工业机器人设计大作业
机器人技术及应用-大作业1
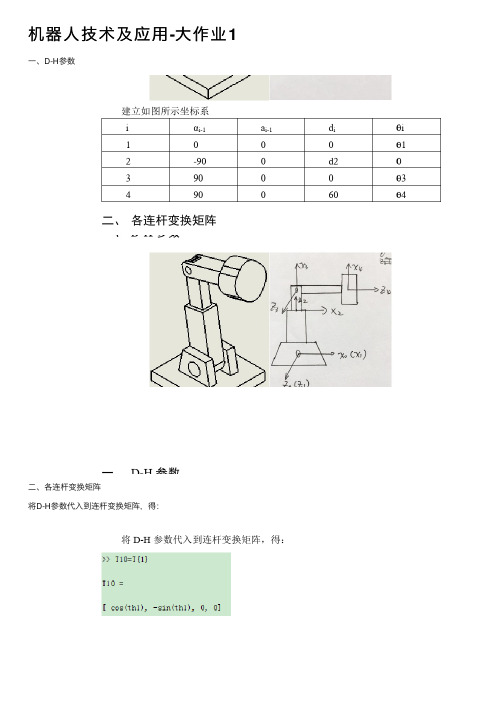
机器⼈技术及应⽤-⼤作业1⼀、D-H参数⼆、各连杆变换矩阵将D-H参数代⼊到连杆变换矩阵,得:三、各连杆⾄末端连杆的变换矩阵T43=T43T42=T32*T43;T41=T21*T42;Matlab 编程:clcclear allsyms af a d th realsyms d2 th1 th3 th4 realDH=[ 0 0 0 th1 ;-90 0 d2 0 ;90 0 0 th3 ;90 0 60 th4 ]; %DH参数for i=1:4af=DH(i,1) ; %取出DH参数a=DH(i,2) ;d=DH(i,3) ;th=DH(i,4);T{i}=[cos(th) -sin(th) 0 a;sin(th)*cos(af) cos(th)*cos(af) -sin(af) -d*sin(af) ; sin(th)*sin(af) cos(th)*sin(af) cos(af) d*cos(af) ;0 0 0 1 ] ; %连杆变换⽅程endT10=T{1}T21=T{2}T32=T{3}T43=T{4}T42=T32*T43T41=T21*T42四、雅可⽐矩阵雅可⽐矩阵结果:Matlab编程:clcclear allsyms d2 realsyms th1 th3 th4 realT21 =[ 1, 0, 0, 0;0, cos(90), sin(90), d2*sin(90);0, -sin(90), cos(90), d2*cos(90);0, 0, 0, 1];T32 =[ cos(th3), -sin(th3), 0, 0;cos(90)*sin(th3), cos(90)*cos(th3), -sin(90), 0;sin(90)*sin(th3), sin(90)*cos(th3), cos(90), 0;0, 0, 0, 1];T44=[ 1, 0, 0, 0;0, 1, 0, 0;0, 0, 1, 0;0, 0, 0, 1];T43 =[ cos(th4), -sin(th4), 0, 0;cos(90)*sin(th4), cos(90)*cos(th4), -sin(90), -60*sin(90); sin(90)*sin(th4), sin(90)*cos(th4), cos(90), 60*cos(90); 0, 0, 0, 1];T42=T32*T43n1=T41(1:3,1);o1=T41(1:3,2);a1=T41(1:3,3);p1=T41(1:3,4);n2=T42(1:3,1);o2=T42(1:3,2);a2=T42(1:3,3);p2=T42(1:3,4);n3=T43(1:3,1);o3=T43(1:3,2);a3=T43(1:3,3);p3=T43(1:3,4);n4=T44(1:3,1);o4=T44(1:3,2);a4=T44(1:3,3);p4=T44(1:3,4);Sp1=[0 -p1(3) p1(2);p1(3) 0 -p1(1);-p1(2) p1(1) 0] ; %位置⽮量的反对称矩阵Sp2=[0 -p2(3) p2(2);p2(3) 0 -p2(1);p2(2) p2(1) 0];Sp3=[0 -p3(3) p3(2);p3(3) 0 -p3(1);p3(2) p3(1) 0];Sp4=[0 -p4(3) p4(2);p4(3) 0 -p4(1);p4(2) p4(1) 0];pxn1=Sp1*n1;pxo1=Sp1*o1;pxa1=Sp1*a1;pxn2=Sp2*n2;pxo2=Sp2*o2;pxa2=Sp2*a2;pxo3=Sp3*o3;pxa3=Sp3*a3;pxn4=Sp4*n4;pxo4=Sp4*o4;pxa4=Sp4*a4;JL1=[pxn1(3) pxo1(3) pxa1(3)].' ;JL2=[pxn2(3) pxo2(3) pxa2(3)].' ;JL3=[pxn3(3) pxo3(3) pxa3(3)].' ;JL4=[pxn4(3) pxo4(3) pxa4(3)].' ;Ja1=[n1(3) o1(3) a1(3)].' ;Ja2=[n2(3) o2(3) a2(3)].' ;Ja3=[n3(3) o3(3) a3(3)].' ;Ja4=[n4(3) o4(3) a4(3)].' ;J1=[JL1 ; Ja1] ;J2=[JL2 ; Ja2] ;J3=[JL3 ; Ja3] ;J4=[JL4 ; Ja4] ;Jn=[J1 J2 J3 J4];JJn=vpa(Jn,2)五、关节驱动⼒如下图所⽰,杆各长设为li,受外⼒4F=(fx,fy)T静⼒传递:关节驱动⼒:设⼿抓坐标系原点受⼒:4F=[fx,fy,0]T 杆3受⼒:=fz fx f 033-=???=3030010*333fxl fzl fz fx l n杆2受⼒:-+=--===fz c fz s c fx s fz s s fx c fz fx c s s c c c s s s s c c f x R z R f R f 22112110*2202121121121)*,(*),(3321332322θθ-++-=?+=32232131321313332332322fxl c fxl fxl s c fzl s fxl s s fzl c f P n R n杆1受⼒:+---+=??-+-===fz c c fzs c fxs s fzs c fzs c fxs c s fzs fx c fz c fz s c fx s fz s s fx c c s s c f x R f R f 21)211(112)211(12112211211*110110001)*1,(22221211θ-+++++-=?+=321)231132(1132)231132(1213312221221211fxl c c s fxl c s fzl fxl s s fxl c s fxl c s fzl fxl c s s fxl fzl c f P n R n关节驱动⼒:关节1为转动关节:321)231132(11fxl c c s fxl c s fzl fxl s -++=τ关节2为移动关节:fz c 22=τ关节3为转动关节:33fxl -=τ六、速度与加速度分析操作臂的速度和加速度分析该机械⼿由四个关节组成,其中第⼆个关节为移动关节其余三个为转动关节,俩个连杆为l1和l2,应⽤递推法对末端构件的速度、⾓速度和雅克⽐矩阵计算如下所⽰,平⾯简图如下所⽰。
《机器人作业设计方案-2023-2024学年科学冀人版2001》
《机器人》作业设计方案一、作业目标:通过本次作业设计,学生将能够深入了解机器人的定义、分类、应用领域以及未来发展趋势,培养学生对科技创新的兴趣和探索精神,提高学生的科学素养和创新能力。
二、作业内容:1. 了解机器人的定义和分类:让学生通过查阅资料或观看视频,了解机器人的定义以及常见的分类方式,包括按用途分类、按结构分类等。
2. 钻研机器人的应用领域:让学生选择一个特定的领域(如医疗、农业、工业等),深入钻研该领域中机器人的应用情况,并撰写一份报告。
3. 探讨机器人的未来发展趋势:让学生通过查阅资料或采访专家,了解机器人未来的发展趋势,包括人工智能、自主进修等方面的发展。
4. 设计一个简单的机器人:让学生结合所学知识,设计一个简单的机器人模型,并编写程序实现其基本功能,如挪动、抓取等。
5. 制作展示:让学生将设计的机器人模型展示出来,并向全班同砚介绍其功能和原理。
三、作业要求:1. 学生需要在规定的时间内完成所有任务,并按时提交作业。
2. 学生需要认真钻研机器人相关知识,确保作业内容准确全面。
3. 学生需要展示出对机器人的热情和探索精神,积极参与讨论和展示环节。
四、评分标准:1. 对机器人定义和分类的理解和描述是否准确清晰。
2. 对机器人应用领域的钻研是否深入,报告内容是否有价值。
3. 对机器人未来发展趋势的探讨是否有见地,是否能够提出合理的观点。
4. 设计的机器人模型是否符合要求,程序是否能够实现基本功能。
5. 展示环节是否生动有趣,能否清晰表达设计理念和原理。
五、作业安排:1. 第一周:学生开始钻研机器人的定义和分类,准备相关资料。
2. 第二周:学生选择一个特定的领域,深入钻研机器人的应用情况。
3. 第三周:学生探讨机器人的未来发展趋势,准备撰写报告。
4. 第四周:学生设计机器人模型,并编写程序实现其基本功能。
5. 第五周:学生准备展示材料,进行展示环节。
六、总结:通过本次作业设计,学生将能够全面了解机器人的相关知识,培养科学素养和创新能力,激发学生对科技的热爱和探索精神,为未来的进修和发展奠定坚实基础。
大作业(搬运机器人)

无锡科技职业学院中德机电学院
工业机器人技术大作业
设计题目搬运机器人设计与检修
学生姓名
系别控制系
专业
班级
授课教师龚运新
大作业的内容和要求(含技术要求、图表要求等):
1、论述搬运机器人的机械设计部分
⑴叙述搬运机器人机械各部分名称及功能
⑵各部件图纸设计及要求(最低画出一个部件图纸)
2、叙述搬运机器人电气设计各部分名称及功能
3、画出搬运机器人电气控制电路图
4、编写部分搬运机器人控制子程序
5、叙述搬运机器人故障检修方法
1。
(完整版)六自由度工业机器人毕业设计
摘要在当今轮毂制造业中,企业为提高生产效率,保障产品质量,普遍重视生产过程的自动化程度,工业机器人作为自动化生产线上的重要成员,逐渐被企业所认同并采用。
工业机器人的技术水平和应用程度在一定程度上反映了一个国家工业自动化的水平,目前,工业机器人主要承担着焊接、喷涂、搬运以及堆垛等重复性并且劳动强度极大的工作,工作方式一般采取示教再现的方式。
本文设计和研究了一个六自由度的工业机器人,用于生产线的进送料和装配。
首先,本文对生产线布局进行改造设计,提高生产的工作效率,然后,根据设计要求设计了机器人的整体方案和具体的机械结构,选择了合适的传动方式、驱动方式,设计了机器人的底座、大臂、小臂和手部的结构;并且对机器人的传动结构进行设计,机器人为六自由度关节型机器人,全部采用转动关节,关节处采用电机,减速机,齿轮传动机构,蜗轮蜗杆传动机构来实现各个自由度,从而实现所需的运动。
在此基础上,本文将设计该机器人的控制系统,采用PC+DSP运动控制卡的控制方式,确定了控制系统的总体方案,设计了PCI 总线接口电路和DSP。
关键词: 六自由度工业机器人;生产线;结构设计;控制系统;各位如果需要此设计的全套内容(包括二维图纸、中英文翻译、完整版论文、程序、答辩PPT)可加解。
AbstractIn the modern large-scale manufacturing industry, enterprises pay more attention on the automation degree of the production process in order to enhance the production efficiency, and guarantee the product quality. As an important part of the automation production line, industrial robots are gradually approved and adopted by enterprises. The technique level and the application degree of industrial robots reflect the national level of the industrial automation to some extent, currently, industrial robots mainly undertake the jops of welding, spraying, transporting and stowing etc. , which are usually done repeatedly and take playback way.In this paper ,I will design an industrial robot with six DOFs.First, I will transform line layout and design the structure of the baseto improve the work efficiency of production ,and then, according to the design requirements ,I design the robot mechanical structure of the overall plan and specific ,and chose the right means of transmission and drive mode,Then ,I design the big arm, the small arm and the end manipulator of the robot,and I design the transmission structure, This robot is a 6-DOF joint robot,These joints are all rotary joints, joints used motor, reducer, gear transmission, worm gear and worm drive mechanism to realize various degrees of freedom, so as to achieve the required movement.On this basis, this paper will design the control system of the robot, which controlled by PC and DSP motion control card, and determine the overall scheme of the control system, design DSP and PCI bus interface circuit .Keywords: 6-DOF industrial robot, line layout , structure design, the control system目录摘要 (I)Abstract ............................................................................................................. I I 第1章绪论 . (5)1.1 课题背景及研究的目的和意义 (5)1.2国内外在该方向的研究现状及分析 (6)1.3 本文的主要研究内容 (9)第2章生产线布局及总体方案的确定 (9)2.1 生产线布局方案 (9)2.1.1机械手 (10)2.1.2 工作流程 (10)2.1.3方案预期达到的目标 (11)2.2总体方案的设计 (11)2.2.1机构的选型 (11)2.2.2驱动方式的选择 (12)2.2.3 传动方案的选择 (13)2.2.4 总体结构方案设计 (14)2.2.5控制方案的设计 (17)2.2.6技术参数列表 (17)2.3 本章小结 (18)第3章结构的设计 (19)3.1 引言 (19)3.2 电机力矩的计算以及驱动电机的选择 (19)3.3减速器的设计 (21)3.4 腰部的设计 (21)3.5 手臂的设计 (22)3.5.1手臂的设计基本要求 (22)3.5.2大臂和小臂 (22)3.5.3连杆 (24)3.6手腕部的设计 (24)3.7末端执行器的设计 (24)3.8本章小结 (26)第4章传动系统的设计及校核 (26)4.1腰部蜗轮蜗杆设计及校核 (26)4.2 腕部传动系统设计及校核 (27)4.2.1传动方案 (27)4.2.2齿轮的设计及校核 (27)4.2.2.1齿轮组设计 (27)4.2.2.2 直齿圆锥齿轮的设计 (27)4.2.3 轴的设计 (27)4.3 本章小结 (29)第5章控制系统设计 (29)5.1 引言 (29)5.2 控制系统的设计 (29)5.2.1 控制系统的类型选择 (29)5.2.2 控制系统的硬件电路 (30)5.3 PCI的接口设计 (30)5.4 DSP的设计 (31)5.4.1 DSP概述 (31)5.4.2 DSP硬件电路 (31)5.4.3 DSP软件 (32)5.5本章小结 (32)结论 (32)参考文献 (34)致谢 (35)第1章绪论1.1 课题背景及研究的目的和意义轮毂制造业属于劳动密集型的行业,除了繁重的体力工作外,几乎每个工序都存在着对人体有害的污染源和潜在的工伤事故:热加工工序烫灼伤的危险,大量易燃易爆燃料及消耗材料时时刻刻威胁着操作手的安全;铝液除气除渣产生的有毒烟尘,机加工冷却液的有害蒸汽,以及涂装工序液体漆、粉漆、前处理药液等等都会严重影响工人的健康;无处不在的轰鸣及刺耳的噪音会使你情绪坏到极点。
工业机器人搬运码垛毕业设计

工业机器人搬运码垛毕业设计可以是一个非常有趣和具有挑战性的项目。
以下是一个可能的方案,供您参考:一、项目简介随着工业自动化的发展,工业机器人已经在许多领域得到广泛应用。
搬运码垛是工业生产中常见的一种作业,通过使用工业机器人可以实现高效、精准和无人化的搬运码垛作业。
本项目旨在设计一个能够实现搬运码垛功能的工业机器人系统。
二、设计内容机器人选型与配置首先,需要对机器人进行选型,选择适合搬运码垛作业的机器人型号。
需要考虑机器人的负载能力、运动范围、精度和稳定性等参数。
同时,还需要配置合适的控制器、伺服系统、传感器等硬件设备。
搬运码垛方案设计根据实际需求,设计合理的搬运码垛方案。
需要考虑搬运物料的种类、尺寸、重量等因素,以及码垛的目标位置和方式。
同时,还需要考虑机器人的运动轨迹、速度和加速度等参数。
控制系统设计设计机器人的控制系统,包括硬件和软件两部分。
硬件部分包括控制器、伺服系统、传感器等设备的选型和配置;软件部分包括控制算法的设计、运动控制程序的开发等。
人机交互界面设计为了方便操作和管理,需要设计一个人机交互界面。
界面应该具有实时监控、远程控制、参数设置等功能,并且要具备良好的用户体验。
系统调试与优化在完成硬件和软件的设计后,需要进行系统的调试和优化。
需要对机器人的运动轨迹、速度、加速度等参数进行调整,以保证机器人的稳定性和精度。
同时,还需要对控制系统进行测试和优化,以保证机器人的性能和可靠性。
三、总结通过本次毕业设计,您将能够掌握工业机器人系统的基本原理和技术,了解搬运码垛作业的流程和要求,并且能够独立设计一个具有实际应用价值的工业机器人系统。
这将为您未来的职业发展打下坚实的基础。
机器人技术大作业

《机器人技术》大作业(2015年秋季学期)题目工业机器人概述姓名学号班级专业机械设计制造及其自动化报告提交日期2015年12月5日哈尔滨工业大学内容及要求1.以某种机器人(如搬运、焊接、喷漆、装配等工业机器人;服务机器人;仿生鱼、蛇等仿生机器人;军用及其它机器人等)为例,撰写一篇大作业,题目自拟,以下内容仅作参考:1) 机器人的机械结构设计(包括各部分名称、功能、传动等);2) 机器人的运动学及动力学分析;3) 机器人的控制及轨迹规划;4) 驱动及伺服系统设计;5) 电气控制电路图及部分控制子程序。
2.题目自拟,拒绝雷同和抄袭;3.参考文献不少于7篇,其中至少有2篇外文文献;4.报告统一用该模板撰写,字数不少于5000字,上限不限;5.正文为小四号宋体,倍行距;图表规范,标注为五号宋体;6.用A4纸单面打印;左侧装订,1枚钉;7.提交打印稿及03版word电子文档,由班长收齐。
8.此页不得删除。
评语:成绩(20分):教师签名:年月日工业机器人概述机器人学是当今世界极为活跃的研究领域之一,它涉及计算机科学、机械学、电子学、自动控制、人工智能等多种学科。
随着计算机、人工智能和光机电一体化技术的迅速发展,机器人已经成为人类的好帮手。
在航空航天,深海探测中,往往使用机器人代替人类去完成复杂的极限工作任务。
工业机器人是一个多功能、多自由度的机械和电气一体化的自动机械设备和系统,它可以在制造过程中完成各种任务。
它结合制造主机或生产线,可以形成一个单一的或多台机器自动化系统,在无人参与下,实现搬运、焊接、装配和喷涂等多种生产作业。
目前,工业机器人技术飞速发展,在生产中的应用日益广泛,已成为现代制造业重要的生产高度自动化设备。
一、工业机器人特性自20世纪60年代美国第一代机器人的开始,工业机器人的发展和应用迅速发展起来,工业机器人的最重要的特性概括如下。
1、可编程。
生产自动化的进一步发展是柔性自动化。
工业机器人能根据工作环境不同、做出相应规划和变化,因而在小批量多品种的高效柔性制造过程可以起到很好的作用,是柔性制造系统(FMS)的重要组成部分。
【免费下载】工业机器人设计大作业

设计题目: 自动切割机
系 别: 机械系
专 业: 机械设计制造及其自动化
姓 名: 聂建波
郭锐
张少强
1
对全部高中资料试卷电气设备,在安装过程中以及安装结束后进行高中资料试卷调整试验;通电检查所有设备高中资料电试力卷保相护互装作置用调与试相技互术关,系电,力根通保据过护生管高产线中工敷资艺设料高技试中术卷资,配料不置试仅技卷可术要以是求解指,决机对吊组电顶在气层进设配行备置继进不电行规保空范护载高与中带资负料荷试下卷高问总中题体资,配料而置试且时卷可,调保需控障要试各在验类最;管大对路限设习度备题内进到来行位确调。保整在机使管组其路高在敷中正设资常过料工程试况中卷下,安与要全过加,度强并工看且作护尽下关可都于能可管地以路缩正高小常中故工资障作料高;试中对卷资于连料继接试电管卷保口破护处坏进理范行高围整中,核资或对料者定试对值卷某,弯些审扁异核度常与固高校定中对盒资图位料纸置试,.卷保编工护写况层复进防杂行腐设自跨备动接与处地装理线置,弯高尤曲中其半资要径料避标试免高卷错等调误,试高要方中求案资技,料术编试交写5、卷底重电保。要气护管设设装线备备置敷4高、调动设中电试作技资气高,术料课中并3中试、件资且包卷管中料拒含试路调试绝线验敷试卷动槽方设技作、案技术,管以术来架及避等系免多统不项启必方动要式方高,案中为;资解对料决整试高套卷中启突语动然文过停电程机气中。课高因件中此中资,管料电壁试力薄卷高、电中接气资口设料不备试严进卷等行保问调护题试装,工置合作调理并试利且技用进术管行,线过要敷关求设运电技行力术高保。中护线资装缆料置敷试做设卷到原技准则术确:指灵在导活分。。线对对盒于于处调差,试动当过保不程护同中装电高置压中高回资中路料资交试料叉卷试时技卷,术调应问试采题技用,术金作是属为指隔调发板试电进人机行员一隔,变开需压处要器理在组;事在同前发一掌生线握内槽图部内 纸故,资障强料时电、,回设需路备要须制进同造行时厂外切家部断出电习具源题高高电中中源资资,料料线试试缆卷卷敷试切设验除完报从毕告而,与采要相用进关高行技中检术资查资料和料试检,卷测并主处且要理了保。解护现装场置设。备高中资料试卷布置情况与有关高中资料试卷电气系统接线等情况,然后根据规范与规程规定,制定设备调试高中资料试卷方案。
工业机器人设计(含全套CAD图纸)
工业机器人设计(含全套CAD图纸)工业机器人设计摘要在生产过程工业机械手是模拟人手动作的机械设备,它可以替代人工搬运重物或单调,在高粉尘,高温,有毒,易燃,放射性和其他相对较差的工作环境。
机器人可用于在生产过程中的自动化抓住并移动工件自动化设备,它是在生产过程的机械化和自动化,开发出一种新的类型的设备。
近年来,随着电子技术,特别是计算机的广泛使用机器人的开发和生产的高科技领域已成为迅速发展起来的一项新兴技术,它更促进机器人的发展,使得机械手能更好地实现与机械化和自动化的有机结合。
机械手能够代替人类完成危险、减轻人类劳动强度、重复枯燥的工作,提高劳动生产力。
本设计是关于三自由度的圆柱形机械手。
利用Auto CAD软件对制件进行设计绘图。
其包括夹持器、小臂、大臂和底座。
明确合理的设计思路,确定了机械手工作原理并对然夹持器、气缸、步进电机、轴承进行了校核计算并附带了简图并对零件的质量、重心、惯性主轴和惯性力矩进行辅助设计计算,可以大大减轻在设计过程中繁琐计算及校核步骤。
关键字:机械手,气缸,校核。
IIIAbstractIndustrial manipulator is the mechanical equipment which is used in the production process and simulate to the behave of hands withelectrical integration. It can carry heavy objects and work in the harsh environment which is high temperature, poisonous ,full of dust,flammable and combustible monotonous and full of radioactive substance instead of people. Manipulator is a automatic device which is used in the automatic production process and it can carry and move things. It is a new device which is developed in the mechanization and automatic production process. In recent years , with the widely used of electronic technique especially the electronic computer. The research and production of robot has became a new technology which is developing rapidly in the high-tech industry . It promotes the development of manipulator. It makes the combination of the manipulator with mechanization and automation become easier . Manipulator can complete the dangerous and boring work instead of people. It can reduce labour intensity of people and raise the labour productivity .This design is a cylindrical manipulator which is related to delta degrees of freedom. It designs and draws the picture with Auto cad software ,it includes holder, a small arm, the big arm and the base. The clear and reasonable thinking determines the working principle of the manipulator . This also checks and calculates the holder, cylinder, stepper motor and bearing. Apart from this , it contains some pictures and design and measure the quality , barycentre principal axis ofinertia and force of parts. It can greatly reduce the complicated calculation and check in the design process.Keywords: robot, cylinder, checkingIV目录摘要 (III)ABSTRACT ............................................................... .... IV 目录 ..................................................................... ... V 1 绪论 ......................................................................1 1.1 本课题研究的内容和意义 ................................................. 1 1.2 国内外发展概况 ......................................................... 1 1.3 工业机械手设计内容 (2)1.4 机械手设计的作用 ....................................................... 2 1.5 工业机械手的分类和组成 ................................................. 2 2手部的设计 (5)2.1 机械手设计参数和运动方案 (5)2.1.1 运动方案 (5)2.1.2 驱动系统和位置检测装置的选择: ..................................... 5 2.2 手部设计的结构和计算 (6)2.2.1 机械手的基本要求 ................................................... 6 2.3 手部力的计算 .. (7)2.3.1 夹紧力的计算 (7)2.3.2 手爪驱动气缸的设计 (8)2.3.3 手部误差的分析 .................................................... 10 3 机械手臂的设计 ........................................................... 12 3.1 机械小臂设计 ..........................................................123.1.1 小臂驱动力的计算 (12)3.1.2 小臂驱动气缸的设计 (13),3.1.3 气缸筒壁厚的计算 (14)3.1.4 气缸的选用 (14)3.1.5 校核活塞的稳定性 (14)3.1.6 小臂刚度校核 (15)3.1.7 端盖的连接方式及强度计算 .......................................... 15 3.2 大臂的结构设计 (16)3.2.1 大臂的结构和要求 (16)3.2.2 驱动力的计算 (17)3.2.3 大臂驱动气缸的设计 (17)3.2.4 气缸的选择 (18)3.2.5 校核活塞的稳定性 (18)大臂刚度校核 .......................................................18 3.2.64 驱动系统设计 ............................................................. 20 4.1 轴承的设计 ............................................................204.1.1 轴承的选择 (20)轴承的计算: .......................................................20 4.1.24.1.3 轴承的寿命校核: (21)电机的基本情况和选择 .................................................. 22 4.24.2.1 电机的选则与计算 (22)4.2.2 注意事项 (23)4.2.3 工作原理 (23)4.2.4 步进电机的特点 ..................................................... 24 4.3 谐波减速器 (24)4.3.1 谐波减速器的简介 (24)4.3.2 谐波减速器的设计 ................................................... 25 4.4 腰座的结构 ............................................................ 26 5 总结 (27)致谢 ....................................................................28 参考文献 ...................................................................29 附录 .....................................................................30VI工业机器人设计1 绪论1.1 本课题研究的内容和意义机械工业是国民的基本部分。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
工业机器人设计设计题目:自动切割机系别:机械系专业:机械设计制造及其自动化姓名:聂建波 20094011222郭锐 20094011207张少强 200940112361目录引言工作原理设计切割部分设计1.1设计要求 (4)1.2工作原理 (4)1.3结构设计 (5)液压控制线路的设计2.1液压控制线路设计的一般要求 (9)2.2液压控制线路的设计方法 (9)参考文献 (10)引言机电一体化产品广泛应用各种加工业,切割技术也有了飞速的发展,手工切割已经适应不了现代工业发展的要求。
简单的机械手经过几十年的发展,如今已2进入以通用机械手为标志的时代。
几十年来,这项技术的研究和发展一直比较活跃,设计在不断的修改,品种也在不断的增加,应用领域也在不断的扩大。
简单的机械手是一种仿人操作、自动控制、的机电一体化自动化生产设备。
特别适合于多品种、变批量的柔性生产。
它对稳定、提高产品质量,提高生产效率,改善劳动条件和产品的快速更新换代起着十分重要的作用。
我们设计的铸棒线切割机结构简单,性能安全可靠,操作方便可行,很好的实现了其预定功能。
铸棒线切割机主要由三个大的部分组成,即切割部分、夹紧部分和纵横行走部分。
工作原理设计该工业机器人可进行粗切割和半精切割,切口深度为35mm。
切割部分是由电极带动砂轮旋转,由气缸控制砂轮上下移动完成切割。
夹紧部分主要采用了一个气动夹紧机械手,电磁阀控制气缸活塞的伸缩来实现夹紧和放松。
纵横行走部分是由气缸控制纵向、横向行走板,使之沿直线导轨前进或返回,实现三个自由度的运动。
整个机器由PLC控制各个气动换向阀的电磁铁,由气缸驱动完成顺序切割动作过程。
而随动工作台的随动前进速度也可以通过夹紧机械手夹紧铸棒使之与铸棒速度同步。
横向切割时的切割速度可以通过气缸来调节。
与一般的切割机相比,这种切割机有以下优点:一、实现了机械工程和自动控制的有效结合,机械部分采用机械优化设计,整个设计过程中都进行了综合技术比较与经济评价,实现了预定的功能。
二、整个运动过程都采用了气压传动控制,与液压传动相比,气压传动有无介质费用、处理方便、无泄露污染、无介质变质等优点。
三、在设计过程中,纵横行走装置采用了直线导轨,既提高了运动系统的运动精度,又很大程度的减小了摩擦力,达到了节能的效果。
3四、整个切割过程都由PCL控制,以其结构简单合理、设备性能良好、使用寿命长、安全系数高等因素,满足了自动化大批量的生产要求。
这种切割机具有控制方便,性能稳定,结构简单,调节、修改方便、生产率高等优点,具有广阔的应用前景。
切割部分设计1.1 设计要求项目要求切割机能够根据定长信号分别切割两条连续的铸铁棒,实现准确定长切割,切割后自动返回初始位置。
其切口深度为35mm。
再由压断机进行压断。
1.2 方案设计切割部分主要有砂轮、电动机和传动机构组成。
现在在切割部分有两种可行的方案:第一,电动机通过带传动带动砂轮片转动。
第二,电动机通过圆柱齿轮传动带动砂轮片转动。
考虑到切割过程中电动机带动砂轮高速旋转,所以优先选取第一种方案,因为圆锥齿轮传动不宜应用在转速太高的场合,而且运用齿轮传动时,还要考虑到这样消除震动和怎样润滑齿轮,这样就增加了设计成本。
图1-1 切割部分原理图45切割部分的原理如图1-1所示,电动机带动砂轮片高速旋转,电机与工作台之间采用铰支撑,液压缸1可推动砂轮片上下移动,完成切割。
液压缸2可推动工作台横向移动,控制切割的长度。
气缸3可使工作台纵向移动,使砂轮片能分别切割两根铸棒。
其中电动机和液压缸都通过电磁阀由PLC 机控制,从而实现其动作。
1.3 结构设计 1.3.1砂轮片的选取经过调研,切断能力为50 的砂轮片,其规格为322.3400⨯⨯mm ,所需电机的最小功率为2.2min =P kw ,转速为1n =2840 r/min, 砂轮片的最大线速度为70m/s 。
最终选取砂轮片的型号为TL-001型,其磨料为棕刚玉,粒度为20#]1[。
1.3.2 电机的选取根据砂轮片的要求,现选用比较常用的Y 系列三相异步电动机,这是由于Y 系列三相异步电动机的功率等级和安装尺寸与国外同类型的先进产品相当,因而具有与国外同类型产品之间良好的互换性,供配套出口及引进设备替换]2[。
选取功率为3.0KW ,满载时的转速为2870r/min 。
额定电流6.39A ,功率因数0.87,效率82%,额定转矩2.32m N ⋅]3[。
1.3.3 带传动设计1.确定计算功率由《机械设计》查得工作情况系数K =1.2则功率为6.332.1=⨯=⋅=P K P A ca (1-1)62.初选带的型号根据ca P 和1n ,由《机械设计》初选A 型普通V 带。
3.确定带轮的基准直径1d d 和2d d1)由《机械设计》查得A 型min d d =75mm,考虑到带轮太小,其弯曲应力过大,所以要使1d d ≥min d d ,取1d d =150 2)验算带的速度6.221006028401501006011=⨯⨯⨯=⨯⋅=ππn d V d m/s (1-2)因为 5m/s < 22.6m/s < 25m/s 带速符合要求。
3)计算2d d1212d d d n n d ⋅=(1-3)由于电机转速与砂轮转速基本同步,选速比 21n n=1,则2d d =1d d =150 mm4.确定中心距和带的基准长度 1)初选中心距由0.7(1d d +2d d )≤0a ≤2(1d d +2d d ),考虑到结构要求,初选0a =900 mm2121204)()(22'a d d d d a L d d d d d -+++=π(1-4)9004)150150()150150(290022+-+++⨯=π2270= mm72)最后确定中心距 7652227020009002'0=-+=-+=dd L L a a mm (1-5)则 7352000015.0765015.0min =⨯-=-=d L a a mm (1-6) 8252000030.0765030.0max =⨯-=+=d L a a mm (1-7) 最后取 825~735=a mm 。
5.验算带轮包角︒⨯--︒=60180121ad d d d α (1-8)︒⨯--︒=60765150150180︒>︒=120180 (合适) 6.确定带的根数'P P z ca ≥(1-9)其中: K P K K P P L a )('000∆+= )11(10ib K n K P -=∆由《机械设计》查得弯曲影响系数31003.1-⨯=b K 115015012===d d d d i由《机械设计》查得传动比系数05.1=i K 0)0.111(28801003.130=-⨯⨯⨯=∆-P kw由《机械设计》查得包角系数1=a K8由《机械设计》查得长度系数03.1=L K 采用非化纤结构的普通带,取材质系数75.0=K 由《机械设计》查得2.20=P kw 。
7.175.0)03.112.2('0=⨯⨯⨯=P kw12.27.16.3'0==≥P P z ca取3=z 根。
7.确定单根带的初拉力20)15.2(500qv K vzP F aca +-∙= (1-10)由《机械设计》查得1.0=q 916.221.0)10.15.2(36.226.350020=⨯+-⨯⨯⨯=F N (1-11)8.计算带对轴的压力 5462180sin39122sin 210=︒⨯⨯⨯==αz F Q N (1-12)9.带轮的设计 带轮的结构尺寸由于带轮的基准直径mm d d 150=,轴的直径mm d 30=,根据带轮的选择原则:即当 mm d d d 3000)3~5.2(≤≤ 时采用腹板式结构,铸造带轮的结构如图1-2所示。
图1-2 带轮的结构1.3.4 液压缸的选择1.选取气缸类型根据设计所用资料,现选取DNC标准气缸。
2.选择安装方式根据结构设计的要求,要实现砂轮片的上下移动完成切割,要求气缸在上下。
39参考文献[1] 徐灏. 机械设计手册. 北京:机械工业出版社,1991[2] Shigley J E, Uicher J J.Theory of machines and mechanisms .NewY ork:McGraw-Hill Book Company,1980[3] 蔡春源. 简明机械零件手册. 北京:冶金工业出版社,1996.3[4] 王德玺,裴垠欣. 机械设计. 北京:煤炭工业出版社,1999[5] D Y Y ang, C H Lee,Analysis of three-dimension-al extrusion of section through curle dies bycon-formal transformation[J] .International journal of Mechanics science,1978,(20)[6] Design and Performance of the Cycloid Speed Reducer. Machine Design. June,28 No13,1956[7] 陆鑫盛,周洪.气动自动化系统的优化设计. 上海:上海科学技术文献出版社,199510[8] Nikravesh P E. Computer-aided analysis of mechanical systems.[s.l]:Prentice-Hall Inc,1988[9] 许福玲,陈尧明. 液压与气压传动. 北京:机械工业出版社,2000.5[10] 国科精工(上海)有限公司.自润滑式线性导轨[11] 周军,海心. 气动控制及PLC. 北京:机械工业出版社,2001.8[12] 朱善君等.可编程序控制系统. 北京:清华大学出版社,1994[13] 孙桓,陈作模. 机械原理. 第五版. 北京:高等教育出版社,1996[14] Mattnies, Hans Jurgen.Einfuhrung in die plhydralik.Stuttgert,B.G.Toubner,198411。