基于MEMS加速度传感器的数字水平仪
基于MEMS加速度传感器的振动加速度测量系统设计
基于MEMS加速度传感器的振动加速度测量系统设计MEMS加速度传感器是一种用于测量物体振动加速度的小型传感器。
其采用了微电子机械系统(MEMS)技术,可以在小而轻的尺寸下提供高精度和高可靠性的加速度测量。
设计一种基于MEMS加速度传感器的振动加速度测量系统可以用于工业监测、结构健康监测、运动分析等领域。
以下是一种可能的设计方案,该方案可以实现实时采集、处理和显示振动加速度数据。
1.硬件设计:a. MEMS加速度传感器选择:选择具有高精度和高稳定性的MEMS加速度传感器,例如InvenSense公司的MPU-6050. 它具有±2g/±4g/±8g/±16g 这四种测量范围的选择,可以根据实际需求选择合适的量程。
b.数据采集电路:使用微控制器或单片机作为主控制器,通过I2C或SPI接口与MEMS加速度传感器进行通信。
采集传感器输出的原始加速度数据,并对其进行模数转换。
c.数据处理模块:在主控制器中设计一个数据处理模块,用于对采集到的原始数据进行滤波和数字信号处理。
可以采用数字滤波算法,如低通滤波器和移动平均滤波器,以降低噪声和滤除高频振动。
d.数据存储:设计一块闪存芯片或SD卡,用于存储采集到的加速度数据。
可以选择适当的存储器容量和数据写入速度,以满足实际应用需求。
e.显示部分:设计一块数字显示屏或连接到计算机的显示设备,用于实时显示振动加速度数据。
可以使用LCD屏幕或者通过串口将数据传输到计算机进行可视化显示。
2.软件设计:a.主控制器程序:编写主控制器的程序,用于控制数据采集、数据处理和数据存储。
在程序中实现数据滤波和数字信号处理算法,以获得更准确的振动加速度数据。
b.用户界面:设计一个友好的用户界面,用户可以在界面上选择测量范围、采样频率、数据存储方式等参数。
同时,还可以在用户界面上实时显示振动加速度数据和相关统计信息。
c.数据通信:如果需要将数据传输到计算机或其他设备进行进一步分析,可以设计数据通信模块,如串口通信或无线通信。
基于MEMS加速度计的数字倾角测量仪的设计

零 ; 再 将 AD0BUZY 置 “1”, 启 动 ADC0 转 换 ; 然 后 查 询
AD0INT 是 否 为 “1”,即 查 询 ADC0 是 否 转 换 完 毕 ; 最 后 处 理
ADC0 转换数据。 ADC0 转换只需 16 个时钟周期。 若 ADC0 时
钟 与 系 统 时 钟 相 当 ,则 查 询 实 时 性 比 中 断 实 时 性 高 [6]。
C8051F040 内 部 集 成 有 ADC0、 ADC1 两个 A/D 转换器,ADC0 为 12 位 图 3 系统软件流程 转换精度,ADC1 为 8 位转换精度。该系统采用 ADC0,该转换 器 有 9 个 通 道 ,可 动 态 选 择 模 拟 输 入 量 进 入 A/D 转 换 ,最 高 转换速度可达 100 kB/s。 在转换前,可编程增益放大器 PGA0 对模拟量放大或缩小,以满足实际需要。 ADC0 还有一个可编 程 监 控 模 块 ,当 ADC0 转 换 结 果 符 合 监 控 预 设 值 ,并 且 相 应 中断开启时, 将 引 发相 应 中 断。 ADC0 有 4 种 启 动方 式 :(1) 将 AD0BUZY 位 置 “1”, 启 动 ADC0 转 换 ; (2) T3 溢 出 , 启 动
多 种 量 程 可 供 选 择 , 根 据 设 计 需 求 选 用 量 程 为 ±2 g 的 1221L-002。 加速度计测量倾角的基本原理是:通过测量重力
而 新 兴 的 SoC 型 单 片 机 也 因 其 高 度 集 成 化 的 优 点 得 到 广 泛 应用。 介绍一种基于 MEMS 加速度传感器以及 SoC 型单片机
性价比的 C8051F040。 该单片机是系统控制核心,可完成数据
采集、A/D 转换、角度解算、LCD 显示控制。
基于MEMS加速度计的记录仪
基于MEM S加速度计的记录仪摘要加速度记录仪以Frees cale高集成度三轴加速度传感器MMA8453Q为传感器,以TI 公司低功耗处理MSP430F1611为控制核心,以Flash存储器K9F1G为存储设备。
本系统实现了对三维加速度信号的动态采集,并将加速度信号以文件的形式存储在存储卡中, 便于上位机的读取和进一步分析。
本文阐述的内容有以下几个方面:1)分析了加速度的测试环境,介绍了MEMS加速度计的记录仪的功能要求和性能指标,对系统进行总体设计。
2)在总体方案的基础上对加速度传感器、控制器、存储器进行选型。
3)对系统硬件电路进行设计,包括信号的采集与存储以及异步串行通信接口等几个部分的设计与实现。
4)硬件电路设计与制作好后,需要对其进行编程,以控制主控器对数据的采集和存储的操作。
关键词:MEMS加速度计,MSP430微处理器,Flash,异步串行通信Recorder Based on MEMS accelerometerAbstractAcceleration recorder by Freescale Highly integrated of three-axis acceleration sensor MMA8453Q sensor,with low power consumption TI company MSP430F1611 as the control core, with Flash memory K9F1G for storage devices. This system realizes the 3D acceleration dynamic signal acquisition, and the acceleration signal in the form of files stored in the memory card, easy to read and further analysis of PC.This paper describes the contents of the following aspects:1) Analysis of the acceleration test environment, and describes the functional requirements and performance indicators of the MEMS accelerometer logger, the overall design of the system.2) Acceleration sensors, controllers, memory selection on the basis of the overall program.3) System hardware circuit design, including the design and implementation of the several parts of the signal acquisition and storage as well as asynchronous serial communication interface.4) Hardware circuit design and production need to be programmed to control the operation of the master data collection and storage.Key words:MEMS acceleration sensor, MSP430 microprocessor, Flash, asynchronous serial communication目录1 绪论 (1)1.1 本课题的来源、目的及意义 (1)1.2 加速度计及加速度记录仪的国内外发展状况 (2)1.2.1 MEMS加速度计的原理及应用 (2)1.2.2 加速度记录仪国内外发展状况 (2)1.3 本课题完成的工作及研究内容 (4)2 基于MEMS加速度计的记录仪的总体设计方案 (5)2.1 系统总体结构设计 (5)2.2 系统芯片原理介绍 (5)3 系统硬件设计与实现 (17)3.1 硬件总体结构设计 (17)3.2 加速度信号的采集 (17)3.2.1 I2C总线介绍 (18)3.3 电源管理模块 (19)3.4 复位电路 (20)3.5 外围晶振选择 (21)3.6 存储模块 (22)3.7 异步串行通信模块的设计 (22)3.7.1 异步串行通信介绍 (22)3.7.2 通信接口电路 (23)3.8 电路图 (24)4 系统软件设计与调试问题分析 (25)4.1 应用开发软件概述 (25)4.2 软件设计 (25)4.3 单片机的程序设计 (26)5 总结 (37)附录A 加速度记录仪原理图 (38)附录B 加速度记录仪PCB图 (39)参考文献 (40)致谢 (41)1 绪论1.1 本课题的来源、目的及意义随着工业自动化水平的不断发展,产品质量监测、控制手段已经成为保证产品质量标准不可缺少的环节。
基于MEMS的微型加速度传感器研究
基于MEMS的微型加速度传感器研究在当今科技飞速发展的时代,传感器作为获取信息的关键器件,在众多领域发挥着至关重要的作用。
其中,基于 MEMS(微机电系统)技术的微型加速度传感器凭借其体积小、重量轻、功耗低、集成度高等显著优势,成为了研究的热点。
MEMS 技术的出现为微型加速度传感器的发展带来了革命性的变化。
传统的加速度传感器通常体积较大、成本较高,限制了其在一些对空间和成本敏感的应用中的使用。
而 MEMS 技术通过微加工工艺,能够在微小的硅片上制造出复杂的机械结构和电子线路,从而实现传感器的微型化。
微型加速度传感器的工作原理主要基于惯性原理。
当物体发生加速度运动时,质量块会受到惯性力的作用,从而产生位移或应力的变化。
通过检测这些变化,并经过一系列的信号处理和转换,就能够得到加速度的数值。
常见的检测方式有电容式、压阻式和压电式等。
电容式微型加速度传感器是利用电容的变化来检测质量块的位移。
在这种传感器中,通常有两个平行的极板,其中一个是固定的,另一个与质量块相连。
当加速度作用时,质量块的位移会导致电容值发生变化,通过测量电容的变化就可以得到加速度的信息。
压阻式微型加速度传感器则是基于半导体材料的压阻效应。
当质量块产生位移时,会引起电阻值的变化,通过测量电阻的变化来计算加速度。
压电式微型加速度传感器利用压电材料的压电效应来检测加速度。
当受到应力作用时,压电材料会产生电荷,通过测量电荷的变化来获取加速度的大小。
在 MEMS 微型加速度传感器的设计中,需要考虑众多因素。
首先是结构设计,要确保传感器具有足够的灵敏度和测量范围,同时还要考虑其稳定性和可靠性。
材料的选择也至关重要,需要具备良好的机械性能和电学性能。
此外,制造工艺的精度和一致性对传感器的性能有着直接的影响。
MEMS 微型加速度传感器在众多领域都有着广泛的应用。
在汽车工业中,它们被用于汽车安全系统,如碰撞检测和气囊触发。
在消费电子领域,如智能手机、平板电脑等设备中,用于自动旋转屏幕、运动检测等功能。
基于mems电容式加速度

基于mems电容式加速度
计的应用场景包括:
1. 汽车行驶控制:利用mems电容式加速度计检测汽车运动状态,如加速度和倾角等,可以帮助控制汽车的方向、速度和稳定性。
2. 物体运动跟踪:通过mems电容式加速度计数据可以实现对物体的运动轨迹进行跟踪和分析,例如在体育运动中对运动员的动作进行分析。
3. 移动设备:mems电容式加速度计被广泛应用于移动设备中,如智能手机和平板电脑中的重力感应器,可以帮助设备实现自动旋转屏幕、晃动、震动等功能。
4. 抗震设备:mems电容式加速度计可以用于抗震设备中,通过监测地面的震动,可以触发对建筑物、桥梁等设施的稳定控制。
5. 工业领域:mems电容式加速度计可以用于机器设备中,如对振动、轴向冲击力等进行测量和控制,实现工业设备的稳定运行。
基于MEMS加速度传感器的数字倾角仪设计_沙承贤
段时间进行补偿 , 将 大大延 长测 量仪 的开机 时间, 因 此, 本
文按照下述步骤 对 1221) 05上电稳定特性进行补偿: 1)使用采集电路多次测量某一加速度传感器 在特定 gn
值输入环境下的电压输出 , 采 样时间 一般为 120~ 140 s( 经
验值, 可视具体情况修改 )。
2)选取单次测量 曲线图的时间段 100~ 120 s的数据 求 取平均值作为传 感器的稳 定电压 值 (时 间段 的选取 可视 具 体情况修改 )。
3)选取对应的测量曲线图中 0~ 99 s的时间段, 每 12个
测量数据点求取 一平均值 作为这 一时间段 的值 (采 样点 的 长度可视具体情 况选取 ), 时间 ( t1 ) 以 12个 数据点 的最 后 一个时间点作为 实际时间点。
13 6
传感 器与 微系 统
第 29卷
4)以 ( 2)中所求 取的 稳定 点减去 ( 3) 中所 求取 的数据
90b, 180b, 270b]的电压输出按照如下公式进行计算
K = ( U0 + U90 + U180 + U270 ) /4 ,
(3)
D T = ( U90 - U270 ) /2 ,
(4)
式中 K 为加速度传感器的标度因数; U0, U90, U180, U270为加 速度传感器本身敏感方向 0b, 90b, 180b, 270b的电压输出。
倾角测量有多种 方法, 一般借 助地磁 传感器 或加速 度 传感器 [ 1~ 3]。
地磁传感器容易 受到磁性材料的影响, 如, 钢、铁等, 并 且精度有限, 如, 由 PN I公司生产的 TCM 5在无磁场干 扰的 情况 下由地 磁传感 器提供的 方位角 精度为 ? 0. 3b 。加 速 度传感测量的是有效 重力场变化, 因此, 它不受电磁场的影
基于MEMS技术的加速度传感器研究
基于MEMS技术的加速度传感器研究近年来,随着科技的发展,MEMS(微机电系统)技术在各个领域的应用越来越广泛。
其中,基于MEMS技术的加速度传感器在运动测量、姿态控制、安全监测等方面具有重要的应用价值。
本文将探讨基于MEMS技术的加速度传感器的原理、制备技术以及应用案例。
加速度传感器是一种能够测量物体加速度或者重力的传感器。
MEMS技术结合了微电子技术和微机械技术,使得传感器的尺寸变得非常小,并且能够批量生产。
基于MEMS技术的加速度传感器通常由微机械加速度传感器和集成电路两部分组成。
微机械加速度传感器通常采用质量悬浮结构,当受到外力作用时,质量将发生位移,由此测量加速度。
制备基于MEMS技术的加速度传感器需要经历多个步骤。
首先,通过光刻技术在硅衬底上形成质量悬浮结构。
然后,将金属电极沉积在衬底上,形成电容结构。
接着,通过刻蚀等工艺,雕刻出质量悬浮结构和电容结构。
最后,借助封装技术和集成电路,将传感器制作完整。
基于MEMS技术的加速度传感器具有许多优势。
首先,尺寸小,可以实现微型化和集成化,方便嵌入各类设备。
其次,价格相对较低,适用于大规模应用。
此外,基于MEMS技术制备的加速度传感器具有很高的灵敏度和稳定性,能够精确测量加速度和重力。
基于MEMS技术的加速度传感器在多个领域有广泛的应用。
在运动测量方面,加速度传感器可以用于测量运动物体的加速度和速度,应用于运动跟踪、步数统计等场景。
在姿态控制方面,加速度传感器可以用于测量物体的倾斜角度和旋转角度,应用于飞行器、机器人等设备的姿态控制。
另外,在安全监测方面,加速度传感器可以用于检测物体的碰撞、震动等,应用于汽车碰撞预警、地震预警等领域。
综上所述,基于MEMS技术的加速度传感器具有广泛的应用前景。
由于其尺寸小、灵敏度高和稳定性好等特点,使得加速度传感器在运动测量、姿态控制和安全监测等方面取得了重要的突破。
未来,随着MEMS技术的不断进步和创新,相信基于MEMS技术的加速度传感器将在更多领域发挥重要作用,为人们的生活带来更多便利和安全。
电子水平仪原理
电子水平仪原理
电子水平仪是一种使用电子技术来检测物体是否水平的仪器。
其工作原理主要包括加速度传感器和微处理器的组合。
加速度传感器是电子水平仪中最关键的部分,它通常使用微机电系统(MEMS)技术实现。
这种传感器能够测量物体在三个方向上的加速度,并且将所测得的加速度值转换成相应的电信号。
当物体水平时,加速度传感器测得的加速度值应该在水平面上的方向上为零。
微处理器则负责处理加速度传感器所转换得到的信号。
首先,它会将传感器测得的原始数据进行滤波和校准,以确保测量结果的准确性。
然后,微处理器会根据加速度传感器所测得的加速度值来计算物体的倾斜角度。
一般情况下,水平仪会在数码显示屏上显示当前物体的倾斜角度信息。
通过不断地测量和计算,电子水平仪能够实时地反映出物体是否处于水平状态。
如果物体倾斜超过一定的阈值,电子水平仪通常会通过声音或者光线的方式发出警报,以提醒使用者进行调整。
总结来说,电子水平仪的原理基于加速度传感器和微处理器的组合,通过测量和计算物体的倾斜角度来判断其是否处于水平状态,并通过数码显示屏或警报方式向使用者提供准确的水平信息。
基于MEMS技术的传感器设计及其应用
基于MEMS技术的传感器设计及其应用随着科技的发展,MEMS技术(微机电系统技术)被越来越广泛地应用在传感器领域。
MEMS技术通过微米级的创新解决了大量传感器所具有的问题,如大小、功能和价格。
基于MEMS技术的传感器不仅可以检测机械振荡、气体压力和体积,还可以监测温度、湿度、位置和加速度等状态。
本文将介绍基于MEMS技术的传感器设计及其应用的相关信息。
一、MEMS技术及其优势MEMS技术是利用芯片制造工艺,将机械、电子、光学和磁性等微型功能部件集成在一起的技术。
它具有小尺寸、低功耗、高可靠性和可扩展性等特点。
MEMS 技术的传感器设计不仅能够简化传感器的结构,还可以实现小型化和集成化,从而提高传感器的性能和成本效益。
二、基于MEMS技术的传感器设计1. 加速度传感器加速度传感器是基于MEMS技术设计的最常见传感器之一。
它通过测量加速度来检测物体的运动状态。
加速度传感器通常由微型质量和变化电容器组成。
当物体加速度改变时,质量和电容也会随之改变。
这种变化可以转换成电信号输出。
加速度传感器可以广泛应用于汽车、航空航天、智能手机、电子游戏等领域。
2. 气体传感器气体传感器可用于监测气体的浓度,其设计基于微机电系统技术、纳米技术和光学传感技术等多项技术。
气体传感器通常使用化学反应,将气体与传感器内的反应物发生反应,从而检测气体的浓度。
它们可以广泛应用于环境监测、食品安全检测和医学诊断等领域。
3. 压力传感器基于MEMS技术的压力传感器是利用压力传感芯片操作,可以测量各种压力变化的精度高的传感器。
它们可以作为汽车、航空航天、医疗保健和工业控制等领域的必备组件。
压力传感器可用于测量在机械系统内的压力、温度和流量等参数。
三、基于MEMS技术的传感器应用1. 智能家居在智能家居系统中,MEMS传感器可以帮助监测温度、湿度和光线等条件,从而改善居住环境。
MEMS技术及其设计可以实现远程监控,并优化家庭系统的自动化。
基于MEMS加速度传感器的位移测量系统
基于MEMS加速度传感器的位移测量系统发布时间:2023-03-03T08:28:15.999Z 来源:《中国科技信息》2022年第10月19期作者:褚福彬[导读] 直线滑轨试验台试验结果表明,位移测量系统体积小、可靠性高、精度高褚福彬中国电子科技集团公司第四十九研究所黑龙江省哈尔滨市 150028摘要:直线滑轨试验台试验结果表明,位移测量系统体积小、可靠性高、精度高,而且能准确反映运动载体直线运动状态,在引信定距、车载导航、飞机器惯导、智能电子产品等领域具有广阔的应用前景。
关键词:MEMS加速度传感器;加速度积分;位移测量系统随着MEMS技术的不断发展,MEMS传感器因其高性能、高稳定性、低功耗、体积小等优点,被广泛应用于运动载体姿态测量。
位移测量一般采用雷达测试、光学测试、高速摄影等,随着这些技术的发展,测量精度相对较高,是一种有效的位移测量方法。
然而,对外界工作环境的依赖限制了系统的适应性及智能化水平。
由于加速度是一个易于测量的物理量,利用加速度信号解算位移一直是研究的热点。
一、MEMS加速度传感器MEMS加速度传感器一般由质量块、弹性构件和敏感元件组成,采用最先进的微电子技术及硅微细加工技术制成芯片级尺度的微传感器。
以最典型的MEMS双轴加速度传感器关键元件为传感轴,其传感器原理为:MEMS双轴加速度传感器的关键元件为传感轴,传感轴由两个结构相同、空间位置互为正交的悬臂梁式力敏传感器组成,力敏传感器由应变梁、电阻式应变片、质量块、传感器支架组成,每个应变梁粘贴有四个电阻式应变片,在电气上构成一个惠斯通电桥。
二、系统算法设计系统算法设计基于位移测量控制原理,并针对积分解算误差加入加速度修正算法。
1、测量误差分析:在工程实践中,加速度信号包含环境中各种干扰信号,直接时域积分将产生严重的趋势项误差,趋势项误差来自干扰信号的加速度采集中产生的直流误差项,因此,实际测得的加速度应为通过时域一次积分获得的速度信号及两次积分得到的位移信号分别为采用多项式拟合趋势项方法去除积分中产生的一、二次误差,提高位移测量精度。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2011年 第1期仪表技术与传感器Instrum ent T echn i que and Sensor2011N o 1收稿日期:2010-05-05基于ME M S加速度传感器的数字水平仪于 玮,封维忠,武建军(南京林业大学信息科学技术学院,江苏南京 210037)摘要:介绍了一种基于热对流式加速度传感器的二维高精度数字水平仪的设计方案。
从数学模型入手,推导了倾角测量算法。
采用硬件抑制、软件滤波的方法,最大限度地降低了外界干扰,解决了测量大角度时的零点漂移问题。
研究结果表明:该仪器可以进行多种高精度的倾角测量。
关键词:M E M S;数字水平仪;微控制器;抗干扰中图分类号:TP212.9 文献标识码:A 文章编号:1002-1841(2011)01-0024-03D igital Incli no m eter Based onME M S A ccelerati on SensorYU W e,i FENG W e i zhong,WU Ji an j un(College of Information Sc ien ce and T echnology,N an ji ng Fore stry Un iversity,N an ji ng210037,Ch ina) Abstract:Th is paper descr i bed a desi gn so l ution o f t wo d i m ensiona l and h i gh precision dig ital i nc li no m eter based on ther m al acce lerom eter.Starti ng from m athe m atical mode,l it ca lcu l a ted the a lgo rith m of ang le m easure m ent.Outsi de interference cou l d be m i n i m ized i n the m ethod o f s uppression by ha rd w are and filte ri ng by so ft ware.A nd it so lved the prob l em t hat zero w as dr ifti ng w hen l arge ang l es were measured.R esults show that t he i nstru m ent can be used f o r va ri ous h i gh prec i s i on ang le measure m ent.K ey word s:M E M S;d i g ita l inc li nom eter;M CU;anti ja mm i ng0 引言水平仪作为现代工业不可缺少的检测工具,在土木工程、航空航海、工业控制等领域有着广泛应用[1]。
传统的气泡水平仪误差较大,对于小角度精确测量更是无能为力。
数字水平仪以其方便、快捷、精度高等特点在该领域受到越来越多的关注。
设计响应速度更快、抗干扰能力更强、精度更高的数字水平仪就成为该领域的发展方向。
文中介绍了基于M E M S技术的小型高精度数字水平仪。
1 倾角测量原理M XC62025G是低功耗、双轴加速度传感器芯片,可以在X轴和Y轴2个自由度上测量恒定或者变化的加速度。
其内部加速度传感器部分采用热对流技术,结构如图1所示,正方形硅片的中间有一个热源,四周等间距放置4个热电偶。
当硅片水平放置时,由于四周关于热源的温度梯度是均匀的,所以4个热电偶的温度相同,输出电压相同。
反之,当硅片倾斜时,四周关于热源的温度梯度不均匀,因而输出电压不同[2]。
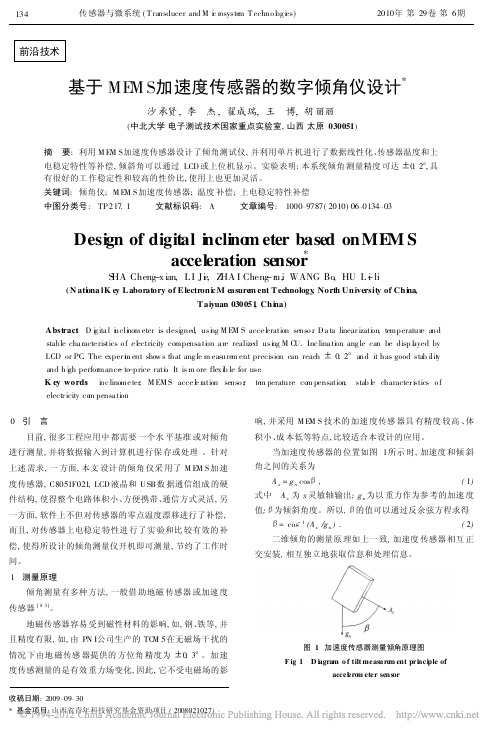
图1 加速度传感器内部结构倾角测量原理如图2所示。
线段OA和OB分别在X轴和Y轴上,且与水平面的夹角分别为 和 .过O点向水平面作垂线OH,再过O点向平面中的直线AB作垂线,交点为C.由几何关系知,传感器所在的平面OA B与水平面的夹角就是OC H[3-4]。
图2 倾角测量的数学模型设 OC H= ,OH=h,则,OA=hsi n,OB=hsin.因为OA OB,所以AB=OA2+OB2=s i n2 +si n2si n sinhOC=OA OBAB=hs i n2 +si n2si n =hOC=s i n2 +si n2所以, =arcsi n sin2 +s i n2即,只要得到2个轴向倾角值就能求出平面真实倾角。
2 仪器设计2 1 硬件电路设计M XC62025G采用I2C接口,量程 2g,在25 、3V的条件下,其灵敏度为512计数点/g.其硬件连接如图3所示,8脚第1期于玮等:基于M E M S 加速度传感器的数字水平仪25上所加的直流电压V DD 在2 7~3 6V 之间,5脚V DD2上的电压标准值为1 8V,但只要低于V DD 上的电压值即可。
由于I 2C 接口是开漏输出,必须接上拉电阻才可输出高电平。
图3 传感器硬件连接图主控器采用AT89C52单片机,由于此单片机没有I 2C 接口,故将其通用I/O 接口P1 0和P1.1模拟成I 2C 接口的S DA和SCL .显示部分采用LCD 显示倾斜角度,同时用发光二极管指示倾斜方向,通讯接口为R S-232标准接口。
系统硬件结构框图如图4所示。
图4 系统结构框图2 2 软件设计程序设计包括I 2C 通信、数据处理、串口通信等内容。
由于M XC62025G 的I 2C 接口工作于快速模式(400K ),所以为配合其传输速率,编程时各语句之间应适时加入NOP 语句以使总线频率小于400k H z .SDA 总线在SCL 脉冲低电平期间准备数据,在SCL 脉冲高电平期间传送数据,其程序流程图如图5所示。
寻址时,向芯片写7位入口地址(0010101),第8位决定数据传输的方向。
传感器芯片的输出数据为8位,先M SB 后LSB 。
通过以下方法合并为16位输出值:datax=(buff[1] 8)|buff[2];datay=(buff[3] 8)|buff[4];注:buff[0]中是内部控制寄存器的值。
由于加速度传感器的输出值只是加载在传感器2个轴上的重力加速度分量对应的计数值,所以要输出倾角还需要进行数据处理。
首先考虑正负输出,因为M XC62025G 无法输出负数值,故通过减去一个固定的偏移量达到正负数值输出的目的。
偏移量取最大输出值与最小输出值之和的一半。
下面考虑轴向加速度分量与倾角间的关系。
假设X 方向的倾角为 ,Y 方向的倾角是 ,则输出信号与倾角大小存在以下关系:X _ca l =g si n Y _ca l =g si n即, =a rcsi n(X _ca l/g )图5 I 2C 程序流程图=arcsi n(Y _cal/g )式中:X _ca l 、Y _cal 分别表示重力加速度在X 轴和Y 轴方向上分量,与倾角(-90 ~90 )的关系曲线如图6所示。
当角度变化不大时,轴向加速度与倾角之间几乎是线性关系,故考虑线性近似。
其关系式可表示为=KX _ca l Y _ca l图6 轴向加速度与倾角间的关系近似曲线(如图6所示)不能同时满足局部最优和全局最优这两个条件。
但只要倾角不是太大,仍可以将误差控制在较小范围内。
线性近似的K 值选取与倾角误差关系如表1所示[5]。
表1 K 值与最大误差的关系倾角大小/( )K /(( ) g -1)最大误差/( )1057 50 0 02 2058 16 0 16 3059 04 0 48 4060 47 1 13综合考虑正负输出和线性近似后,采用以下数据处理方法,得到两个轴向倾角数值。
X_Sen siti vit y=(X_m ax-X_m i n)/2;Y_Sen siti vit y=(Y_m ax-Y_m i n)/2;X_O ffset=(X_m ax+X_m i n)/2;Y_O ffset=(Y_m ax+Y_m i n)/2;X_cal=(datax-X_O ffs et)/X_S ens i ti vity;Y_cal=(datay-Y_O ffs et)/Y_S ens i ti vity;X_Ang l e=K*X_ca;lY_Ang l e=K*Y_ca;l式中:X_m ax、X_m i n分别是X轴的最大、最小输出值;X_Sensiti v ity是X轴灵敏度;X_O ffset是X轴偏移量;X_cal是X轴方向重力加速度分量;X_Ang l e是X轴实际输出角度值;Y轴同理。
串口通信采用RS-232标准,实现单片机与PC机之间的通信。
用V isual C++编写上位机程序,使PC机经串口接收水平仪测量的倾角数值,并将数据以.txt文本形式保存,有利于数据的进一步分析和处理[6]。
3 抗干扰设计加速度传感器的分辨率容易受到外界噪声的影响,系统输出噪声随着测量带宽的改变而改变。
通过滤波处理,降低系统带宽,可以有效降低系统输出噪声,提高系统信噪比。
为了保证水平仪有较高的灵敏度和精确度,需要对系统进行抗干扰设计。
3 1 硬件抗干扰为了防止电源引入外界干扰,需对电源噪声进行抑制。
如图3所示,在电源上并接0 1 F滤波电容,电容摆放时要尽量靠近传感器芯片的电源引脚,并且引线长度要尽可能短。
由于传感器采用的是热对流原理,故在绘制PCB电路时,应避免在传感器芯片附近放置明显热源。
M E M S芯片下方应作覆铜处理,覆铜区接地,其大小与芯片尺寸相当,且在该区域周围的过孔要尽量对称。
3 2 软件抗干扰通过软件滤波的方法可以进一步降低I2C总线上的噪声,提高数据接收的准确性。
文中基于两种思想对数据进行滤波处理。
一方面,当前后两次接收到的测量数据之差的绝对值小于灵敏度(为保险起见,取128counts/g)时,就保留后接收的数据,否则将其抛弃。
程序实现如下:Data Real[0x02];//存放实时加速度传感器数据DataFiltered;//经过滤波后的数据Soft wareF ilter(){if(abs(Data Real[0x00]-Dat aReal[0x01])<0x80)DataFiltered=Data R eal[0x01];Data Real[0x01]=Dat aReal[0x00];}另一方面,利用滑动平均理论,先接收10个数据,再保留它们的算术平均值,可以较好地抑制随机噪声。
4误差分析与方法改进4 1 误差分析对水平仪的性能进行了测试。
将其放置在长为30c m的平板上,平板一端固定,另一端调节高度,刻度从游标卡尺上读出。