测向交叉定位方法在工程中的应用
方位交会法在城区测量中的应用

建筑物遮挡:高楼林立的区域,建筑物遮挡严重,影响测量精度 信号干扰:高楼林立的区域,信号干扰严重,影响测量信号的接收和传输 测量设备限制:高楼林立的区域,测量设备受到限制,难以进行精确测量 测量时间限制:高楼林立的区域,测量时间受到限制,难以进行长时间测量
PART THREE
背景介绍:介绍城区测量的 背景和需求
智能化:随着人工智能和物联网技术的发 展,方位交会法在城区测量中的应用将更 加智能化,可以实现自动测量和实时监控。
环保与可持续发展:方位交会法在城区测 量中的应用将更加注重环保和可持续发展, 减少对环境的影响。
PART SIX
方位交会法在城区 测量中具有较高的 精度和可靠性
方位交会法在城区 测量中能够有效地 减少误差和偏差
环境监测:用于空气质量监测、噪声监 测等
智慧城市:用于智慧城市建设、管理、 服务等
科学研究:用于地理学、城市地理学等 学科的研究
技术进步:随着科技的发展,方位交会法 在城区测量中的应用将更加广泛和精确。
应用领域:方位交会法在城区测量中的 应用将不仅仅局限于传统的测量领域, 还将扩展到城市规划、交通管理等领域。
PART TWO
建筑物密集,遮挡视线
交通繁忙,影响测量精度
信号干扰,影响GPS定位
环境复杂,难以确定测量基准 点
建筑物遮挡:建筑物遮挡视线, 影响测量精度
信号干扰:建筑物密集区信号 干扰严重,影响测量信号接收
测量时间:建筑物密集区人流 量大,测量时间受限
测量精度:建筑物密集区地形 复杂,测量精度要求高
,a click to unlimited possibilities
汇报人:
CONTENTS
PART ONE
交叉定位算法

交叉定位算法交叉定位算法是一种用于确定目标位置的算法。
它通过利用多个观测点的测量数据,通过计算与目标的交叉角度或距离,来推断目标的具体位置。
这种算法广泛应用于无线通信、雷达、定位系统等领域。
一、算法原理交叉定位算法的原理基于三角测量的思想。
假设我们有三个观测点A、B、C,它们分别位于不同的位置,并且可以测量到与目标的角度或距离。
通过测量数据,我们可以得到观测点A、B、C与目标的夹角或距离,并且可以计算出观测点A、B、C之间的夹角或距离。
根据三角形的几何关系,我们可以推导出目标的位置。
二、算法步骤交叉定位算法的步骤可以概括为以下几点:1. 收集观测数据:首先,我们需要在不同位置设置观测点,并且能够测量到与目标的角度或距离。
这些观测点可以是天线、传感器等设备。
2. 计算观测点之间的夹角或距离:根据观测数据,我们可以计算出观测点之间的夹角或距离。
这些数据将作为后续计算的基础。
3. 推导目标位置:根据观测点之间的夹角或距离,我们可以利用三角形的几何关系,推导出目标的位置。
具体推导方法根据具体的算法而定,可以是迭代法、最小二乘法等。
4. 优化算法:为了提高算法的准确性和稳定性,我们可以通过优化算法来改进交叉定位算法。
例如,可以引入加权因子、滤波器等技术,来减小误差和噪声的影响。
三、应用领域交叉定位算法在无线通信、雷达、定位系统等领域有着广泛的应用。
以下是一些典型的应用场景:1. 无线通信:在无线通信系统中,交叉定位算法可以用于确定移动终端的位置。
通过利用多个基站的信号强度或时间差等测量数据,可以推导出移动终端的位置,从而实现室内定位、导航等功能。
2. 雷达系统:在雷达系统中,交叉定位算法可以用于确定目标的位置和速度。
通过多个雷达站的测量数据,可以计算出目标相对于雷达站的角度和距离,从而实现目标的跟踪和定位。
3. 定位系统:在定位系统中,交叉定位算法可以用于确定移动设备的位置。
通过利用多个接收器的测量数据,可以计算出移动设备相对于接收器的角度和距离,从而实现室内定位、导航等功能。
双基地雷达测向交叉定位算法的误差模型

h s n i e ro a o b a d er r.W i ac t d smu ai n e a l s h t a c dae i l t x mpe。w a e a e e t l h d e r rmo e o . r o te a t a i l o e c n s e t t s i e ro d lc D o mst cu cr h t h b a s f h l -
朱永文 , 娄寿春 , 韩小斌
( 空军 工程 大学导 弹 学院 , 陕西 三原 730 ) 180
【 摘要】 利用双基地平面关系将空间三维问题降为平面二维处理; 在分析影响定位精度因素前提下, 采用合理的假
定对定位方程泰勒展开 , 建立测 向交叉定位算 法的误差分析模 型 , 并证 明了测 向交叉 定位算法 的空 间位置 最小均 方差估 计是无偏估计 , 通过仿真算例 , 以看 出建立 的误 差模型 符合 实际情况。 可
【 关键词】 测 向交叉定位 ; 泰勒展 开 ; 误差分析
中图分类号 :N 5 T91 文献标识码 : A
Er o fCr s - ie to nd n r r o o s d r c i n Fi i g by Azm ut a d e a in e s e e n sa i da i h n EБайду номын сангаасv to M a ur m nti Bit tc l r
lmst h - i n in o e o h d e e t e t d me s n st a l .Un e h o d t n o ay i o o i o o ain n c u a y o wo o n d rt e c n i o fa l ss fp s in lc t i g a c r c 。we u e ar yo x a - i n t o s lre p n a
测向交叉定位
测向交叉定位实验报告一、 实验目的1、通过实验进一步加深对二维平面内测向交叉定位原理的理解;2、通过实验掌握利用最小二乘法提高二维平面内测向交叉定位精度的方法;3、提高Matlab 编程能力。
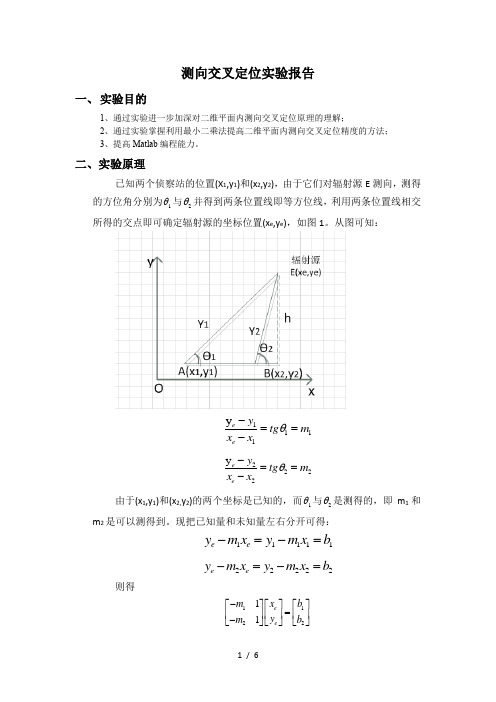
二、实验原理已知两个侦察站的位置(X 1,y 1)和(x 2,y 2),由于它们对辐射源E 测向,测得的方位角分别为1θ与2θ并得到两条位置线即等方位线,利用两条位置线相交所得的交点即可确定辐射源的坐标位置(x e ,y e ),如图1。
从图可知:1111y e e y tg m x x θ-==-2222y e e y tg m x x θ-==-由于(x 1,y 1)和(x 2,y 2)的两个坐标是已知的,而1θ与2θ是测得的,即m 1和m 2是可以测得到。
现把已知量和未知量左右分开可得:11111e e y m x y m x b -=-=22222e e y m x y m x b -=-=则得112211e e x m b y m b -⎡⎤⎡⎤⎡⎤=⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦⎣⎦即1112211e e x m b y m b --⎡⎤⎡⎤⎡⎤=⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦⎣⎦ 12112221e y y m x m x x m m --+=-211212112221e m y m y m m x m m x y m m --+=-三、定位误差分析上式是不考虑测向误差和侦察站的位置误差情况下求得的辐射源位置,实际上测向和测量侦察站的位置都是有误差的,由于这些误差的存在,将影响定位精度,下面分析园概率误差,研究辐射源的定位精度与测向误差及侦察站位置配置的关系。
由于测量误差是随机的,因此辐射源的位置也是随机的,它一般符合二维正态分布,当测量误差服从正态分布时,常用中间误差E 的大小来表示测度精度。
中间误差E 可由误差落在-E 与E 范围的概率为1/2时求得:即22()21()2x a EEEEf x dx edx σ----==⎰则E ==其中E 称为中间误差,又称分算误差,E 愈小表示测量精度愈高。
测绘技术中的交会定位原理与应用

测绘技术中的交会定位原理与应用测绘是一门关于测量、绘制和分析地球表面特征的学科。
在测绘过程中,交会定位是一种基本的测量手段,它通过多个已知点和测量点之间的交会,来确定测量点的位置。
本文将介绍测绘技术中的交会定位原理与应用。
一、交会定位原理交会定位依赖于三角测量原理,即利用三角形的几何关系来计算未知点的坐标。
在交会定位中,需要至少三个已知点和它们与未知点的观测角度或观测距离。
根据测量数据,可以利用三角计量学的原理计算未知点的坐标。
交会定位方法有几种,其中最常用的是三角定位法和后方交会法。
1. 三角定位法三角定位法是一种基于三角形的几何关系来计算未知点坐标的方法。
在三角定位法中,需要至少三个已知点和它们与未知点的观测角度。
通过测量角度并利用正弦定理和余弦定理,在已知点与未知点之间建立三角形,从而计算未知点的坐标。
2. 后方交会法后方交会法是一种基于已知点和未知点之间的观测距离来计算未知点坐标的方法。
在后方交会法中,需要至少三个已知点和它们与未知点的观测距离。
通过测量距离和利用三角形的几何关系,在已知点与未知点之间建立三角形,从而计算未知点的坐标。
二、交会定位应用交会定位在测绘领域有着广泛的应用。
下面将介绍交会定位在工程测绘、地理信息系统(GIS)和导航系统中的应用。
1. 工程测绘在工程测绘中,交会定位被广泛应用于建筑工程和道路工程等。
通过利用交会定位法,可以确定建筑物或道路的地理位置和空间坐标。
这对于规划、设计和施工都有着重要的意义,可以保证工程施工的准确性和高效性。
2. 地理信息系统(GIS)GIS是一种将地理空间信息和属性信息进行整合、管理和分析的系统。
交会定位在GIS中起着至关重要的作用。
通过将已知点的坐标信息输入到GIS系统中,可以通过交会定位方法计算出未知点的坐标信息。
这对于地图编制、资源管理和空间分析等方面都具有重要意义。
3. 导航系统导航系统是一种用于定位和导航的技术系统。
交会定位在导航系统中被广泛应用于车载导航、航空导航和船舶导航等。
交叉定位方法

交叉定位方法
交叉定位是一种高精度的定位技术。
它在水准测量、房屋测量等应用范围广泛,又叫归算地面扫描(TLS)技术。
它采用激光测距仪和机器人移动,能够获得空间位置定位精度高,同时又保持可靠性、准确性和精度高的特点。
它的原理是利用机器人移动和激光测距仪来实现空间位置的准确测量。
激光测距仪通过把激光照射成固定的模式来测量单点的距离,机器人的移动使得这个模式变动,通过以上操作,能够把3维空间的地面点转换成2维的地图,也就是通常所说的二维图像,把物理空间中的每一个点定位出来,精度非常高。
交叉定位技术也可以应用在复杂的环境中,包括城市路况、建筑物和障碍物等。
它在测量路况的时候,可以根据现场的具体情况,合理移动机器人,进而测量内外部空间的范围,从而可以精确测量每个地址的路况。
传统的测量用以较为粗糙,而交叉定位技术通过激光测距仪和机器人移动,在大量数据处理的基础上,可以同时获得空间位置定位精度高、可靠性、准确性和精度高这三个特点,使得定位和测量更加准确和高效。
交叉定位技术可以帮助人们更准确快速地找到某处的位置,一次定位一个点的精确度可达到几厘米级别。
总之,交叉定位技术的应用实现了精度和可靠性的相结合,为空间准确定位提供了一种新的解决方案,更加丰富了空间定位的技术方法。
它的使用不仅可以使
一些应用更加有效而且更加准确,而且能够节约大量的时间、人力和物力,为世界地理位置精确定位做出了巨大贡献。
测向交叉定位技术

测向交叉定位技术汪珺【摘要】Relevant precision expressions by expounding theory of Bi-static DOA passive location is deducted in this paper.According to thetheory,Geometric Dilution of Precision(GDOP) and relative error curve were given,then each positional parameters which affect%研究了无源双站测向交叉定位原理,推导出双站测向交叉定位的精度公式。
并给出了定位精度几何分布图(GDOP)与相对误差曲线图,详细分析了双站测向定位中参数对精度的影响。
仿真结果和性能分析为该类系统的技术作战运用提供了理论支持。
【期刊名称】《电子科技》【年(卷),期】2011(024)007【总页数】4页(P129-132)【关键词】测向交叉定位;仿真;精度分析【作者】汪珺【作者单位】西安电子科技大学电子工程学院,陕西西安710071【正文语种】中文【中图分类】TN953在电子支援(ESM)系统中,通过对辐射源的电磁参数、方向角和到达时间的被动测量估算辐射源及其载体平台的位置,称为无源定位。
由于ESM系统本身不发射能量,仅通过被动测量来对目标进行定位和隐蔽跟踪,这对提高系统在现代电子战(EW)环境下的生存能力具有重要作用。
测向交叉定位利用在不同位置处的多个侦察站,根据所测得同一辐射源的方向,进行波束交叉,确定辐射源的位置[1]。
对于真实目标来说,一般情况下,方向角度变化慢且范围小,是可靠的辐射源参数之一,特别在现代密集复杂信号环境下,方向参数几乎成为惟一可靠的辐射源参数,且用方向角来定位时对各侦察平台之间的时间统一性要求较低。
从这个意义上讲,对方向测量定位方法的研究具有重要的意义。
机载单站测向交叉定位中奇异测向线的聚类检测

机 载单 站 测 向交 叉 定 位 中奇 异 测 向线 的聚类 检 测
张 国毅 , 本 才 王
( 空军航空大学航空 电子系 , 长春 102 ) 302
摘要 : 在机 载单站 对地 面 多个 固定辐射 源 实施 测 向交叉 定位 时 , 对信 号初 分 选后仍 然存在 的 针
少量奇异测向线会严重影响定位精度的问题 , 采用聚类方法对其进行有效检测并剔除, 最后给
误 差 , 现在 背景 地 图上 就 是采 样 点 所 属 测 向 线 表 偏 离辐射源 。其 中有 些测 向线 偏 离 程 度较 大 , 对
值 J 。对奇 异测 向线 的检 测 与剔除 是运 用方 位
数据进行辐射源位置估计的必要前提。文献[3 8提
出用 “ 准则 、格 罗布斯 ” 3” “ 准则等 方法进行野值 识 别, 经过验证 , 这些 方法 有效 性并 不 是很 好。原 因 是载机对地 面辐射源 的侦察属于动 态测量 , 4 被识 量
cso a l n DOA p s ie o a in wi ige ar o e o s re o mu t tl e . A l s r g i n b d y i i a sv l t t sn l i r b e v r t l —a t c o h bn i g cu ti e n
me o spee td ta a d n i h m f ciey h i lt n rs l l ie t at t d i rsne t n ie ty te e e t l .T esmuai e ut aegv n a s . h h c f v o s l Ke r s a n r l aig l e ls r g d ni ig rt y wo d : oma r i ;cu ti ;ie ty n ae b e b n n en f
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
关 键词 : 雷达侦 察 ; 交 叉定位 ; 最小二 乘 法 ; 精 度
中 图分类 号 : T N 9 7 文献标 识 码 : A
文章 编号 : 1 6 7 2— 7 6 4 9 ( 2 0 1 3 ) 0 7— 0 0 6 7— 0 4 d o i : 1 0 . 3 4 0 4 / j . i s s n . 1 6 7 2— 7 6 4 9 . 2 0 1 3 . 0 7 . 0 1 3
俄罗 斯 的 B E F A 8 5 B 2一A 三 坐标 电子 情 报 站 、以 色 列的E L / L 8 3 0 0 G电子 支援 系 统等 采用 的就 是 三站 测 向交 叉定 位 体 制 。因 此 ,测 向交 叉 定位 技 术 具 有 重
LI Ho ng - k e, H UANG L i n— s h u
( S c h o o l o f E l e c t r o n i c s E n g i n e e r i n g, N a v a l Un i v e r s i t y o f E n g i n e e r i n g, Wu h a n 4 3 0 0 3 3, C h i n a )
Re s e a r c h o n a p a s s i v e c r o s s l o c a t i o n me t ho d i n t he d i r e c t i o n in f di n g e n g i n e e r i ng
0 引 言
与 有 源探测 设 备 相 比 ,无 源 探 测设 备 具 有 作 用 距 离远 、宽带 工 作 、低 截 获率 等 优 点 ,可 增 强 系 统 在 电子 战 环境 下 的 抗 干 扰 能 力 ,是 现 代 电子 对 抗 中 不 可缺 少 的重 要手 段 。 测 向交 叉 定 位方 法 是 通 过 移 动 机 载或 地 面 单 站 的移动 ,在不 同位 置 多 次 测 量 方 位 ,利 用 方 位 线 的 交会 进 行定 位 ,或 者 通 过 空 载 或 地 面 固定 多 站 的测 角 系统 所测 得 的 指 向 线 交会 进 行 定 位 。测 向交 叉 定 位 系统 具有 全 方 位 、快 速 、探 测 距 离 较 远 、在 受 到
f o r m ul a f o r l o c a t i o n s o l u t i o n a nd e r r o r p r o b a b i l i t y a r e g i v e n. The a p pl i c a t i o n s o f t he l e a s t s qu a r e me t h o d i n r a da r de t e c t i n g a nd t he c o mp ut e r s i m ul a t i o n a r e pr e s e n t e d. Th e s i m ul a t i o n r e s u l t s i n di c a t e t h e pr e c i s i o n i s r e l a t e d wi t h t he l o c a t i o n,b a s e l i n e di s t a nc e a n d m e a s ur i ng p r e c i s i o n.The we i g h t e d l e a s t s qu a r e me t h o d a l g o r i t hm i s us e f u l i n t h e pr a c t i c a l e ng i ne e r i n g, wi t h i t s a dv a nt a g e s o f h i g h p r e c i s i o n a n d
Ab s t r ac t : A t h r e e - d i me n s i o n a l p a s s i v e c r o s s l o c a t i o n me t ho d i s e x pa n de d o n t he pa pe r a nd t he
摘 要 : 根 据三维测 向定位算法 , 给 出定位公式及 定位误差 , 研究 最小二乘算法在侦察定位工程 中的应用 , 并
进 行 仿 真 。仿 真 结 果 显 示 , 目标 定 位 精 度 与布 站 的 位 置 、 基 线 区距 离 、 测 角 精 度 等 有 关 。采 用 基 于 加 权 最 小 二 乘 的 定 位算法定位 精度高 , 运 算 量 相 比较 小 , 利 于 实 际 的工 程 应 用 。
l e s t c a l c u l a t i o n.
Ke y wo r ds: r a d a r de t e c t ; c r o s s l o c a t i o n; l e a s t s q u a r e me t ho d; p r e c i s i o n
第3 5卷 第 7期
2 01 3年 Βιβλιοθήκη 月 舰船科
学
技
术
Vo 1 . 3 5,No . 7
S HI P S CI ENCE AND TECH NOLOGY
J u 1 .,2 01 3
测 向 交叉 定 位 方 法 在 工 程 中 的 应 用
李洪科 , 黄 麟 舒
( 海 军工程 大 学 电子 工程 学院 , 湖北 武 汉 4 3 0 0 3 3 )