电传动控制基础第七章 8K机车电子控制系统
8k电力机车使用说明书
8k电力机车使用说明书8K电力机车使用说明书一、引言8K电力机车是一种高性能的电力机车,本说明书旨在向用户提供详细的使用指南,以确保用户正确、安全地操作机车。
二、机车概述1. 机车外观:8K电力机车外观整洁、美观,采用高强度材料制造,具有良好的耐久性和抗腐蚀性。
2. 机车性能:8K电力机车采用先进的电力传动技术,具有出色的加速性能和牵引力,适用于各种运输任务。
3. 安全系统:机车配备了完善的安全系统,包括制动系统、防滑系统和防撞系统,以确保行车安全。
三、机车操作1. 启动与停止:按下启动按钮,机车将开始运行;按下停止按钮,机车将停止运行。
在启动和停止过程中,应注意平稳操作,避免急刹车或急加速。
2. 加速与减速:通过控制手柄来调节机车的速度。
向前推动手柄可加速,向后拉动手柄可减速。
在加速和减速过程中,应注意平稳过渡,避免突然变速。
3. 转向操作:通过转向盘来控制机车的转向。
向左转动转向盘可使机车向左转弯,向右转动转向盘可使机车向右转弯。
在转向过程中,应注意转向角度和速度,避免过度转向或转向不及时。
4. 灯光控制:机车配备前照灯、尾灯和转向灯。
通过控制开关来控制灯光的开关和闪烁。
四、维护与保养1. 清洁:定期清洁机车外观,保持机车整洁干净。
2. 润滑:定期给机车的关键部位进行润滑,以确保机车的正常运行。
3. 检查:定期检查机车的各项功能和部件,如制动系统、电池、电机等,确保其正常工作。
4. 维修:如发现机车有故障或异常情况,应及时联系专业维修人员进行维修。
五、安全注意事项1. 操作前请仔细阅读本说明书,并按照说明书的要求正确操作机车。
2. 在操作机车时,请注意周围环境,避免与其他车辆或行人发生碰撞。
3. 在停车时,请将机车停在平坦、稳固的地面上,并拉起手刹。
4. 在行车过程中,请保持适当的车距,遵守交通规则,确保行车安全。
5. 在维护和保养机车时,请切断电源,并采取相应的安全措施,避免触电或其他意外事故。
电传动控制基础第七章 8K机车电子控制系统

2. 当IS1突降后,A5输出正饱和 V462 V461导通 V460 V463截止 +15V R177 R182 C 输出电压IS2直线下降 时间常数为 = R•C = ( R182 + R177 ) • C74 = 2.8(S)
UN
三、晶闸管触发系统
UN 全波 整流
Uo
t t t t t t t t t
6
4 2 2 4 6 8 v IA2 R159
V457
– A2 +
V458
10K
2.
制动特性曲 线形成电路
-15V -V I0
R212 R216 R217
R220
V472
假设A处断开: A3: IA3 = K3v – K4I0 + C1 A4: IA4 = C2 V584 、 V591 最大值选择器
T4
T2
D2
T5
RM3
D3
Ud2
移相 检测
电机端压 开关 检测 控制电压
T6
D4
§7.2 8K型电力机车控制系统
8K机车控制系统:双闭环控制系统 内环是电流环——恒流无静差调速系统 外环是速度环——准恒速控制系统
控制流程:司机手柄指令器 特性控制器 牵引制动转换开关 给定积分器 调制器 传输总线 解调器 最大值限制器 防空转滑行装置 PI调节器 移相触发系统 整流电路
– LM139 + –15V
10K
D:d形成电路
100K U UF 100K 100K +15V LM124 UE
+5V d
– +
LM139
–
+
机电传动控制课件ppt精选全文

第一节 机电传动控制系统得组成与分类
一、自动控制系统分类: (4)按系统稳态时被调量与给定量有无差别,可分为
有静差调节系统与无静差调节系统。
(5)按给定量变化得规律,可分为 定值调节系统、程序控制系统与随动系统。
(6)按调节动作与时间得关系,可分为 断续控制系统与连续控制系统;
(7)按系统中所包含得元件特性,可分为 线性控制系统与非线性控制系统。
机电传动控制课件
第一节 机电传动控制系统得组成与分类
一、自动控制系统分类: (1)从组成原理上分类
开环控制系统: 特点:系统简单;控制精度不高。 闭环控制系统: 特点:系统较复杂;控制精度高。 (2)按反馈方式得不同,可分为 转速负反馈、电势负反馈、电压负反馈及电流 正反馈控制系统; (3)按系统得复杂程度,可分为 单环自动调节系统与多环自动调节系统;
3)调速得平滑性,通常用两个相
邻调速级得转速差来衡量。
S2
n02 nN n02
D nmax
nmax
nmin n02 nN
nmax S2
nN (1 S2 )
第二节 机电传动控制系统调速方案选择
动态指标:
1)最大超调量
MP
nmax n2 n2
100%
2) 过渡过程时间 T
3) 振荡次数 N
第一节 机电传动控制系统得组成与分类
二、一般自动控制系统组成:
比较
给定 Ug + U 放大
环节 — EBR 调节环节
执行 环节
测量 环节
扰动
被调 被调量
对象
n
第二节 机电传动控制系统调速方案选择
一、调速方法 ➢纯机械方法调速: 通过变速齿轮箱或几套变速皮带轮 或其她变速机构来实现; ➢纯电气方法调速: 通过改变电动机得机械持性实现, 这时机械变速机构简单、只一套变速齿轮或皮带轮; ➢电气与机械配合调速: 用电动机来得到多种转速,同 时,又用机械变速机构得换档来进行变速。
8K
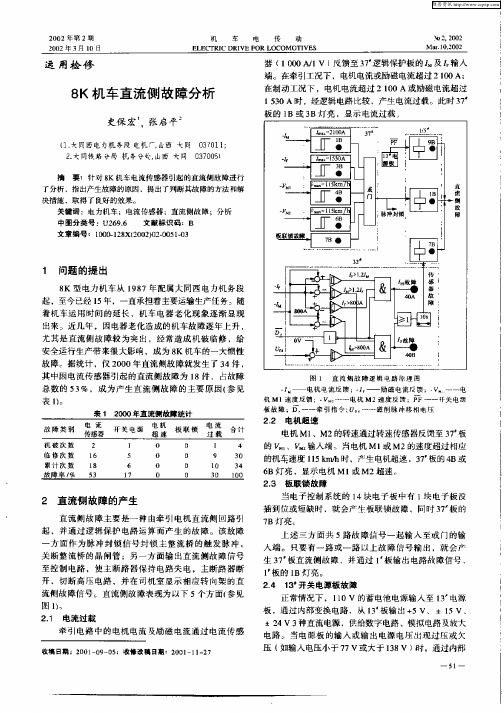
在 牵引工 况且磁场 削弱未投 入 的情 况下, 电机 电流 ^及励磁电流 值应 近似相等慨 一09 ^ 。当电机 电流 . ) 6 L> 0 80A且 ^ 1 / >. ; 2 ,持续 l 以上时 ,产生电机电流传 0s 感 器故障信号 ,3 的 4 A灯亮 ,显示 电机 电流传感 3板 0 器故障 。当励磁 电流 k 8 0 > 0 A且 > . 1 ^、持续 1 上 2 0s 时 ,产生励磁 电流传感器故障信号 ,3 的 4 B灯亮 , 3板 0
流侧故 障信号 。直流侧故 障表现为 以下 5个方 面r 参见
图 1。 1
21 电 流 过 载 .
牵 引 电路 中的 电机 电流及 励磁 电流通过 电流 传感
啦稿 日期 : 0 1 0 — 5 2 0 — 9 0 ;收 修改稿 日 :2 0 — 1 2 期 0 1 1—7
维普资讯
2 直流侧故障的产 生
直流 侧故 障主要 是一 种 由牵引 电机直 流删 回路 引 起 ,并通 过逻 辑保护 电路 运算 而产 生 的故 障 。该 故 障
一
当电子控制系统 的 1 电子 板 中有 1 电子板没 4块 块 插到位或短 缺时 ,就会产 生板联 锁故障 ,同时 3 7 板的
7 B灯 亮 。
22 电机 超 速 .
电机 M1 、M2的转速通过转速传感器反馈至 3 7 板 的 . : 、 输入端 。当电机 M1 M2的速度超过相应 或
的机车速度 15 m/ 1 h时,产生 电机超速 ,3 k 7板的 4 B或
6 B灯 亮 ,显 示 电机 M 1 M2超 速 。 或
23 扳联锁 故障 .
决措施 ,取得 了良好的效果。 关键词 :电力机车 ;电流传感器 ;直流侧故障 ;分析 中图分类号 :U 6 . 2 96 文献标识码 :B 文章编号 :10 _2 X(0 20 .0 1 3 0 o1 8 2 0 )20 5 - 0
电力机车电器第七章

第一节 司机控制器
三、HXD3型电力机车司机控制器
HXD3 型 电 力 机 车 两 端 司 机 室 操 纵 台 上 各 装 一 台 S640U-B型司机控制器。
第一节 司机控制器
1.结 构 从司机控制器面板上看:有两个控制器,一个为推 拉式主手柄,它是机车调速用控制推杆,它分为“牵引” 区域、“0”位区域、“制动”区域。另一个为换向手柄, 它是用于机车换向操纵,有“后”“0”“前”3个位置。 2.动作原理 司机控制器的面板上有主手柄、换向手柄两种可操 作机构。
第三节 传感器
1)按被测物理量分类 2)按工作原理分类 3.磁平衡式霍尔电传感器 磁平衡式霍尔电传感器是采用霍尔器件并引进瑞士 LEM 公司的技术——磁平衡原理制成的电传感器。 1)霍尔器件的工作原理
第三节 传感器第三节 传感器来自2)LEM传感器的工作原理
3)LEM传感器的特点
第三节 传感器
二、电流传感器
2.技术参数 触头S847W2A2b参数 触头S800A/SB参数 防护等级(污染等级3)(整机) 寿命
第三节 传感器
一、概 述
1.传感器的定义 传感器是借助于检测元件接收一种形式的信息,并 按照一定规律将它转换成另一种信息的装置。 2.传感器的分类 随着电子计算机、生产过程自动化、生物医学、环 保、能源、海洋开发、遥感、遥测、宇航等科学技术的 发展,从太空到海洋,从各种复杂的工程系统到日常生 活的衣食住行,都广泛采用了各种传感器。
第一节 司机控制器
2)主要技术参数 2.TKS14A型主司机控制器 1)结 构 TKS14A型司机控制器由上、中上、中下、下4层构 成,各层之间由钢板隔开,并由六方支柱支撑;上层 (面板上)主要有手轮1、手柄2;中上层主要为机械联 锁装置,包括作为联锁用的凸轮组3、4及定位用的凸轮 组5;中下层包括作为控制用以实现电逻辑要求的凸轮架 6和安装在其上的凸轮块7以及辅助触头盒8;下层主要有 电位器9及接线插座10。
《机车电传动与控制》

2021/3/8
6
2021/3/8
7
6. 电力机车控制系统与控制特性
① 8K机车
②
控制系统
机车特性曲线
② SS4机车
③
控制系统框图
④
控制方式
2021/3/8
8
8K机车控制系统
2021/3/8
9
机车控制
产生司机控制指令(特性控制器)
转向架控制
按司机指令,综合各种因素和限制条件 形成实际控制机车主电路负载电流的参 考电流IREF,实现主电路电流、电压的 (闭环)控制调节。
① 为了保证电力机车正常运行,机车上设有三 相 交流辅助电路,以供采用三相鼠笼式异 步电动机驱动的辅助机械装置(如冷却通风机、 油 泵、压缩机等)之用。
② 三相交流辅助电源由机车单相交流电源变换 而 来。三种方变换法: 旋转式劈相机 电容分相法 半导体静止逆变器
③ SS1机车辅助电路(旋转式劈相机Y型联接)
2021/3/8
(2-6-10)
2
2021/3/8
3
3. 电气制动---再生制动
8K机车再生制动 工况主电路:
全控桥电路 牵引电动机他励
2021/3/8
4
4. 减小谐波与功率因数补偿问题 采用功率因数补偿器 L-C, R-C, R-L-C
消除或减小三、五次谐波为主要目的
2021/3/8
5
5. 电力机车辅助电路
现代粘着控制方法的一个显著特点是能够自动搜寻粘着峰值点, 并使粘着工作点保持在粘着峰值点的附近,从而能够获得较高的粘着利 用率。根据搜寻粘着峰值点方法的不同,现代粘着控制方法可以分为蠕 滑速度法和粘着斜率法两大类。
ED=CenDΦD=IDz(Rz+∑RD)=IDzRz’
8K
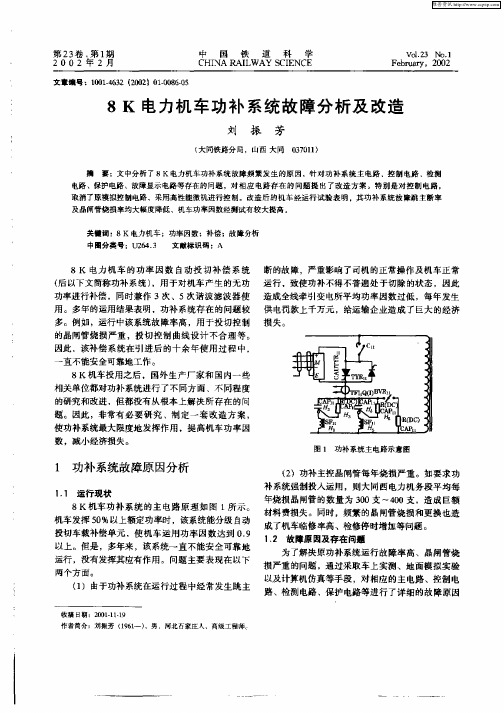
直不能安全可靠地工作 。 8K机车投 用之后 ,国外生产厂家和 国内一些
相关单位都对功补系统进行了不 同方面 、不 同程度 的研究和改进 ,但都没有从根本上解决所存在的问 题。因此 ,非常有必要研 究、制定 一套 改造方案 , 使功补系统最大限度地发挥作用,提高机车功率因 数 ,减小 经 济损失 。
维普资讯
第2 卷 , 1 3 第 期 2002年 2月
文章编号 :10 .6 2 (0 2 10 8 .5 0 14 3 2 0 l0 .0 60
中 国 铁 道 科 学
C NA J HI RA LWAY CI S ENCE
两个方 面 。
()由于功补 系统 在运 行过 程 中经 常发 生 跳 主 1
以及计算机仿真等手段 ,对相应 的主电路 、控制电 路、检测电路 、保护电路等进行了详 细的故障原因
收 穑 日期 : 20 .11 0 11 .9
作者简介:刘振芳 ( 9 卜一 , ,河北石家庄人,高级工程师 16 ) 男
电路 、 保护 电路 、故障显示 电路等存在的问题 , 相应 电路 存在 的 问题提 出 了改 造 方案 。特 别是 对控制 电路 , 对 取消 了原模拟控制电路 ,采用高性能微机 进行 控制 :改造后 的机 车经运行试 验表 明 , 功补系统 故障跳 主断 率 其
及 晶闸瞥烧损率均大 幅度降低 ,机车功率因数经测试 有较 大提高 。 关量 词 :8K电力机车 功率因数 ;补偿 ;故障分析
. 设备产生的谐波电流也流人本车的功补系统,从 而 2 1 1 方案介 绍 易使功补系统产生过电流 , 严重 时造成 晶闸管过流 吸收 电网谐 波 电流 的主要 原 因在 于滤 波器 的谐
烧损。
8T电机车教材

第七章蓄电池电机车【8t】第一节主要技术特征名称:双驾驶室防爆特殊性蓄电池电机车型号:CTL8-6-110-B型号含义:C—煤矿用机车T—蓄电池防爆特殊型L—两端司机室8—电机车粘重8t6—电机车轨距600mm110—电机车标称电压(110V)B—斩波调速第二节主要组成部分一、电气部分主要组成:电机车电气部分由蓄电池电源装置、插销连接器、司机控制器、牵引电动机等电气装置及连接导线构成。
1、蓄电池电源装置:由蓄电池组和电源箱构成,为机车提供电源。
2、插销连接器:用于接通电源和机车电路,内置熔断器起保护整机电路的作用。
3、司机控制器:司机控制操作面板上有换向开关、调速手柄、灯开关、喇叭按钮,内部有换向触头、接触组、数字电压表、霍尔速度给定器、照明用电源盒和斩波器,用于控制机车。
1)换向开关由2组接触铜片组成,完成两个电机的“0”位、“向前”、“向后”三个工作状态。
2)调速手柄用于控制电机车的启动、调速、全速及停止,与换向开关互锁。
3)斩波器由IGBT、续流二极管、电解电容、无感电容、霍尔电流传感器及控制驱动盒电路等组成。
所有原件安装在铝散热板上,铝散热班固定在防爆外壳上,通过防爆外壳传热。
4)照明开关安装在斩波调速控制器面板上,有“0”位、“前灯”、“后灯”三个工作状态,完成白灯、红灯的转换。
5)喇叭按钮安装在斩波调速控制器面板上,控制外电喇叭。
6)霍尔速度给定器安装在固定支架上,发出速度给定信号。
7)照明用电源盒安装在主控制器内为喇叭、照明灯提供电源。
8)数字电压表安装在控制器内,设有观察窗,便于观察电源电压。
4、牵引电动机:为电机车提供动力。
二、机械部分电机车机械部分由车架、行走装置、弹簧系统、制动系统、撒砂装置、缓冲装置、顶棚等主要部件组成。
1、车架车架由钢板焊接而成,是电机车的主体构件,起传递牵引力,安装电气设备和机械零件作用。
整个车架由两块隔板分成三个室,前、后室与顶棚一起构成两端司机室,司机室内安装有司机控制器等司机操作设备及电机车保护设备;中间为机械室,安装有行走、制动、撒砂、弹簧及部分电气设备。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
T4
T2
D2
T5
RM3
D3
Ud2
移相 检测
电机端压 开关 检测 控制电压
T6
D4
§7.2 8K型电力机车控制系统
8K机车控制系统:双闭环控制系统 内环是电流环——恒流无静差调速系统 外环是速度环——准恒速控制系统
控制流程:司机手柄指令器 特性控制器 牵引制动转换开关 给定积分器 调制器 传输总线 解调器 最大值限制器 防空转滑行装置 PI调节器 移相触发系统 整流电路
6
4 2 2 4 6 8 v IA2 R159
V457
– A2 +
V458
10K
2.
制动特性曲 线形成电路
-15V -V I0
R212 R216 R217
R220
V472
假设A处断开: A3: IA3 = K3v – K4I0 + C1 A4: IA4 = C2 V584 、 V591 最大值选择器
第七章 8K机车电子控制系统
§7.1 SS4型电力机车控制系统
两手柄: 电压指令手柄 给定电机端压 可实现恒流 电流指令手柄 给定电机电流 和恒压控制 司机电压给定 电压延时 电压参考值UREF PI调节器 电流给定 电流延时粘着限制 电流参考值IREF PI调节器
MAX
A1、A2构成全波整流电路 网压正半周:A1负 A2正 网压负半周:A1正 A2负
UN
50K
50K
– A1 +
LM124 22K
D1
Uo
Uo
UN
22K
– A2 +
D2
Uo t
B:积分电路
LM139:电压比较器 1. RU没有脉冲 场效应管截止 给电容C充电 t= U 达到最大值
RU
6
制动 4
2
0
F(kN) 600
184+4000t+ 9%0 1200A 0%0 800A
400
手柄在4位:起动电流为800A 平直道 :牵引力 阻力 V= 38km/h 牵引力=阻力 稳定运行
8
80 8 v(km/h)
200 400A
2
20 -200 2
4
40 4
6
60 6
1
9%0 :牵引力 阻力 手柄必须在第6位才能起动
– LM139 + –15V
10K
D:d形成电路
100K U UF 100K 100K +15V LM124 UE
+5+
–15V
–15V
UF -U t
UE:直流控制电压 UF -U:同步信号电压
当UE UF -U 时: d 输出高电平
d
t
E:有源滤波
68n
+5V 392K
UN
392K 5K7 68n
+15V A714
– +
do
LM139
–
+
–15V
UN
U
A714:滤波器 50Hz有源带通滤波器 LM139:过零比较器
do
单双边变换电路
移相控制电压ec
RM1 RM2 RM3
司机电压给定
电压反馈
UREF
电压延时
PI调 节器
0~-10V MAX 司机电流给定 单双边变换
ec
IREF
电流延时 粘着限制
PI调 节器
电流反馈
连续控制器 -3 -3 RM1 1 2 RM2
T3
RM2
T1
RM1
D1
Ud1
ec
-10~10V
偏压控制 网压过零ABC A B C RM3 3 180 °或 触发 0° 系统
信号形成电路
U 积分 器 UF Uo 移相 d 器 Ue
d0 RU
ds d0’ d’
700s
滤波器 比较器
RU
延时 ds d0’ d’ UF -U
d0
d
控制过程:
网压同步信号UN进行两方面的处理:
1. UN 全波整流 Uo 积分器 同步余弦信号U UF UF -U 直流控制电压Ue d
两级控制:机车控制
转向架控制
+15V
F
牵引
给定积分器 调制
总线
Iss
v
–15V
速度反馈 限制器 解调
制动
网压
Iss
Is
防 Iref 空 转
PI
UE
电流反馈 速度反馈
一、特性控制:单手柄特性控制器
10
牵引 6 4 8 11
2 0
11 10 8
顺时针转动: 牵引工况 分0~11级 逆时针转动: 制动工况 分0~11级 单手柄级位:n 电流指令 :I = 200 • n (A) 速度指令 :v = 10 • n (km/h)
– A6 +
R187 100K
IS2
R180 100K -15V
积分电路工作原理:
A5:放大倍数很大 工作在饱和区 A6:积分器 1. 当IS1突升后,A5输出负饱和 V462 V461阻断 V460 V463导通 -15V R180 R184 C 输出电压IS2为正 直线上升 时间常数为 = R•C = ( R184 + R180 ) • C74 = 6.6(S)
2. UN 滤波器比较器 d0 延时电路 各种
注意:
控制信号RU 、d0’、d’、ds
d0’ d’保证晶闸管承受正向阳极电压才允许获得触发脉冲 1. 保证移相电路有足够的复位时间 2. 在网压过零附近,晶闸管正向阳极电压太低或有不稳定 的毛刺时不应施加触发信号
+15V
A:全波整流电路
+15V
R161
R171
1.
牵引特性曲线形成电路
V455 -V I0 R163 V456 -15V
假设A处断开: A1: IA1 = K1I0 – K2v
A2: IA2 = I0
IA
R154
V456 、 V458 最小值选择器
IA1 8
R156 R165
– A1 +
R151
R164
IS1
A R167 10K
2. 当IS1突降后,A5输出正饱和 V462 V461导通 V460 V463截止 +15V R177 R182 C 输出电压IS2直线下降 时间常数为 = R•C = ( R182 + R177 ) • C74 = 2.8(S)
UN
三、晶闸管触发系统
UN 全波 整流
Uo
t t t t t t t t t
v
– A3 +
R253 V476
V584
IS1
A
IA4
+15V IA
– A4 +
R251
V591
IA3
二、积分延时电路
+15V
R176 1M IS1 47K5 R173 R177 220K
C74 10
V467
– A5 +
R175 1M
V460
V462 R216 56K
R174 47K5
V461
V463 R184 560K
U
t
t +15V 22K S G 68n D LM139
+5V
10K RU
+
2. 加入RU负脉冲 场效应管导通 Uo 78K 使C迅速放电 形成余弦信号
–
– LM124 +
–15V
U
10K
C:网压峰值记忆回路
U S G
D
– LM124 +
C +15V
UF +5V 10K ds
每半周内,U 达到最大值时: 输入网压过零信号ds 比较器输出高电平 场效应管导通 UC = U 电压跟随器 UF