最新第二节 刚体转动的动能定理
03-1刚体定轴转动的动能定理和转动定律 (2)
定轴转动
非定轴转动
刚体的自由运动:
既平动又转动:质心的平动加绕质心的转动
刚体的一般运动 质心的平动
+
绕质心的转动
二.刚体定轴转动的运动学
角位置
(t )
>0 <0
0
z
(t )
p
{
逆时针转动 顺时针转动
x
转动平面
参考轴
d 角速度 dt
方向:右手螺旋定则
1 1 2 2 F R d R F d J J 0 0 T 0 T 2 2 1 1 1 1 2 2 2 mgh mv mv0 ( J J 02 ) 2 2 2 2
FN
FT FT
o P'
FT
m
FT
物体由静止开始下落
拉力 FT 对圆盘做功,由刚体绕定轴转 动的动能定理可得
1 1 2 2 mgh R FT d mv mv0 0 2 2
FT
0
FT Rd R FT d
0
P
m
R
o
m' h m
FN
FT
m
1 2 1 2 J J 0 2 2
o P'
1 E k J 2 2
刚体 转动 动能
1 2 平动动能 Ek mv 2 比较: 1 转动动能 Ek J 2 2
d d d d d d dd J J J J J J M JJ 4 定轴转动的动能定理 d d dt d dt d dt dt 2 2 2 2 1 11 2 2 1 2 2 Md J d J J W Md J d J J 2 12 1 1 2 1 1 1 22 2
刚体动能定理
人和杆:J = Jm+ JM, ω = 2.3 人和杆:
(1− cosθ )
人: J = JM
ω′ = 4.85 (1− cosθ )
∴ω′ ≈ 2ω
∆t ≈ 2∆t′
P17习题集: (一)5,7; (二)4,6
=θ时
m、L 、
θ
mg θ r2
M2 = r2mg sin θ L = mg sin θ ,⊗ 2
M2 3 g ∴α2 = = sin θ ,⊗ J 2L
杆在转动的过程中,仅有重力作功,故机械能守恒。 杆在转动的过程中,仅有重力作功,故机械能守恒。
θ = π/2 时 ,Ep1 =0,Ek1= 0 , θ = θ 时, Ep2 = -mg(L/2)cos θ, ( )
θ
mg
解:(1)水平位置 :( )
∴M1 = r1mg sin
θ =π/2 π r r r r r M = r × mg M = Jα 1 1 π
2
m L
θ
mg
r1
L = r1mg = mg ⊗ 2
L M1 2 mg 3g ∴α1 = = = 1 2 2L J L 3
(2)当 θ )
r r r M2 = r2 × mg
ri
刚体的 转动动能
1 2 2 Ek = ∑Eki = ∑( ∆mi ri ω ) 2 i i
1 1 2 2 = (∑∆mi ri )ω = Jω2 2 i 2
2.动能定理 动能定理
dω dW = Mdθ = J dθ = Jωdω dt
W =∫
ω2 ω1
1 1 2 2 Jωdω = Jω2 − Jω1 2 2
定理:刚体绕定轴转动时, 定理:刚体绕定轴转动时,合外力矩对刚体所 作的功,等于刚体转动动能的增量。 作的功,等于刚体转动动能的增量。
§7.4刚体定轴转动的动能定理
5mg 解得: N N n 2
小 结 刚体定轴转动
M I
质点直线运动
F ma
0
Mdt I I
功
Fdt mv mv
0
1 转动动能 Ek I 2 2 A Md 1 1 2 2 Md I I 0 2 2 重力势能 E p mghc
例2
解法二:刚体定轴转动的机械能守恒定律
[分析:以杆和地球为一系统,只有 mg 作功, 机械能守恒.] 选择水平位置为杆的势能零点,开始时 E0 0 1 2 l 至杆与水平线夹角为 时 E I mg sin 2 2 1 l 2 N I mg sin 0 2 2 O mg 3g sin 解得: l 1 mg vc 3 gl sin 2
mghc
决定于刚体重心距势能零点的高度。
五、刚体的机械能
1 2 E Ek E p I z mghc 2
刚体的机械能守恒定律:
若只有重力做功,则刚体机械能保持不变。
例1
已知:滑轮为匀质圆柱,质量为m1,半径为R质量 为m2的重物由静止下落h,求重物下落h后的速度。 解1:质点和刚体定轴转动的动能定理
外 k
k0
由于刚体内力作功的代数和为零
1 1 2 2 A外 2 I z 2 I z 0
内容: 刚体绕定轴转动时,转动动能的增量 等于刚体所受外力矩做功的代数和。
四、刚体的重力势能
E pi mi ghi mi gyi E p mi gyi
my mg m
i i i
m 2 gh v 2 m1 2m 2
例1
解2:质点系动能定理:
3-3刚体定轴转动的动能定理

一 、力矩作功
元功
d
dA F cos ds Fr cos d
π cos sin
2
o
dA Fr sind Md
力矩所作的功等于力矩和角位移的乘积.
v
F
dr
r
x
恒力矩的功 A M
变力矩的功
A 2 Md 1 第三章 刚体的定轴转动
选择细棒在竖直位置时点 C
的位置为重力势能零点
mg
l 2
1 2
1 3
ml 2
2
3g
l
vA l 3gl
vC
l
2
l 2
3gl
第三章 刚体的定轴转动
3-3 刚体定轴转动的动能定理 力矩的功率 P dA M d M
dt dt
力矩的功率等于力矩和角速度的乘积.
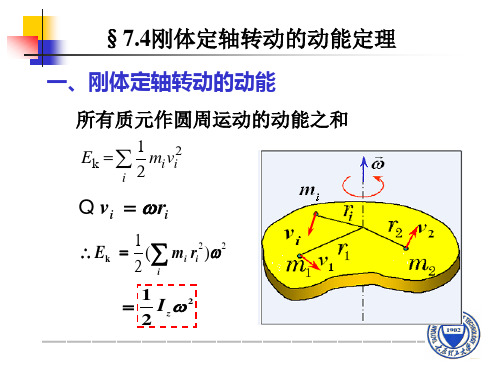
三、刚体的转动动能
i
12mi vi2
1( 2
i
miri2 ) 2
1 2
J 2
Ek
1 2
J2
转动动能等于刚体的转动惯量与角速度平方 乘积的一半.
第三章 刚体的定轴转动
3-3 刚体定轴转动的动能定理
刚体的重力势能 Ep mghc
刚体的重力势能等于刚体所受重力和刚体质心 高度的乘积.
刚体的机械能为转动动能和重力势能之和。
E
1 2
J2
mghc
质点、定轴转动的刚体组成的物体系统,功能原理
Ae Ain Ek2 Ep2 Ek1 Ep1
第二节 刚体转动的动能定理

§ 3.2 刚体转动的动能定理一、力矩的功 1 力矩的定义若作用的质点上的力为F ,则将r ×F 定义为力F 对O 点的力矩,记为M 。
M r F =⨯M 、F 、r 三者的方向构成右手螺旋关系。
大小:方向:右手法则2 力矩的功设:;转盘上的微小质量元Δm 在力F 作用下以R 为半径绕O 轴转动,在dt 时间内转过角度d θ, 对应位移d r,路程ds,此时F 所做的元功为则总功为二、转动惯量设初速为零,质量元Δm 的动能为转盘的总动能1 定义:为物体的转动惯量。
FtF nF tF d rt t d d d d A F r F s F r θ=⋅==d d A M θ=21d A M θθθ=⎰αrsin t M Fr F rα==tF d r12ki i iE m v =212k ki i i i i E E m ==∆∑∑v 221()2i i i m r ω=∆∑2i i iI m r =∆∑意义:由质量和质量对于转轴的分布情况决定。
描述转动的惯性。
例:一头粗,一头细的杆以不同端作轴转动是,其转动惯量不同。
单位:SI 制 kg m 22 定轴转动物体转动惯量的计算 质量不连续分布的质点系:转动惯量定义为各个质点对该定轴的转动惯量之和2i i iI m r =∑质量连续分布的刚体:转动惯量定义为各个质点对该定轴的转动惯量的积分。
2mI r dm =⎰转动惯量的大小不仅取决于物体的质量,还与质量的分布和轴线的位置有关。
例1 求小球m 的转动惯量。
解:m 看作质点 I = m R 2例2 质量为m 的细圆环,求I 。
解:把环分成无限多个质量为dm 的小段,对每个d m 有d J = R 2对整个环有I = ⎰ R 2d m = mR 2例3质量m ,半径 R 的薄圆盘,求I 。
解:把盘分成无限多个环。
取其中的一个环(半径r ,宽d r ,质量 d m ),d mR•R• m其转动惯量 d I = r 2d m22mdm rdr Rππ=整个盘的转动惯量22322200002122R R RRm m I dI r dm r rdr r dr mR R R ππ=====⎰⎰⎰⎰例4 长为L 、质量为m 的细长直杆,转轴垂直于细杆且通过杆中心 解:杆长为L,质量为m, 则密度为 ρ=m / L 。
高中物理奥林匹克竞赛——4.4刚体定轴转动的动能定理(共21张ppt)

下;轴和棒之间没有摩擦
力,轴对棒作用的支承力N
垂直于棒和轴的接触面且
通过O点,在棒的下摆过
G
程中,此力的方向和大小
是随时改变的。
A
A
定轴转动的动能定理
在棒的下摆过程中,对转轴O而言,支撑力N通过
O点,所以支撑力N的力矩等于零,重力G的力矩则
是变力矩,大小等于mg(l /2) cos ,棒转过一极
以刚体和地球为系统,取地面为零势能参考点,
刚体的重力势能 等于各质量元重力势能之合。
即
Ep
mi ghi
mg mihi m
mghc
结论:刚体的重力势能应等于质量集中于质心的重
力势能.
五、刚体的机械能守恒定律
刚体作为特殊的质点组,但作用在刚体上 的力均为保守力时,刚体的机械能守恒
Ek Ep 恒量
小的角位移d 时,重力矩所作的元功是
dA mg l cosd
2
在使棒从水平位置下摆到竖直位置过程中,重力
矩所作的功是
A dA
02
mg
l 2
cosd
mg l 2
应该指出:重力矩作的功就是重力作的功,也可
用重力势能的差值来表示。棒在水平位置时的角
速度0=0,下摆到竖直位置时的角速度为 ,按 力矩的功和转动动能增量的关系式得
皮带传动机构中,电动机的传动轴是主动轮,
飞轮是从动轮。两轮的转速与轮的直径成反比,即
飞轮的转速为
n飞
n电
d电 d飞
定轴转动的动能定理
由此得飞轮的角速度
2n飞 2n电 d电
60
这样飞轮的转动动能是
60 d飞
Ek
1 J 2
2
刚体力学第2讲——定轴转动中的功能关系、刚体的角动量定理和角动量守恒定律
第二阶段是碰撞过程。因碰撞时间极短,自由的冲力极大, 物体虽然受到地面的摩擦力,但可以忽略。这样,棒与物体 相撞时,它们组成的系统所受的对转轴O的外力矩为零,所 以,这个系统的对O轴的角动量守恒。我们用v表示物体碰撞 后的速度,则
1 1 2 2 ml mvl ml 3 3
(2)
式中’为棒在碰撞后的角速度,它可正可负。 ‘取正值, 表示碰后棒向左摆;反之,表示向右摆。
第三阶段是物体在碰撞后的滑行过程。物体作匀减速直线运 动,加速度由牛顿第二定律求得为
mg ma
由匀减速直线运动的公式得
(3)
0 v 2as
2
亦即
v 2 2gs
(4)
由式(1)、(2)与(4)联合求解,即得
R R/2
v
解:取人和盘为系统,
M外 0
R/2 R
系统的角动量守恒.
(1)开始系统的角动量为
2
o
v
1 1 R 2 m 0 M R 0 2 2
1 2 1 m R mE M R2 ME 后来: 4 2
mE ME mM
刚体力学第2讲——定轴转动中 的功能关系、刚体的角动量定理 和角动量守恒定律
主要内容
一、刚体转动动能定理 二、刚体的角动量守恒
一、转动动能定理
(一)力矩的功
W
2 1
M d
(二)转动动能定理
W Ek 2 Ek1
1 Ek J 2 2
(三)刚体的重力势能
(三) 刚体的重力势能
例2:两个共轴飞轮转动惯量分别为J1、J2, 角速度分别为 1 、2,求两飞轮啮合后共 同的角速度 。啮合过程机械能损失。
刚体定轴转动的动能定理 ppt课件
联立求解,得: v 2 m2 gh m1 2m2
R m1
m2
h
上页 下页 返回 结束
第七章 刚体力学 [例题2](P234)均质杆的质量为m,长为l,一端为光滑的支 点.最初处于水平位置,释放后杆向下摆动,如图所示. (1)求杆在图示的竖直位置时,其下端点的线速度v; (2)求杆在图示的竖直位置时,杆对支点的作用力.
m2
h
FT R
1 2
I 2
1 4
m1R2 2
上页 下页 返回 结束
第七章 刚体力学
R h v R
联立求解,得: v 2 m2 gh m1 2m2
解法 2. 利用质点系动能定理求解 将转动柱体、下落物体视作质点系
R m1
m2
h
由质点系动能定理
m2 gh
1 2
m2v 2
1 2
I 2
1 2
m2v 2
1 2
(1 2
m1R2 )
2
v R
联立求解,得: v 2 m2 gh m1 2m2
上页 下页 返回 结束
第七章 刚体力学
解法 3.利用转动定律求解
m2g - T m2a(1)
TR I 1 mR2 (2)
2
a r (3)
上页 下页 返回 结束
三、 刚体的重力势能
第七章 刚体力学
刚体的重力势能等于各质量元重力势能之和。
Ep
mi gyi (
mi yi )g
m(
mi yi )g m
Ep mgyc
刚体的重力势能与把质量全部集中在质心处的一 个质点的重力势能相等.
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
§ 3.2 刚体转动的动能定理
一、力矩的功 1 力矩的定义
若作用的质点上的力为F ,则将r ×F 定义为力F 对O 点的力矩,记为M 。
M r F =⨯
M 、F 、r 三者的方向构成右手螺旋关系。
大小:
方向:右手法则
2 力矩的功
设:;转盘上的微小质量元Δm 在力F 作用下以R 为半径绕O 轴转动,在dt 时间内转过角度d θ, 对应位移d r,路程ds,此时F 所做的元功为
则总功为
二、转动惯量
设初速为零,质量元Δm 的动能为
转盘的总动能
1 定义:
为物体的转动惯量。
F
t
F n
F t
F d r
t t d d d d A F r F s F r θ
=⋅==d d A M θ=2
1
d A M θθθ
=⎰α
sin t M Fr F r
α==t
F d r
12
ki i i
E m v =21
2
k ki i i i i E E m ==∆∑∑v 22
1()2i i i m r ω=∆∑2i i i
I m r =∆∑
意义:由质量和质量对于转轴的分布情况决定。
描述转动的惯性。
例:一头粗,一头细的杆以不同端作轴转动是,其转动惯量不同。
单位:SI 制 kg m 2
2 定轴转动物体转动惯量的计算 质量不连续分布的质点系:转动惯量定义为各个质点对该定轴的转动惯量之和
2i i i
I m r =∑
质量连续分布的刚体:转动惯量定义为各个质点对该定轴的转动惯量的积分。
2m
I r dm =⎰
转动惯量的大小不仅取决于物体的质量,还与质量的分布和轴线的位置有关。
例1 求小球m 的转动惯量。
解:m 看作质点 I = m R 2
例2 质量为m 的细圆环,求I 。
解:把环分成无限多个质量为dm 的小段,对每个d m 有
d J = R 2
对整个环有
I = ⎰ R 2d m = mR 2
例3质量m ,半径 R 的薄圆盘,求I 。
解:把盘分成无限多个环。
取其中的一个环(半径r ,宽d r ,质量 d m ),
d m
R
•
R
• m
其转动惯量 d I = r 2d m
2
2m
dm rdr R
ππ=
整个盘的转动惯量
2
2
3222000
021
22R R R
R
m m I dI r dm r rdr r dr mR R R ππ=====⎰⎰⎰⎰
例4 长为L 、质量为m 的细长直杆,转轴垂直于细杆且通过杆中心 解:杆长为L,质量为m, 则密度为 ρ=m / L 。
以杆中心O 点为转轴,在距o 点为r 处取微小质量元dm =ρdr, 杆的转动惯量为
例5 转轴垂直于细杆且通过杆的一端 以杆中心O /点为转轴,同上
2
22
2
22
322
13l l l
l l
l
I r dm r dr r ρρ---=
=
=⎰⎰
2
112
I mL
=
2
1
3
I mL
=
2020
313
l
l
l
o I r dm
r dr
r
ρρ===⎰⎰
3 几种典型的匀质刚体的转动惯量
4 影响转动惯量的三个因素
(1)刚体自身的性质如质量、大小和形状;
(2)质量的分布; (质量分布越靠近边缘转动惯量越大) (3)转轴的位置。
(同一个刚体对不同的轴转动惯量不同) 5 平行轴定理和转动惯量的可加性 1) 平行轴定理
设刚体相对于通过质心轴线的转动惯量为Ic ,相对于与之平行的另一轴的转动惯量为I ,则可以证明I 与Ic 之间有下列关系 2c I I md =+ 2)转动惯量的可加性
对同一转轴而言,物体各部分转动惯量之和 等于整个物体的转动惯量。
例6质量m ,长为l 的均匀细棒,求对于通过质心的垂直轴的转动惯量Jc 和通
2
c I I m
d =+
过端点a 的垂直轴的转动惯量J.
解:建立如图坐标Ox
2
2222
2
2
112
l l c l l m J x dm x dx ml l
++
--
=
=
=
⎰
⎰
由平行轴定理有
2
2211
1223a l J ml m ml ⎛⎫=+= ⎪⎝⎭
2
c 1
2I mR =2c 12
I mR =
如果刚体偏心转动,转轴通过半径的中点且垂直于盘面。
求盘对此轴的转动惯量I 。
解:题给两平行轴之间的距离
1
2
d R =
2
c I I m
d =+得刚体绕偏心轴的转动惯量
22213
()224
R I mR m mR =
+=由平行轴定理
例 3-2 如图所示,一圆盘状刚体的半径为 R ,质量为 m ,且均匀分布。
它对过质心并且垂直于盘面的转轴的转动惯量用Ic 表示。
例3-3 如图所示,某装置由均质细杆和均质圆盘构成。
杆的质量为 ,长 L 。
杆对O 轴的转动惯量 2
111
3
I m L =1
m
圆盘质量是 ,半径为R 。
,得知它对过质心C 且垂直于盘面的转轴的转动
惯量为 2m
22c 21
2I m R
=求此装置对轴O 的转动惯量I 。
x
三、刚体绕定轴转动的动能定理 1 刚体绕定轴转动的转动动能
2 动能定理
合外力矩对绕定轴转动的刚体所作的功等于刚体转动动能的增量。
刚体作为一个特殊的质点系,此质点系的动能定理为
21
e k k A E E =-2
1
2 2 2 111d θωω22
θM I I =
-⎰ θ
刚体定轴转动的动能定理
解:已知杆对轴O 的转动惯量
盘对轴C 的转动惯量
22c 21
2
I m R =
由平行轴定理得盘对轴O 的转动惯量
22c 2(I I m R L =++2221
(2
m R m R L =
++由转动惯量的可加性,得整个装置对轴 O 222
1212211
()32
I I I m L m R m R L =+=+++2111
3
I m L =
222
2k 111222
i i i i
i i E m v m r I ωω=
==∑∑ 由于刚体的大小、形状不变,其上任何两质点间没有相对位移。
即: i 0
A =。