滑动模态控制器在液压伺服系统中的应用
液压伺服系统中模糊-滑模控制器的设计及应用
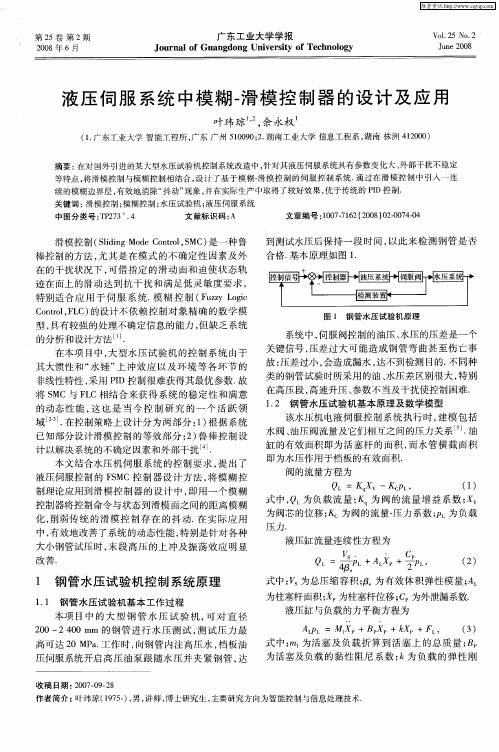
图 1 钢 管水压试 验机原 理
系统中, 伺服 阀控 制 的油压 、 水压 的压 差是 一个 关键 信 号 , 差 过 大可 能 造 成 钢 管弯 曲甚 至 伤 亡 事 压
故; 压差 过小 , 会造 成漏 水 , 达不 到检测 目的. 同种 不
1 钢 管 水 压 试 验 机 控 制 系统 原 理
1 1 钢管 水压 试 验机基 本 工作过 程 ,
式 中 :s I 为总 压 缩容 积 ; 有 效体 积 弹 性模 量 ; / 卢为 A 为柱塞 杆面积 ; 为柱塞杆位移 ; 为外泄漏 系数, c
液压 缸与 负 载 的力 平衡 方程 为 Ap LL=MIP+B P+k P+F , X P X L () 3
改善 .
式 中 , 为负 载 流 量 ; q为 阀 的 流 量 增 益 系 数 ; Q K 为 阀芯 的位移 ; c 阀的流 量一 K 为 压力 系数 ; 为 负 载 p
压力 .
液 压缸流 量连 续性 方程 为
・
.
Q L=
pe
L+A XP+— L L ,
‘
() 2
Jn 08 u e2 0
液 压 伺 服 系统 中模糊 一 滑模 控 制 器 的设计 及 应 用
叶 玮 琼 , 永 权 余
(. 1广东工业大学 智能工程所 , 广东 广州 50 9 ;. 100 2 湖南 工业大学 信息工程系 , 湖南 株洲 4 20 ) 10 0
摘要 : 在对 国外 引进 的某 大型水 压试 验机控制系统改造 中, 针对 其液 压伺 服系统具 有参数变化大、 外部干扰不稳定 等特点 , 将滑模控制 与模糊控制相结合 , 设计 了基 于模糊一 滑模 控制 的伺服控 制系统 . 通过 在滑模 控制 中引入一 连 续的模糊边界层 , 有效地 消除“ 抖动” 现象 , 并在实际生产 中取得了较好效果 , 于传 统的 PD控制. 优 I
伺服控制器与液压系统的协同控制技术

伺服控制器与液压系统的协同控制技术随着工业自动化的快速发展,伺服控制器与液压系统的协同控制技术在工业生产中的重要性日益凸显。
这项技术通过将伺服控制器与液压系统紧密地结合在一起,实现机械装置的高精度控制和高效能使用,进一步提升了生产效率和产品质量。
首先,我们需要了解伺服控制器是什么。
伺服控制器是一种能够精确控制速度、位置和力量的装置,通过反馈机制实时调整输出信号,从而实现对系统的精准控制。
与传统的控制器相比,伺服控制器具有更高的响应速度和更精确的控制性能,被广泛应用于工业自动化领域。
液压系统是利用液体传递力量和运动的一种系统,能够提供高功率、高扭矩的输出。
液压系统通过油液流动控制执行元件的动作,通过改变液压系统中的流量、压力和阀门的位置来控制工作机构的运动。
在许多工业领域,液压系统具有传动力矩大、输出力矩平稳、反应时间短等优势,被广泛应用于机械装置中。
将伺服控制器与液压系统相结合,可以发挥两者的优势,实现更高效准确的控制。
具体来说,伺服控制器可以通过传感器实时采集到液压系统的状态信息,如流量、压力和位置等,然后根据预设的控制算法进行处理,调整伺服控制器的输出信号,控制液压系统的工作。
这种协同控制技术能够最大限度地发挥液压系统的功效,提供更精确的位置控制和更高效的能量利用。
协同控制技术在许多领域都得到了广泛的应用。
例如,在机床加工过程中,通过将伺服控制器与液压系统相结合,可以实现机械切削过程的高精度控制。
通过实时监测工作台的位置以及液压系统的压力和流量等参数,并根据预设的控制算法进行处理,控制液压系统的输出信号,从而实现工作台的精确运动,提高加工质量和生产效率。
在工程机械领域,协同控制技术也起到了至关重要的作用。
通过将伺服控制器与液压系统结合,可以实现工程机械的高精度定位和快速响应。
例如,在起重机械中,通过实时监测起重臂的位置以及液压系统的压力和流量等参数,并根据预设的控制算法进行处理,调整液压系统的输出信号,实现起重臂的精确控制和平稳运动,提高工作效率和安全性。
电液位置伺服系统的滑模变结构控制研究李绍博PPT学习教案

电液位置伺服系统的终端滑模控制器设计
具有全局鲁棒性的终端滑模面设计
滑模面方程设计为
s c3e c4e c5e c3 p(t) c4 p(t) c5 p(t)
(4.1)
假设 p(t) : R R为, p定(t)义在 的0,阶可 微n的连续函数对于某个
常数
是T在 时0, 间p(t段) 上有界的0,,T并 且满足
电液伺服控制系统已经被广泛地应用于航空、冶金等 重要领域。它综合了电气和液压两方面的特长,具有控 制精度高、响应速度快、输出功率大等优点。
电液伺服系统是一类典型的不确定非线性系统,普遍 存在参数变化和外干扰。
滑模变结构控制是一种十分有效的鲁棒控制策略,得 到了广泛的应用。
电液伺服系统的滑模变结构控制方法的研究具有重要 的理论意义和实际应用价值。
位
置
伺
服
系
统
的
滑
模
变
结
构
控
制
研
究
(
李
绍
博
)
电
液
位
置
伺
服
系
统
的
滑
模
变
结
构
控
制
研
究
(
李
绍
博
)
2021年7月15日
电液位置伺服系统的数学模型
城
如
霸
蛋
熙
原
掷
怖
泵
士
瘫
奔
蠢
渴
滩
痈
签
第4页/共31页
秋 膀 康
乡 秩 猪
舌 雕 蝎
餐
吁
究
枢
夺
林
基于模糊滑模控制的液压位置伺服系统仿真
M > sp fb u( ) /
( 3 1)
c 2<if 口 ) n( 1
2 2 模 糊 控制 器设 计 .
( 4 1)
式 中 ,u ( 为上 确界 函数 , f) 下确 界 函数 。 sp ) i (为 n 二 维模 糊控 制器 具有 简化 系统 结构 复杂性 的 作用 , 采用 二维模 糊控 制器 , 过模糊 控 制规律 直 通 接 设计 滑模 量 。设模 糊控 制 器 的 输入 是 s 和 , 输 出为 等效 控制 l Z ( ) 义 模糊 集 P 1定 B=正大 ,M =正 中 , S= P P
为 了保 证滑 动模 态 的存 在 , 满足 可达 性条件 ,
即在 s 0以外 的任 意 点 均 能 在 有 限 的时 间 内达 =
到 切换 面 s 0, 制 函数必 须满 足式 (2 。 = 控 1 )
s≤ 0 ( 2 1)
由式 ( )式 ( ) 式 ( ) 得 三通 阀控 差 动 1、 3和 5绘
滑模 的抖动 现 象 。仿 真结 果 表 明, 这种 控 制 方 法
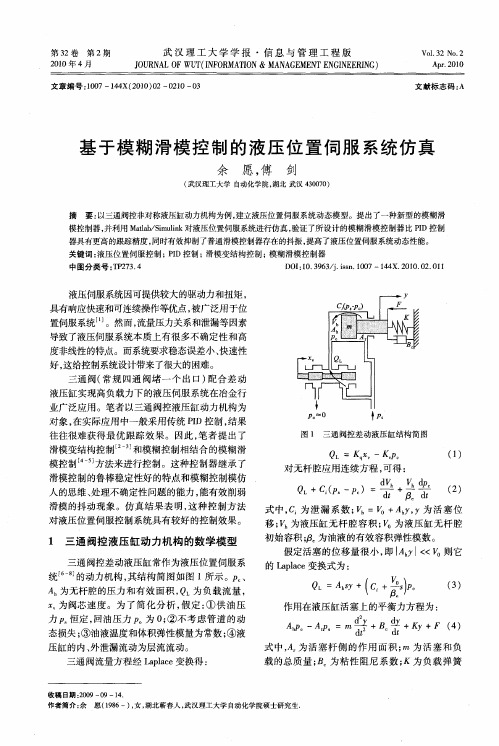
对无 杆 腔应用 连续 方程 , 可得 :
Q
)警+ =
( 2 )
式 中 , 泄 漏 系 数 ; =V A Y Y为 活 塞 位 C为 o+ , 移 ; 为液压 缸无 杆 腔 容 积 ; 为液 压 缸 无 杆 腔 初始 容积 ;。 卢 为油 液 的有效容 积 弹性模 数 。
对液压位置伺服控制系统具有较好的控制效果 。
1 三通 阀控液压缸动力机构的数学模型
三通 阀控差 动液 压缸 常作 为液压 位置伺 服 系
假定活塞的位移量很小 , J J <V 则它 即 A, < o ,
的 L pae变换式 为 : a lc
《电液位置伺服控制系统的模糊滑模控制方法研究》范文

《电液位置伺服控制系统的模糊滑模控制方法研究》篇一一、引言电液位置伺服控制系统在工业自动化、航空航天、船舶导航等多个领域发挥着重要作用。
其核心任务是确保系统能够准确、快速地响应指令,并实现高精度的位置控制。
然而,由于系统内部及外部环境的复杂性,传统的控制方法往往难以满足现代高精度、高稳定性的需求。
为此,本文将探讨电液位置伺服控制系统的模糊滑模控制方法,以提升系统的性能。
二、电液位置伺服控制系统概述电液位置伺服控制系统主要由伺服电机、液压泵、执行机构及反馈装置等组成。
系统通过控制器接收指令,驱动伺服电机,进而控制液压泵的输出,使执行机构实现精确的位置控制。
然而,在实际运行过程中,系统会受到多种因素的影响,如负载变化、环境温度变化等,这些因素都会对系统的性能产生影响。
三、传统控制方法的局限性传统的电液位置伺服控制系统主要采用PID控制、自适应控制等方法。
这些方法在一定的条件下能够取得较好的控制效果,但在面对复杂的系统环境和多变的外部条件时,其控制效果往往不尽如人意。
主要表现为系统响应速度慢、稳定性差、精度低等问题。
因此,有必要对控制方法进行改进和优化。
四、模糊滑模控制方法研究针对传统控制方法的局限性,本文提出了一种基于模糊滑模控制的电液位置伺服控制系统。
该方法将模糊控制和滑模控制相结合,利用模糊控制对系统的不确定性进行估计和补偿,同时利用滑模控制的快速响应和强鲁棒性,提高系统的整体性能。
(一)模糊控制模糊控制是一种基于模糊集合理论的控制方法,能够处理系统中的不确定性和非线性问题。
在电液位置伺服控制系统中,模糊控制通过对系统状态进行模糊化处理,建立模糊规则库,实现对系统不确定性的估计和补偿。
(二)滑模控制滑模控制是一种变结构控制方法,其核心思想是根据系统当前的状态,实时调整控制器结构,使系统在滑动模态下运行。
在电液位置伺服控制系统中,滑模控制能够实现对系统状态的快速响应和强鲁棒性。
(三)模糊滑模控制的实现在电液位置伺服控制系统中,将模糊控制和滑模控制相结合,形成模糊滑模控制器。
新型模糊滑模控制器在交流位置伺服系统中的应用研究
Re e r h o e f z y si i g mo e c n r le n s a c fn w u z ld n d o to l r o AC p sto e v y t m o i n s r o s se i
W ANG a Xin, YANG Kun, SUN iln, S Ka —i ONG h ln S u—i
将 伺 服 系 统 的速 度 运 行 曲 线 划 分 为 最 大 加 速 、 速 、 大 减 速 恒 最
0 引言
工业对象 的多样化和 复杂化对位 置伺 服系统 提 出了更高 的要求 , 现代位置伺服 系统不仅 对定 位精度 的要求越 来越 高 , 同时也要求系统能实现对速 度的规 划和控 制… 。随着交 流 电
关 键 词 :位 置 伺 服 系统 ;模 糊 滑 模 ; 速 度
中图分类 号 :T 2 P9
文献 标志码 :A
文 章编 号 :10 —6 5 2 1 ) 10 6 — 4 0 139 (0 10 —050
di1 .9 9 ji n 10 —6 5 2 1 . 10 6 o:0 3 6 /.s . 0 1 9 .0 1O . 1 s 3
动 机 控 制 技 术 的不 断 成 熟 , 构 成 的伺 服 系 统 在 数 控 、 器 人 、 其 机 机 械 手 臂 、 机 系 统 等 众 多 领 域 得 到 了 越 来 越 广 泛 的 应 轧
三 个 部 分 , 步解 决 了 位 置 滑 模 控 制 器 中 速 度 不 可 控 的 问 题 。 初
i a to xe n ld su b n e whiec nto i n ls fe ldi de c nto y tm e uc d t nh r n hatrn .S mua mp c fe tr a it r a c s, l o r lsg a o tn si ngmo o r ls se r d e hei e e tc t i g i l— e to e u t h w he c re t s fte d sg d c n r le nd t e c n r lsr tg sef cie. i n r s ls s o t o r cne so h e ine o tolra h o to tae y i fe tv K e wor y ds: s se o osto ev y tm fp i n s ro; f z y sii g mo i u z ld n de; s e pe d
滑模控制在液压伺服系统的压力控制

滑模控制在液压伺服系统的压力控制一、液压伺服系统概述液压伺服系统是一种将输入信号转换成输出力或扭矩的控制装置,广泛应用于工业自动化、航空航天、机器人技术等领域。
液压伺服系统的核心在于其能够精确地控制液压油的流量和压力,从而实现对负载的精确控制。
这种系统通常由液压泵、伺服阀、执行器(如液压缸或马达)、传感器和控制器组成。
1.1 液压伺服系统的基本组成液压伺服系统的基本组成包括以下几个部分:- 液压泵:提供系统所需的压力油源,是系统的动力源。
- 伺服阀:根据输入信号控制液压油的流向和流量,是系统的控制核心。
- 执行器:将液压能转换为机械能,驱动负载运动。
- 传感器:检测系统状态,如压力、位置、速度等,为控制器提供反馈信号。
- 控制器:根据预设的控制策略,处理输入信号和反馈信号,输出控制指令。
1.2 液压伺服系统的特点液压伺服系统具有以下特点:- 高精度:能够实现对负载的精确控制,满足高精度运动控制的需求。
- 大力矩:液压系统能够产生较大的力和力矩,适用于重载应用。
- 快速响应:液压系统响应速度快,能够快速响应控制指令。
- 可调节性:通过调整控制参数,可以适应不同的工作条件和负载变化。
二、滑模控制在液压伺服系统中的应用滑模控制是一种非线性控制策略,它通过设计一个滑动面,使系统状态在该面上滑动,从而达到控制目标。
在液压伺服系统中,滑模控制可以有效地提高系统的稳定性和鲁棒性,尤其是在面对外部干扰和系统参数变化时。
2.1 滑模控制的基本原理滑模控制的基本原理是设计一个滑动面,当系统状态在滑动面上时,系统输出达到期望值。
控制律的设计使得系统状态在滑动面上滑动,直到达到期望状态。
滑模控制具有以下特点:- 快速收敛:系统状态能够快速地达到并保持在滑动面上。
- 鲁棒性:对系统参数变化和外部干扰具有较好的鲁棒性。
- 易于实现:滑模控制算法相对简单,易于在实际系统中实现。
2.2 滑模控制在液压伺服系统中的应用在液压伺服系统中,滑模控制可以应用于压力控制、位置控制和速度控制等多个方面。
电液伺服系统滑动模态变结构控制

电液伺服系统滑,佟庆 雨2 ,林子琦 ,朱元华 ,贾志勇
r 西 安交通 大 学机 电工程 系.西安 70 4 ; 北机 电T 研 究所 .西 安 7 29 ; 北京机 械 上业 自动化 研究 所,北京 10 l ) 。 10 9 硅 109 0 01
,
’ ig M e h n c l n u ty Auom a o siue B n c a /a d sr l I  ̄ n I ttt / n
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Ee ti ie & Au om o i n r l lc r Dr c v t t Co to c
‘ 电气 自 动化 ) 0 0年 第 3 21 2卷 第 5期
滑 动模 态 控 制 器在 液压 伺 服 系统 中的应 用
胡 学军 ’ 滕 达 胡 林 文
K e wo ds sii g mo e h drulc s ro PI y r : ld n d y a i e y D r b sn s la n v o u te s y pu o
O 引言
在液压伺服精确定位系统设计 的过程 中, 系统会受到各种不确
定 性 因素 的影 响 ,如 系统 模 型建 立 过 程 中各类 假 设 及简 化 、液压 伺
H u jn T n a H iw n u X e e g D 2 uL n e u
(,. Sho o l tcl n n r ainE gnen , W h nIstt o ehooy W hnH bi 3 0 4 C i ) 12 colfEe r a adI om t n i r g ci f o ei ua tu cnl , ua ue 4 0 7 , h a n i e fT g n
tms ae no c u ae wh l h o v nina D o to a no v r o e i ac ft e e f co s I r e o fnd a mo e e e tv e r ta c r t, ie t e c n e to lPI c nr lc n to e c me t mp to h s a t r. n o d rt h i r f c ie c nr lsrt ge , a ay e me o s b s d o a n v sii g mo e c n r lsr tg o to tae is n lr t d a e n Ly pu o ld n d o to ta e y. Att e s m e tme o a h e e t e ie e e t s h a i ,t c i v he d srd f c , h
关键词 : 性 I
Lau o yp nv
[ 图分 类 号 ]P 7 【 献标 识码 】 ( 章 编 号 】003 8 (o o o —0 70 中 T 25 文 A 文 10 .8 6 2 ] ) 50 1-3
Ap l a in o iig M o e Co tol d a l pi t fSl n d n r l i Hy r ui Sero Sy t m c o d er n c v se
sl t h p rp a - a xadtekv u,adtruhteot i t no a e b ie ecu l gb tenprm t s e c teap r t Q m t n a e n o g pi z i f vl sot ndt opi ew e aa e r. e oie i r h l h h m ao k u a h n e
( . C l g ca i l n i e n n uo ai ,H a i nvr @ Q a zo u a 6 0 1 C ia 3 o e eo Meh nc g n r ga dA tm t n u q o U i s , u nh u F f n3 2 2 , hn ) l f aE ei o a ei i
= x+ ( / , ) A B u+ ( t )
因 素带 来 的影 响 。 了 寻求 一种 较 为 有 效 的控 制 策 略 , 析 了基 于 L au o 方 法 的 滑 动 模 态 控 制 策 略 。 时 为达 到期 望 效 果 , 为 分 ypn v 同 选 取 了合 适 的 Q阵 和 k值 , 通 过 对 k值 的 优 化 , 出 了参 数 间的 耦 合 作 用 。最 后 通 过 实 例 仿 真 分析 , 明 了滑 动模 态控 制 策 略在 并 得 证 液 压 伺 服 系 统 中 具有 很 好 的鲁 棒 性 。
Ab ta t T e t e h d a l e v y tm u o t e e itn e o a it fo ti e i tr r n e fc o s ld t h y a c b h vo f e ls s sr c : h r y r u i s r o s se d e t h xse c fa v r y o u s n e f e c a t r, e o t ed n mi e a iro a y — u c e d e r
F n ly a x mp e smu ain an y i r v st a ldng mo o t lsrt g n hy r u i e v y t m a o d rbu t e s i al , n e a l i lto a ssp e tsi i de c n r ta e y i d a lc s r o s se h s g o o sn s . l o h o
福 6 0 1 (、.武 汉 工 程 大 学 电 气信 息 学 院, 北 武 汉 4 0 7 )3 12 湖 3 0 4 ;.华侨 大 学 机 电及 自动 化 学 院 , 建 泉 州 3 2 2 )
摘
要: 真实 的液压伺服系统由于受外 界存在 的各种干扰 因素 的影响 , 导致了系统 的动力学行为不准确 , 而常规 PD控制无法 克服这些 I