机器人学导论 chapter4
机器人学 完整版
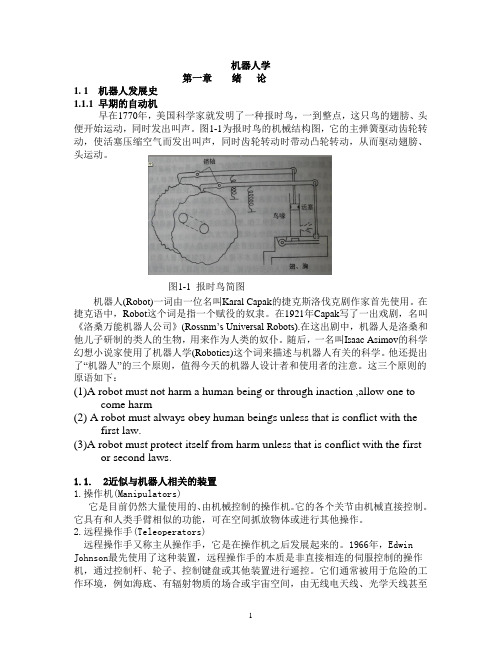
机器人学第一章绪论1. 1 机器人发展史1.1.1 早期的自动机早在1770年,美国科学家就发明了一种报时鸟,一到整点,这只鸟的翅膀、头便开始运动,同时发出叫声。
图1-1为报时鸟的机械结构图,它的主弹簧驱动齿轮转动,使活塞压缩空气而发出叫声,同时齿轮转动时带动凸轮转动,从而驱动翅膀、头运动。
图1-1 报时鸟简图机器人(Robot)一词由一位名叫Karal Capak的捷克斯洛伐克剧作家首先使用。
在捷克语中,Robot这个词是指一个赋役的奴隶。
在1921年Capak写了一出戏剧,名叫《洛桑万能机器人公司》(Rossnm’s Universal Robots).在这出剧中,机器人是洛桑和他儿子研制的类人的生物,用来作为人类的奴仆。
随后,一名叫Isaac Asimov的科学幻想小说家使用了机器人学(Robotics)这个词来描述与机器人有关的科学。
他还提出了“机器人”的三个原则,值得今天的机器人设计者和使用者的注意。
这三个原则的原语如下:(1)A robot must not harm a human being or through inaction ,allow one tocome harm(2) A robot must always obey human beings unless that is conflict with thefirst law.(3)A robot must protect itself from harm unless that is conflict with the firstor second laws.1.1.2近似与机器人相关的装置1.操作机(Manipulators)它是目前仍然大量使用的、由机械控制的操作机。
它的各个关节由机械直接控制。
它具有和人类手臂相似的功能,可在空间抓放物体或进行其他操作。
2.远程操作手(Teleoperators)远程操作手又称主从操作手,它是在操作机之后发展起来的。
(人工智能)人工智能机器人学导论
(人工智能)人工智能机器人学导论人工智能机器人学导论1简介:1作者简介2机器人控制器和程序设计3简介:3机器人制作入门篇6简介:6作者简介6机器人智能控制工程8简介:8人工智能机器人学导论作者:Ricky文章来源:本站原创更新时间:2006年05月03日打印此文浏览数:2370 SlidesforSecondEdition(Beta)Chapter1:WhatareRobots?.pptslidesandthepdfversion(goodaquicklook) Chapter2:Telesystems.thepdfversionChapter3:BiologicalFoundationsoftheReactiveParadigm.pptslidesandpdfversion Chapter5:TheReactiveParadigmChapter6:SelectingandCombiningBehaviorsChapter7:CommonSensorsandSensingTechniquesChapter8:DesigningaBehavior-BasedImplementationChapter9:Multi-AgentsChapter10:NavigationandtheHybridParadigmChapter11:TopologicalPathPlanningChapter12:MetricPathPlanningChapter13:LocalizationandMappingChapter14:AffectiveRobotsChapter15:Human-RobotInteractionChapter16:WhatCanRobotDoandWhatWillTheyBeAbletoDo?简介:本书系统地介绍了人工智能机器人于感知、导航、路径规划、不确定导航等领域的主要内容。
全书共分俩大部分。
机器人学导论717622504
机器人学导论学院:工程机械学院专业:机械工程*名:**学号:**********任课教师:***成绩:目录一、问题重述 (4)1.1、问题重述 (4)1.2 目标任务 (4)二、问题分析 (5)三、模型的假设 (6)四、符号说明 (6)五、模型建立与求解 (7)5.1运动学模型建立与求解 (7)5.1.1机器人运动方程的建立 (7)5.1.2 利用逆运动学方法求解 (10)5.2、问题1—1的模型 (11)5.2.1搜索算法流程图 (12)5.2.2、模型求解 (15)5.3、问题1—2、3的模型 (18)5.3.1、问题1的②、③ (18)5.3.2、问题2的② (20)5.3.3、问题2的③ (22)5.4、问题3 (25)七、模型的评价 (25)7.1.模型的优点 (25)7.2.模型的缺点 (25)参考文献 (26)摘要本文探讨了六自由度机械臂从一点到另一点沿任意轨迹移动路径、一点到另一点沿着给定轨迹移动路径、以及无碰撞路径规划问题,并讨论了设计参数对机械臂灵活性和使用范围的影响,同时给出了建议。
问题一:(1)首先确定初始坐标均为零时机械臂姿态,建立多级坐标系,利用空间解析几何的变换基本原理及相对坐标系的齐次坐标变换的矩阵解析方法,来建立机器人的运动系统的多级变换方程。
通过逆运动学解法和构建规划,来求优化指令(2)假定机械臂初始姿态为Φ0,曲线离散化,每个离散点作为末端位置,通过得到的相邻两点的姿态,利用(1)中算法计算所有相邻两点间的增量指令,将满足精度要求的指令序列记录下来。
(3)通过将障碍物理想化为球体,将躲避问题就转化成保证机械手臂上的点与障碍球球心距离始终大于r的问题。
进而通过迭代法和指令检验法,剔除不符合要求的指令,从而实现避障的目的问题二:将问题二中的实例应用到问题一中的相对应的算法中。
问题三:灵活性与适用范围相互制约,只能根据权重求得较优连杆长度。
关键词:多级坐标变换逆运动学解法遗传搜索算法优化一、问题重述1.1、问题重述某型号机器人(图示和简化图略)一共有6个自由度,分别由六个旋转轴(关节)实现,使机器人的末端可以灵活地在三维空间中运动。
(人工智能)人工智能机器人学导论
(人工智能)人工智能机器人学导论人工智能机器人学导论1简介:1作者简介2机器人控制器和程序设计3简介:3机器人制作入门篇6简介:6作者简介6机器人智能控制工程8简介:8人工智能机器人学导论作者:Ricky文章来源:本站原创更新时间:2006年05月03日打印此文浏览数:2370 SlidesforSecondEdition(Beta)Chapter1:WhatareRobots?.pptslidesandthepdfversion(goodaquicklook) Chapter2:Telesystems.thepdfversionChapter3:BiologicalFoundationsoftheReactiveParadigm.pptslidesandpdfversion Chapter5:TheReactiveParadigmChapter6:SelectingandCombiningBehaviorsChapter7:CommonSensorsandSensingTechniquesChapter8:DesigningaBehavior-BasedImplementationChapter9:Multi-AgentsChapter10:NavigationandtheHybridParadigmChapter11:TopologicalPathPlanningChapter12:MetricPathPlanningChapter13:LocalizationandMappingChapter14:AffectiveRobotsChapter15:Human-RobotInteractionChapter16:WhatCanRobotDoandWhatWillTheyBeAbletoDo?简介:本书系统地介绍了人工智能机器人于感知、导航、路径规划、不确定导航等领域的主要内容。
全书共分俩大部分。
机器人学导论第4章1PPT课件
即在易使工具与环境脱离接触或产生很大作用 力的方向采用柔顺控制。其方法是:假想在此方向, 末端刚度很低,对其采用力控制。
§4.2 力和力矩分析
4.2.1 力和力矩的平衡 这一节推导表示机械手静力学特性的基本方
程。我们首先考虑在开环运动链上的一个单独连 接的自由实体的图形。图4-1表示作用在连杆i上 的力和力矩。连杆i通过关节i+1与连杆i-1和连杆
第4章 力分析及柔顺控制
学习内容: 1 动力学分析 2 静力学分析 3 坐标系间力和力矩的变换 4 柔顺控制
学习重点: 1 动力学方程的简化 2 柔顺坐标系
为了使物体加速必须对其施加力,使旋转物体 产生角加速度必须对其施加力矩,所施加力、力 矩大小为:
Fma TI
为使机器人连杆加速,驱动器必须有足够大 的力、力矩驱动机器人连杆和关节,以使他们能 以期望的加速度和速度运动。为此,必须计算每 个驱动器所需的驱动力。设计者可根据这些方程 并考虑机器人外部载荷计算出驱动器可能承受的 最大载荷,并进而设计出能够提供足够力及力矩 的驱动器。
N i 1 , i N i , i 1 ( r i 1 , i r i , c i ) f i 1 , i ( r i , c i ) ( f i , i 1 ) 0i 1 , n ,(4
这里ri-1,i是从Oi-1到Oi的3×1位置矢量,而 ri,ci表示从Oi到Ci的位置矢量。力fi-1,i和力矩Ni1,i是相邻连杆i和i-1之间的耦合力和力矩。
Fmxkx
用牛顿方程:
Fma
பைடு நூலகம்
d (mx) mx dt
Fkxma Fm akx
机械手和环境之间的接触将在接触处产生相互 作用的力和力矩。每个机械手的关节运动都是由各 自的执行装置驱动的。相应的关节输入力矩,经手 臂的连杆传送到抓具,并在抓具处引起对环境的力 和力矩。
机器人学导论
机器人的动力学模型
牛顿-欧拉方程
拉格朗日方程
凯恩方法
雅可比矩阵
机器人的运动规划与控制
运动学:研究机器人末端执行器的位置和姿态信息 动力学:研究机器人末端执行器的力和力矩信息 运动规划:根据任务要求,规划机器人的运动轨迹 控制:通过控制器对机器人进行实时控制,实现运动规划
机器人的感知与感
05
知融合
01
添加章节标题
02
机器人学概述
机器人的定义与分类
机器人的定义: 机器人是一种能 够自动执行任务 的机器系统,具 有感知、决策、
执行等能力
机器人的分类: 根据应用领域、 结构形式、智能 化程度等不同, 机器人可分为多 种类型,如工业 机器人、服务机 器人、特种机器
人等
机器人学的研究领域
机器人设计:研究机器人的结构、 运动学和动力学
机器人的感知技术
添加项标题
视觉感知技术:通 过摄像头获取环境 信息,识别物体、 场景等,实现机器 人视觉导航、物体 识别等功能。
添加项标题
听觉感知技术:通 过麦克风获取声音 信息,识别语音、 音乐等,实现机器 人语音交互、音乐 识别等功能。
添加项标题
触觉感知技术:通过 触觉传感器获取接触 信息,识别物体的形 状、大小、硬度等, 实现机器人触觉导航、 物体抓取等功能。
执行器作用:根据控制信号执行相应的动作,如移动、转动等
机器人的感知系统
传感器类型:视觉、听觉、触觉等 传感器工作原理:图像处理、语音识别、触觉反馈等 传感器在机器人中的应用:导航、目标识别、物体抓取等 感知系统对机器人性能的影响:精度、稳定性、安全性等
机器人的运动学与
04
动力学
机器人的运动学方程
机器人学导论--ppt课件可编辑全文
关节变量
ppt课件
2
1.2 描述:位置、姿态和坐标系
位置描述
一旦建立坐标系,就能用一
个3*1的位置矢量对世界坐标 系中的任何点进行定位。因 为在世界坐标系中经常还要 定义许多坐标系,因此在位 置矢量上附加一信息,标明 是在哪一坐标系中被定义的。
例如:AP表示矢量P在A坐标系中的表示。
BP 表示矢量P在B坐标系中的表示。
c os90
c os120 c os30 c os90
XB XA
X
B
YA
X B Z A
c os90 c os90 cos0
]
YB X A YB YA YB Z A
ZB XA
ZB
YA
ZB Z A
ppt课件
5
坐标系的变换
完整描述上图中操作手位姿所需的信息为位置和姿态。机器人学中
在从多重解中选择解时,应根据具体情况,在避免碰撞的前 提下通常按“最短行程”准则来选择。同时还应当兼顾“多 移动小关节,少移动大关节”的原则。
ppt课件
23
4 PUMA560机器人运动学反解-反变换法
❖ 由于z4 , z5, z6 交于一点W,点W在基础坐标系中的位置仅与 1,2,3
有关。据此,可先解出 1,2,3 ,再分离出 4 ,5,6 ,并逐
PUMA560变换矩阵
ppt课件
21
将各个连杆变换矩阵相乘便得到PUMA560手臂变换矩阵
06T 01T (1)21T (2 )23T (3 )34T (4 )45T (5 )56T (6 )
什么是机器人运动学正解? 什么是机器人运动学反解?
ppt课件
22
操作臂运动学反解的方法可以分为两类:封闭解和数值解、 在进行反解时总是力求得到封闭解。因为封闭解的计算速度 快,效率高,便于实时控制。而数值法不具有些特点为。 操作臂的运动学反解封闭解可通过两种途径得到:代数解和 几何解。 一般而言,非零连杆参数越多,到达某一目标的方式也越多, 即运动学反解的数目也越多。
机器人学导论,第三章第四章

0 l3 0 l4 1 0 0 1
0 1 1 0 3 HT 0 0 0 0
0 0 1 0
0 0 0 1
四、写出运动方程(求出
0 H
0 H
T
)
T T T T T
0 1 1 2 2 3 3 H
0 1 0 0 1 0 0 0
中间连杆 分两种情况: 首、末连杆
3.4、连杆参数和连杆坐标系(续)
首、末连杆
与基座0固接的坐标系为 {0};
基座固定不动 {0}作为机器人操作的绝对 坐标系。 原则上坐标系 {0}可以任意规定(不受连 杆参数、关节变量影响 )。
为方便起见,对 {0}规定如下: 当第一个关节变量为零 时, {0}、 {1}重合({0}为{1}的原位状态)。
3.4、连杆参数和连杆坐标系(续)
三、连杆坐标系
连杆的描述 连杆连接的描述 连杆之间位姿的描述
采用方法: 在每个连杆固接一个坐 标系,用坐标系之间的 描述表示。 例如:
与基座固接的坐标系为 {0}; 与连杆1固接的坐标系为 {1}; 与连杆i固接的坐标系为 {i};
下一步讨论:坐标系 {i}的原点、轴的方向的确 定方法。
因此,有:
i 1 i
相对于动 坐标系而 言,遵循 “从左到 右”的原 则。
T RX ( i 1 ) DX ( ai 1 ) RZ ( i ) DZ ( di )
3.5 连杆变换和运动学方程(续) i 1 iT RX ( i 1 ) DX ( ai 1 ) RZ ( i ) DZ ( di )
求
0 H
T
一、建立D-H坐标系
Z3
Z2 X3 Z1 X2
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Inverse ManipulatorKinematicsAlgebraic solution by reduction to polynomialOutline2 Introduction IntroductionIntroductionThe Inverse kinematic is the basis of robot trajectory planning and control.5IntroductionExample :6Algebraic solution by reduction to polynomialOutline7SolvabilitySolvabilityFor the 6 DOF Puma 560 manipulator,we have:How to find the 6 joint variablesHere we might have 12 equations to solve for 6 independent variables. Constraints should be utilized.6 equations for 6 unknown variables9SolvabilityDifficulty: these 6 equations are nonlinear and transcendental equations.obtain the solution.whereSolvability11SolvabilitySolvabilityThe dexterous workspace is only one point(the origin). The There is no dexterous workspace. The reachable SolvabilityFor most industry robots, there is limitation for the joint variable range, thus the workspace is reduced.Only one attainable orientationIf a manipulator has less than 6 DOF, it can’t attain general goal position and orientation in 3D space.Workspace also depends on the tool-frame transformation.Solvability15There might be multiple solution in solving kinematic equations.Two possible solution for the same position and orientation.How to choose possible solution?Solvability” solution.The number of solutions depends on the number of and the allowable ranges of motion of the joints, also, it can be a function of other link parameters (link length, link twist, link offset, joint angle).Solvability2. Multiple solutions17The PUMA 560 can reach certain goals with 8different solutions.+Due to the limits of joints range, some of these 8 solutions could be inaccessible.SolvabilitySolvabilityAlgebraic solution by reduction to polynomial Outline20Manipulator Subspace21workspace is a portion of an n‐DOF subspacesubspace : planeworkspace : a subset of the plane{workspace} ⊂{subspace} ⊂{space}Manipulator Subspaceof a manipulator?Giving an expression for a manipulator’s wrist frame {w}to be free to take on all possible values.Manipulator SubspaceThe subspace of is given by:233R planar manipulatorAs are allowed to take on arbitrary values, the subspace is generatedNOTE : Link lengths and joints limits restrict the workspace of the manipulator to be a subset of this subspace.Algebraic solution by reduction to polynomial Outline24Algebraic vs. GeometricGiven the transformation matrix, solved for25Algebraic vs. GeometricD-H TableAlgebraic vs. GeometricThe transformation matrix can be computed viaand we haveAlgebraic vs. GeometricSpecification of the goal points can be accomplished by specifying three parameters: ..The transformation is assumed to have the following structurewhereThe above four nonlinear equations are used to solve for (unknown)Algebraic vs. GeometricThe parameters is How to solve for according thefollowing equations:Algebraic vs. Geometric1.Algebraic solution 30The is the only unknown parameter.Algebraic vs. GeometricStep1.In the solution algorithm, the above constraintshould be checked to determine whether a solution exist or not. If the constrain is not Algebraic vs. Geometric1.Algebraic solution Here, the choice of signs in the solution of corresponds to Algebraic vs. Geometric33Based on the solution of , we can get:whereAlgebraic vs. Geometricwe haveAlgebraic vs. GeometricNote:If a choice of sign is made in the solution of ,it will affect and thus affectStep5. Based on the fact that The solution of can be obtained.Algebraic vs. Geometric36solved for by using the tools of plane geometry.can utilize plane geometry directly to find a solution.Algebraic vs. Geometricconsidering the solid triangle, the “” can be applied to solve for as:37PossibleconfigurationThe other possible solution can be obtained by settingAlgebraic vs. Geometric2. Geometric solutionTo solve for , we find the express for angleand .38and can be solved via:then can be solved as:Algebraic vs. Geometric39the solution of can Algebraic solution by reduction to polynomial Outline40Algebraic solution by reduction to polynomialexpression in terms of a single variable.This is a very important geometric substitution used often in solving kinematic equations. These substitution convert transcendental equations into polynomial equations in Algebraic solution by reduction to polynomialGiven a transcendental equation try to solve for42Solutions:(when )Algebraic solution by reduction to polynomial Outline43Inverse manipulator kinematicsThe Unimation Puma 560 Industry Robot44Inverse manipulator kinematicsReview : D-H table45Inverse manipulator kinematicsReview : Transformation of each link.46Inverse manipulator kinematicsReview : Transformation of all link47whereInverse manipulator kinematics: Given the goal point and orientation specified by:(Known: Numerical value)Solve forInverse manipulator kinematics Separating out 1 unknown parameter How to solve ?Inverse manipulator kinematics2. Inverting to be obtain50 whereInverse manipulator kinematicsCheck the (2,4) elements on both sides ,we have Inverse manipulator kinematicsIntroduce the trigonometric(三角恒等变换) substitutions:52whereThen it can be obtained that:Inverse manipulator kinematics3. The left side of the following equation is known53Inverse manipulator kinematicsTaking square of the above two equations, and adding the results together, it can be obtained thatInverse manipulator kinematicsThe above equation depends only on , then similar steps can be followed to solve for as:4. Consider the following equationhave been solved, but is unknownInverse manipulator kinematics56Eq.(3.11) in Chapter3Check elements (1,4) and (2,4) on both sides, we haveInverse manipulator kinematics 57Inverse manipulator kinematics585. Now the left side of the following equation is knownEq.(3.11) in Chapter3Check the elements (1,3) and (3,3), it can be obtained thatInverse manipulator kinematics ca can be solved as:Case2.,The manipulator is in a singular configurationas axis 4 and 6 line up and cause the same motion of the last link of the robot. Thus is chosen arbitrarily.Inverse manipulator kinematics606. Consider the following equation again:andCheck the elements (1,3) and (3,3), it can be obtained thatInverse manipulator kinematics 61Hence, we can solve for as7. Applying the same method one more time, we havewhereCheck the elements (3,1) and (1,1), it can be obtained thatInverse manipulator kinematics62Thus we can solve for aswe can obtain eight sets of possible solutions, some of them will be discarded due to the joint angle limitsInverse manipulator kinematics63Summary1、原则:等号两端的矩阵中对应元素相等,列出相关方)、从含变量少的左边开始,如,向右递推,直到)、选择等号左边或右边矩阵中等于常数或仅含有一个变量的元素,列出相应元素对应的方程或方程组。