0 0 4
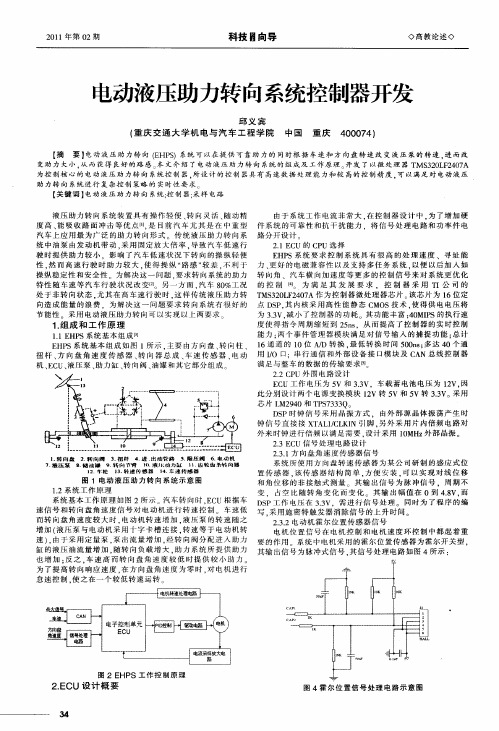
【 摘 要】 电动液压助 力转 向 (HP )系统可以在提供 可靠助力的 同时根据车速和 方向盘转速改 变液压泵 的转速 , E S 进而改
变助 力 大 小 , 而 获得 良好 的路 感 。 文 介 绍 了 电动 液 压 助 力 转 向 系统 的 组 成. - 原 理 。 从 本 x 作 Ls 开发 了以微 处 理 器 TMS 2 L 2 0 A 3O F4 7
为控 制 核 心 的 电动 液压 助 力转 向 系统控 制 器 , 所设 计 的控 制 器具 有 高速 数 据 处理 能 力 和较 高 的控 制 精 度 , 以满 足 对 电动 液 压 可 助 力转 向 系统 进行 复 杂控 制 策 略 的 实时 性要 求 。
2 1E U 的 C U 选 择 . C P
1 组 成 和 工 作 原 理 .
11E S 系 统 基 本 组 成 . HP
E P H S系 统 要 求 控 制 系统 具 有 很 高 的 处 理 速 度 、寻 址 能 力、 更好 的 电 磁兼 容性 以及 支持 多任 务 系 统 . 以便 以后 加 人 如 转 向角 、汽 车 横 向 加 速 度 等 更 多 的控 制 信 号 来 对 系 统更 优化 的 控 制 [ 为 满 足 其 发 展 要 求 . 控 制 器 采 用 r 公 司 的 4 1 I ’ I T S 2 L 2 0 Байду номын сангаас作 为 控 制器 微处 理 器 芯 片 该 芯 片 为 1 M 30F47 6位 定 点 D P 其 内核 采 用 高 性 能 静 态 C S技 术 . 得 供 电 电 压将 S. MO 使 为 33 减小 了控 制 器 的功 耗 。其 功 能 丰 富 :0 I S的执 行 速 - V, 4MP 度 使 得 指 令 周 期 缩 短 到 2 n .从 而 提 高 了 控 制 器 的 实 时 控制 5s 能 力 : 个 事 件管 理 器 模 块 满 足 对 信 号输 入 的 捕 捉 功 能 : 两 总计
车电动助力转向器电控单元(ECU)的研究 毕业设计论文

摘要电动助力系统采用电动机提供助力,具有转向力可变、路感良好、环保、耗能低和维修方便等优点,充分体现出汽车向智能化发展、满足未来安全性要求和环保要求的发展趋势。
本文在深入学习电动助力系统工作原理的基础上,设计了电动助力系统控制单元的硬件电路,研究了控制策略和算法,开发了相应的软件程序,印制了电路板,在自行搭建的试验平台上进行了实验验证。
具体工作内容如下:1. 研究了电动助力转向系统的发展和系统的基本原理;2. 在充分考虑满足电动助力控制单元功能需求的基础上,开发了一套基于单片机80C552的电机控制方案:利用电子执行单元(ECU)实时采集信号,运用PWM技术实现对H桥和电动机进行电流闭环控制,并完成了硬件电路设计;3. 在保证汽车的稳定性和安全性条件下,通过深入研究助力控制、回正控制和阻尼控制策略,提出了基于PID的控制算法,开发了核心控制程序;上述研究工作实现了电动助力系统低速轻便、高速稳定的使用要求,为下一步的工程实用化奠定了先期技术基础。
关键词:电动机,PID,控制策略,PWMAbstractEPS is a kind of power steering system following the system of hydraulic, motor was adopted to offer power directly. EPS has many advantages such as adjusted power which is controlled by the automatically controlling unit,good way sense,environmental protection,low energy consumption, convenient maintenance. The development trend of intelligent vehicles, future security requirements and environmental requirements was fully represented by EPS.In this thesis the Electronic Control Unit (ECU) and the software program of the ECU was designed, control strategies and algorithm were also studied based on the study of the operation principles of EPS. Following is the detailed process:1. Basic components, working principle and mathematical model of Brushless DC Motor (BLDCM) were described in detail.2. While the functions of ECU were considered, a scheme of motor control based on the high-performance microcontroller 80C552 was put forward and the ECU was designed. PWM technique was used to control H and closed loop motor current.3. Three control strategies which are assisting mode return ability and damp mode to get a stable steering under various conditions was presented and discussed in this paper. And a control algorithm based on PID was proposed under the strategies.The research above make the A/D acquisition program, speed signal acquisition program of the Electric power steering system come true, and t it laid a practical basis for the next preliminary technology.Keywords: MOTOR; PID; Control Strategy; PWM目录摘要 (Ⅰ)Abstract (Ⅱ)目录 (Ⅲ)第一章绪论 (1)1.1电动助力转向系统 (1)1.1.1电动助力转向系统的原理及发展 (1)1.1.2 电动助力转向系统控制单元 (3)1.2国内外研究现状 (4)1.3课题研究的目的和意义 (6)1.4本文研究内容 (6)第二章助力特性和控制策略研究 (8)2.1助力特性分析 (8)2.1.1助力特性的概念 (8)2.1.2助力特性曲线分类 (9)2.2控制模式 (10)2.2.1助力控制 (11)2.2.2回正控制 (12)2.3控制策略研究 (13)2.3.1电机目标转矩的控制策略 (13)2.3.2助力电机的电流控制策略 (14)2.3.3控制算法 (14)2.4本章小结 (16)第三章硬件控制系统设计 (17)3.1 EPS控制系统的总体结构 (17)3.2 ECU的控制芯片 (18)3.3电源电路和信号处理电路 (19)3.3.1电源电路 (19)3.3.2扭矩信号 (20)3.4电机的控制电路和保护电路 (21)3.4.1电动机的PWM调压调速原理 (22)3.4.2功率开关部件的选择及其驱动电路 (24)3.4.3电动机的保护电路 (25)3.5故障诊断电路 (26)3.6系统硬件的抗干扰性设计 (27)3.7本章小结 (27)第四章EPS控制软件设计 (28)4.1系统控制软件概述 (28)4.2 转向盘转矩信号采集子程序 (29)4.3 车速信号的采集子程序 (29)4.4 目标电流的确定 (30)4.4.1 助力曲线与目标电流 (30)4.4.2 助力特性曲线的确定 (30)4.5 PWM 脉宽调制及电机控制 (31)4.6 判断转向子程序 (31)4.7 软件滤波设计 (31)4.8 本章小结 (32)结论及展望 (33)致谢 (35)参考文献 (36)附录 (38)第一章绪论汽车转向系统作为汽车的重要组成部分,决定着汽车主动安全性的关键,汽车是否具有安全的操作性能,始终是消费者最关心的,也是汽车厂商在日趋激烈的市场竞争中站稳,始终是消费者最关心的,也是汽车厂商在日趋激烈的市场竞争中站稳脚跟的根本。
汽车电动助力转向系统的研究与设计
汽车电动助力转向系统的研究与设计罗苏安;向宝瑜;陈宇;尤虎;杨剑;吴友宇【摘要】描述了电动助力转向系统(EPS)的结构和工作原理,给出了基于MC9S12P64的电子控制单元(ECU)的设计方案,介绍了控制单元、数据采集与处理单元和驱动单元的设计,并完成了控制策略和系统程序设计,对所设计的ECU进行了台架试验和整车试验,结果证明ECU符合设计要求,能够实现在各种行驶工况下提供最佳助力转向的功能.%The structure and mechanism of an electric power steering system (EPS) were introduced. A whole design project ofMC9S12P64 - based electronic control unit( ECU) was presented. And particularly the hardware on controller,current sampling and driving circuit were designed. The control strategies and system programs were proposed. Test - bed experiment and full - car experiment were completed. Based on experimental results, the ECU has been proven effective and can achieve the best power steering function in a variety of driving.【期刊名称】《武汉理工大学学报(信息与管理工程版)》【年(卷),期】2012(034)002【总页数】3页(P190-192)【关键词】电动助力转向;控制策略;台架试验;整车试验【作者】罗苏安;向宝瑜;陈宇;尤虎;杨剑;吴友宇【作者单位】武汉理工大学信息工程学院,湖北武汉430070;武汉理工大学信息工程学院,湖北武汉430070;武汉理工大学信息工程学院,湖北武汉430070;武汉理工大学信息工程学院,湖北武汉430070;武汉理工大学信息工程学院,湖北武汉430070;武汉理工大学信息工程学院,湖北武汉430070【正文语种】中文【中图分类】U463.4;TM921.5随着汽车技术的发展,人们对汽车方向盘转向操纵性能的要求越来越高,既要有适度的转向轻便性,又要满足操纵稳定性[1]。
汽车电动助力转向控制系统的研究

要求任意设计,以满足不同车型和不同用户的要
求. 如图4 所示,曲线8 是助力矩与汽车车速特
性图. 横坐标 E 为车速,单位为 k m·h -1 ,纵坐标 T 为助力力矩值(无量纲). 由曲线可以看出,在 高速时,助力小,有助于解决高速时发飘问题;低
速时,助力大. 有效解决了助力效果和操作稳定性 的矛盾.
系统. 方向盘转角!1 设为输入量,转矩传感器检 测到的转矩信号 M 设为输出量,输出与输入之 间的函数关系如下![,2 ]:
!1 = !1(I ); !2 = "I ,
(1 )
式中:!2 为输出轴转角;" 为输出轴角速度.
转矩传 感 器 检 测 到 的 转 矩 信 号 M 与 输 入
轴、输出轴的转角差成正比,即
图 3 ePS 的控制策略框图
预估模块包括对电机转速和方向盘角速度的
估计. 直流电机的转速特性为 J = U/Ce - R aI a/ C(e Ce 是电动机的电动势系数;I a 是电机电流;R a 是电动机电枢电阻),通过电机电枢电压和采样滤
波得到的电机电枢电流值可以预估出电机转速. 助力控制模块包括助力曲线参数的选择,助
中图分类号:U461 .3 文献标识码:A 文章编号:1671- 4512(2005 )07- 0077- 03
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
擒耍:研究了日本N4样机的电动助力转向系统的电机电流一输入扭矩特性。采用ATmegal6L单片机为处理器,以直流有刷电机 为执行器,应用PID补偿算法.设计了电动助力转向控制器。在试验台上进行了电机电流一输入扭矩特性试验,试验结果表明,该控
制器的助力曲线接近日本N4样机。能取得比较满意的助力效果。 关键词:电动助力转向系统 中围分类号:TM306
输入扭矩,N” t・'本控制嚣的试验曲线
《、壤管暑哲
m 0 0.
输入扣矩/Nm (¨日本N4样机的试验曲线
图5
Fig.5
试验曲线
Test
cllrve¥
3试验结果
图4是试验台的示意图。其中方向盘提供输入扭 矩;光电编码器检测方向盘的输入角度;输入扭矩传感 器的输出信号是差分信号,正负表示方向,满量程是
77
万 方数据
汽车电动助力转向器的控制器研制赖宋红,等 量,使得控制性能有了较大的改善∞1。 转向系统是人的“生命线”之一,必须保证高度的可 靠性。因此,需要ECU能够检测出各种可能发生的故 障并输出相应的代码。常见的故障与检测方法是:
鲐如抬柏:2
器的控制效果符合要求‘71。
①扭矩传感器工作不正常。扭矩传感器输出电 压是差分信号,开机检测时,对其正负输入端进行单端 A/D转换,如果结果不在2—3 V之间可以认为是扭矩 传感器有故障。 ②电机断、短路。可根据采样电阻的电流信号判断。 ③MOS管温度过高。可以利用温度传感器。
汽车科技,2001(3):11—15. [3】吴文江,季学武,杜彦良.电动转向控制系统跟踪性能研究[J]. 机械工程学报,2004。40(4):77一舳. [4]刘金琨.先进PID控制及其Matlab防真[M].北京:电子工业出 版社.2003. [5]马潮,詹卫前。耿德根.ATMe08原理及应用手册[M].北京:清 华大学出版社,2003. [6]王伯雄.测试技术基础[M】.北京:清华大学出版社,2003. [7】邓星钟.机电传动控制[M].武昌:华中科技大学出版社,2001.
1.2助力特性曲线 如图2所示为助力特性曲线,电机电流随输入扭 矩的增大而增大,当扭矩增大到一定值后,电机电流不 再随扭矩的增大而增大,而是以某一恒定的电流工作。 在相同的扭矩输入时,车速低时提供大电流以增加操 作的轻便性,车速高时提供小电流以获得更好的路 感…。当输入扭矩在零附近的一个小范围内的时候。
r鬲n
系统初始化
逦亨>斟囫巫
否F———————————1 ————L———_1 l 计算’前电流 l I
l
I
响应定时中断 ● 读扭矩.车速 ‘
——1—一一
¨n补偿算法 PWM输出 I
l
逦≥>赳玉杰匹 —至£——_1
I计算目标电漉
‘
l
中断返回
‘.)主程序渡稳(”中断程序嚣程
图3程序流程图
Fig.3 Flowchart of the program
汽车电动助力转向器的控制器研制赖宋红。等
汽车电动助力转向器的控制器研制
Research and Development of the Controller of Electric Power Steering System
赖索记1
丝四吕1
t-厅碑2
(浙江工业大学机械制造及自动化省郝共建教育部重点实验室‘。浙江杭州310018; 中国计量学院机电工程学院2,浙江杭州310014)
是可控负载。
范围为±l Nm,即在此转矩范围内,电机不提供助力。 试验结果表明,该控制器的助力曲线接近日本N4样 机,能取得了比较满意的助力效果。
参考文献 [1】季学武,马小平,陈奎元.EPS系统性能试验研究[J].江苏大学
学报:自然科学版,2004,25(2):116一119. [2]肖生发,冯樱.马力.电子控制式电动助力转向系统的开发前景CJ】.
PWM
control
control
0引言
电动助力转向系统EPS(electric
power
生相对位移,扭矩传感器把这个相对位移转变成电信 号传给控制单元,控制单元根据车速传感器和扭矩传 steering), 感器的信号决定电动机的旋转方向和助力电流的大 小,从而实现实时助力转向。因此,它可以在不同车速 下提供不同的助力效果,保证汽车在低速行驶时轻便 灵活,在高速行驶时稳定可靠H-。
on
EPS is designed.The characteristic 0f motor circuit vs.input torque is tested sist force of the
controller
the
test to
bench.Tim result of the test shows that the curve of provide
图2助力特性曲线
Fig.2 Characteristic cuⅣes of assist force
在设计的时候,以速度为0 km/h时的曲线为基 准,根据车速传感器的信号乘上小于l的不同系数便 可以得到在不同车速下的助力特性曲线。设计的控制 器只对其车速为零的时候的电机电流一输入扭矩特性 进行了试验。 1.3控制器所用的芯片 微处理器选用ATMEL公司的AVR系列单片机 ATmegal6L。AVR系列单片机是基于增强型的AVR RISC结构的低功耗8位CMOS微控制器,由于其先进 的指令集以及单时钟周期指令执行时间,ATmegal6L 运算速度快,而且具有单端输入A/D转换通道、可编 程增益的差分输入A/D转换通道、PWM通道等功能, 减少了外围电路的设计,增强了控制器的抗干扰性”1。 电机驱动芯片选用TD340。TD340适用于驱动N 沟道的H桥,尤其适用于控制直流电机,四个输出端 的开关频率可达25 kHz,速度和方向分别由两个输入 端控制,死区时间有2.5;zm,当出现异常情况时(例如 电机电流过大),可以通过拉低INI脚200 pan以上使 TD340工作于刹车模式,即将H桥的上桥MOS管或者 是下桥MOS管关断(具体由IN2脚控制),从而保护电 机。 要对电机电流进行闭环控制,还需要测量电机电 流电路,常用的方法是在电机回路中接入水泥电阻,测 取水泥电阻的端电压,经过放大后再进行模数转换,将 转换结果传给微处理器。运算放大器选用AD623。只 要确定接入的电阻就可以确定其放大倍数。 用H桥电路驱动电机,此部分虽然技术成熟,但 设计时需特别注意可靠性和承载能力设计,否则负载 一旦加上可能引起系统烧毁。H桥电路中的4个大功 率MOS管可以分别采用N沟道型和P沟道型MOS 管。因为一方面N沟道的MOS管载流子的迁移率较 高,频率响应较好,跨导较大;另一方面,N沟道的MOS 管增大了导通电流、减小了导通电阻、降低了成本,减
Abstract:The characteristic of megal6L single chip computer
直流电机调速ATmegall6L助力特性 文献标志码:B
脉宽调制控制PID控制
rotor circuit
V8.input torque of Japanese N4 electric
是58 A,直流电机的最大电流是25 A,能够满足要求,
弋蓁 ‘乒零
■入扭矩,N■
具备较好的性能和较高的可靠性¨。。 1.4散热设计 控制器H桥式电路的4个MOS管处的热量较大, 如果热量不能很快地散发将会严重影响到H桥的工 作情况以至不能达到良好的助力效果。解决散热问题 的方法是将控制器的电路板放入一个铝盒内,MOS管 下面贴有散热片,散热片和铝盒接触,使热量最终通过 铝盒散发出去。同时在PCB板布线的时候,大电流区 域布线要尽可能宽、尽可能短以减小内阻。
修改稿收lq日期:∞∞一05—19。 第一作者鞍棠红.男.1984年生,现为浙江工业大学机械电子专业在 读硕士研究生;主要从事机电控制的研究。 76
PROCF璐AUTOMATION
INSTRUMENTATION
VoL 30
No.4 April 2009
万 方数据
汽车电动助力转向器的控制器研制赖宋红,等 电机电流等于零,此时电机不提供助力,这称为死区。 之所以要留有死区是为了防止路面振动或其他原因引 起方向盘的不稳定而提供不必要的助力。 小了面积。综合考虑功率、可靠性要求,以及N沟道 MOS管的优点,在设计中采用了使用4个相同的N沟 道型MOS管(IRLR024N)构成的H桥电路,该MOS管 在25℃时的额定电流是82 A,在100 oC时的额定电流
20
4结束语
控制器主要由ATmegal6L和TD340构成。利用 PWM斩波技术控直流电机。在实验室里通过试验, 在相同车速下,EPS系统提供的助力从死区至饱和点 随转向盘转矩的增加而基本呈线性增大。为提高转向 盘中间位置时的路感,EPS系统设定转向盘转矩死区
方向盘
Nm;输出扭矩传感器满量程是50 Nm;磁粉制动器
power
steering
system(EPS)is studied.By adopting AT-
as
the processor;with DC brush motor柏actuator;and applying PID compensation algoritlun.the controller of
1硬件原理
图1 1.1
EPS系统结构
EPS工作原理
Fig.I
Structure 0f the electric power steering system
EPS系统主要由扭矩输入机构、扭矩传感器、电子 控制单元、电机和减速机构组成。图1为EPS系统结 构图。不转向时,电动机停止工作;开始转向时,驾车 者在方向盘上输入扭矩。该扭矩使输入轴和输出轴产
就是在机械转向系统中,用电池作为能源,电机作为动 力,以转向盘的转速和转矩以及车速为输入信号,通过 电子控制装置协助人力转向,并获得最佳转向力特性 的伺服系统。它广泛应用于轻型汽车及普通型轿车 上,可提高轿车的操纵稳定性和轻便性。目前汽车电 动助力转向技术在国外发达国家已趋完善…,几家国 际著名的大型汽车公司,如德尔福、铃木、TRw以及 ZF公司都在此领域做了大量的研究并已将推出的商 品安装在微型汽车和轿车上使用。国内各大汽车公司 及部分高校也进行了研究,但到目前为止都没有形成 产业化旧J。