FGOALS性能优化技术研究
运行速度大突破华为《方舟编译器》详解
运行速度大突破华为《方舟编译器》详解随着移动互联网和云计算的快速发展,编译器作为软件开发中不可或缺的重要工具,其运行速度和效率一直是开发者们非常关注的问题。
华为作为全球领先的通信技术解决方案供应商和智能设备制造商,一直在研究和推动编译器技术的发展。
近年来,华为研发的《方舟编译器》在运行速度方面取得了重大突破,受到了广泛的关注和好评。
本文将详细解析华为《方舟编译器》的技术特点和性能优势,为读者解读其运行速度大突破的原因和意义。
一、《方舟编译器》的技术特点1. 基于LLVM架构《方舟编译器》是基于LLVM(Low Level Virtual Machine)架构开发的,这为其提供了强大的编译优化能力和灵活的扩展性。
LLVM是一个开源的编译器基础设施,提供了一套通用的中间表示IR(Intermediate Representation)和优化器,可以应用于各种编程语言和目标架构。
基于LLVM架构的《方舟编译器》具有良好的跨平台特性和可移植性,可以在不同的硬件平台和操作系统上高效运行。
2. 支持多种编程语言和目标架构《方舟编译器》支持多种主流的编程语言,包括C、C++、Rust等,可以为不同的应用场景提供编译支持。
它还支持多种目标架构,包括ARM、x86等,可以为不同的硬件平台生成高效的机器码。
这使得《方舟编译器》具有广泛的适用性和通用性,能够满足不同开发者的需求。
3. 具有先进的优化技术《方舟编译器》内置了多种先进的编译优化技术,包括指令调度、循环优化、内存优化等,可以提高生成的机器码的运行效率和性能。
它还支持全局的程序优化和整体的性能分析,可以帮助开发者发现和解决代码中的性能瓶颈,进一步提升程序的运行速度。
1. 显著提高了编译速度相比传统的编译器,华为《方舟编译器》在编译速度上有了显著的提升。
通过使用LLVM 的优化技术和并行编译技术,它能够在保证代码质量的前提下,将编译时间大大缩短,提高开发者的工作效率。
Oracle性能调整的三把利剑--ASH,AWR,ADDM

Oracle性能调整的三把利剑--ASH,AWR,ADDMASH (Active Session History)ASH以V$SESSION为基础,每秒采样一次,记录活动会话等待的事件。
不活动的会话不会采样,采样工作由新引入的后台进程MMNL来完成。
ASH buffers 的最小值为1MB,最大值不超过30MB。
内存中记录数据。
期望值是记录一小时的内容。
生成ASH报告:SQLPLUS>@?/rdbms/ashrpt.sqlASH内存记录数据始终是有限的,为了保存历史数据,引入了自动负载信息库(Automatic Workload Repository ,AWR) 由后台进程MMON完成。
ASH信息同样被采集写出到AWR负载库中。
由于内存不是足够的,所以MMNL进程在ASH写满后会将信息写出到AWR负载库中。
ASH全部写出是不可接受的,所以一般只写入收集的10%的数据量,而且使用direct-path insert完成,尽量减少日志的生成,从而最小化数据库性能影响。
写出到AWR负载库的ASH信息记录在AWR的基础表wrh$active_session_hist中,wrh$active_session_hist是一个分区表,Oracle会自动进行数据清理。
AWR(Automatic Workload Repository)自动工作负载信息库AWR是Oracle 10g中的一个新特性,类似于10g以前的statspack。
不过在使用上要比statspack 简单,提供的性能指标要比statspack多很多,能更好的帮助DBA来发现数据库的性能瓶颈。
AWR是Oracle安装好后自动启动的,不需要特别的设置。
收集的统计信息存储在SYSAUX 表空间SYS模式下,以WRM$_*和WRH$_*的格式命名,默认会保留最近7天收集的统计信息。
每个小时将收集到的信息写到数据库中,这一系列操作是由一个叫MMON的进程来完成的。
高效动态幁时隙ALOHA算法
针对无源RFID标签的高效动态幁时隙ALOHA算法摘要:即使在一些技术的限制下,无源标签的使用也极大地增强了射频识别(RFID)系统获取海量数据的能力,这些数据来自被标记并且能够被无线识别的物体。
但是,如果进行多个标签的同时识别,那么来自标签的数据将可能发生碰撞并相互抵消。
目前比较流行的防冲突算法之一是ALOHA算法。
在要读取的标签数量合理的情况下,该算法简单且具有良好的性能。
在本文中,我们扩展了先前的研究,建立了一个基于高效的动态时隙ALOHA算法的无源RFID标签模型,并对相关的问题进行了探讨和更正。
关键字:RFID 无源标签识别防碰撞 ALOHA 高效动态幁时隙一.引言各种组织团体通过现代信息系统(IS)来获取,解释,保留和传播信息。
信息技术(IT)领域的技术创新通过不断改善组织的性价比功能来执行这四项基本任务。
智能代理和知识管理系统使管理人员能够解释数据和信息,以创建有用的管理知识。
存储媒体技术的进步是企业积累大量数据库,同时不断增加的处理能力也使管理人员能够发掘出对他们有用的信息,比如现有客户和潜在市场的数据。
此外,以科技为基础的实时信息采集和决策支持系统的进步促进了实时决策,使组织能够优化他们的经营行为。
最近,RFID(无线射频识别)作为条码的替代物,引起了分销行业,供应链行业以及银行业的重视。
这是因为RFID系统具有非接触识别的优势,并且能够比条码存储更多的数据。
但是,如果有多个标签响应阅读器,那么多个标签的响应将在通信信道中引起冲突,导致标签的响应不能够被阅读器接收。
这种情况称为“标签的碰撞”,是RFID系统应用的一个重要限制。
研究人员一直以各种方式解决这一问题,有些方法是通过扩展频带来增加数据传输速率,进而最大限度地减少标签冲突,提高标签的识别率。
这不是一个很理想的解决方案,因为通信频带往往是受限制的。
最广泛使用的技术是时隙ALOHA算法和二进制搜索算法。
既然是最简单的实现,幁时隙ALOHA算法是最常使用的。
优斐斯数据驱动优化策略
优斐斯数据驱动优化策略
优斐斯数据驱动优化策略是指利用数据分析和统计模型等手段,对优斐斯系统中的各项策略进行优化和调整的方法。
具体来说,优斐斯数据驱动优化策略包括以下几个步骤:
1. 数据收集:通过收集用户、市场和竞争对手等相关数据,建立系统的数据集。
2. 数据分析:利用数据分析工具和算法,对数据进行处理和分析,提取有用的信息和规律。
3. 建模与预测:基于数据分析的结果,建立统计模型和预测模型,预测和估计不同策略对系统性能的影响。
4. 策略优化:根据建模和预测的结果,对优斐斯系统中的各项策略进行优化调整。
可以采用A/B测试等方法,评估和比较不同策略的效果。
5. 回馈优化:根据实际效果和用户反馈,对优化的策略进行迭代和调整,不断提升系统性能和用户体验。
通过数据驱动的优化策略,优斐斯系统可以更加准确地了解用户需求和行为,针对性地进行策略调整,提升系统的性能和效果。
同时,数据驱动的优化策略也能
够提供决策支持和参考,帮助优斐斯系统做出更科学和合理的决策。
异构格里芬四词条-解释说明

异构格里芬四词条-概述说明以及解释1.引言1.1 概述概述异构格里芬四词条是一篇探讨异构计算和格里芬的关系、优势以及应用领域的长文。
异构计算是指利用不同类型的处理器或计算单元来完成计算任务的一种计算模式,而格里芬是一种用于高性能计算的编程模型和框架。
本文旨在介绍异构格里芬的基本原理和原则,深入探讨其在科学研究、工程技术和商业应用等领域的应用情况,并展望其未来的发展潜力。
在本文的正文部分中,我们首先将阐述异构计算的概念及其背后的原理。
异构计算通过同时使用不同类型的处理器,如CPU、GPU和FPGA 等,来实现更高效的计算。
其中,GPU作为一种高度并行的处理器,具有强大的计算能力,已经成为异构计算中的重要角色。
接着,我们将介绍格里芬作为一种特定的编程模型和框架,如何与异构计算结合,从而实现高效的数据并行计算。
接下来,我们将详细探讨异构格里芬的优势所在。
异构格里芬的核心思想是通过将任务细化为多个子任务,并将这些子任务分配到合适的处理器上并行执行,从而实现更高的计算效率和性能。
相比传统的单一处理器计算模式,异构格里芬能够充分利用不同处理器的特点和优势,提高计算速度和能效,并在科学研究、工程技术和商业应用等领域发挥重要作用。
此外,本文还将探讨异构格里芬在不同应用领域的具体应用实例。
我们将介绍异构格里芬在天文学、物理学、医学、人工智能等领域中的应用案例,并分析其在这些领域中取得的成果和效果。
这些实例将进一步展示异构格里芬在各个领域中的广泛应用和巨大潜力。
在结论部分,我们将对异构格里芬的重要性进行总结。
异构格里芬作为一种高效的计算模式,已经成为科学研究和工程技术领域的重要工具。
同时,我们也将展望异构格里芬未来的发展潜力,并指出应该进一步研究和探索的方向。
结论的重要性在于对整个文章的核心观点和论证进行总结和强调,同时也为未来的研究提供了一定的指导。
综上所述,本文将介绍异构格里芬的概念、原理和优势,探讨其在不同应用领域的应用实例,并为进一步研究提供了方向。
针对AES和CLEFIA的改进Cache踪迹驱动攻击
K e w or :AES;CLEFI ; r c rve Cac ta k;tbl oo p nd x y ds A ta ed i n; heat c a e l ku i e
1 引 言
传 统 的密 码 分析视 密 码算 法 实现 为 黑盒 ,密码 算 法 安 全 性 完 全 取 决 于 实现 的数 学 函 数 以及 密 钥
A S主密钥搜索空 间降低 到 2 E 和 1 0个样本经 C E I 第 1 ,8 L FA 轮分析可将 1 8 i CL FA第 1 2 bt E I 轮扩展密钥搜索
空 间 降低 到 2 ,2 0个 样 本 经 前 3轮 分 析 可 将 18 iC E I 主 密 钥 搜 索 空 间 降 低 到 2 耗 时 不 超 过 1。 2 2 bt L FA , s
的方法 。
C ce ah 攻击大体分为 C ce ah 信息采集和信息分 析 2 阶段 ,根据 采集 信 息不 同 ,可将 其分 为 时序 个 驱 动 、访 问驱动 和踪 迹驱 动 3种 ,本文给 出 了一种
改进 的 Cah c e踪 迹驱 动信 息分 析方 法 ,并对 AE S
执 行 效率 ,现 代 分 组密 码大 都 使用 S 盒查 表访 问
通
信
学
报
J2EE项目开发中如何正确地对数据库访问的性能进行优化
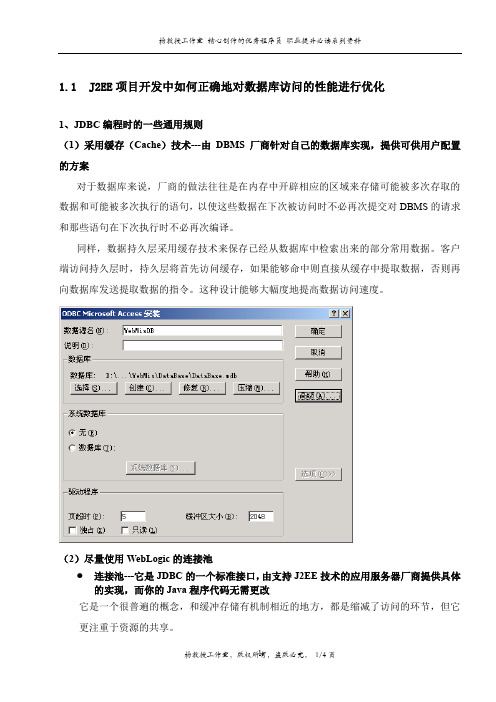
1.1J2EE项目开发中如何正确地对数据库访问的性能进行优化1、JDBC编程时的一些通用规则(1)采用缓存(Cache)技术---由DBMS厂商针对自己的数据库实现,提供可供用户配置的方案对于数据库来说,厂商的做法往往是在内存中开辟相应的区域来存储可能被多次存取的数据和可能被多次执行的语句,以使这些数据在下次被访问时不必再次提交对DBMS的请求和那些语句在下次执行时不必再次编译。
同样,数据持久层采用缓存技术来保存已经从数据库中检索出来的部分常用数据。
客户端访问持久层时,持久层将首先访问缓存,如果能够命中则直接从缓存中提取数据,否则再向数据库发送提取数据的指令。
这种设计能够大幅度地提高数据访问速度。
(2)尽量使用WebLogic的连接池连接池---它是JDBC的一个标准接口,由支持J2EE技术的应用服务器厂商提供具体的实现,而你的Java程序代码无需更改它是一个很普遍的概念,和缓冲存储有机制相近的地方,都是缩减了访问的环节,但它更注重于资源的共享。
对于访问数据库来说,建立连接的代价比较昂贵,因此,数据持久层建立了“连接池”以提高访问的性能。
数据持久层把连接当作对象,整个系统启动后,连接池首先建立若干连接,访问本来需要与数据库连接的区域,都改为和池相连J DBC代码调优最大的原则就是使用WebLogic的连接池,而不是自己直连数据库因为,WebLogic提供了功能强大,性能良好的数据库连接池,我们要做的只是封装一个连接管理类,从JNDI树上获取数据源并缓存,得到连接,并提供一系列关闭数据库资源的方法。
(3)对任何资源使用的原则是用完即关对任何资源使用的原则是用完即关,不管是数据库资源、上下文环境,还是文件。
数据库资源的泄漏极易造成内存泄漏,乃至系统崩溃。
在使用完数据库资源后依次关闭ResultSet,Statement和Connection,而在一个数据库连接多次进行数据库操作时要特别注意ResultSet和Statement依次关闭。
气象科技管理信息系统
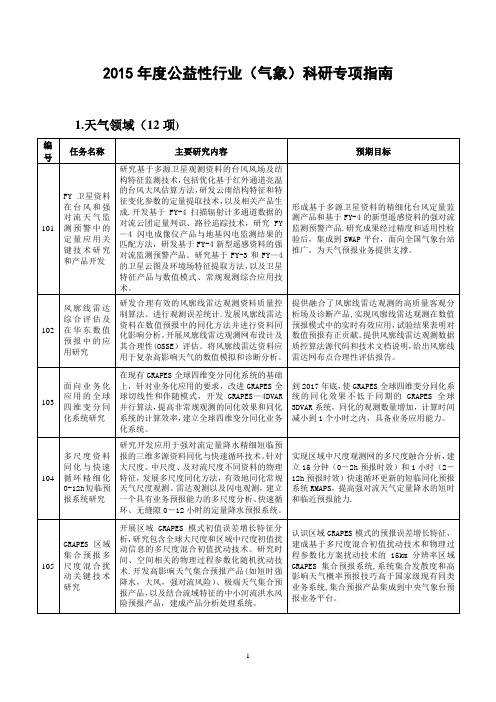
形成基于多源卫星资料的精细化台风定量监测产品和基于FY-4的新型遥感资料的强对流监测预警产品.研究成果经过精度和适用性检验后,集成到SWAP平台,面向全国气象台站推广,为天气预报业务提供支撑。
102
风廓线雷达综合评估及在华东数值预报中的应用研究
研发合理有效的风廓线雷达观测资料质量控制算法、进行观测误差统计.发展风廓线雷达资料在数值预报中的同化方法并进行资料同化影响分析。开展风廓线雷达观测网布设计及其合理性(OSSE)评估。将风廓线雷达资料应用于复杂高影响天气的数值模拟和诊断分析。
2。气候领域(14项)
编号
任务名称
主要研究内容
预期目标
201
动态地表覆盖变化数据在气候模式中的应用研究
研究面向气候模式需求的地表覆盖遥感提取方法,研制基于动态地表覆盖类型概念的21世纪以来逐月地表覆盖数据产品.探索地表覆盖动态数据在BCC_CSM分量模式中的应用方法,评估其模式效果改进的潜力.
建立2000—2015年间逐月的250m分辨率卫星观测地表覆盖数据产品集,制作完成BCC-CSM模式预估的2016-2100年逐年的地表覆盖状况数据集,实现地表覆盖变化数据在气候模式中的动态表达,以提高模式性能.
205
全球和区域多模式集合的省级短期气候降尺度预测技术研究
研究多全球气候模式驱动下多区域气候模式的集合技术方法,研制适用于省级业务应用的短期气候预测系统。在与现有的经验统计方法结果对比分析和历史回报检验基础上,开展跨季度和年度尺度的高分辨率短期气候预测业务试验。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
知识 引导的遗 传算 法 K G A 、 蚁 群算 法 、 加入 L o g i s t i c映射 的P S O和本文算法 分别 执行 1 0次 , 得到 每个 算法 的 平均求 解 时间和平均路径长度 , 结果如表 1所示 。
表 1不 同算 法 比较
[3]王雪松 , 高 阳, 程玉虎 , 等. 知识引导遗传算法实现机器人 路径规划 [ J ] .控制与决策 , 2 0 0 9, 2 4( 7 ): 1 0 4 3—1 0 4 9 . [4]Ma s e h i a n E, A mi n — N a s e i r M R .S e n s o r — b a s e d r o b o t mo t i o n p l a n n i n g - A t a b u s e a r c h a p p r o a c h [ J ] . I E E E R o b o t i c s a n d A u t o m a t i o n M a g a z i n e ,
i n g s o f I EEE I n t e r n a t i o n a l Co fe n r e n c e o n Ne u r a l Ne t wo r k s ,P e r t h,
Au s t r a l i a , 1 9 9 5: 1 9 4 2—1 9 4 8.
[ 9]C h e n D B , Z h a o C X .P a r t i c l e s w a m i o p t i m i z a t i o n w i t h a d a p t i v e p o p u -
l a t i o n s i z e a n d i t s a p p l i c a t i o n [ J ] .A p p l i e d S o t f C o m p u t i n g , 2 0 0 9 ,9
第 5期
周峰 : 基于 T e n t 混 沌粒 子群 算 法的 滚动 窗 口路 径规 划
a l El e c t r o n i c s a n d Ap p l i c a t i o n s , 2 0 0 8: 2 9 8—3 01 .
7 9
为了消除一次运行结果 中诸 多随机因素的影响 , 对 P S O 、
[7]孙波 , 陈卫东 , 席裕庚. 基于粒子群优化算法 的移动机器人 全局路 径规划 [ J ] . 控制与决策 , 2 0 0 5, 2 0 ( 9 ) : 1 0 5 2—1 0 6 0 . [8] S a s k a M , M a c a s M , P r e u c i l L .R o b o t p a t h p l a n n i n g u s i n g p a r t i c l e
( 1 ) :3 9— 4 8 .
[ 1 O ]张英杰 ,刘朝 华. 融合微粒群 的多种群协 同进 化免疫 算法 [ J ] . 控 制与决策 , 2 0 1 0, 2 5 ( 1 1 ): 1 6 5 7—1 6 6 2 .
[ 1 1 ]J i n Y i s u , J o s h u a K n o w l e s , L u H o n g m e i , e t 1 a . T h e l a n d s c a p e a d a p t i v e p a r t i c l e s w a r m o p t i m i z e r [ J ] . A p p l i e d S o f t C o m p u t i n g , 2 0 0 8 , 8 ( 1 ) :
—
8 3 9.
( 3 )本文算法亦可 以应用 到未知 动态环 境 中的路径 规划 。 文 献[ 1 9 ] 中的动态 避碰 策略 的基本 思想 是将 机器人 视 野域 内
的动态 障碍物沿其运动方 向延伸 为一 较大 的静态 障碍物 , 从 而 将 动态 避碰问题转化 为静态 避碰 问题来 解决 。借 鉴此思 想 , 本 文做 了未知动态环境 的中的路径 规划 实验 。实验结果如 图 5所 示, 图中圆圈表示 动态障碍物 。 .
算法
PS O E T l
平均 时间/ s
46 6 2
.
平均路径长度
5 9 3 . 1 8
[5]钟建冬 , 苏剑波. 基于概率 路标 的机 器人狭 窄通道 路径规 划 [ J ] . 控制与决策 , 2 0 1 0, 2 5 ( 1 2 ) : 1 8 3 l 一1 8 3 6 . [6]K e n n e d y J , E b e r h a t r R C . P a r t i c l e s w a l s , n o p t i m i z a t i o n [ C] / / P r o c e e d —
s w a r m o p t i m i z a t i o n o f F e r g u s o n S p l i n e s [ C ] / / E m e r g i n g T e c h n o l o g i e s
a n d F a c t o r y Au t o ma t i o n 2 0 0 6. P r a g u e,C z e c h: I E EE P r e s s , 2 0 0 6: 8 3 3
k GA[ 3 ]
45 2 5
.
5 9 0
自适 应蚁群算法[ ”] 加入 L o g i s t i c 映射 的 P S O 本文算法
4 5 . 1 2 5 2 . 7 8 4 8 . 3 5
5 9 1 . 1 2 5 8 5 . 4 7 5 8 3 . 5 4