标准工时分析表(MOD法)1
MOD&实测插件标准工时
M3G3 M3P0 E2D3 R2P5 M3G1 M3P0 E2D3 R2P5A4 M3G3 M3P0 E2D3 R2P5A4 M3G3 M3P0 E2D3P2 M2P5 M3G3 M3P0 E2D3P2 M2P5 M3G3 M3P0 E2D3 R2P5A4 M3G3 M3P0 E2D3 R2P5A4 M3G3 M3P0 P5
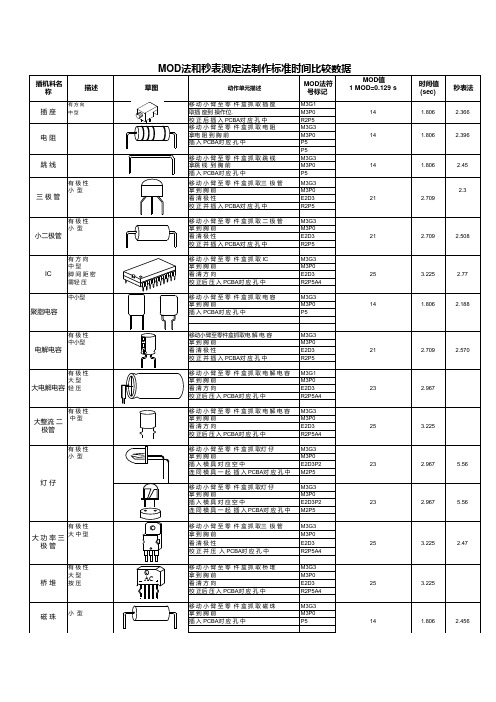
插机料名 称 描述 草图
动作单元描述 移 动 小 臂 至 零 件 盒 抓 取晶 体 中小型 拿到胸前 插 入 PCBA对 应 孔 中
MOD法符 号标记
M3G3 M3P0 P5
MOD值 1 MOD=0.129 s
时间值 (sec)
秒表法
晶体
14
1.806
有方向 大中型
移 动 小 臂 至 零 件 盒 抓 取插 座 拿到胸前 看清方向 校 正后 压 入 PCBA对 应 孔 中 移 动 小 臂 至 零 件 盒 抓 取插 座 拿到胸前 看清方向 校 正后 压 入 PCBA对 应 孔 中
M3G3 M3P0 E2D3 R2P5A4 M3G3 M3P0 E2D3 R2P5A4 M3G3 M3P0 E2D3 R2P5 M3G3 M3P0 E2D3 R2P5A4 M3G3 M3P0 E2D3 R2P5 M3G3 M3P0 E2D3 R2P5 M3G3 M3P0 P5
25
3.225
插座
25
3.225
1.806
秒表法
插座
中型
14
2.366
电阻
14
1.806
2.396
跳线
有极性 小 型
14
1.806
2.45
三极管
移 动 小 臂 至 零 件 盒 抓 取三 极 管 拿到胸前 看清极性 校 正 并 插 入 PCBA对 应 孔 中 移动小臂至零 件盒抓取二极管 拿到胸前 看清极性 校 正 并 插 入 PCBA对 应 孔 中 移 动 小 臂 至 零 件 盒 抓 取 IC 拿到胸前 看清方向 校 正后 压 入 PCBA对 应 孔 中 移动小臂至零 件盒抓取电容 拿到胸前 插 入 PCBA对 应 孔 中
标准工时的定义计算MOD法课件

标准工时的作用
01
帮助企业合理安排生产计划,预测生产能力,确保 生产进度。
02
用于评估和比较不同工作岗位的工作效率,优化人 力资源配置。
03
为制定生产标准、作业指导书和工艺流程提供依据 。
标准工时的制定流程
收集数据
收集有关作业时间、操作频率 、停滞时间等数据。
制定标准
根据分析结果,制定标准工时 ,并考虑作业的难易程度、工 作条件等因素。
案例三:某零售企业的标准工时计算
总结词
需考虑门店地理位置、客流量和员工技能水平
详细描述
在计算零售企业的标准工时时,需将门店地理位置、客 流量和员工技能水平等因素纳入考虑范畴。通过对这些 因素的综合分析,制定出符合实际运营情况的标准工时 。此外,还需定期对标准工时进行评估和调整,以确保 其合理性和有效性。
VS
这种方法通常由时间研究专家进行, 他们会实地观察员工执行任务,并使 用计时器记录完成任务所需的时间。 这种方法得出的工时数据比较准确, 但需要投入大量时间和人力。
预定动作时间研究法
定义:预定动作时间研究法是一种基于动作分析,对完成某项任务所需的时间进 行预测的方法。
这种方法首先对任务进行动作分解,然后根据每个动作的预估时间,计算出完成 整个任务所需的总时间。这种方法可以在没有实际观测的情况下得出工时数据, 但需要具备一定的动作分析基础。
确定作业内容
明确作业范围、工作内容和操 作步骤。
分析数据
对收集的数据进行分析,确定 正常作业速率和异常因素。
验证与调整
在实际生产中验证标准工时的 适用性,并根据实际情况进行 调整和完善。
02 标准工时的计算方法
直接时间研究法
定义:直接时间研究法是一种通过观 察和计时,对完成某项任务所需的时 间进行直接测量的方法法的优点包括
MOD法分析规范标准时间
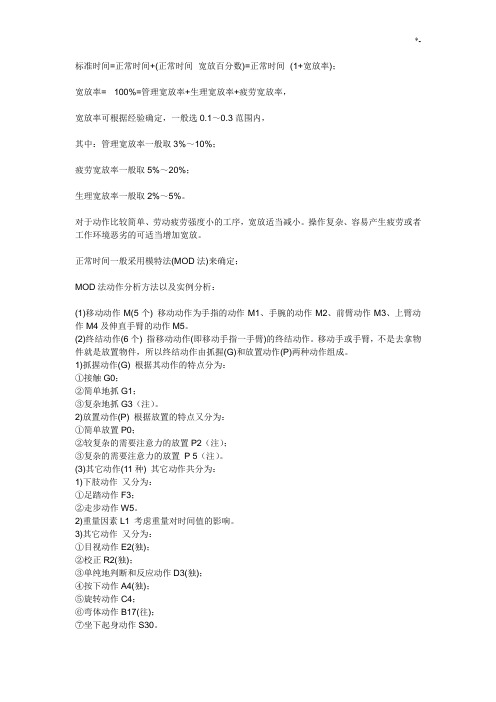
标准时间=正常时间+(正常时间×宽放百分数)=正常时间×(1+宽放率);宽放率= ×100%=管理宽放率+生理宽放率+疲劳宽放率,宽放率可根据经验确定,一般选0.1~0.3范围内,其中:管理宽放率一般取3%~10%;疲劳宽放率一般取5%~20%;生理宽放率一般取2%~5%。
对于动作比较简单、劳动疲劳强度小的工序,宽放适当减小。
操作复杂、容易产生疲劳或者工作环境恶劣的可适当增加宽放。
正常时间一般采用模特法(MOD法)来确定;MOD法动作分析方法以及实例分析:(1)移动动作M(5个) 移动动作为手指的动作M1、手腕的动作M2、前臂动作M3、上臂动作M4及伸直手臂的动作M5。
(2)终结动作(6个) 指移动动作(即移动手指一手臂)的终结动作。
移动手或手臂,不是去拿物件就是放置物件,所以终结动作由抓握(G)和放置动作(P)两种动作组成。
1)抓握动作(G) 根据其动作的特点分为:①接触G0;②简单地抓G1;③复杂地抓G3(注)。
2)放置动作(P) 根据放置的特点又分为:①简单放置P0;②较复杂的需要注意力的放置P2(注);③复杂的需要注意力的放置P 5(注)。
(3)其它动作(11种) 其它动作共分为:1)下肢动作又分为:①足踏动作F3;②走步动作W5。
2)重量因素L1 考虑重量对时间值的影响。
3)其它动作又分为:①目视动作E2(独);②校正R2(独);③单纯地判断和反应动作D3(独);④按下动作A4(独);⑤旋转动作C4;⑥弯体动作B17(往);⑦坐下起身动作S30。
4.模特法的动作分析(1)基本动作——上肢动作1)移动动作(M) 移动动作包括5种,分别以手指、手和手臂进行作业来区分。
①手指动作M1 表示用手指的第三个关节前的部分进行的动作,每动作一次时间值为1MOD,相当于手指移动了2.5cm的距离。
②手的动作M2 用腕关节以前的部分进行的动作,当然也包括了手指的动作,每进行一次为2MOD,相当于动作距离为5cm左右。
标准工时分析表(MOD法)1
(1) 所有由人进行的作业,均是共通的基本动作组成的,模特法将实际生产作业中的人体动作归纳为21种. (2) 不同的人做同一动作(在作业条件相同的情况下)所需时间基本相等.
(3) 人体不同部位的动作,所用时间值是相互成比例的,如手的动作时间是手指动作时间的2倍,小臂的动作 时间是手指动作时间的3倍,由此就可以定义手指一次动作时间为人体动作的基本单位时间,同时其它动 作与之成倍数关系计算求得.
开盒拉出编带装入成型机
每编带500PCS
校正后摇动机器成型 移动上身移动小臂至零件盒抓取物料 拿到胸前
开盒拉出编带装入成型机
每编带1000PCS
校正后按开关开动机器成型 移动上身移动小臂至零件盒抓取物料 拿到胸前
开盒拉出编带装入成型机
每编带1000PCS
校正后摇动机器成型
机械自动成型
编带500PCS
M3G3 M3P0 R2P5
机械自动成型
移动小臂至零 件盒抓取陶瓷电容 拿到胸前 校正后插入治具并成型 取下桥堆放入物料盒中 移动小臂至零 件盒抓取陶瓷电容 拿到胸前 校正后插入治具并成型 取下桥堆放入物料盒中 移动小臂至零 件盒抓取陶瓷电容 拿陶 瓷 电 容 到 胸 前 校正后插入治具并成型 取下桥堆放入物料盒中
散热片缠黄胶
移动小臂至零 件盒抓取电解电容 拿到胸前 看清方向 校正后夹入治具并弯脚 取下电容放入物料盒中 移动小臂至零 件盒抓取电解电容 拿到胸前 看清方向 校正后夹入治具并弯脚 将电容放入物料盒中 移动小臂至零 件盒抓取电解电容 拿到胸前 校 正 后 夹 入 治 具 并 打KIN脚 取下电容放入物料盒中 移 动 小 臂 至 零 件 盒 抓 取灯 仔 拿到胸前 校正后夹入治具并切脚 移 动 小 臂 至 零 件 盒 抓 取灯 仔 拿到胸前 看清方向 校正后夹入治具并弯脚 取下灯仔放入物料盒中 移 动 小 臂 至 零 件 盒 抓 取三 极 管 拿到胸前 看清极性 校正后取下管塞并放入 成型机 将物料装入静电带中 将物料转入物料盒中 移 动 小 臂 至 零 件 盒 抓 取三 极 管 拿到胸前 看清极性 校正后夹入治具并成型 取下桥堆放入物料盒中 移动小臂至零 件盒抓取桥堆 拿到胸前 看清方向 校正后夹入治具并成型 取下桥堆放入物料盒中 移动上身移动小臂至零件盒抓取物料 拿到胸前
标准工时

动作要素常用的是方法:一是:经验方法;二是:秒表测时法三是:MOD分析法:四是:作业标准法;由于公司之前所用的排拉表及SOP较粗略,而多次现场用秒表法测时因得不到员工的正确认识,无法真实顺利进行,故在此仅以MOD法作详细说明。
MOD法是以操作的基本动素为基础的分析,加以科学计算得出的标准工时。
换算单位:1MOD=0.129s,在具体场合可以适当放大。
基本动作1 手的动作M1 3 小臂的动作M3 5 伸直的臂的动作M52 手腕的动作M2 4 大臂的动作M4终结动作1 触摸抓取G0用手推工件,用手/手指取接触目的手的动作,没有抓取意图。
2 简单抓取G1在自然放松状态下用手/手指抓取工件,被抓物件附近有障碍物。
3 复杂抓取G3需要注意力,在抓取时有迟疑,或周围有障碍物,或物体小而滑不易抓取。
4 简单放置P0把抓着的物体移到目的地直接放下,没有范围要求,也没有其他要求。
5 需要注意力的放置P2需要用眼睛判断以决定物体的放置。
6 需要注意力的复杂放置P5将物体放置在规定位置,或进行配合动作,从始至终都需要眼看着其精确位置。
反射动作不是每次都需要注意力,或保持特别注意力的反复出现的动作。
反射动作时间为1/2MOD,手的为1MOD,小臂的为2MOD,大臂的为3MOD。
其他动作1 脚踏动作F32 步行动作W53 身体弯曲动作B17 从站立、蹲下,单膝触地,回复到原状的一个周期的动作。
4 站起业再坐下的动作S30 坐在椅子上站起来,再坐下的动作,包括推、拉座椅的动作。
5 重量因素L0:≦2KG L1:2~6KG 2×L1:6~10KG以后每增加4KG,其时间值增加1MOD。
单手负重有效重量等于实际重量,双手负重有效重量等于实际生理的1/2。
6 目视动作E2 为了看清物件而调整焦距或移动视线的独立动作。
所谓独立动作就是做这个动作时其他动作都停止。
7 矫正动作R2 抓取零件或工具、或将其回转、或改变方向的动作。
基于MOD法动作分析的标准作业方法及标准工时实例

测量与分析 何开文 杨永伟
开 始 时 间:2010-5-25 计划完成时间:2010-7-25
主要内容
一、通过逐工序、逐员工观察、秒表测量及录像,进行动作分析,找 到规范、标准、节省、高效的作业(动作)组合—标准作业组合;
二、测量基于标准作业组合的(核心作业内容)标准工时;
经逐个观察及询问了解,发现影响效率的主要问题有三点:
1、作业方法:有单个上夹具(作业指导书要求)和一次性拿 5PCS电芯上夹具;
2、双手同时作业:拿电芯、整理台面电芯、换夹双手作业; 3、效率意识:在等夹具或待料时,准备好要上夹具的电芯、
挑注液孔方向不一致的电芯,调整一致等。
二次注液上夹具方法对比
②H
⑧ P2 ⑥ P2
③ M3
⑿ P2 ⑩ P2
① M3
② G1
标准工时=29 MOD*0.129=3.741秒
快速工时=29 MOD*0.12 =3.48秒
慢速工时=29 MOD*0.143=4.147秒
备注
实际时间=3.36秒(秒表、录像监测)
1、仅右手作业,上一组电芯过程右手无浪费动作;
动作组合5-转夹具
动作组合1—换夹具
左手动作
右手动作
NO.
分解动作描述
MOD表达式 模特数 MOD表达式 右手(动作描述)
1 推出上完的夹具,取空夹具 M4M4G0M4P0 12 G0M4
辅助推出上完的夹具
③G0
④M4
②M4 ②
⑤P0 ①M4
M4 ① G0
标准工时=12 MOD*0.129=1.548秒 快速工时=12 MOD*0.12 =1.44秒 慢速工时=12 MOD*0.143=1.608秒 实测时间=1.44秒(秒表、录像监测)
动作分析表(MOD)

动作分析 工序作业分析 右手动作 工时1 工时2 MOD1 MOD2 (S) (S) 1.161 0.645 1.032 0.387 9 5 6 8 3 4 8 5 2 0.645 0.516 4.386 取主板 持住 持住 A002 组装摄像头 (Socket) 持住 持住 持住 流入下一站 取主板 将主板移至扫描枪 A003 Check In (扫描条形码) 持住 流入下一站 取主板 持住 A004 贴防水标签 (1Pcs) 持住 持住 流入下一站 取主板 持住 持住 A005 组装LCM (BTB) 持住 持住 持住 主板放置桌面 取主板 持住 持住 持住 持住 A006 组装LCM (ZIF) 持住 M4G1M4P0 H H H H H M4P0 M4G1M4P0 M3P2 H H M4P0 M4G1M4P0 H H H M4P0 M4G1M4P0 H H H H H M4P0 M4G1M4P0 H H H H 0.516 1.677 1.161 4 13 9 4 8 8 5 42 5.418 BD 0.516 M3G3 1.032 M3P5 1.032 (M2P2)*2 0.645 E2D3 延迟 取LCM LCM对齐至主板 LCM组装至主板 检查组装状况 → → ○ ○ ◇ 1.032 1.032 0.645 0.516 1.677 1.161 4 13 9 4 8 8 12 10 17 2.193 BD 0.516 M3G3 1.032 M3P5 1.032 (M2P2)*2 1.548 M2G3M2P5 1.29 (E2D3)*2 BD 延迟 取LCM LCM对齐至主板 LCM组装至主板 组Connector至主板 检查组装状况 延迟 → → ○ ○ ○ ◇ → 0.516 3.612 2.193 1.161 0.516 1.29 1.032 1.032 1.548 1.29 0.516 2.322 1.161 4 18 9 5 7 5 9 1.161 H 0.645 M3G1M1P0 0.903 M3P2M2P0 0.645 E2D3 BD 持住镊子 取防水标签 贴至主板 检查粘贴状况 延迟 → → ○ ○ → 0.903 0.645 0.516 1.548 2.322 1.161 0.516 0 0.516 1.677 1.161 0.645 4 13 9 5 4 5 36 4.644 H H 0.516 M3G1 0.645 M3P2 BD 延迟 延迟 取SN Label SN Label贴至主板 延迟 → → → ○ → 0.645 0.516 0.645 3.838 1.161 0.645 0 1.161 5 10 4 34 9 4 8 6 8 10 35 4.515 BD 0.516 M3G3 1.032 M3P5 0.774 M2G0A4 1.032 M2G3M3P0 1.29 (E2D3)*2 BD 延迟 取Camera 组装Camera至Socket 撕下Camera保护膜 检查组装状况 延迟 → → ○ ○ ◇ → 0.516 3.838 2.193 1.161 1.645 0.516 1.29 1.032 1.774 1.032 1.29 1.29 H H 0.774 F3*2 H 0.516 M3G1 1.032 M3P5 0.645 M3G0M2P0 0.258 M2P0 H (E2D3)*2 H 标记符号 动作描述 持住镊子 持住镊子 踩踏开关 持住镊子 取Metal Dome 压下治具把手 打开治具把手 持住镊子 检查粘贴状况 持住镊子 动作 分类 → → ○ → → 1.032 0.645 0.258 0.645 1.29 0.516 2.064 5.16 1.161 0.516 1.29 → ○ → ◇ → 0.774 1.032 0.516 加工 ○ 移动 → 1.161 0.645 品检 ◇ 作业时间 MOD 标准作业时间 正常时间 标准 宽放率(%) (S) 时间(S) 工时(S) 工时(S) 机或UT
MOD法工时分析表讲课教案
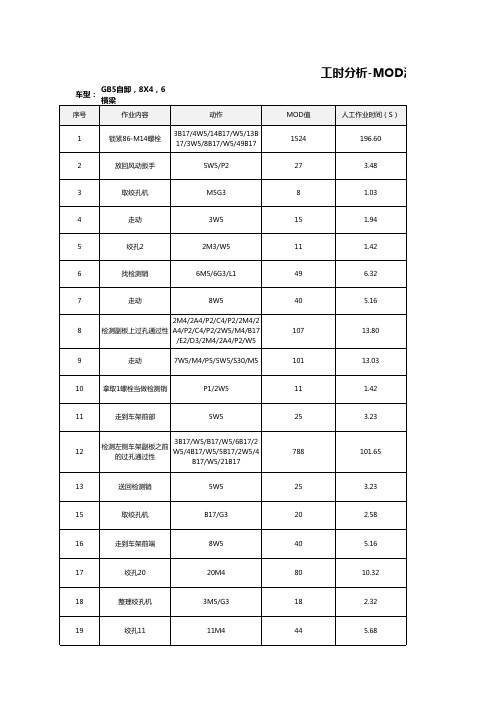
析-MOD法
工位: CB05-01L锁紧左侧 M14螺栓、检测孔
设备时间(S)
总作业时间(S) 标准作业时间(S)
165.30
361.90
383.61
0.00
3.48
3.69
Timer pro 工时 354.21
备注
设备时 间为: 气枪拧
4.18
0.00
1.03
1.09
1.08
0.00
1.94
2.05
101.65
3.23 2.58 5.16 10.32 2.32 5.68
20
Байду номын сангаас取1螺栓(去)
21
回到车架处
22
复检孔的通过性
23
放回螺栓(去)
4W5/G3 5W5 2M4
5W5/P0
统计分析
动素符号 B17 W5
说明:
1、 1MOD=0. 129S;
2、标准工 时宽放率 为6%; 3、MOD 法计算标 准工时 时,无法 计算设备 时间,例 如:气枪 拧紧螺栓 4、3B17 表示:3次 弯腰; 4W5表 示:行走4 步;
结论: 1、MOD 法2、与MTOimDer 法适用于 动作改善 分析,不 利于用于 我司的标 准工时测
次数 133 84
23 25 8 25 Total
工时 291.669
54.18
2.97 3.23 1.03 3.23 388.81
占比 75% 14%
3、B17、 W5出现次 数较多, 占比高, 此类动素 属于高级 动素,易 让员工产 生疲劳;
2.00
设备时
8.21
9.63
10.21
10.91
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
5. 本公司MOD法制定标准工时基准如下:
(1)以MOD分析之正常时间(即100%效率水准).
(2)本细则规定之标准作业距离为20CM.
(3)私事宽放:因本厂采取中休制度,故宽放率为0%.
(4)疲劳宽放:因本厂作业强度属轻、中度作业,故取宽放标准为5%.
(5)作业宽放:如,a.台及场地的简单清洁与准备,包括转换产品品种时的时间消耗.
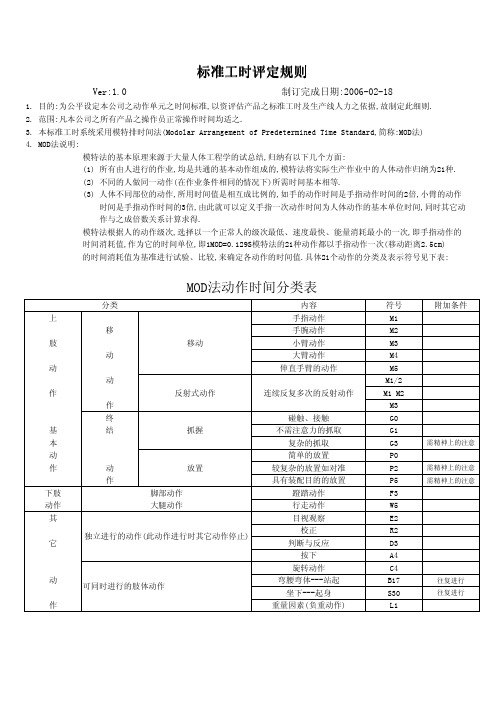
模特法根据人的动作级次,选择以一个正常人的级次最低、速度最快、能量消耗最小的一次,即手指动作的 时间消耗值,作为它的时间单位,即1MOD=0.129S模特法的21种动作都以手指动作一次(移动距离2.5cm) 的时间消耗值为基准进行试验、比较,来确定各动作的时间值.具体21个动作的分类及表示符号见下表:
SEC
5.56
SEC
零件名称 插座
描述
电阻
立式电阻
立式二极管
跳线
有极性
整 流 二极 中 型 管
有极性
三极管 小 型
有极性 小型
小二极管
草圖
MOD法制作各模组标准工时
动作单元描述
移动小臂至零 件盒抓取插座 取插 座到 操作位. 校 正 后 插 入 PCBA对 应 孔 中 移动小臂至零 件盒抓取电阻 拿电 阻 到 胸 前 插 入 PCBA对 应 孔 中
标准工时评定规则
Ver:1.0
制订完成日期:2006-02-18
1. 目的:为公平设定本公司之动作单元之时间标准,以资评估产品之标准工时及生产线人力之依据,故制定此细则.
2. 范围:凡本公司之所有产品之操作员正常操作时间均适之.
3. 本标准工时系统采用模特排时间法(Modolar Arrangement of Predetermined Time Standard,简称:MOD法) 4. MOD法说明:
55
7.10
59
7.61
17
2.19
33
4.26
1.06
0.14
UT=25"
0.50
31
4.00
31
4.00
0.038
0.00
UT=180"
0.18
0.038
0.00
UT=240"
0.24
8.51
9.13
2.63 5.11
0.16 0.16+0.5 Ts=0.66
4.80
4.80 0.01 0.18+0.01 Ts=0.19 0.01 0.24+0.01
复杂的抓取 简单的放置 较复杂的放置如对准 具有装配目的的放置
蹬踏动作 行走动作 目视观察
校正 判断与反应
按下 旋转动作 弯腰弯体---站起 坐下---起身 重量因素(负重动作)
符号 M1 M2 M3 M4 M5 M1/2 M1 M2 M3 G0 G1 G3 P0 P2 P5 F3 W5 E2 R2 D3 A4 C4 B17 S30 L1
R2P5+UT M3G1 M3P0 E2D3 R2P5 M5M4E2D3R2 M3G1M4P5 M3G3 M3P0 R2P5A4F3 M2M3P0 M2G3 M2P0 R2P5A4F3 M2M2P0
M2G3 M2P0 R2P5A4F3 M2M2P0 M2G3 M2P0 R2P5A4F3 M2M2P0 M2G3 M2P0 R2P5A4F3 M2M2P0
转动上身移动小臂拿取三极管编带 拿到胸前
打开盒子取出编带放入治具上
校正并拉动编带成型
装好三极管放入物料筐
移 动 小 臂 至 零 件 盒 抓 取热敏电阻 拿到胸前 校正后插入治具并成型 取下桥堆放入物料盒中 移动小臂至零件盒抓取电 解 电 容 拿到胸前 校正并插入治具对应孔中 踩下开关成型 取下电容放入物料盒中 移动小臂至零 件盒抓取电解电容 拿到胸前 校正后夹入治具并切脚 将电容放入物料盒中
移动小臂至零 件盒抓取电解电容 拿到胸前 看清方向 校正后夹入治具并弯脚 取下电容放入物料盒中 移动小臂至零 件盒抓取电解电容 拿到胸前 看清方向 校正后夹入治具并弯脚 将电容放入物料盒中 移动小臂至零 件盒抓取电解电容 拿到胸前 校 正 后 夹 入 治 具 并 打KIN脚 取下电容放入物料盒中 移 动 小 臂 至 零 件 盒 抓 取灯 仔 拿到胸前 校正后夹入治具并切脚 移 动 小 臂 至 零 件 盒 抓 取灯 仔 拿到胸前 看清方向 校正后夹入治具并弯脚 取下灯仔放入物料盒中 移 动 小 臂 至 零 件 盒 抓 取三 极 管 拿到胸前 看清极性 校正后取下管塞并放入 成型机 将物料装入静电带中 将物料转入物料盒中 移 动 小 臂 至 零 件 盒 抓 取三 极 管 拿到胸前 看清极性 校正后夹入治具并成型 取下桥堆放入物料盒中 移动小臂至零 件盒抓取桥堆 拿到胸前 看清方向 校正后夹入治具并成型 取下桥堆放入物料盒中 移动上身移动小臂至零件盒抓取物料 拿到胸前
设计或工作环境等有异常时,得酌情修正.
零件名称
描述
插 座 气动成型
电阻
手摇成型机 有极性 中型
自动成型
立式电阻 小 型
立式二极管 手摇成型机
跳 线 自动成型
自动切脚机
三极管 小 型
聚脂电容 气动成型机
中小型
气动成型机
电解电容 中小型
自动切脚机
MOD法制作各模组标准工时
草圖
动作单元描述
移动小臂至零 件盒抓取插座 取 插 座 到 操 作 位. 校正后放入治具中 按下开关成型 取下插座放入物料盒 移动上身移动小臂至零件盒抓取物料 拿到胸前
开盒拉出编带装入成型机
校正后摇动机器成型 移动上身移动小臂至零件盒抓取物料 拿到胸前
开盒拉出编带装入成型机
晶体自动成型机 中小型晶体气动成型机 中小型
热敏电阻 气动成型机
小型
套管成型 自动成型机
陶瓷电容
气动成型机
中小型
多層电容 气动成型机
中小型
每编带1000PCS 管装50PCS
校正后摇动机器成型 移 动 小 臂 至 零 件 盒 抓 取晶 体 拿到胸前 看清方向 校正后夹入治具并成型 将物料装入静电带中 将物料转入物料盒中 移 动 小 臂 至 零 件 盒 抓 取晶 体 拿到胸前 校正后夹入治具并成型 取下桥堆放入物料盒中 移 动 小 臂 至 零 件 盒 抓 取热敏电阻 拿到胸前 校正后插入治具并成型 取下桥堆放入物料盒中
有极性
大电解电容 大 中 型
气动成型机
LED
自动切脚机 小型 气动成型机
自动切脚机
大功率三 有极性 极管 大中型
大 功 率 三 气动成型机 极管 有极性
大中型
桥堆
气动成型机 大型
电阻,二极 手摇成型机
管等
小型
电阻,二极 手摇成型机 管,保险丝 小 型
等
直脚 KIN脚
管装50PCS
AC
每编带1000PCS
M3G3 M3P0 R2P5
附加条件
需精神上的注意 需精神上的注意 需精神上的注意
往复进行 往复进行
附加因素
非动作时间:
NO
名称
符号
内容
例
表示一只手进行动作,另一只手处于停止状态,
1
延时
BD
不给予时间
右手M 左手BD
2
保持
H
表示用手拿着或抓着物体一直不动的状态,主
要指扶持与固定的动作,不给时间
左手H 右手P2
指人的动作以外,机械或其它工艺要求发生的,
插件焊锡时
3
有效时间
TU
非动作产生的因有附加时间,需要准确测时.如
的执锡时间UT
机械的工作时间、焊锡、铆接、测试、涂布等
或仪表测试时间
由上表知,MOD法把人的动作分成上肢、下肢、其它等动作,分别由符号M、G、P、F、W……代表,符号后仅赋予数字1、2、3
……代表模特时间值,如M1代表1MOD=0.129SEC,M2即代表2MOD、以此类推.
模特法的基本原理来源于大量人体工程学的试总结,归纳有以下几个方面:
(1) 所有由人进行的作业,均是共通的基本动作组成的,模特法将实际生产作业中的人体动作归纳为21种. (2) 不同的人做同一动作(在作业条件相同的情况下)所需时间基本相等.
(3) 人体不同部位的动作,所用时间值是相互成比例的,如手的动作时间是手指动作时间的2倍,小臂的动作 时间是手指动作时间的3倍,由此就可以定义手指一次动作时间为人体动作的基本单位时间,同时其它动 作与之成倍数关系计算求得.
开盒拉出编带装入成型机
每编带500PCS
校正后摇动机器成型 移动上身移动小臂至零件盒抓取物料 拿到胸前
开盒拉出编带装入成型机
每编带1000PCS
校正后按开关开动机器成型 移动上身移动小臂至零件盒抓取物料 拿到胸前
开盒拉出编带装入成型机
每编带1000PCS
校正后摇动机器成型
机械自动成型
编带500PCS
标准工时
MOD法符号标记 MOD值
M3G1 M3 E2D3R2P5 M2P2 M2G1M3P0 M5G1 M5P0 M2G3M2M2G3 M3P5 R2P5+UT M5G1 M5P0 M2G3M2M2G3 M3P5 R2P5M4A4+UT M5G1 M5P0 M2G3M2M2G3 M3P5 R2P5+UT
MOD法符 号标记
M3G1 M3P0 E2D3R2P5 M3G3 M3P0 P5
MOD值
19 14
時間值 (sec)
2.45
1.81
标准时间
2.94 2.17
移动小臂至零 件盒抓取电阻 拿电 阻 到 胸 前 插 入 PCBA对 应 孔 中
M3G3 M3P0 P5
14
1.81