《统一建模语言UML》课程介绍
统一建模语言UML教材
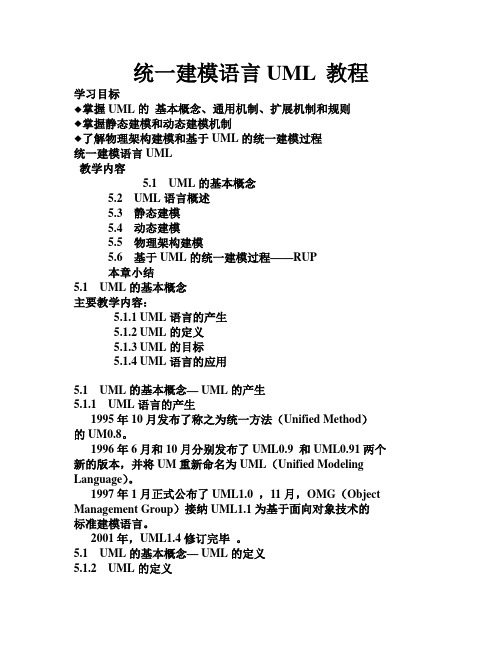
统一建模语言UML 教程学习目标◆掌握UML的基本概念、通用机制、扩展机制和规则◆掌握静态建模和动态建模机制◆了解物理架构建模和基于UML的统一建模过程统一建模语言UML教学内容5.1 UML的基本概念5.2 UML语言概述5.3 静态建模5.4 动态建模5.5 物理架构建模5.6 基于UML的统一建模过程——RUP本章小结5.1 UML的基本概念主要教学内容:5.1.1 UML语言的产生5.1.2 UML的定义5.1.3 UML的目标5.1.4 UML语言的应用5.1 UML的基本概念— UML的产生5.1.1 UML语言的产生1995年10月发布了称之为统一方法(Unified Method)的UM0.8。
1996年6月和10月分别发布了UML0.9 和UML0.91两个新的版本,并将UM重新命名为UML(Unified Modeling Language)。
1997年1月正式公布了UML1.0 ,11月,OMG(Object Management Group)接纳UML1.1为基于面向对象技术的标准建模语言。
2001年,UML1.4修订完毕。
5.1 UML的基本概念— UML的定义5.1.2 UML的定义UML是一种可视化的、用于绘制软件蓝图的标准建模语言。
可以用UML对软件系统的各种制品(包括程序、文档等)进行描述。
UML作为一种语言提供了用于交流的词汇表和使用这些词汇的规则,它由一些符号和一套指示如何使用这些符号的规则构成,可以利用这些明确定义的符号和相应的规则,建立待开发系统的各种模型。
5.1 UML的基本概念— UML的目标5.1.3 UML的目标◆利用面向对象概念为系统建模(不仅仅是编制软件)。
◆易于使用、表达能力强,可以进行可视化建模。
◆与具体的实现无关,应用于任何语言平台和工具平台,创建一种所有人和所有机器都可以使用的建模语言。
◆与具体的过程无关,可普遍应用于软件开发的过程。
uml 统一建模语言

----Ivar Jacobson
1.2 我们的选择?
还是
像他? 像他? 像他? 像他? 掌握方法才能不断的复制成功, 掌握方法才能不断的复制成功,但是技术是基础
1.2 如何解决问题
万能灭蟑螂仪
把蟑螂放到A上 拍击A 抓住蟑螂 把蟑螂放到 上 用B拍击 拍击
1.2 解决问题的难点
如何映射现实世界 如何抽象 抽象的级别
UML的发展历程(续) 的发展历程( 的发展历程
1997.11.17 1997.9公布 公布 公 众 反 馈 1997.1公布 公布 UML 1.1被OMG 被 接纳为标准 UML 1.1
工 业 化
1999.6 UML1.3
UML 1.0
合作伙 伴意见
标 准 化
1996.6和1996.10 UML 0.9&0.91 和 OOPSLA95 Unified Method 0.8 Booch93 OMT-2 其他方法 Booch91 OMT-1 OOSE
4.开发模型-增量模型
主要针对事先不能完整定义需求的软件开 发。用户可以给出待开发系统的核心需求, 并且当看到核心需求实现后,能够有效地 提出反馈,以支持系统的最终设计和实现。 软件开发人员根据用户的需求,首先开发 核心系统。当该核心系统投入运行后,用 户试用之,完成他们的工作,并提出精化 系统、增强系统能力的需求。软件开发人 员根据用户的反馈,实施开发的迭代过程。 第一迭代过程均由需求、设计、编码、测 试、集成等阶段组成,为整个系统增加一 个可定义的、可管理的子集。
UML统一建模语音 统一建模语音
计算机系 孙杰
课程内容
本课程主要的内容包括UML概念、原理, UML静态建模机制、UML动态建模机制、 UML建模工具使用、统一软件开发过程 RUP、使用UML设计建模。 学习UML概念原理,掌握UML静态和动态 建模机制:用例图、类图、时序图、状态 转换图,熟练使用UML建模工具-Rose设 计建模应用软件。
《统一建模语言(UML)》Rational Rose 介绍
Rational Rose 介绍
选择实现语言
J2EE J2SE JDK VB6 VC6 Oracle RUP
Rational Rose IDE 环境
浏览器
四个视图
用例视图
业务模型、用例模型、分析模型
逻辑视图
组件视图 部署视图
正向工程
设置默认语言为Java,Tools->Options->Notation-
>default:选择Java。 设置环境变量ClassPath,Tools->Java/j2ee->Project Specification->ClassPath:具体路径设置为正向工程 生成java文件要保存的目录,一般为项目的src目录。 打开设计好的类图,选中要生成的Java文件的类,然后 通过Tools->Java/J2ee->General Code生成java文件.
逆向工程
点击Tools->Java/J2ee->Reverse
Engineer,调出Java Reverse
Engineer对话框。 添加要进行逆向工程的Java文件,并选中,然后点击Reverse按钮即可。
谢谢观看
3. 组件视图
创建具体的实现模型 包含内容
Package Component Component
diagram
4. 部署视图
创建具体的实现模型 包含内容
Processor Device Deployment
diagram
文档窗口
可以为任何当前 UML元素添加注释、 说明或简单定义等。 导出发布模型时, 这里的文字也会自 动输出。
《UML(统一建模语言)》-John
泛化关系
• 父用例也可以被特别列举为一个或多个子用例。 • 子用例表示父用例的特殊形式。 • 子用例从父用例处继承行为和属性,还可以添加 行为或覆盖、改变继承的行为。
2.2.2 生命线
• 对象的生命线:
2.2.3 消息
• 消息定义的是对象之间某种形式的通信,它可以激发某 个操作、唤起信号或导致目标对象的创建或撤销。
• 消息是两个对象之间的单路通信,从发送方到接收方的 控制信息流。
• 消息可以用于在对象间传递参数。 • 消息可以是信号,也可以是调用。 • 在UML中,消息使用箭头来表示,箭头的类型表示了消
• 一个用例定义一组用例实例
• 简洁:参与者使用系统达到目标
-15-
识别用例
• 识别用例最好的方法就是从分析系统的参与者开始,考 虑每个参与者是如何使用系统的。
• 如何识别用例。
要点:有意义的目标
设定查询条件
会员
选择零件
会员
检索零件
-17-
要点:结果值由系统生成
出纳员
吃饭
系统需要处理的,由系统生成
• 参与者间的泛化关系示 例:
用例
• 外部可见的系统功能单元。 • 在不揭示系统内部构造的前提下定义连贯的行为。 • 不是需求或功能的规格说明,但是也展示和体现其所描
述的过程中的需求情况。
用例
• 用例的名称: ① 简单名 ② 路径名
识别用例
• 关键词:价值 • 定义
• 用例实例是系统执行的一系列动作,这些动作将生成特定参与者 可观测的结果值
• ArgoUML
UML统一建模语言基础知识讲解

如何定义软件对象以及它们之间如何协作,以实现需求。
它是OO(面向对象)方法中一个中间过渡环节,其主要作用 是对OOA分析的结果作进一步的规范化整理,以便能够被OOP (面向对象编程)直接应用。
UML模型图的构成
事物(Things):UML模型中最基本的构成元素,是
具有代表性的成分的抽象
关系(Relationships):关系把事物紧密联系在一起
图(Diagrams ):图是事物和关系的可视化表示
UML事物
UML事物包含4种具体事物: 构件事物: UML模型的静态部分,描述概念或物理元素 构件事物包括以下几种: ※ 类:具有相同属性相同操作 相同关系相同语义的对象的描述
以架构为中心:构架就是各种模型,在整个过程中,需求有需求模型,分析有 分析模型,设计有设计模型,测试有测试模型,这些模型就构成了软件的整体 构架
用例驱动:用例就是我们要开发的这个软件的目标,要确定用户使用这个软件 究竟要干什么,他如何用,用它来促进整个过程。 迭代和增量式开发:在一开始的时候,在了解了整个软件的整体需求后,从中 挑出最重要,最不可缺少的20%左右的需求建立用例模型,然后进行详细分析 ,待这20%需求完成后就会做出一个基本成型的产品,然后再采用用例驱动模 型分析剩余的需求,逐一细化添加到已有的系统中,不断循环往复将所有需求 全部完成,至此一个完整的软件系统开发完毕。
※ 接口:描述元素的外部可见行为,即服务集合的定义说明
※ 协作:描述了一组事物间的相互作用的集合 ※ 用例:代表一个系统或系统的一部分行为,是一组动作序列的集合 ※ 构件:系统中物理存在,可替换的部件
《UML统一建模实用教程》课程教学大纲

《UML统一建模实用教程》课程教学大纲课程简介本课程主要介绍三个部分的知识:1.UML语言的特点、UML语言体系结构、UML组成元素、UML包含的图形种类、UML图的表示方法、UML图的作用、UML的应用领域和建模方法;2.还介绍了RUP统一过程及UML工具----Rational Rose的使用;3.最后以图书管理系统为例子,介绍了系统开发的每个阶段,如何采用UML对系统进行建模。
通过对本书的学习,使学生通过UML语言,运用面向对象的分析方法、和设计方法对系统进行分析和建模。
课程大纲一、课程的性质与任务本课程为计算机专业限选课程,主要介绍统一建模语言UML和面向对象的分析和设计知识。
使学生掌握利用UML工具进行面向对象的分析和设计,在分析和设计中如何进行建模,同时使得学生掌握在Rose环境下用UML分析和设计,学会使用UML建模工具,为系统和科学的软件开发打下良好的基础。
二、课程的目的与基本要求1、掌握UML的元素的语义、语法及其作用;2、掌握UML的表示法和建模方法;3、理解静态建模和动态建模方法及其作用;4、理解体系结构的建模方法和作用;5、掌握绘制各种类型的图,例如类图,用例图,协作图,顺序图等等;6、理解RUP开发模型及其裁剪方法;三、面向专业软件工程;计算机科学与技术四、前导课程:软件工程,面向对象程序设计语言五、本课程与其它课程的联系前导课程是:软件工程和面向对象的程序设计语言。
UML建模语言和软件工程的知识密不可分,面向对象的软件工程中,使用UML语言对系统进行分析和设计,使用面向对象的程序设计语言作为实现语言,因此,还应该具备一定的面向对象程序设计的思想,所以UML的先修课程是软件工程和面向对象的程序设计语言。
六、教学内容安排、学时分配本课程通过课堂教学使学生掌握UML的基本概念,能够使用UML进行面向对象的分析与设计。
理论教学:36学时。
课时分配如下:第一章:UML概述(2学时)1.UML的起源、发展和应用。
统一建模语言UML课程教学大纲

统一建模语言UML课程教学大纲一、课程的性质、任务和目的该课程为计算机专业课,主要介绍面向对象的系统分析和建模语言UML 的基本概念、发展历程、UML语言的特点和使用UML进行系统分析建模的基本过程。
为从事面向对象的软件开发和设计等应用系统的开发奠定一个坚实的基础。
二、课程的基本内容和要求:一UML简介教学任务:1.传统的软件开发方法介绍2.面向对象分析和设计技术3.UML语言的发展和特点教学要求:介绍传统的软件工程开发方法,包括生命周期法和原型法等,同时介绍面向对象分析和设计方法,了解UML作为面向对象方法的国际标准的基本特点和发展历程。
二UML语言概述教学任务:1.UML语言的基本结构2.UML语言模型和图形3.视图、图、模型组织、公共机制、扩展机制4.使用UML建模5.UML支持的工具教学要求:简要介绍UML语言的概念、组成内容和定义方法,以便读者进一步了解UML语言以及正确掌握其方法。
这里的基本内容包括:UML模型、图形、视图、图、模型组织等。
三USE CASE 图教学任务:1.USE CASE图概述2.用例图USE CASE3.活动者和角色4.描述用例5.测试用例6.实现用例教学要求:介绍USE CASE图的基本用法,能够熟练的使用USE CASE图进行问题论域的分析,绘制USE CASE图。
四对象类图和对象图教学任务:1.对象类图2.对象类的关联3.聚合和组合4.泛化和依赖5.对象图与接口6.高级对象类与模板7.对象类图的用法教学要求:介绍对象类图与对象图的表示方法,能够熟练的使用对象类图和对象图表达对象的静态结构和对象之间的关联,掌握高级对象类与模板的特殊用法。
五交互图教学任务:1.顺序图2.协同图3.交互图的应用教学要求:介绍交互图的一般表示方法,能够熟练的使用两种交互图(顺序图和协同图)表示对象之间的消息传递的时间顺序,掌握顺序图和协同图在表达问题的异同。
六状态图1教学任务:1.状态机和状态图2.转移3.并发状态图4.状态图的应用教学要求:介绍状态图一般表示方法,能够熟练的使用状态图表示系统模型的状态变化的动态特征,掌握状态机和状态图的转化关系以及状态图的基本应用。
UML统一建模语言教学大纲
《UML统一建模语言》课程教学大纲一课程说明1.课程基本情况课程名称:UML统一建模语言英文名称:Unified Modeling Language课程编号:2414223开课专业:信息管理与信息系统开课学期:第5学期学分/周学时:3学分/3学时课程类型:专业选修课2.课程性质(本课程在该专业的地位作用)UML统一建模语言是计算机科学与技术、信息管理与信息系统专业的专业选修课。
本课程的任务是通过介绍统一建模语言UML和一些相关的建模知识,使得学生掌握一些软件开发和设计过程中有效的建模知识和方法,同时使得学生掌握在Microsoft Office Visio或Rose环境下用UML分析和设计,学会使用UML 建模工具,为系统和科学的软件开发打下良好的基础。
同时培养学生的分析、设计能力和工程思想。
3.本课程的教学目的和任务。
通过本课程的学习,使学生学习和掌握系统的基本概念和基本理论,了解UML统一建模语言的基本原理和技术,掌握管理UML统一建模语言开发的基本方法和技能;要求学生能读懂软件开发队伍中各个成员绘制的各类UML图,能根据软件需求进行系统分析与设计,并绘制UML图,能将设计模式应用到实际软件开发中,能对不同的设计进行评估和分析。
4.本课程与相关课程的关系、教材体系特点及具体要求习本课程之前,高级程序设计语言、面向对象程序设计。
5.教学时数及课时分配共(总54)二教材及主要参考书1.UML设计及应用,机械工业出版社;赵从军著,2004年版。
2.面向对象分析与设计:UML2.0版,清华大学出版社;[美] Mike O’Docherty著,2006年版。
3.UML与软件建模,清华大学出版社;徐宝文,周毓明,卢红敏著,2006年版。
4.面向对象设计UML实践,清华大学出版社;[美] Mark Priestley 著,2005年版。
三教学方法和教学手段说明本课程包括讲授与实验两部分。
讲授采用课堂教学方法,大部分内容采用大屏幕投影辅助教学。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
《统一建模语言UML》课程介绍
一、课程概况
英文名:Unified Model Language
开课单位:计算机学院
课程编码:203082
学分学时:52学时(含12个实验学时)
授课对象:软件工程专业本科学生
先修课程:《软件工程》、《面向对象分析与设计》
课程目的和主要内容:
本课程以介绍面向对象的统一建模语言UML为主,目的是了解面向对象技术的基本概念,掌握面向对象的分析和设计方法,以及与面向对象技术相关的一些软件开发技术,同时掌握在Rose环境下用UML进行分析和设计的要求。
学会使用UML(Unified Modeling Language)这一建模工具,掌握面向对象建模所必需的描述手段和处理方法,为科学研究中的软件开发工作奠定良好基础;同时培养学生的分析能力、设计能力和工程思想,以提高学生的科学研究素质。
使用教材:《面向对象技术UML教程》,软件工程系列,王少锋编著,清华大学出版社
《统一建模语言UML》教学大纲
二、课程概况
英文名:Unified Model Language
开课单位:计算机学院
课程编码:203082
学分学时:52学时(含12个实验学时)
授课对象:软件工程专业本科学生
先修课程:软件工程、面向对象分析与设计
课程目的和主要内容:本课程以介绍面向对象的统一建模语言UML为主,目的是了解面向对象技术的
基本概念,掌握面向对象的分析和设计方法,以及与面向对象技术相关的一些软件开发技术,同时掌
握在Rose环境下用UML进行分析和设计的要求。
学会使用UML(Unified Modeling Language)这一
建模工具,掌握面向对象建模所必需的描述手段和处理方法,为科学研究中的软件开发工作奠定良好
基础;同时培养学生的分析能力、设计能力和工程思想,以提高学生的科学研究素质。
二、课程内容
第一章(3学时)UML概述
1.1(1学时)UML的历史、特点与构成
1.2(1学时)UML的应用领域
1.3(1学时)支持UML的工具
第二章(3学时)面向对象技术概述
1.1(1学时)软件工程概述
1.2(1学时)控制软件复杂性的基本方法
1.3(1学时)面向对象领域中的基本概念
第三章(6学时)用例和用例图
1.1(1学时)用例、参与者及脚本
1.2(2学时)用例间的关系
1.3(2学时)用例图的构成及实例
第四章(8学时)顺序图和协作图
1.1(2学时)交互图概述及顺序图的构成
1.2(2学时)顺序图中的各种消息
1.3(2学时)协作图的构成及其建立步骤
1.4(1学时)顺序图和协作图的比较及工具支持
第五章(8学时)类图和对象图
1.1(1学时)类的属性及操作
1.2(2学时)类之间的关系
1.3(2学时)派生
1.4(2学时)3种主要的类版型
1.5(1学时)类图和对象图的构成
第六章(8学时)状态图和活动图
1.1(1学时)状态图概述
1.2(3学时)状态图中的基本概念及其支持工具
1.3(3学时)活动图中的基本概念及其支持工具
1.4(1学时)状态图和活动图两者比较
第七章(6学时)构件图和部署图
1.1(1学时)构件和构件图的概念及作用
1.2(2学时)支持构建图的工具
1.3(1学时)部署图和部署图中的概念
1.4(2学时)支持部署图的工具
实验(12学时)
1.安装及使用UML开发工具Rational Rose 2003和Microsoft的Visio 2003
2.使用开发工具绘制项目案例中所涉及的用例图、顺序图、协作图
3.使用开发工具绘制项目案例中所涉及的类图、对象图、状态图、活动图、构件图、部署图4.按照软件开发流程绘制图书借阅系统中的各种图例。
三、附录
参考教材:《面向对象技术UML教程》,软件工程系列,王少锋编著,清华大学出版社
参考和阅读书目:
1.UML与Rational Rose 2002从入门到精通,邱仲潘等译,电子工业出版社,2002
2.UML和模式应用-面向对象分析与设计导论,姚淑珍等译,机械工业出版社,2002
3.UML系统分析设计与应用案例,冀振燕编著,人民邮电出版社,2003
教学大纲编者:赵岚
《统一建模语言UML》实验教学大纲
——适用软件工程及相关专业
编写人:赵岚编写时间:2005年12月
审核人:
校核人:
课程名称:《统一建模语言UML》实验
英文名称:Unified Model Language
学时: 12学时
学分:2
课程性质:必修
先修课程:软件工程、面向对象分析与设计
适用专业:计算机应用及相关专业
一、实验课程的性质、目的和任务
《统一建模语言UML》实验是《统一建模语言UML》课程的辅助教学内容,其教学的目的是通过实际操作,使学生熟悉面向对象相关技术的一些软件开发的理论、方法、技术、标准以及计算机辅助工具和环境,系统地掌握掌握在Rose环境下用UML进行分析和设计的要求。
学会使用UML(Unified Modeling Language)这一建模工具。
统一建模语言实验安排五个独立的小实验,让学生加深对系统建模理论和方法的理解,巩固课本知识,学会综合地应用面向对象分析与设计方法的知识进行分析、设计、开发系统,及用辅助工具对系统进行完整建模。
二、学习本实验课程学生应掌握的前设课程知识
本实验课程的先行课程有:《软件工程导论》、《面向对象分析与设计》。
三、实验内容及学时分配
四、考核方式及成绩评定方法
实验考勤占30%,实验报告占70%、
实验总评成绩将以20%的比例计入该门课程的总成绩中。
五、教材及主要参考书
教材:《面向对象技术UML教程》,软件工程系列,王少锋编著,清华大学出版社
参考书:
1.UML与Rational Rose 2002从入门到精通,邱仲潘等译,电子工业出版社,2002 2.UML和模式应用-面向对象分析与设计导论,姚淑珍等译,机械工业出版社,2002 3.UML系统分析设计与应用案例,冀振燕编著,人民邮电出版社,2003。